Vous aimerez peut-être aussi
- Sanchez - Integracion Curricular TICDocument6 pagesSanchez - Integracion Curricular TICKarina PeraltaPas encore d'évaluation
- GSG-05.03 R1 Control de La Hermeticidad de Fuentes Radiactivas EncapsuladasDocument42 pagesGSG-05.03 R1 Control de La Hermeticidad de Fuentes Radiactivas EncapsuladasJairo NiñoPas encore d'évaluation
- ¿Cómo Considera Usted Se Debe Replantear El Sistema Educativo Venezolano para Garantizar La Continuidad Del Proceso de Aprendizaje?Document2 pages¿Cómo Considera Usted Se Debe Replantear El Sistema Educativo Venezolano para Garantizar La Continuidad Del Proceso de Aprendizaje?FlorsPas encore d'évaluation
- Catalogo 2018 Senalamientos y Dispositivos Viales-9771300Document94 pagesCatalogo 2018 Senalamientos y Dispositivos Viales-9771300Samuel MontejoPas encore d'évaluation
- S7-300-Configuracion Manual de Instalacion PDFDocument242 pagesS7-300-Configuracion Manual de Instalacion PDFFernandoJoseRomeroPas encore d'évaluation
- Introducción A La Contabilidad en Gestion de CostosDocument43 pagesIntroducción A La Contabilidad en Gestion de CostosFernando MartinezPas encore d'évaluation
- Silabo Comunicacion IIDocument7 pagesSilabo Comunicacion IIBush Fuentes GutiérrezPas encore d'évaluation
- Practica 3 RosaDocument5 pagesPractica 3 RosaAnonymous 8TsRgHiYPtPas encore d'évaluation
- Motivación Laboral PPT PDFDocument14 pagesMotivación Laboral PPT PDFMargot GálvezPas encore d'évaluation
- Esquema Eléctrico CuadroDocument44 pagesEsquema Eléctrico CuadroJavier SamudioPas encore d'évaluation
- Analisis Foda de La CompetenciaDocument2 pagesAnalisis Foda de La CompetenciaKaren Bravo Sanchez0% (1)
- Informe #01 - Esp CalidadDocument5 pagesInforme #01 - Esp CalidadNayely Lino ValenzuelaPas encore d'évaluation
- Sistemas InformáticosDocument2 pagesSistemas InformáticosCarmen FlorezPas encore d'évaluation
- Edicto Cancelación RVP Revisado NataliaDocument33 pagesEdicto Cancelación RVP Revisado NataliaVeronica FuentesPas encore d'évaluation
- Diagnóstico ITunesDocument2 pagesDiagnóstico ITunesAngel CastilloPas encore d'évaluation
- Texto Como Proceso ComunicactivoDocument32 pagesTexto Como Proceso ComunicactivoJose CorreaPas encore d'évaluation
- Taller BSC y SGCDocument4 pagesTaller BSC y SGCSandy Carolina Alarcon SaenzPas encore d'évaluation
- Recurso SueloDocument6 pagesRecurso SueloOscar Giancarlo Calle TerronesPas encore d'évaluation
- AP7-AA4-Ev1-Desarrollo de Aplicaciones Windows Con C# y Visual StudioDocument11 pagesAP7-AA4-Ev1-Desarrollo de Aplicaciones Windows Con C# y Visual Studiocall center ventas y serviciosPas encore d'évaluation
- Central Hidroelectrica InambariDocument2 pagesCentral Hidroelectrica InambariSergio Garcia AlfaroPas encore d'évaluation
- Diagramas ASMDocument9 pagesDiagramas ASMLenin MedinaPas encore d'évaluation
- M Electronica Analogica 2018-1 PDFDocument32 pagesM Electronica Analogica 2018-1 PDFRaúl Pale SuarezPas encore d'évaluation
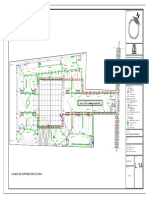
- Planos Hidrosanitarios DANIEL TORRESDocument3 pagesPlanos Hidrosanitarios DANIEL TORRESMartinTorresPas encore d'évaluation
- SQL GobiernoDocument10 pagesSQL GobiernoJessica Hernandez JimenezPas encore d'évaluation
- Certificación Una Herramienta para La Confiabilidad de La Construcción en AceroDocument8 pagesCertificación Una Herramienta para La Confiabilidad de La Construcción en AceroJorge perezPas encore d'évaluation
- Manual Stilll ms82Document96 pagesManual Stilll ms82juan camilo acosta neiraPas encore d'évaluation
- Jerry Uriarte - Curso de DJ Amateur - Parte 4 La Mezcla ArmónicaDocument7 pagesJerry Uriarte - Curso de DJ Amateur - Parte 4 La Mezcla Armónicaargus_panoptesPas encore d'évaluation
- Proyecto de Aplicación Lista de ChequeoDocument2 pagesProyecto de Aplicación Lista de ChequeobpinzonbPas encore d'évaluation
- Resumen de Análisis de Fallas EstructuralesDocument25 pagesResumen de Análisis de Fallas Estructuralesjimmyxd09Pas encore d'évaluation
- Lead Compliance Manager Iso19600Document13 pagesLead Compliance Manager Iso19600Miller Alexis Romero CardenasPas encore d'évaluation