Vous aimerez peut-être aussi
- The Inverse Z-TransformDocument16 pagesThe Inverse Z-Transformdeekshasingh96Pas encore d'évaluation
- DSP Lecture 2 AUL v2Document15 pagesDSP Lecture 2 AUL v2EngSamKassasPas encore d'évaluation
- The Inverse Z-Transform: Instructor: Dr. Ghazi Al Sukkar Dept. of Electrical Engineering The University of Jordan EmailDocument31 pagesThe Inverse Z-Transform: Instructor: Dr. Ghazi Al Sukkar Dept. of Electrical Engineering The University of Jordan EmailWasif IjazPas encore d'évaluation
- Digital Signal Processing: Properties of The Z-TransformDocument13 pagesDigital Signal Processing: Properties of The Z-TransformJulie ThorPas encore d'évaluation
- ZT Lecture-4Document13 pagesZT Lecture-4322103312181 SAI ANAND MEDAPATIPas encore d'évaluation
- Two-Dimensional NMR: Preparation Evolution Mixing Period DetectionDocument7 pagesTwo-Dimensional NMR: Preparation Evolution Mixing Period DetectionOmoshalewa AjayiPas encore d'évaluation
- Formula Sheet DSP FullDocument13 pagesFormula Sheet DSP FullMehmetPas encore d'évaluation
- SP - Lecture - W7 - 2Document30 pagesSP - Lecture - W7 - 2Engkhadega HaresPas encore d'évaluation
- DSP Lecture 4 PDFDocument14 pagesDSP Lecture 4 PDFSana LiaqatPas encore d'évaluation
- F.A.L. Conducive Engineering Review Center: 2 Floor, 1901 (J) C.M. Recto Avenue, Sampaloc, ManilaDocument2 pagesF.A.L. Conducive Engineering Review Center: 2 Floor, 1901 (J) C.M. Recto Avenue, Sampaloc, ManilaRosette de AsisPas encore d'évaluation
- The Z-TransformDocument16 pagesThe Z-TransformDr. Mohiuddin AhmadPas encore d'évaluation
- 9-FIR Filters 2009Document41 pages9-FIR Filters 2009SmartunblurrPas encore d'évaluation
- Introduction To Machinery Dynamics Part 3Document5 pagesIntroduction To Machinery Dynamics Part 3Fatima NusserPas encore d'évaluation
- XN U N XN XZ XNZ U NZ Z Z XZ ZZ XZDocument2 pagesXN U N XN XZ XNZ U NZ Z Z XZ ZZ XZSudhakar KumarPas encore d'évaluation
- Chapter 3Document34 pagesChapter 3Charlaine Bufi PanchoPas encore d'évaluation
- ch2 The Z - Transform With ExampleDocument15 pagesch2 The Z - Transform With ExamplePuduru BharathiPas encore d'évaluation
- Formula Sheet - ANOVA, Chi-Square & RegressionDocument1 pageFormula Sheet - ANOVA, Chi-Square & RegressionAnonymous Xlpj86laPas encore d'évaluation
- Z-Transforms Module - 3 (18MAT31) 4Document37 pagesZ-Transforms Module - 3 (18MAT31) 4Sachin AgnihotriPas encore d'évaluation
- Lecture 1 IIR Digital Filter Design DGDocument16 pagesLecture 1 IIR Digital Filter Design DGAlina RazaPas encore d'évaluation
- 3a. Paramagnetism 2 - Classical TreatmentDocument22 pages3a. Paramagnetism 2 - Classical Treatmentmd rupomPas encore d'évaluation
- 21d MarcDocument5 pages21d MarckryzanderPas encore d'évaluation
- Gupta Lecture4Document58 pagesGupta Lecture4Rakesh PogulaPas encore d'évaluation
- 3D Numericals 2Document17 pages3D Numericals 2Pavan KulkarniPas encore d'évaluation
- EE302 The Z-TransformDocument23 pagesEE302 The Z-TransformMohmed Al NajarPas encore d'évaluation
- Vibration PDFDocument13 pagesVibration PDFJohannis ReyPas encore d'évaluation
- LogarithmsDocument13 pagesLogarithmssellPas encore d'évaluation
- Tranformasi ZDocument21 pagesTranformasi ZXhi-tham MohammedPas encore d'évaluation
- Math FormulaDocument2 pagesMath Formulashahmeer sultanPas encore d'évaluation
- Fedder - PHD - Thesis. Simulation of MEM SystemsDocument12 pagesFedder - PHD - Thesis. Simulation of MEM SystemsBharat Bhushan SharmaPas encore d'évaluation
- ECS455!5!4 - Cyclic PrefixDocument21 pagesECS455!5!4 - Cyclic Prefixali AlinezhadPas encore d'évaluation
- EEE 237 Z TransformDocument68 pagesEEE 237 Z Transformmahir faisalPas encore d'évaluation
- 18 ChorpDocument3 pages18 ChorpkryzanderPas encore d'évaluation
- Singularities Notes 9: David R. Jackson Fall 2020Document22 pagesSingularities Notes 9: David R. Jackson Fall 2020Perum RajabasaPas encore d'évaluation
- Formula Sheet PDFDocument1 pageFormula Sheet PDFsizza100% (1)
- Analytic GeometryDocument53 pagesAnalytic GeometrySupriyo ChakrabortyPas encore d'évaluation
- Linear Algebra PyqDocument3 pagesLinear Algebra PyqsuryanshchauhanPas encore d'évaluation
- Finite Impulse Response FiltersDocument24 pagesFinite Impulse Response Filtersboulainine houriaPas encore d'évaluation
- Ckla GK U9 TGDocument158 pagesCkla GK U9 TGiX i0Pas encore d'évaluation
- Ex. Sine LawDocument2 pagesEx. Sine Lawمحمد حاتم- Mohamed HatemPas encore d'évaluation
- ECE411 - 4a - The Z-TransformDocument7 pagesECE411 - 4a - The Z-TransformMartine JimenezPas encore d'évaluation
- Chapter 3 C DH Representation For Robotic ManipulatorsDocument88 pagesChapter 3 C DH Representation For Robotic ManipulatorsCharlton S.Inao100% (1)
- Example 2 Uniform Infinite Line ChargeDocument2 pagesExample 2 Uniform Infinite Line ChargeBill WhitePas encore d'évaluation
- Digital Filter Structures: K N X B K N y A N yDocument54 pagesDigital Filter Structures: K N X B K N y A N ygigartukudaPas encore d'évaluation
- CH 8. Reprezentation of Discrete Signals in The Transformed DomainDocument33 pagesCH 8. Reprezentation of Discrete Signals in The Transformed DomainIrina PetrePas encore d'évaluation
- Electronic Configuration.Document12 pagesElectronic Configuration.spidy warriorsPas encore d'évaluation
- Mass Moment of Inertia-Test1Document2 pagesMass Moment of Inertia-Test1VisitOn.T.witte.rPas encore d'évaluation
- Schäfer PdfaDocument2 pagesSchäfer PdfaMontage MotionPas encore d'évaluation
- 3c3 UseSeries SolveDEs - Stu PDFDocument9 pages3c3 UseSeries SolveDEs - Stu PDFhansleyPas encore d'évaluation
- TCE Mathematics Methods Foundation External Exam Information Sheet 2018Document4 pagesTCE Mathematics Methods Foundation External Exam Information Sheet 2018MathKeysPas encore d'évaluation
- The Z-Transform: Electrical & Electronics Engineering Department Eastern Visayas State UniversityDocument39 pagesThe Z-Transform: Electrical & Electronics Engineering Department Eastern Visayas State Universityryan reasPas encore d'évaluation
- 6 SYSC5602 Z Transform 2009Document49 pages6 SYSC5602 Z Transform 2009SmartunblurrPas encore d'évaluation
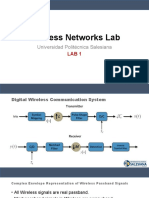
- Wireless Networks Lab: Universidad Politécnica SalesianaDocument22 pagesWireless Networks Lab: Universidad Politécnica SalesianaDiego Andrés CujiPas encore d'évaluation
- Frequency TransformationDocument21 pagesFrequency TransformationMavinePas encore d'évaluation
- Power Screw: Square Threads Acme ThreadsDocument9 pagesPower Screw: Square Threads Acme ThreadstnchsgPas encore d'évaluation
- Chap 3 Z TransformDocument93 pagesChap 3 Z TransformJames Jone100% (1)
- 8 Z TransformsDocument47 pages8 Z TransformsGhubaida HassaniPas encore d'évaluation
- Transform Definition: - Definition 2.1 Given The Causal Sequence Then Its Z-Transform Is Defined AsDocument15 pagesTransform Definition: - Definition 2.1 Given The Causal Sequence Then Its Z-Transform Is Defined Aslaith adnanPas encore d'évaluation
- Equations For Heat Transfer v1p2 191014Document8 pagesEquations For Heat Transfer v1p2 191014rlekminePas encore d'évaluation
- Summary of EM Sign ConventionsDocument1 pageSummary of EM Sign Conventions丁安磊Pas encore d'évaluation
- Chapter 4 (B) Light Detectors v2Document47 pagesChapter 4 (B) Light Detectors v2eee06sharifPas encore d'évaluation
- 2019-08-26 - Shariful+Greg - OEO Stabilization ContinuedDocument11 pages2019-08-26 - Shariful+Greg - OEO Stabilization Continuedeee06sharifPas encore d'évaluation
- Investigation of Phase Space Dynamics of A Quantum Dash Laser With Opto-Electronic FeedbackDocument5 pagesInvestigation of Phase Space Dynamics of A Quantum Dash Laser With Opto-Electronic Feedbackeee06sharifPas encore d'évaluation
- Syllabus - BSC - EEE - 2016-17, 13.11.2016 - New BookDocument113 pagesSyllabus - BSC - EEE - 2016-17, 13.11.2016 - New Bookeee06sharifPas encore d'évaluation
- L-I Curves: - Different Measurements Found On Optical Power Meters From Newport and ThorlabsDocument3 pagesL-I Curves: - Different Measurements Found On Optical Power Meters From Newport and Thorlabseee06sharifPas encore d'évaluation
- Theory ResultDocument15 pagesTheory Resulteee06sharifPas encore d'évaluation
- OE Porous Guides THZDocument12 pagesOE Porous Guides THZeee06sharifPas encore d'évaluation
- Solar Panel PDFDocument4 pagesSolar Panel PDFRavinder SinghPas encore d'évaluation
- Design of Subwavelength Optical Fibre For Low-Loss Terahertz TransmissionDocument4 pagesDesign of Subwavelength Optical Fibre For Low-Loss Terahertz Transmissioneee06sharifPas encore d'évaluation
- TAU - DLR Deutsh Software Flow Aero SolverDocument7 pagesTAU - DLR Deutsh Software Flow Aero SolverilyesingenieurPas encore d'évaluation
- Milano LecturesDocument60 pagesMilano LecturesSkiptippPas encore d'évaluation
- Full Paper 341Document11 pagesFull Paper 341Mauro TognocchiPas encore d'évaluation
- Esoteric PhysicsDocument107 pagesEsoteric PhysicsKelvins Momanyi100% (3)
- Weierstrass M-Test PDFDocument8 pagesWeierstrass M-Test PDFkhitab12Pas encore d'évaluation
- Complete The Truth Table For This Logic Circuit:: 9608/31/M/J/15 © UCLES 2015Document19 pagesComplete The Truth Table For This Logic Circuit:: 9608/31/M/J/15 © UCLES 2015Nayu OumiPas encore d'évaluation
- Inverse Trig Function Dr. Maslan Osman UtmDocument28 pagesInverse Trig Function Dr. Maslan Osman UtmZazliana IzattiPas encore d'évaluation
- Mini ProjectDocument12 pagesMini ProjectParth PethkarPas encore d'évaluation
- Problem Solving & Decision Making (HBO)Document5 pagesProblem Solving & Decision Making (HBO)Leofold Laluna Salas Jr.Pas encore d'évaluation
- Pre - Final Exam Maths 2a Bapatla Junior CollegeDocument3 pagesPre - Final Exam Maths 2a Bapatla Junior Collegeaadi venkiPas encore d'évaluation
- Course Description CatalogDocument56 pagesCourse Description CatalogstefPas encore d'évaluation
- Summer Practice Test 2 AnswersDocument24 pagesSummer Practice Test 2 AnswersLisa Dea SaryPas encore d'évaluation
- Association Between Gold Prices and Stock Market Returns Empirical Evidence From NseDocument7 pagesAssociation Between Gold Prices and Stock Market Returns Empirical Evidence From NseSai TejaPas encore d'évaluation
- Analysis of Mine Haul Truck Fuel Consumption ReportDocument24 pagesAnalysis of Mine Haul Truck Fuel Consumption ReportMamita TsilaitraPas encore d'évaluation
- Algorithm LecturesDocument117 pagesAlgorithm Lecturesashodhiya14Pas encore d'évaluation
- ModelingSCBF PDFDocument28 pagesModelingSCBF PDFadnanraisahmedPas encore d'évaluation
- Automatic Control II Hover V7Document22 pagesAutomatic Control II Hover V7Arsalan AhmadPas encore d'évaluation
- Lectures On Kinetic Theory of Gases and Statistical Physics: Alexander A. SchekochihinDocument157 pagesLectures On Kinetic Theory of Gases and Statistical Physics: Alexander A. Schekochihinjk bhaiiiPas encore d'évaluation
- Access Modifiers in JavaDocument6 pagesAccess Modifiers in Javaimjd2Pas encore d'évaluation
- Original PDF Calculus Concepts and Contexts 4th Edition PDFDocument41 pagesOriginal PDF Calculus Concepts and Contexts 4th Edition PDFbert.roesch92897% (32)
- AWS90 Ch05 ModalDocument24 pagesAWS90 Ch05 ModalCinitha APas encore d'évaluation
- Exam PM Notes ExamplesDocument2 pagesExam PM Notes ExamplesJaime R. SandovalPas encore d'évaluation
- Flexmix IntroDocument18 pagesFlexmix Intromostafa faroukPas encore d'évaluation
- Short-Term Electricity Demand Forecasting With MARS, SVR and ARIMADocument16 pagesShort-Term Electricity Demand Forecasting With MARS, SVR and ARIMAharri8026Pas encore d'évaluation
- Workflow Basic Config and ConceptsDocument87 pagesWorkflow Basic Config and ConceptsJaiPas encore d'évaluation
- CHECKMATE #Yourlastmove (27 December) ...Document22 pagesCHECKMATE #Yourlastmove (27 December) ...rithulblockchainPas encore d'évaluation
- Anatel PDFDocument4 pagesAnatel PDFmaneshdixit4312Pas encore d'évaluation
- CH5100 Peristaltic FlowDocument21 pagesCH5100 Peristaltic FlowashuiskeshavPas encore d'évaluation
- Lesson 1 MMWDocument12 pagesLesson 1 MMWAuria Graceil AlabasoPas encore d'évaluation