Vous aimerez peut-être aussi
- Possible Ways To Add Resonant Components To The PWM Switch Cell: Classification of Resonant-Switch ConvertersDocument11 pagesPossible Ways To Add Resonant Components To The PWM Switch Cell: Classification of Resonant-Switch ConvertersdjyPas encore d'évaluation
- Important Performance Parameters for InvertersDocument30 pagesImportant Performance Parameters for InvertersdafPas encore d'évaluation
- DC-AC Conversion - Lecture 10, 11 and 12Document45 pagesDC-AC Conversion - Lecture 10, 11 and 12madiha100% (1)
- Analog Electronics Lecture-27-21032024 (2)Document24 pagesAnalog Electronics Lecture-27-21032024 (2)Sayam SanchetiPas encore d'évaluation
- 2016 Ch4-DelayDocument31 pages2016 Ch4-Delayជើងកាង ភូមិPas encore d'évaluation
- DC to AC Converter (Inverter) FundamentalsDocument15 pagesDC to AC Converter (Inverter) FundamentalsmadihaPas encore d'évaluation
- mt1 Sol PDFDocument18 pagesmt1 Sol PDFBenjamin CowenPas encore d'évaluation
- Electric Network Transfer FunctionsDocument43 pagesElectric Network Transfer FunctionsJoshua Roberto Gruta100% (1)
- Single-Phase Half-Wave Rectifier Performance ParametersDocument33 pagesSingle-Phase Half-Wave Rectifier Performance ParametersMohsin ALi SoOmroPas encore d'évaluation
- L33 ECEN5817 Out1Document14 pagesL33 ECEN5817 Out1djyPas encore d'évaluation
- P2213 Final S23 Formula SheetDocument3 pagesP2213 Final S23 Formula Sheethi hiPas encore d'évaluation
- ESC201T L11 RLC CircuitsDocument31 pagesESC201T L11 RLC CircuitsRachit MahajanPas encore d'évaluation
- Topic 3 - Ac ConverterDocument53 pagesTopic 3 - Ac ConverterUsher Boy Blue WhitePas encore d'évaluation
- Power Electronics PPT by DeveshDocument34 pagesPower Electronics PPT by Deveshshadan alamPas encore d'évaluation
- Ring OscillatorDocument13 pagesRing OscillatorAnonymous eWMnRr70qPas encore d'évaluation
- Final Power Electronics Formulas ListDocument8 pagesFinal Power Electronics Formulas ListJuan RaoofPas encore d'évaluation
- BEE4223 Power Electronics & Drives SystemsDocument40 pagesBEE4223 Power Electronics & Drives Systemsmalathynarayani100% (1)
- Single Phase Inverter 1Document9 pagesSingle Phase Inverter 1Zakaria ElbarbaryPas encore d'évaluation
- 03 Diode RectifiersDocument46 pages03 Diode RectifiersAsad AzharPas encore d'évaluation
- Diode Rectifier-1 PDFDocument46 pagesDiode Rectifier-1 PDFHamza ZaidPas encore d'évaluation
- Inverters: ContentDocument35 pagesInverters: ContentRenzoRiveroPas encore d'évaluation
- Chapter 5 DC To DC Converters: OutlineDocument25 pagesChapter 5 DC To DC Converters: OutlinemadihaPas encore d'évaluation
- ESC201T L14 Phasor AnalysisDocument23 pagesESC201T L14 Phasor AnalysisRachit MahajanPas encore d'évaluation
- Chp11-AC Power AnalysisDocument25 pagesChp11-AC Power Analysisavishek aviPas encore d'évaluation
- 7._Power_SuppliesDocument29 pages7._Power_SuppliesMeral MeralPas encore d'évaluation
- Single Phase Half Bridge InverterDocument29 pagesSingle Phase Half Bridge InverterGnanaseharan Arunachalam100% (1)
- Filter Presentation L, LC, CDocument10 pagesFilter Presentation L, LC, CrajasekharsrkrPas encore d'évaluation
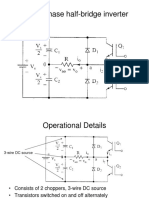
- Single-phase half-bridge inverter operational details and analysisDocument31 pagesSingle-phase half-bridge inverter operational details and analysistintuvrPas encore d'évaluation
- Part II - Lecture 5: Expansion Waves (Prandtl-Meyer Flow)Document8 pagesPart II - Lecture 5: Expansion Waves (Prandtl-Meyer Flow)Watcharakorn Viva la VidaPas encore d'évaluation
- DC To AC Conversion (Inverter) : - General Concept - Single-Phase Inverter - Harmonics - Modulation - Three-Phase InverterDocument46 pagesDC To AC Conversion (Inverter) : - General Concept - Single-Phase Inverter - Harmonics - Modulation - Three-Phase Inverterhdrzaman9439Pas encore d'évaluation
- Experiment No. 1Document53 pagesExperiment No. 1Sumer SainiPas encore d'évaluation
- CH 2 - Uncontrolled Rectifiers (Autosaved)Document92 pagesCH 2 - Uncontrolled Rectifiers (Autosaved)Gebremichael Teklay GebretsadikPas encore d'évaluation
- VNMU-HCMUT Multiuser Detection Schemes for MTC-MC-CDMADocument14 pagesVNMU-HCMUT Multiuser Detection Schemes for MTC-MC-CDMAPham Duy ThongPas encore d'évaluation
- محاضرة الاسبوع الاولDocument7 pagesمحاضرة الاسبوع الاولMohammad alhaboob2030Pas encore d'évaluation
- Steady-State Equivalent Circuit Modeling, Losses, and EfficiencyDocument128 pagesSteady-State Equivalent Circuit Modeling, Losses, and Efficiencyselaroth168Pas encore d'évaluation
- R. W. Erickson: Department of Electrical, Computer, and Energy Engineering University of Colorado, BoulderDocument37 pagesR. W. Erickson: Department of Electrical, Computer, and Energy Engineering University of Colorado, BoulderVijay Kumar LoluguPas encore d'évaluation
- RectifierDocument57 pagesRectifierThakur YogendraPas encore d'évaluation
- Fast Fourier Transform Cont... 2Document37 pagesFast Fourier Transform Cont... 2Arijeet SinghPas encore d'évaluation
- Switched Capacitor DC-DC Converters: Topologies and ApplicationsDocument25 pagesSwitched Capacitor DC-DC Converters: Topologies and Applicationssaigautham123Pas encore d'évaluation
- Powersys 4Document39 pagesPowersys 4setsindia3735Pas encore d'évaluation
- EeeDocument43 pagesEeeFemi PrincePas encore d'évaluation
- Powersys 3Document39 pagesPowersys 3setsindia3735Pas encore d'évaluation
- Esc201t l10 RC RL CircuitsDocument34 pagesEsc201t l10 RC RL CircuitsRachit MahajanPas encore d'évaluation
- Power Consumption in CMOS CircuitsDocument33 pagesPower Consumption in CMOS CircuitsGagandeep Singh DhingraPas encore d'évaluation
- Special Topics in Power - 1Document38 pagesSpecial Topics in Power - 1Ravichandran SekarPas encore d'évaluation
- Inverters: DR John FletcherDocument19 pagesInverters: DR John FletcherKRISHNA PRASADPas encore d'évaluation
- Lecture 1Document17 pagesLecture 1amrsalah40820Pas encore d'évaluation
- Power Electronics Rectifier FundamentalsDocument59 pagesPower Electronics Rectifier FundamentalsTàu NguyễnPas encore d'évaluation
- DC-DC Converters: Step-Down Operation and ModesDocument20 pagesDC-DC Converters: Step-Down Operation and Modesحسن علي جاسمPas encore d'évaluation
- Introduction To Seismic MigrationDocument39 pagesIntroduction To Seismic MigrationSt Komala Dewi Awz100% (2)
- Ch4 DC Switching Power Supply 2023-11-04Document40 pagesCh4 DC Switching Power Supply 2023-11-04hsiaopeihsuanPas encore d'évaluation
- List of Formula - Eet505Document2 pagesList of Formula - Eet505LIEW HUI FANG UNIMAPPas encore d'évaluation
- PWM Control for Single-Phase DC-AC ConvertersDocument14 pagesPWM Control for Single-Phase DC-AC ConvertersAftab AhmedPas encore d'évaluation
- Power Electronics Diode Rectifier GuideDocument46 pagesPower Electronics Diode Rectifier GuideAijaz HussainPas encore d'évaluation
- Elektronika Daya Dan PenerapannyaDocument30 pagesElektronika Daya Dan PenerapannyaMuhammad AfdalPas encore d'évaluation
- Ch05 PowerDocument50 pagesCh05 PowerĐạt Nguyễn ThànhPas encore d'évaluation
- Diode, Transistor & Fet Circuits Manual: Newnes Circuits Manual SeriesD'EverandDiode, Transistor & Fet Circuits Manual: Newnes Circuits Manual SeriesÉvaluation : 4.5 sur 5 étoiles4.5/5 (7)
- Newnes Electronics Engineers Pocket BookD'EverandNewnes Electronics Engineers Pocket BookÉvaluation : 4.5 sur 5 étoiles4.5/5 (4)
- Solution Manual for an Introduction to Equilibrium ThermodynamicsD'EverandSolution Manual for an Introduction to Equilibrium ThermodynamicsPas encore d'évaluation
- 7 ProblemsDocument18 pages7 ProblemsrajapeeePas encore d'évaluation
- 4 Chopper-Q1 - Q2-Controlled DC DrivesDocument25 pages4 Chopper-Q1 - Q2-Controlled DC DrivesrajapeeePas encore d'évaluation
- 2 Controlled Rectifier DC DrivesDocument25 pages2 Controlled Rectifier DC DrivesrajapeeePas encore d'évaluation
- 5 Chopper - 2Q - 4Q-Controlled DC DrivesDocument17 pages5 Chopper - 2Q - 4Q-Controlled DC DrivesrajapeeePas encore d'évaluation
- 5 Chopper - 2Q - 4Q-Controlled DC DrivesDocument17 pages5 Chopper - 2Q - 4Q-Controlled DC DrivesrajapeeePas encore d'évaluation
- 4 Chopper-Q1 - Q2-Controlled DC DrivesDocument25 pages4 Chopper-Q1 - Q2-Controlled DC DrivesrajapeeePas encore d'évaluation
- 6 Braking TypesDocument37 pages6 Braking TypesrajapeeePas encore d'évaluation
- 3 Controlled Rectifier DC DrivesDocument23 pages3 Controlled Rectifier DC DrivesrajapeeePas encore d'évaluation
- 1 DC Motors and ConvertersDocument42 pages1 DC Motors and Convertersrajapeee100% (1)
- 3 Controlled Rectifier DC DrivesDocument23 pages3 Controlled Rectifier DC DrivesrajapeeePas encore d'évaluation
- 1 DC Motors and ConvertersDocument42 pages1 DC Motors and ConvertersrajapeeePas encore d'évaluation
- 2 Controlled Rectifier DC DrivesDocument25 pages2 Controlled Rectifier DC DrivesrajapeeePas encore d'évaluation
- Power Electronics and Drive 01Document88 pagesPower Electronics and Drive 01rajapeeePas encore d'évaluation
- Power Electronics and Drive 01Document88 pagesPower Electronics and Drive 01rajapeeePas encore d'évaluation
- Current LA55Document3 pagesCurrent LA55rajapeeePas encore d'évaluation
- SMVEC ANALOG & DIGITAL ELECTRONICS QUIZDocument63 pagesSMVEC ANALOG & DIGITAL ELECTRONICS QUIZrajapeeePas encore d'évaluation
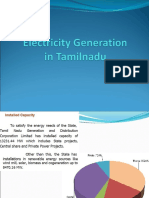
- Tamilnadu Power GenerationDocument25 pagesTamilnadu Power GenerationrajapeeePas encore d'évaluation
- Solar Energy ApplicationDocument20 pagesSolar Energy ApplicationrajapeeePas encore d'évaluation
- Overall DimensionsDocument16 pagesOverall DimensionsrajapeeePas encore d'évaluation
- Service Guide SpecificationDocument30 pagesService Guide SpecificationLuiz Roberto Honório Alves FilhoPas encore d'évaluation
- Diagnostic Code List: Cerrar SISDocument3 pagesDiagnostic Code List: Cerrar SISHamilton MirandaPas encore d'évaluation
- Manual MPS-PA Compact Workstation enDocument72 pagesManual MPS-PA Compact Workstation enospidera100% (1)
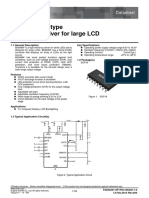
- Datasheet PDFDocument37 pagesDatasheet PDFRóbert MagosiPas encore d'évaluation
- Transmitter Waveform Generation Power Amplifier: PropagationDocument13 pagesTransmitter Waveform Generation Power Amplifier: Propagationdeependra sharmaPas encore d'évaluation
- Nidec Motor Corporation: FeaturesDocument12 pagesNidec Motor Corporation: FeaturesEduardo Miño BustamantePas encore d'évaluation
- BeagleBone Black Interfacing Hardware and Software - Yury MagdaDocument226 pagesBeagleBone Black Interfacing Hardware and Software - Yury MagdaAbdul Basit100% (5)
- SSC-32 Ver 2.0: Manual Written For Firmware Version SSC32-1.06XE Range Is 0.50mS To 2.50mSDocument15 pagesSSC-32 Ver 2.0: Manual Written For Firmware Version SSC32-1.06XE Range Is 0.50mS To 2.50mSSergio Juan100% (1)
- DS KA5x03xx-Series Fairchild Power SwitchDocument15 pagesDS KA5x03xx-Series Fairchild Power SwitchRubén Pérez ArmasPas encore d'évaluation
- Regular Sampled PWMDocument11 pagesRegular Sampled PWMg.jayakrishnaPas encore d'évaluation
- AERSEN, Manual IHM InglêsDocument33 pagesAERSEN, Manual IHM Inglêswagner machado de moraes100% (1)
- 74 HC 4538Document11 pages74 HC 4538vagitusPas encore d'évaluation
- PT Tech InfoDocument46 pagesPT Tech InfoJd AllenPas encore d'évaluation
- Es SyllabusDocument56 pagesEs SyllabusmanoshamnairPas encore d'évaluation
- Embedded Systems Design: A Unified Hardware/Software IntroductionDocument22 pagesEmbedded Systems Design: A Unified Hardware/Software IntroductionRoland SalloumPas encore d'évaluation
- Inverter Based DGDocument6 pagesInverter Based DGhassanPas encore d'évaluation
- Line Tracking Robot Using Infrared Cells for Lane Keeping and Obstacle AvoidanceDocument45 pagesLine Tracking Robot Using Infrared Cells for Lane Keeping and Obstacle Avoidanceminaadly100% (1)
- Manual Railduino v1.3 Update 14112016 enDocument23 pagesManual Railduino v1.3 Update 14112016 enAngelo DottorePas encore d'évaluation
- Projects Based On Audino DC Motor ControlDocument15 pagesProjects Based On Audino DC Motor Controlnagasaikiran ponnapalli0% (1)
- SVM V140SDocument37 pagesSVM V140SZack “Archimede38” BenPas encore d'évaluation
- ZF Cruisecommand User ManualDocument240 pagesZF Cruisecommand User ManualSoesanto Tirtoprodjo100% (2)
- Data Sheet: HEDM-55xx/560x & HEDS-55xx/56xxDocument13 pagesData Sheet: HEDM-55xx/560x & HEDS-55xx/56xxLuiguiPas encore d'évaluation
- Intro To ArduinoDocument38 pagesIntro To ArduinoANTONIO MIGUEL DAYNOPas encore d'évaluation
- Controlling Duct Pressure with UCM-420ADocument2 pagesControlling Duct Pressure with UCM-420AKumudu PereraPas encore d'évaluation
- Generation of PWM Using Verilog in FPGA: March 2016Document6 pagesGeneration of PWM Using Verilog in FPGA: March 2016BOOPATHI YADAVPas encore d'évaluation
- (Dust Suppression SystemDocument4 pages(Dust Suppression SystemJhonny ManjarrezPas encore d'évaluation
- DC Motor Speed Control Using Arduino & PWM With Program and CircuitDocument11 pagesDC Motor Speed Control Using Arduino & PWM With Program and CircuitMuhamad SyukronPas encore d'évaluation
- JDY DatasheetDocument41 pagesJDY DatasheetNikolas AugustoPas encore d'évaluation
- Tas 5548Document116 pagesTas 5548TecnoFixer Servicio TecnicoPas encore d'évaluation