Vous aimerez peut-être aussi
- Transformaciones Isometricas 6 BasicoDocument25 pagesTransformaciones Isometricas 6 BasicoHector SilvaPas encore d'évaluation
- Movimientos en El PlanoDocument14 pagesMovimientos en El PlanoPaola LunaPas encore d'évaluation
- Semana 1 AritmeticaDocument2 pagesSemana 1 AritmeticaSegundo FernandezPas encore d'évaluation
- La SecanteDocument8 pagesLa Secantemarit2504Pas encore d'évaluation
- Áreas de Conservación PrivadaDocument4 pagesÁreas de Conservación PrivadaBriggith Sullca Gonzalo100% (1)
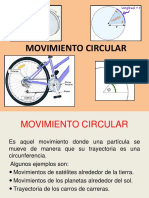
- Movimiento CircularDocument13 pagesMovimiento CircularKatherine Tamara RosasPas encore d'évaluation
- ExamenParaSemilleroGEO Unid 04Document1 pageExamenParaSemilleroGEO Unid 04Julio FernandezPas encore d'évaluation
- Ecuaciones de La RectaDocument11 pagesEcuaciones de La RectaDANIEL ALEXANDER VELEZ ESPINPas encore d'évaluation
- Ficha de Trabajo - 2do AñoDocument3 pagesFicha de Trabajo - 2do AñoLuisPas encore d'évaluation
- Caida LibreDocument20 pagesCaida Librejoreor50% (2)
- Evaluación DiagnosticaDocument4 pagesEvaluación DiagnosticaOscar RosalesPas encore d'évaluation
- Trabajo de InvestigaciónDocument21 pagesTrabajo de InvestigaciónAbraham Rodriguez HernandezPas encore d'évaluation
- Historia de La Tabla PeriódicaDocument1 pageHistoria de La Tabla PeriódicafuamencioPas encore d'évaluation
- Presentación 01. Introducción. Materia y MediciónDocument57 pagesPresentación 01. Introducción. Materia y MediciónLilly RFPas encore d'évaluation
- Geometria Postulados PDFDocument45 pagesGeometria Postulados PDFJaime vargasPas encore d'évaluation
- Equilibrio de Una ParticulaDocument44 pagesEquilibrio de Una ParticulaCarolina RossanaPas encore d'évaluation
- Infografía MuaDocument2 pagesInfografía MuaMonica Alejandrina Calan PereraPas encore d'évaluation
- Ejemplos de Centro de Gravedad PDFDocument2 pagesEjemplos de Centro de Gravedad PDFLuis Brayan AlejoPas encore d'évaluation
- Recuros Didacticos FísicaDocument5 pagesRecuros Didacticos Físicalegna zedlav100% (1)
- Paralelismo CuboDocument1 pageParalelismo CuboJohanPas encore d'évaluation
- 3.7.-Esferas, Zona Esférica, Casquete Esférico, Huso Esférico, Anillo Esférico, Segmento Esférico, Áreas y VolúmenesDocument6 pages3.7.-Esferas, Zona Esférica, Casquete Esférico, Huso Esférico, Anillo Esférico, Segmento Esférico, Áreas y VolúmenesGabriel Villamar MoralesPas encore d'évaluation
- Razones TrigonomDocument6 pagesRazones TrigonomAnida ApontePas encore d'évaluation
- Ángulo Entre Dos RectasDocument7 pagesÁngulo Entre Dos RectasPancho MorilloPas encore d'évaluation
- F - 4°año - S4 - Análisis Vectorial IIDocument8 pagesF - 4°año - S4 - Análisis Vectorial IIYoni Espinoza RiveraPas encore d'évaluation
- Química 5to-1er y 2do BimestreDocument28 pagesQuímica 5to-1er y 2do BimestreRICHARD VILLARPas encore d'évaluation
- Fuerzas de Cohesión y Adhesión Del Agua.Document1 pageFuerzas de Cohesión y Adhesión Del Agua.Alexander De La Cruz PaibaPas encore d'évaluation
- 3er Fisica Magnitudes FisicasDocument2 pages3er Fisica Magnitudes FisicasAnonymous dfBip30% (1)
- Fisica Mapa de McuvDocument1 pageFisica Mapa de McuvJeyson DelgadoPas encore d'évaluation
- 5 - Clase Isomería ÓpticaDocument31 pages5 - Clase Isomería ÓpticaMarceloValeriaPas encore d'évaluation
- Practica Calificada de ElectrostaticaDocument1 pagePractica Calificada de ElectrostaticaNajhim Cárdenas RodríguezPas encore d'évaluation
- Ejercicios de Punto de DivisiónDocument3 pagesEjercicios de Punto de DivisiónyomeroelreyPas encore d'évaluation
- Proteinas de DefensaDocument34 pagesProteinas de DefensaEduardo Arroyo0% (2)
- Relaciones Metricas en La Circunferencia PDFDocument19 pagesRelaciones Metricas en La Circunferencia PDFfernandoPas encore d'évaluation
- Matematica3 Semana 7 - Dia 4 Resolvamos Problemas Ccesa007Document3 pagesMatematica3 Semana 7 - Dia 4 Resolvamos Problemas Ccesa007Demetrio Ccesa Rayme100% (1)
- Fuerza Centripeta y CentrifugaDocument2 pagesFuerza Centripeta y CentrifugaAva Van Dort0% (1)
- Esquema Visual de Análisis VectorialDocument5 pagesEsquema Visual de Análisis VectorialLisset SandovalPas encore d'évaluation
- 21 - OvalosDocument1 page21 - OvalosvillegassbPas encore d'évaluation
- Semana 4 Academia - Cinemática II, MruvDocument2 pagesSemana 4 Academia - Cinemática II, MruvJoel OCHOA PADILLAPas encore d'évaluation
- Ejercicios PropuestosDocument1 pageEjercicios PropuestosssasaPas encore d'évaluation
- Monografia Proyecto TrigonometriaDocument20 pagesMonografia Proyecto Trigonometrialicenciado2012100% (2)
- Proyecciones IsometricasDocument3 pagesProyecciones IsometricasBrayan SegoviaPas encore d'évaluation
- EJERCICIOS RESUELTOS Dinamica - 2Document2 pagesEJERCICIOS RESUELTOS Dinamica - 2Cecilia Laime0% (1)
- RP-MAT4-K03-Ficha 3Document13 pagesRP-MAT4-K03-Ficha 3Wilson Ticona0% (1)
- Mapa Conceptual VectoresDocument2 pagesMapa Conceptual VectoresDe la Cruz Castro Ricardo Lorenzo0% (1)
- CALCULO sssssEJERCICIOS PDFDocument2 pagesCALCULO sssssEJERCICIOS PDFScka BjornPas encore d'évaluation
- El Tejido Óseo para Tercero de Secundaria PDFDocument6 pagesEl Tejido Óseo para Tercero de Secundaria PDFJuan ArvelaezPas encore d'évaluation
- Equilibrio de Partículas Método Del TrianguloDocument2 pagesEquilibrio de Partículas Método Del TrianguloJovenes IngenierosPas encore d'évaluation
- Práctica TrinángulosDocument2 pagesPráctica TrinángulosElard Chilon YoplaPas encore d'évaluation
- Laboratorio de PalancasDocument6 pagesLaboratorio de PalancasANA MILENA SILVA NARANJOPas encore d'évaluation
- Capacitores en Serie y en ParaleloDocument11 pagesCapacitores en Serie y en ParaleloLuis Diego Leones ArrietaPas encore d'évaluation
- Tema 08 - Regla de Descuento I PDFDocument2 pagesTema 08 - Regla de Descuento I PDFLucho H. G.100% (1)
- 1 Trigonometría 5 - Angulo Trigonometrico PDFDocument4 pages1 Trigonometría 5 - Angulo Trigonometrico PDFAlexander CernaPas encore d'évaluation
- Sesion No 3 - Vectores CartesianosDocument21 pagesSesion No 3 - Vectores CartesianosJuan Felipe VillamizarPas encore d'évaluation
- Definición de TrapecioDocument6 pagesDefinición de TrapecioMonica BrezovecPas encore d'évaluation
- Ficha 4-5to-Ua1-2024Document3 pagesFicha 4-5to-Ua1-2024jhossylyjustorojasPas encore d'évaluation
- Informe de Matematicas 1Document12 pagesInforme de Matematicas 1sandraPas encore d'évaluation
- Laboratorio 10Document2 pagesLaboratorio 10Laisha AvendañoPas encore d'évaluation
- Transformaciones GeometricasDocument8 pagesTransformaciones GeometricasBrenda Pava50% (2)
- Análisis de Las Propiedades de La Rotación y de La Traslación de FigurasDocument6 pagesAnálisis de Las Propiedades de La Rotación y de La Traslación de FigurasFrancisco Javier Castro33% (3)
- Isometría y Transformaciones Isométricas: Sistema de CoordenadasDocument5 pagesIsometría y Transformaciones Isométricas: Sistema de CoordenadasJosé LeyesPas encore d'évaluation
- Capitulo Educacion Censo Poblacion ViviendaDocument19 pagesCapitulo Educacion Censo Poblacion ViviendaXaviAlonsoPas encore d'évaluation
- Guion PracticasDocument38 pagesGuion PracticasRicardo mir100% (1)
- Preguntas Ee 341Document3 pagesPreguntas Ee 341Gabriel SylarPas encore d'évaluation
- Biologia 1 - Guía 3 Anual 2023 - 12Document3 pagesBiologia 1 - Guía 3 Anual 2023 - 12Rodry Maní turpoPas encore d'évaluation
- La Gramática EstructuralDocument19 pagesLa Gramática EstructuralMayco BolvitoPas encore d'évaluation
- SulfonilureasDocument4 pagesSulfonilureasapi-629754207Pas encore d'évaluation
- EnsayoDocument6 pagesEnsayoStephanie BermejoPas encore d'évaluation
- 2 - Capítulo 3 GinaDocument24 pages2 - Capítulo 3 GinaLuluRamirezPas encore d'évaluation
- Examen Solidos GeometricosDocument1 pageExamen Solidos GeometricosROMEL TENORIOPas encore d'évaluation
- Fundamentos de La MicrobiologiaDocument1 pageFundamentos de La MicrobiologiaAzul GarciaPas encore d'évaluation
- Música e Instrumentos ParaguayosDocument3 pagesMúsica e Instrumentos ParaguayosRay SpenderPas encore d'évaluation
- Tema 2 Transporte y Distribucion de La EnergiaDocument11 pagesTema 2 Transporte y Distribucion de La Energiaanagarrod_8Pas encore d'évaluation
- NRF 313 CoriolisDocument46 pagesNRF 313 CoriolisAlejandro LopezPas encore d'évaluation
- Calculos Cueva de La Mora - r2Document26 pagesCalculos Cueva de La Mora - r2Roberto SalazarPas encore d'évaluation
- Supuestos Prácticos Sobre La Ley de Seguridad CiudadanaDocument6 pagesSupuestos Prácticos Sobre La Ley de Seguridad CiudadanaDiego Aragón OrtegaPas encore d'évaluation
- Sesion 1 20-06-22 Inicial 4 AñosDocument13 pagesSesion 1 20-06-22 Inicial 4 AñosLuis Alberto Angulo PlasenciaPas encore d'évaluation
- Actividad Basica de La InformaciónnnnnnDocument11 pagesActividad Basica de La InformaciónnnnnnJavier Orlando BALLEN CHAVEZPas encore d'évaluation
- Ejemplo para Examen 2018Document1 pageEjemplo para Examen 2018José MartínezPas encore d'évaluation
- Trabajo de Taller de FutbolDocument28 pagesTrabajo de Taller de FutbolMedalyBetsyPas encore d'évaluation
- Reforzamos Nuestros AprendizajesDocument7 pagesReforzamos Nuestros AprendizajesBeatriz EvazPas encore d'évaluation
- Planes de Desarrollo Del Capital HumanoDocument4 pagesPlanes de Desarrollo Del Capital Humanokarina senterePas encore d'évaluation
- Metodo RuscaDocument14 pagesMetodo RuscaYeferson TrujilloPas encore d'évaluation
- Dax2017774737 PDFDocument471 pagesDax2017774737 PDFkatiaPas encore d'évaluation
- FI 004 Inspección de Línea de Vida Horizontal R01Document1 pageFI 004 Inspección de Línea de Vida Horizontal R01Asael SalazarPas encore d'évaluation
- RDR 1269 Aprendizaje para La VidaDocument94 pagesRDR 1269 Aprendizaje para La VidaFelicita AlvarezPas encore d'évaluation
- Tema 1 - Concepto PNL, AntecedentesDocument19 pagesTema 1 - Concepto PNL, AntecedentesDiego Andres Florez GutierrezPas encore d'évaluation
- NEUROSEGMENTACIÓNDocument3 pagesNEUROSEGMENTACIÓNsauloPas encore d'évaluation
- Funcionamiento DensímetrosDocument16 pagesFuncionamiento DensímetrosLaura GuarguatiPas encore d'évaluation
- Manual Del Auditor 2021Document241 pagesManual Del Auditor 2021Roberto SánchezPas encore d'évaluation
- Creación de Plan EstratégicoDocument79 pagesCreación de Plan Estratégicogormeno055139Pas encore d'évaluation