Vous aimerez peut-être aussi
- Algebra de MatricesDocument64 pagesAlgebra de MatricesMoises JaberPas encore d'évaluation
- Álgebra de Matrices - Mario Rául Azocar (UCDC) - PDFDocument136 pagesÁlgebra de Matrices - Mario Rául Azocar (UCDC) - PDFMoises JaberPas encore d'évaluation
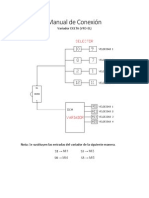
- Conexión Variador DELTA VFD-EL ManualDocument1 pageConexión Variador DELTA VFD-EL ManualMoises JaberPas encore d'évaluation
- Okuma Manuals 339Document107 pagesOkuma Manuals 339GaoQiangPas encore d'évaluation
- Sobrecarga de Operadores C++Document5 pagesSobrecarga de Operadores C++Moises JaberPas encore d'évaluation
- Manual de SurfcamDocument18 pagesManual de SurfcamChristian Rodriguez100% (2)
- Manual Batidoras12Document23 pagesManual Batidoras12Moises JaberPas encore d'évaluation
- Opt Guia1Document58 pagesOpt Guia1CasiQueNoPas encore d'évaluation
- VarillaDa42 Acero y AlambronDocument4 pagesVarillaDa42 Acero y AlambronPolarizados CentPas encore d'évaluation
- Manual KUKADocument17 pagesManual KUKAmanolitometPas encore d'évaluation
- Manual de SurfcamDocument18 pagesManual de SurfcamChristian Rodriguez100% (2)
- Diseño de roscas: guía completaDocument20 pagesDiseño de roscas: guía completajkvgPas encore d'évaluation
- P XIDocument16 pagesP XIMoises JaberPas encore d'évaluation
- Guía para La Elaboración Del Protocolo de TesisDocument4 pagesGuía para La Elaboración Del Protocolo de TesisMoises JaberPas encore d'évaluation
- 6 Numeros RacionalesDocument91 pages6 Numeros RacionalesMoises JaberPas encore d'évaluation
- Lab ViewDocument0 pageLab ViewJorge Alberto Castaño OrtegaPas encore d'évaluation
- Proceso Esbelto y La Metodología de Las 5Document14 pagesProceso Esbelto y La Metodología de Las 5Moises JaberPas encore d'évaluation
- Proceso Esbelto, Reingenieria y La Metodologia de Las 5 SDocument31 pagesProceso Esbelto, Reingenieria y La Metodologia de Las 5 SAlberto Carranza100% (3)
- Manual de Practicas Sistemas de RadiofrecuenciaDocument22 pagesManual de Practicas Sistemas de RadiofrecuenciaMoises JaberPas encore d'évaluation
- Manual de Practicas Sensores e InstrumentacionDocument15 pagesManual de Practicas Sensores e InstrumentacionMoises JaberPas encore d'évaluation
- Cosmología Presentación FINALDocument86 pagesCosmología Presentación FINALdhurdanPas encore d'évaluation
- 002 - Libro - Campo Eléctrico - para Imprimir 2023Document23 pages002 - Libro - Campo Eléctrico - para Imprimir 2023Malena StefoniPas encore d'évaluation
- Cálculo 3: SESIÓN 13: Integrales Triples en Coordenadas Cilíndricas y EsféricasDocument15 pagesCálculo 3: SESIÓN 13: Integrales Triples en Coordenadas Cilíndricas y EsféricasNéstor Villegas Alarcon100% (1)
- Guía de Aprendizaje de Transformaciones Isométricas. Octavo BásicoDocument7 pagesGuía de Aprendizaje de Transformaciones Isométricas. Octavo BásicoOlga Cecilia Huanca DelgadoPas encore d'évaluation
- Prueba Modelos Atómicos de La MateriaDocument3 pagesPrueba Modelos Atómicos de La MateriaMary Cruz Jurado BenavidesPas encore d'évaluation
- Qiskit Hands-OnDocument20 pagesQiskit Hands-Onisbro1788Pas encore d'évaluation
- Matemática Aplicada a la Ingeniería QuímicaDocument7 pagesMatemática Aplicada a la Ingeniería QuímicaDai RojasPas encore d'évaluation
- Silabo Matematica III UNNSDocument4 pagesSilabo Matematica III UNNSJeferson RiveraPas encore d'évaluation
- Relatividad (Lorenzo de La Torre) PDFDocument391 pagesRelatividad (Lorenzo de La Torre) PDFrikabe70Pas encore d'évaluation
- Tarea 3 Vectores en El EspacioDocument2 pagesTarea 3 Vectores en El EspacioDaniel PeraltaPas encore d'évaluation
- Mathway - Solucionador de Problemas de Matemáticas PDFDocument3 pagesMathway - Solucionador de Problemas de Matemáticas PDFRodriguez PoolPas encore d'évaluation
- Agujero de GusanoDocument14 pagesAgujero de GusanoOscar OchoaPas encore d'évaluation
- Integrales 4Document8 pagesIntegrales 4Adriano PradaPas encore d'évaluation
- Clase 07 - BUSCARV y BUSCARHDocument112 pagesClase 07 - BUSCARV y BUSCARHJULIAN ANDRES NAVIA SANTACRUZPas encore d'évaluation
- Artículo Sobre TaquionesDocument1 pageArtículo Sobre TaquionesLuis MnTsPas encore d'évaluation
- Toc 4028 02 02 PDFDocument30 pagesToc 4028 02 02 PDFjose100% (1)
- TAREA 2 Gemotria 2Document7 pagesTAREA 2 Gemotria 2Henrry Sena100% (1)
- Gradient eDocument35 pagesGradient eEstefany GomezPas encore d'évaluation
- Repaso de Derivadas e IntegralesDocument12 pagesRepaso de Derivadas e IntegralesYesid CardenasPas encore d'évaluation
- Funciones Vectoriales de Varias VariablesDocument30 pagesFunciones Vectoriales de Varias VariablesRenzo Tuyo100% (1)
- Guía 10 - MagnetismoDocument17 pagesGuía 10 - MagnetismoJ . Arturo Corrales HernándezPas encore d'évaluation
- Mecánica Cuántica y Álgebra de OperadoresDocument62 pagesMecánica Cuántica y Álgebra de OperadoresOlaf Durán100% (1)
- Examen Métodos Matemáticos IDocument5 pagesExamen Métodos Matemáticos ISanPas encore d'évaluation
- Elemento Diferencial de LongitudDocument2 pagesElemento Diferencial de LongitudPaolaSabogalCdlm0% (1)
- Taller 3-Distribucion Doblemente Acotado-HchavesDocument14 pagesTaller 3-Distribucion Doblemente Acotado-HchavesHarold Chaves MartínezPas encore d'évaluation
- Jacobiano de Una Transformacion UNA-PUNODocument8 pagesJacobiano de Una Transformacion UNA-PUNORomel Quispe100% (1)
- Mecánica cuántica y estructura electrónicaDocument7 pagesMecánica cuántica y estructura electrónicaFrancis FuentesPas encore d'évaluation
- Física CuánticaDocument10 pagesFísica CuánticagerPas encore d'évaluation
- Cálculo Vectorial: Derivada direccional, gradiente y aplicacionesDocument3 pagesCálculo Vectorial: Derivada direccional, gradiente y aplicacionesGuillermo Araya HuertaPas encore d'évaluation
- Vectores, Matrices Y DeterminantesDocument16 pagesVectores, Matrices Y DeterminantesDayan VillanuevaPas encore d'évaluation