Vous aimerez peut-être aussi
- ROBOTICS TITLEDocument10 pagesROBOTICS TITLEmaverickhydronPas encore d'évaluation
- Actuators & Sensors For Robot: DNT352 Industrial Robotics & AutomationDocument77 pagesActuators & Sensors For Robot: DNT352 Industrial Robotics & AutomationAzim UcinPas encore d'évaluation
- Lecture 2-HypermeshDocument37 pagesLecture 2-Hypermeshkashish4u100% (1)
- Control Strategy for Time-Delay Systems: Part I: Concepts and TheoriesD'EverandControl Strategy for Time-Delay Systems: Part I: Concepts and TheoriesMohammad-Hassan KhoobanÉvaluation : 4 sur 5 étoiles4/5 (1)
- Thermal Analysis of Friction Stir Welded Joint For 304l Stainless Steel Material Using Ansys Mechanical APDLDocument6 pagesThermal Analysis of Friction Stir Welded Joint For 304l Stainless Steel Material Using Ansys Mechanical APDLMichael SerraPas encore d'évaluation
- r05320305 Design of Machine Members IIDocument11 pagesr05320305 Design of Machine Members IISrinivasa Rao G100% (4)
- P6 Presentation-30-3-2021Document68 pagesP6 Presentation-30-3-2021Moiz MalikPas encore d'évaluation
- Lec02 ManipulatorsDocument7 pagesLec02 ManipulatorsMohamad YazidPas encore d'évaluation
- FFR125 LectureNotesDocument122 pagesFFR125 LectureNotesshivaprasadmvit100% (1)
- Inverse Kinematic Analysis of Robot ManipulatorsDocument336 pagesInverse Kinematic Analysis of Robot ManipulatorsDebabrata PaulPas encore d'évaluation
- MABE 012412 WebDocument4 pagesMABE 012412 WebAltairKoreaPas encore d'évaluation
- Quadruped Walking Running SimulationDocument49 pagesQuadruped Walking Running SimulationbilynbkPas encore d'évaluation
- 06 Question Bank MV 2018 Unit V Vibration Measurement PDFDocument1 page06 Question Bank MV 2018 Unit V Vibration Measurement PDFNABIL HUSSAINPas encore d'évaluation
- FEA Lab Manual PDFDocument49 pagesFEA Lab Manual PDFAdithya KashyapPas encore d'évaluation
- Dyna LookDocument19 pagesDyna LookGavriloae IonPas encore d'évaluation
- Gyroscopic Stabilization of Unstable VehiclesDocument27 pagesGyroscopic Stabilization of Unstable Vehiclesapi-438611633Pas encore d'évaluation
- Training Manual: I D I Ansys Introduction To ANSYSDocument6 pagesTraining Manual: I D I Ansys Introduction To ANSYSLUISALBERTO06011985Pas encore d'évaluation
- 090 Robot Trajectory Generation enDocument50 pages090 Robot Trajectory Generation enbaboiu electricPas encore d'évaluation
- AGV Bumper Test Method DevelopmentDocument20 pagesAGV Bumper Test Method DevelopmentManoj KumarPas encore d'évaluation
- Get Study Materials from Rejinpaul.comDocument91 pagesGet Study Materials from Rejinpaul.comkr_padmavathiPas encore d'évaluation
- Guide to Load Analysis for Durability in Vehicle EngineeringD'EverandGuide to Load Analysis for Durability in Vehicle EngineeringP. JohannessonÉvaluation : 4 sur 5 étoiles4/5 (1)
- Snake Robot ProjectDocument41 pagesSnake Robot ProjectNikhil SinghPas encore d'évaluation
- MSC Thesis Comparison and Analysis of Attitude Control Systems of A Satellite Using Reaction Wheel ActuatorsDocument117 pagesMSC Thesis Comparison and Analysis of Attitude Control Systems of A Satellite Using Reaction Wheel Actuatorsnab05Pas encore d'évaluation
- MechVibration Lec1 PDFDocument45 pagesMechVibration Lec1 PDFEngSafwanQadousPas encore d'évaluation
- Proceedings of the Metallurgical Society of the Canadian Institute of Mining and Metallurgy: Proceedings of the International Symposium on Fracture Mechanics, Winnipeg, Canada, August 23-26, 1987D'EverandProceedings of the Metallurgical Society of the Canadian Institute of Mining and Metallurgy: Proceedings of the International Symposium on Fracture Mechanics, Winnipeg, Canada, August 23-26, 1987W. R. TysonPas encore d'évaluation
- Design and Fabrication of 4 Straight Line MechanismsDocument34 pagesDesign and Fabrication of 4 Straight Line MechanismsArunkuma81Pas encore d'évaluation
- Fatigue Life Prediction of Lower Suspension Arm Using Strain-Life ApproachDocument15 pagesFatigue Life Prediction of Lower Suspension Arm Using Strain-Life Approachabraham silva hernandezPas encore d'évaluation
- Topology Optimization To Torque Arm in Landing Gear System Based On ANSYS WorkbenchDocument5 pagesTopology Optimization To Torque Arm in Landing Gear System Based On ANSYS WorkbenchAnnaPas encore d'évaluation
- Le Van Sy PHD Thesis PDFDocument205 pagesLe Van Sy PHD Thesis PDFNhan LePas encore d'évaluation
- A User-Material Subroutine Incorporating Single Crystal Plasticity in The Abaqus Finite Element ProgramDocument47 pagesA User-Material Subroutine Incorporating Single Crystal Plasticity in The Abaqus Finite Element ProgramangrycabbagePas encore d'évaluation
- Test SEM2 18-19 Questions PDFDocument2 pagesTest SEM2 18-19 Questions PDFAbdullah AlshihriPas encore d'évaluation
- Space Robotics: Seminar OnDocument30 pagesSpace Robotics: Seminar OnDhanish DhanishPas encore d'évaluation
- Vibration Midterm 2012Document2 pagesVibration Midterm 2012Aravind KumarPas encore d'évaluation
- Unit 4 CADDocument45 pagesUnit 4 CADiampiyushsahuPas encore d'évaluation
- Design and Analysis of Rack and Pinion Steering System ComponentsDocument22 pagesDesign and Analysis of Rack and Pinion Steering System ComponentsOmar MuñozPas encore d'évaluation
- Twist Beam DesignDocument38 pagesTwist Beam DesignSandeep KumarPas encore d'évaluation
- Parametric NURBS Curve Interpolators A ReviewDocument9 pagesParametric NURBS Curve Interpolators A ReviewSekar Mohan100% (1)
- BMMV3043 TutorialDocument4 pagesBMMV3043 TutorialKartik KrisnianPas encore d'évaluation
- Me III II DMM II LnotesDocument33 pagesMe III II DMM II LnotesChandu MallamPas encore d'évaluation
- Selvam College of Technology, Namakkal - 03 PH: 9942099122: 2 Marks Question & Answers Unit - I Basics of MechanismsDocument30 pagesSelvam College of Technology, Namakkal - 03 PH: 9942099122: 2 Marks Question & Answers Unit - I Basics of MechanismsVijayan GopalsamyPas encore d'évaluation
- ANSYS - Mech LND 17.0 M08 Transient AnalysisDocument55 pagesANSYS - Mech LND 17.0 M08 Transient AnalysisalmenferrerPas encore d'évaluation
- Flow Forming of Tubes-A ReviewDocument11 pagesFlow Forming of Tubes-A Reviewdr_kh_ahmedPas encore d'évaluation
- Hexply 8552 DatasheetDocument6 pagesHexply 8552 DatasheetMuhammad KhyzerPas encore d'évaluation
- SimMechanics Getting Started 2014bDocument40 pagesSimMechanics Getting Started 2014bengrasheedPas encore d'évaluation
- Project Report Hexapod RobotDocument3 pagesProject Report Hexapod RobotJunaid JahangirPas encore d'évaluation
- Wheel Leg 2011-224Document8 pagesWheel Leg 2011-224idorofte8235Pas encore d'évaluation
- Stepper Motor CatalogueDocument28 pagesStepper Motor CatalogueSuvek KumarPas encore d'évaluation
- Multibody System Simulation With SimmechanicsDocument24 pagesMultibody System Simulation With SimmechanicsSonny Jason APas encore d'évaluation
- Nx6 Goal Seek2Document19 pagesNx6 Goal Seek2MATHI KRISHNANPas encore d'évaluation
- ANSYS DesignXplorerDocument4 pagesANSYS DesignXplorerVasundhara Kumari PeddintiPas encore d'évaluation
- Computational method for designing wind turbine bladesDocument5 pagesComputational method for designing wind turbine bladesMaurício SoaresPas encore d'évaluation
- Haacon 4202+4585 Gebruiksaanwijzing enDocument6 pagesHaacon 4202+4585 Gebruiksaanwijzing enBasvanLeeuwen100% (2)
- Stabilization Methods for Simulations of Constrained Multibody DynamicsDocument179 pagesStabilization Methods for Simulations of Constrained Multibody DynamicsMinseong Kim100% (1)
- Force-torque sensor integration for industrial robot controlDocument6 pagesForce-torque sensor integration for industrial robot controlMarek VagašPas encore d'évaluation
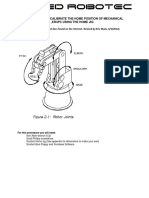
- ADJUST AND CALIBRATE HOME POSITION OF MECHANICAL ARMSDocument15 pagesADJUST AND CALIBRATE HOME POSITION OF MECHANICAL ARMSpauloPas encore d'évaluation
- Ansys Software Question Bank For Baja 2014: SL No. Questions AnswersDocument2 pagesAnsys Software Question Bank For Baja 2014: SL No. Questions AnswerspriyeshdongrePas encore d'évaluation
- 9A03502 Dynamics of MachineryDocument4 pages9A03502 Dynamics of MachinerysivabharathamurthyPas encore d'évaluation
- Design of a Multi-Fingered Gripper for Irregular ObjectsDocument8 pagesDesign of a Multi-Fingered Gripper for Irregular Objectsengr_faheemPas encore d'évaluation
- Report Card 2ADocument3 pagesReport Card 2Ayash523Pas encore d'évaluation
- COVID-19 Tracker - IndiaDocument3 pagesCOVID-19 Tracker - Indiayash523Pas encore d'évaluation
- Std. 5 MAths SA1Document3 pagesStd. 5 MAths SA1yash523Pas encore d'évaluation
- Std. 4 MAths SA1Document3 pagesStd. 4 MAths SA1yash523Pas encore d'évaluation
- All India Council For Technical EducationDocument1 pageAll India Council For Technical Educationyash523Pas encore d'évaluation
- A.D. Patel Institute of Technology - A CVM University affiliated instituteDocument2 pagesA.D. Patel Institute of Technology - A CVM University affiliated instituteyash523Pas encore d'évaluation
- List of Materials For Cluster 4 ESII CELLDocument2 pagesList of Materials For Cluster 4 ESII CELLyash523Pas encore d'évaluation
- Section A Derivatives and ContinuityDocument5 pagesSection A Derivatives and Continuityyash523Pas encore d'évaluation
- Admission Committee For Professional Courses, Ahmedabad Admission Year 2021-22 PCM/PCB Marks Versus Percentile of CBSEDocument4 pagesAdmission Committee For Professional Courses, Ahmedabad Admission Year 2021-22 PCM/PCB Marks Versus Percentile of CBSEyash523Pas encore d'évaluation
- A.D. Patel Institute of Technology - A CVM University affiliated instituteDocument2 pagesA.D. Patel Institute of Technology - A CVM University affiliated instituteyash523Pas encore d'évaluation
- NBA Documents: Mechanical Engineering DepartmentDocument1 pageNBA Documents: Mechanical Engineering Departmentyash523Pas encore d'évaluation
- CVM University Annual Appraisal ReportDocument1 pageCVM University Annual Appraisal Reportyash523Pas encore d'évaluation
- A. D. Patel Institute of Technology, New V. V. Nagar: VisionDocument8 pagesA. D. Patel Institute of Technology, New V. V. Nagar: Visionyash523Pas encore d'évaluation
- A.D. Patel Institute of Technology - A CVM University affiliated instituteDocument2 pagesA.D. Patel Institute of Technology - A CVM University affiliated instituteyash523Pas encore d'évaluation
- Belt Conveyor SystemDocument26 pagesBelt Conveyor SystemHermawan LesmanaPas encore d'évaluation
- LeaderShip TalkDocument1 pageLeaderShip Talkyash523Pas encore d'évaluation
- Fatigue Design of Process EquipmentDocument94 pagesFatigue Design of Process EquipmentGuillermo CorderoPas encore d'évaluation
- DH Parameters PDFDocument122 pagesDH Parameters PDFyash523Pas encore d'évaluation
- Me CVM Gaurav PurshkarDocument1 pageMe CVM Gaurav Purshkaryash523Pas encore d'évaluation
- AformnDocument4 pagesAformnyash523Pas encore d'évaluation
- AformnDocument4 pagesAformnyash523Pas encore d'évaluation
- Anysys Aicte PDFDocument1 pageAnysys Aicte PDFyash523Pas encore d'évaluation
- Compact 4-way pressure unloading valve with adjustable pressure differentialsDocument7 pagesCompact 4-way pressure unloading valve with adjustable pressure differentialsyash523Pas encore d'évaluation
- EC Charutar Vidya MandalDocument1 pageEC Charutar Vidya Mandalyash523Pas encore d'évaluation
- EE CVM SarthakDocument2 pagesEE CVM Sarthakyash523Pas encore d'évaluation
- EC Charutar Vidya MandalDocument1 pageEC Charutar Vidya Mandalyash523Pas encore d'évaluation
- Benefits To Faculty MembersDocument1 pageBenefits To Faculty Membersyash523Pas encore d'évaluation
- Automobile Engineering Student DetailsDocument10 pagesAutomobile Engineering Student Detailsyash523Pas encore d'évaluation
- RPTPDocument3 pagesRPTPyash523Pas encore d'évaluation
- Automobile Engineering Student DetailsDocument10 pagesAutomobile Engineering Student Detailsyash523Pas encore d'évaluation
- Liquid Air Energy Storage Systems A - 2021 - Renewable and Sustainable EnergyDocument12 pagesLiquid Air Energy Storage Systems A - 2021 - Renewable and Sustainable EnergyJosePPMolinaPas encore d'évaluation
- Messier 88Document3 pagesMessier 88Matheus RochaPas encore d'évaluation
- Nurses Week Program InvitationDocument2 pagesNurses Week Program InvitationBenilda TuanoPas encore d'évaluation
- Health Benefits of Kidney BeansDocument17 pagesHealth Benefits of Kidney BeansShyneAneeshPas encore d'évaluation
- Chapter 1-The Indian Contract Act, 1872, Unit 1-Nature of ContractsDocument10 pagesChapter 1-The Indian Contract Act, 1872, Unit 1-Nature of ContractsALANKRIT TRIPATHIPas encore d'évaluation
- Ezequiel Reyes CV EngDocument1 pageEzequiel Reyes CV Engezequiel.rdPas encore d'évaluation
- Ti 1000 0200 - enDocument2 pagesTi 1000 0200 - enJamil AhmedPas encore d'évaluation
- Report Vortex TubeDocument68 pagesReport Vortex TubePravinSharmaPas encore d'évaluation
- VIACRYL VSC 6250w/65MP: Technical DatasheetDocument2 pagesVIACRYL VSC 6250w/65MP: Technical DatasheetPratik MehtaPas encore d'évaluation
- The Teacher and The LearnerDocument23 pagesThe Teacher and The LearnerUnique Alegarbes Labra-SajolPas encore d'évaluation
- Radial Drill Catalog-110620Document14 pagesRadial Drill Catalog-110620Anto SiminPas encore d'évaluation
- DX DiagDocument42 pagesDX DiagVinvin PatrimonioPas encore d'évaluation
- Scope of Incubator CentersDocument3 pagesScope of Incubator Centersanon_542600428Pas encore d'évaluation
- APA - 7thed - UCW Student Paper TemplateDocument4 pagesAPA - 7thed - UCW Student Paper Templatesimerpreet3Pas encore d'évaluation
- Atomic Structure - One Shot by Sakshi Mam #BounceBackDocument231 pagesAtomic Structure - One Shot by Sakshi Mam #BounceBackchansiray7870Pas encore d'évaluation
- Synetek Controls Inc.: Ds1-S: Installation InstructionsDocument2 pagesSynetek Controls Inc.: Ds1-S: Installation Instructionsdgd_electromecPas encore d'évaluation
- Plate Tectonics LessonDocument3 pagesPlate Tectonics LessonChristy P. Adalim100% (2)
- Newly Constructed Masculinity' in Mahesh Dattani's Dance Like A ManDocument4 pagesNewly Constructed Masculinity' in Mahesh Dattani's Dance Like A ManIJELS Research JournalPas encore d'évaluation
- GDcorrespondencecourselessons 165Document8 pagesGDcorrespondencecourselessons 165olly rathbonePas encore d'évaluation
- Thick Seam Mining Methods and Problems Associated With It: Submitted By: SAURABH SINGHDocument13 pagesThick Seam Mining Methods and Problems Associated With It: Submitted By: SAURABH SINGHPrabhu PrasadPas encore d'évaluation
- Case Study No. 11 - Hydroelectric Power Plant in The PhilippinesDocument26 pagesCase Study No. 11 - Hydroelectric Power Plant in The PhilippinespicefeatiPas encore d'évaluation
- X TensoqaDocument2 pagesX TensoqaLeo CabelosPas encore d'évaluation
- Salt Analysis-Ferric ChlorideDocument3 pagesSalt Analysis-Ferric ChlorideVandana0% (1)
- Restaurant Social Media GuideDocument30 pagesRestaurant Social Media GuideHoàng gia NghiêmPas encore d'évaluation
- Volume 4-6Document757 pagesVolume 4-6AKPas encore d'évaluation
- New Wordpad DocumentDocument6 pagesNew Wordpad DocumentJonelle D'melloPas encore d'évaluation
- Stress-Busting Plan for Life's ChallengesDocument3 pagesStress-Busting Plan for Life's Challengesliera sicadPas encore d'évaluation
- Modul English For Study SkillsDocument9 pagesModul English For Study SkillsRazan Nuhad Dzulfaqor razannuhad.2020Pas encore d'évaluation
- Geomatics Lab 6 (GPS)Document24 pagesGeomatics Lab 6 (GPS)nana100% (1)
- Participatory Assessment of Ragay Gulf Resources and SocioeconomicsDocument167 pagesParticipatory Assessment of Ragay Gulf Resources and SocioeconomicsCres Dan Jr. BangoyPas encore d'évaluation