Vous aimerez peut-être aussi
- Intuitive Biostatistics & Normality Test & Sample PDFDocument605 pagesIntuitive Biostatistics & Normality Test & Sample PDFdewi100% (6)
- SolutionsShumway PDFDocument82 pagesSolutionsShumway PDFjuve A.Pas encore d'évaluation
- Lesson: Sampling Techniques: Teaching Guide in Statistics and ProbabilityDocument4 pagesLesson: Sampling Techniques: Teaching Guide in Statistics and ProbabilitySharlyn BalgoaPas encore d'évaluation
- No. 1 Activity T (Days) C (LE) TC (Days) C (LE)Document5 pagesNo. 1 Activity T (Days) C (LE) TC (Days) C (LE)Ahmed AymanPas encore d'évaluation
- Arch GarchDocument34 pagesArch GarchRishika JainPas encore d'évaluation
- N° Temperatura Error Absoluto TP (C°) T1 (C°) T2 (C°) T1 T2 1 2 3 4 5 6 7 8 9 10 T (C°)Document17 pagesN° Temperatura Error Absoluto TP (C°) T1 (C°) T2 (C°) T1 T2 1 2 3 4 5 6 7 8 9 10 T (C°)Aldo Renato Cuzquén TiradoPas encore d'évaluation
- LightrefractionDocument4 pagesLightrefractionSophia ChenPas encore d'évaluation
- Sondir LatihanDocument4 pagesSondir Latihannusa konstruksiPas encore d'évaluation
- Clay ShaleDocument70 pagesClay Shaleasnawi123Pas encore d'évaluation
- BD20022 OprDocument12 pagesBD20022 OprDeepPas encore d'évaluation
- Transient Analysis of Synchronous Generator: Step 1Document18 pagesTransient Analysis of Synchronous Generator: Step 1rmthilinaPas encore d'évaluation
- Results: Study of Reaction Kinetics: Hydrolysis of Ethyl AcetateDocument7 pagesResults: Study of Reaction Kinetics: Hydrolysis of Ethyl AcetateMuhammad Hazim TararPas encore d'évaluation
- Gain 0Document4 pagesGain 0Reza Aditya IrawanPas encore d'évaluation
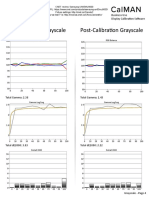
- Vizio E50-E1 CNET Review Calibration ReportDocument3 pagesVizio E50-E1 CNET Review Calibration ReportDavid KatzmaierPas encore d'évaluation
- N H T Log T T I Logh H I H ×T T : N X y X y X yDocument4 pagesN H T Log T T I Logh H I H ×T T : N X y X y X yJhenny JimenezPas encore d'évaluation
- 2 UnidadDocument5 pages2 UnidadLuis Manuel Miguel AcostaPas encore d'évaluation
- LibroDocument2 pagesLibroalonsovalentina0679Pas encore d'évaluation
- DemandDocument2 pagesDemandsyedwajihuddinPas encore d'évaluation
- Sysnchronous Generator Transient AnalysisDocument18 pagesSysnchronous Generator Transient AnalysisMilinda PrabhathPas encore d'évaluation
- Vizio P-Series Quantum PQ65-F1 CNET Calibration ResultsDocument3 pagesVizio P-Series Quantum PQ65-F1 CNET Calibration ResultsDavid KatzmaierPas encore d'évaluation
- Teme FizicaaaDocument12 pagesTeme FizicaaaLarissa TomlinsonPas encore d'évaluation
- 05 Modellingtutorial - 1storderresponses - NADocument2 pages05 Modellingtutorial - 1storderresponses - NAElie KabangaPas encore d'évaluation
- Opration Management TAMDocument5 pagesOpration Management TAMHK 'sPas encore d'évaluation
- C. Equal Percentage PlotDocument3 pagesC. Equal Percentage PlotAjay SatputePas encore d'évaluation
- O ISP ISP: Fraccion (X)Document11 pagesO ISP ISP: Fraccion (X)TobiI SempaiPas encore d'évaluation
- Fish To Xy To FmeaDocument25 pagesFish To Xy To FmeaSudhagarPas encore d'évaluation
- Savings Analysis Short Run and Long Run 1Document7 pagesSavings Analysis Short Run and Long Run 1davidPas encore d'évaluation
- Data Hasil Pengujian Sondir: Hambatan Konus, QC (kg/cm2) FR (FS/QC) x100%Document3 pagesData Hasil Pengujian Sondir: Hambatan Konus, QC (kg/cm2) FR (FS/QC) x100%Mardhan FatmonaPas encore d'évaluation
- Nomor Mahasiswa Nilai UTS Nilai Tugas Nilai UAS Nilai IndeksDocument9 pagesNomor Mahasiswa Nilai UTS Nilai Tugas Nilai UAS Nilai IndeksYuma CahyaPas encore d'évaluation
- Plus Dead Time) .: I. Tujuan PercobaanDocument10 pagesPlus Dead Time) .: I. Tujuan PercobaanIrvan TimberlakePas encore d'évaluation
- FísicaDocument3 pagesFísicaWacom AVPas encore d'évaluation
- Homework For Teaching SegmentDocument6 pagesHomework For Teaching Segmentapi-644462261Pas encore d'évaluation
- Driving Assignment (X-Xbar) 2 Miles Traveled (X) Travel Time (Y) X-Xbar (Mean) Y-Ybar (Mean)Document7 pagesDriving Assignment (X-Xbar) 2 Miles Traveled (X) Travel Time (Y) X-Xbar (Mean) Y-Ybar (Mean)Karen Kaye PasamontePas encore d'évaluation
- Chart Title: F (X) - 0.9572456446x + 64.7985 R 0.8287612674Document5 pagesChart Title: F (X) - 0.9572456446x + 64.7985 R 0.8287612674alfredoPas encore d'évaluation
- Figure 3.3: B Versus DWT Figure 3.4: D Versus DWT: DWT (T) DWT (T)Document2 pagesFigure 3.3: B Versus DWT Figure 3.4: D Versus DWT: DWT (T) DWT (T)ABHIROOP KPas encore d'évaluation
- 4 (Parentship Graph)Document2 pages4 (Parentship Graph)ABHIROOP KPas encore d'évaluation
- Teams Oppurtunities Target Actual Defects %Document4 pagesTeams Oppurtunities Target Actual Defects %ramaiahgantaPas encore d'évaluation
- Woodn PelletDocument7 pagesWoodn Pelletvj kumarPas encore d'évaluation
- Woodn PelletDocument7 pagesWoodn Pelletvj kumarPas encore d'évaluation
- Formative Assessment 2Document2 pagesFormative Assessment 2elyPas encore d'évaluation
- ANSWER KEYS StatisticsDocument16 pagesANSWER KEYS StatisticsJohn Cedrick MaglinaoPas encore d'évaluation
- 2023 Statistics Fin 6Document21 pages2023 Statistics Fin 6TPas encore d'évaluation
- TCL 65Q825 CNET Calibration ResultsDocument3 pagesTCL 65Q825 CNET Calibration ResultsDavid Katzmaier100% (1)
- DHRUV - Assignment BIOSTATISTICS (Graph)Document9 pagesDHRUV - Assignment BIOSTATISTICS (Graph)knightsoul1414Pas encore d'évaluation
- Aerospace Structures Analysis II PDFDocument12 pagesAerospace Structures Analysis II PDFNaqi AbbasPas encore d'évaluation
- Runoff Total (CFS) : Unit HydrographDocument2 pagesRunoff Total (CFS) : Unit HydrographRobette Juyze MarcosPas encore d'évaluation
- Pert Model CalculationDocument2 pagesPert Model CalculationasdfPas encore d'évaluation
- Graf IceDocument12 pagesGraf IceisspasPas encore d'évaluation
- The Absolute Relative Approximate Error, Ea (%) Vs Iteration, IDocument4 pagesThe Absolute Relative Approximate Error, Ea (%) Vs Iteration, IAfiq AhmadPas encore d'évaluation
- Rough WorkDocument6 pagesRough WorkTanu SinghPas encore d'évaluation
- (1a) (1b) (2a) (2b) (3a) (3b) : 80 F (X) 143.3745127664x + 24.9725124119 R 0.9787186303Document3 pages(1a) (1b) (2a) (2b) (3a) (3b) : 80 F (X) 143.3745127664x + 24.9725124119 R 0.9787186303surujJDPas encore d'évaluation
- Circular QueuesDocument1 pageCircular QueuesVina marie SolitarioPas encore d'évaluation
- Computer AssignmentDocument679 pagesComputer Assignmentjahanvi vermaPas encore d'évaluation
- Trading Strategies OptionsDocument6 pagesTrading Strategies OptionsThibaut Van DoorselaerePas encore d'évaluation
- Mektan GrafikDocument3 pagesMektan GrafikM Alif FathurohmanPas encore d'évaluation
- SolvingDocument15 pagesSolvingManoo ValievPas encore d'évaluation
- Chapter 03 PDFDocument80 pagesChapter 03 PDFnasim dashkhanePas encore d'évaluation
- Chapter6solutions PDFDocument34 pagesChapter6solutions PDFBeauponte Pouky MezonlinPas encore d'évaluation
- Samsung UN65MU9000 CNET Calibration ResultsDocument3 pagesSamsung UN65MU9000 CNET Calibration ResultsDavid KatzmaierPas encore d'évaluation
- Tugas Membership FunctionDocument5 pagesTugas Membership FunctionAgung HidayatPas encore d'évaluation
- Graficas Ens. Cer Alt1Document3 pagesGraficas Ens. Cer Alt1Lili Lee GiKwang JunJinPas encore d'évaluation
- Cause List 14Document11 pagesCause List 14Athar Hussain TanwriPas encore d'évaluation
- 5 - Logistic BrochureDocument2 pages5 - Logistic BrochureAthar Hussain TanwriPas encore d'évaluation
- 2 - Textile BrochureDocument2 pages2 - Textile BrochureAthar Hussain TanwriPas encore d'évaluation
- How To Do A Proper Thesis Defense Using The Right PowerPoint Presentation - SlideModelDocument12 pagesHow To Do A Proper Thesis Defense Using The Right PowerPoint Presentation - SlideModelAthar Hussain TanwriPas encore d'évaluation
- Major Economic Mineral Deposits of PakistanDocument1 pageMajor Economic Mineral Deposits of PakistanklatifdgPas encore d'évaluation
- Legal Guide To Invest in PakistanDocument15 pagesLegal Guide To Invest in PakistanAthar Hussain TanwriPas encore d'évaluation
- CP CPK Capability Calculation Sheet v3Document6 pagesCP CPK Capability Calculation Sheet v3Maria SalazarPas encore d'évaluation
- Stat and Prob Set ADocument20 pagesStat and Prob Set AAubrey CasocoPas encore d'évaluation
- Leveraging The Linear Regression Indicator For Trading SuccessDocument2 pagesLeveraging The Linear Regression Indicator For Trading SuccessBiantoroKunartoPas encore d'évaluation
- AnswerDocument5 pagesAnswerROSE ANN SAGUROTPas encore d'évaluation
- Slides Nov2019 Day4Document28 pagesSlides Nov2019 Day4Jovanderson JacksonPas encore d'évaluation
- Hair Eye TotalDocument20 pagesHair Eye TotalEdgar Miguel MPas encore d'évaluation
- In-Class Problem Set # 3 (Additional Problem) : ECON 310 Name(s)Document1 pageIn-Class Problem Set # 3 (Additional Problem) : ECON 310 Name(s)tranthanhnha94Pas encore d'évaluation
- Kruskal Wallis or H-TestDocument11 pagesKruskal Wallis or H-TestHello HiPas encore d'évaluation
- EDU702 Quantitative ResearchDocument31 pagesEDU702 Quantitative ResearchharyaniPas encore d'évaluation
- 6) BIOSTATISTICsDocument99 pages6) BIOSTATISTICsMadhulikaPas encore d'évaluation
- Relationship Between Nurse Managers' Talent Management and Their Organizational CommitmentDocument18 pagesRelationship Between Nurse Managers' Talent Management and Their Organizational CommitmentjijiPas encore d'évaluation
- Pertemuan 9Document34 pagesPertemuan 9Mala NingsihPas encore d'évaluation
- Econometrics - Functional FormsDocument22 pagesEconometrics - Functional FormsNidhi KaushikPas encore d'évaluation
- 09 Handout 1Document8 pages09 Handout 1Arian RoxasPas encore d'évaluation
- Aqa Syllabus PDFDocument45 pagesAqa Syllabus PDFRobert EdwardsPas encore d'évaluation
- Business Statistics 2023-25Document4 pagesBusiness Statistics 2023-25akshaymatey007Pas encore d'évaluation
- Hypothesis ProblemsDocument8 pagesHypothesis ProblemsFUNTV5Pas encore d'évaluation
- Chapter3-130912 121330Document95 pagesChapter3-130912 121330Zuliyana ZulkifleePas encore d'évaluation
- MB0050 - Descriptive Practice QPDocument3 pagesMB0050 - Descriptive Practice QPAbdul Lateef Khan100% (1)
- Audit Sampling Notes and Answers To Quiz. Accounting Help.Document17 pagesAudit Sampling Notes and Answers To Quiz. Accounting Help.Cykee Hanna Quizo LumongsodPas encore d'évaluation
- Chapter 12Document26 pagesChapter 12maroof_mirPas encore d'évaluation
- Final Examination: SampleDocument7 pagesFinal Examination: SampleJin NguyenPas encore d'évaluation
- Business Analytics: Advance: Simple & Multiple Linear RegressionDocument38 pagesBusiness Analytics: Advance: Simple & Multiple Linear RegressionKetan BhaleraoPas encore d'évaluation
- Business Statistics and RM: Hamendra Dangi 9968316938Document21 pagesBusiness Statistics and RM: Hamendra Dangi 9968316938Adil AliPas encore d'évaluation
- Metrix in MLDocument7 pagesMetrix in MLGirish ThakurPas encore d'évaluation
- 7 0 0 4 MBA (Sem I) Theory Examination 2017-18 Business StatisticsDocument3 pages7 0 0 4 MBA (Sem I) Theory Examination 2017-18 Business StatisticsNishant TripathiPas encore d'évaluation
- 30 Questions To Test A Data Scientist On Linear Regression PDFDocument13 pages30 Questions To Test A Data Scientist On Linear Regression PDFpyp_pypPas encore d'évaluation
- Statistics For Management - Assignments SolvedDocument9 pagesStatistics For Management - Assignments Solvednitin_bslPas encore d'évaluation