Vous aimerez peut-être aussi
- Redes de Comunicacion AlvaradoDocument37 pagesRedes de Comunicacion AlvaradoALEX FABRICIO TOAQUIZA LOPEZ100% (1)
- Sistema Canbus y Buslin AutomotrizDocument7 pagesSistema Canbus y Buslin Automotrizjunior1986191699Pas encore d'évaluation
- INFORME Control Hidraulico PROAÑO KEVIN PDFDocument21 pagesINFORME Control Hidraulico PROAÑO KEVIN PDFKevin ProañoPas encore d'évaluation
- Calibracion Motor DieselDocument18 pagesCalibracion Motor Dieseledgar100% (2)
- Qué Es La ECUDocument6 pagesQué Es La ECUAbi BasualdoPas encore d'évaluation
- SensoresDocument15 pagesSensoresleo challapaPas encore d'évaluation
- Actuadores en El VehículoDocument16 pagesActuadores en El VehículoLucas GiaccagliaPas encore d'évaluation
- Calibrador PDFDocument11 pagesCalibrador PDFMichael WilsoPas encore d'évaluation
- Ficha Tecnica GNV Parte IvDocument4 pagesFicha Tecnica GNV Parte IvRodrigoPas encore d'évaluation
- Red CANDocument35 pagesRed CANskpppPas encore d'évaluation
- Motores Tarea 1 Distribucion ValvularDocument25 pagesMotores Tarea 1 Distribucion ValvularVladimir CarrilloPas encore d'évaluation
- Electrónica de ControlDocument29 pagesElectrónica de ControlBrayan Ruiz RubioPas encore d'évaluation
- Tipos de Inyeccion - Inyeccion Diesel e Iyeccion GasolinaDocument5 pagesTipos de Inyeccion - Inyeccion Diesel e Iyeccion GasolinaFernando ToscanoPas encore d'évaluation
- Comprobacion Del Estado Electronico de Los Sensores Del Sistema de InyeccionDocument29 pagesComprobacion Del Estado Electronico de Los Sensores Del Sistema de InyeccionJhonatan VilcaPas encore d'évaluation
- Informe Inyeccion ElectronicaDocument18 pagesInforme Inyeccion ElectronicafabinhobajPas encore d'évaluation
- Dirección Asistida Kia 1 y 2 PDFDocument22 pagesDirección Asistida Kia 1 y 2 PDFAnibal CampañaPas encore d'évaluation
- Electronica 2 ESIME EscanerDocument3 pagesElectronica 2 ESIME EscanerBetox DelgadoPas encore d'évaluation
- Interpretacion de Diagramas EléctricosDocument3 pagesInterpretacion de Diagramas EléctricosAlvaruAlomotoPas encore d'évaluation
- 5 Tecnicas para Un Diagnostico Electronico EfectivoDocument5 pages5 Tecnicas para Un Diagnostico Electronico EfectivoJose Armando Miranda VelascoPas encore d'évaluation
- Diapositiva de Motor Sistema de LubricacionDocument11 pagesDiapositiva de Motor Sistema de LubricacionKaren Sosa100% (1)
- MultiplexadoDocument27 pagesMultiplexadoJuan Francisco ChaconPas encore d'évaluation
- Motores Sistema de Inyección A Gasolina MEPDocument15 pagesMotores Sistema de Inyección A Gasolina MEPShermanPas encore d'évaluation
- Sistemas Del AutomovilDocument9 pagesSistemas Del AutomovilFreymanGabrielAcuñaGambasica100% (1)
- Guia 4 MantenimientoDocument21 pagesGuia 4 MantenimientosuperibanPas encore d'évaluation
- Control Adaptativo de Velocidad - ACCDocument3 pagesControl Adaptativo de Velocidad - ACCDani-meganeboyPas encore d'évaluation
- Sistema de TraccionDocument11 pagesSistema de TraccionAdiel Valencia Ramoz100% (1)
- Resumen Basico de Sensores y ActuadoresDocument10 pagesResumen Basico de Sensores y ActuadoresNachoPas encore d'évaluation
- El MultímetroDocument7 pagesEl MultímetroTalle Rafa MurilloPas encore d'évaluation
- Aplicaciones de Sistemas OleohidráulicosDocument26 pagesAplicaciones de Sistemas OleohidráulicossoniaPas encore d'évaluation
- Direccion 1Document76 pagesDireccion 1emilioC5Pas encore d'évaluation
- Guia Trabajo EsitronicDocument5 pagesGuia Trabajo EsitronicRamon AyalaPas encore d'évaluation
- Tips Mecanica. Conectores OBDDocument6 pagesTips Mecanica. Conectores OBDRuperto Vera MoralesPas encore d'évaluation
- Alternadores y Reguladores de TensionDocument40 pagesAlternadores y Reguladores de TensionLuigui Lopez LlancaPas encore d'évaluation
- Practica 2 Sensores y ActuadoresDocument9 pagesPractica 2 Sensores y ActuadoresLocote GomoraPas encore d'évaluation
- Equipos de Comprobacion Como Se Utiliza El ScannerDocument11 pagesEquipos de Comprobacion Como Se Utiliza El ScannerJose AvilaPas encore d'évaluation
- Sensores y Actuadores Del Motor A GasolinaDocument38 pagesSensores y Actuadores Del Motor A GasolinaDiego EspinozaPas encore d'évaluation
- Motor de Combustion Interna y Sus Sistemas PresentacionDocument34 pagesMotor de Combustion Interna y Sus Sistemas Presentacionoxonoer100% (1)
- Sistema de Enfriamiento MotocicletasDocument5 pagesSistema de Enfriamiento MotocicletasDirector TecnicoPas encore d'évaluation
- Sistema de Control de VelocidadDocument22 pagesSistema de Control de VelocidadRoberto Márquez ZamoraPas encore d'évaluation
- Tipos de EmbraguesDocument5 pagesTipos de EmbraguesJhon Silver FreirePas encore d'évaluation
- Sensores en El Automoviiiil PDFDocument9 pagesSensores en El Automoviiiil PDFAxel MedinaPas encore d'évaluation
- Sistema Transmicion HibridaDocument11 pagesSistema Transmicion HibridaDolores PaulPas encore d'évaluation
- Sensor de TorqueDocument3 pagesSensor de TorqueJuanPas encore d'évaluation
- INYECCIÓN ELECTRÓNICA GASOLINA (Autoguardado) (Autoguardado)Document24 pagesINYECCIÓN ELECTRÓNICA GASOLINA (Autoguardado) (Autoguardado)javier cartagenaPas encore d'évaluation
- MultiplexadoDocument69 pagesMultiplexadoLyla Albarado100% (1)
- Sistemas de Comb. Electrónicos U CalllaoDocument35 pagesSistemas de Comb. Electrónicos U CalllaoElthon Holivar Tamara Palacios100% (1)
- Diagrama de Bloques Unidad Electronica de MandoDocument2 pagesDiagrama de Bloques Unidad Electronica de MandoJhonnyTapia100% (2)
- ACTUADORESDocument7 pagesACTUADORESRafael H Juliao BolañoPas encore d'évaluation
- Tesis Sobre Diagnóstico de Fallas A Través de Códigos de Falla y EscanerDocument83 pagesTesis Sobre Diagnóstico de Fallas A Través de Códigos de Falla y Escanerz3xa5347100% (1)
- HONDA Guia Tecnica - Ilustrada - Del - Asesor PDFDocument35 pagesHONDA Guia Tecnica - Ilustrada - Del - Asesor PDFMichael Alejandro Guillen100% (1)
- Sensores y ActuadoresDocument36 pagesSensores y ActuadoresYonathan Rodriguez Subiabre100% (3)
- Inyección Central de Combustible (TBI)Document10 pagesInyección Central de Combustible (TBI)juan perezPas encore d'évaluation
- Diagrama de Circuito de Luces Del VehiculoDocument3 pagesDiagrama de Circuito de Luces Del VehiculoJhon Gonzls QlcPas encore d'évaluation
- Manual Sistema Aire Acondicionado Automatico Componentes FuncionamientoDocument8 pagesManual Sistema Aire Acondicionado Automatico Componentes FuncionamientoNicolas AlmarioPas encore d'évaluation
- Valvula Egr y CatalizadorDocument27 pagesValvula Egr y CatalizadorDENIS UGEÑOPas encore d'évaluation
- Iluminacion de Luces Hologenas Xenon y NeonDocument21 pagesIluminacion de Luces Hologenas Xenon y NeonMisty CastanedaPas encore d'évaluation
- Sistema de Suspension Tema 1Document46 pagesSistema de Suspension Tema 1cristhian gallardoPas encore d'évaluation
- Reporte de Practicás AcelerometroDocument3 pagesReporte de Practicás AcelerometroRaul Garcia AdamePas encore d'évaluation
- Can BusDocument9 pagesCan BusCesar PacoriPas encore d'évaluation
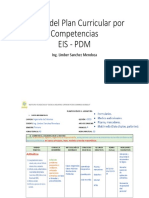
- Diseño Del Plan Curricular Por Competencias EISPDMDocument2 pagesDiseño Del Plan Curricular Por Competencias EISPDMAnonymous CgSaPUa8SPas encore d'évaluation
- 30prácticas de Electrónica Digital Con ProteusDocument55 pages30prácticas de Electrónica Digital Con ProteusAnonymous CgSaPUa8S0% (1)
- Manual Skp900Document25 pagesManual Skp900Acosta ManuelPas encore d'évaluation
- Curso TRANS&DIRECCION D8T PDFDocument46 pagesCurso TRANS&DIRECCION D8T PDFAnonymous CgSaPUa8S100% (1)
- Endo MarketingDocument22 pagesEndo MarketingTavio LunaPas encore d'évaluation
- Sindrome OdtDocument2 pagesSindrome OdtMelany ArellanoPas encore d'évaluation
- Discurso FinalDocument2 pagesDiscurso FinalAlberto CantilloPas encore d'évaluation
- Sindromes MieloproliferativosDocument50 pagesSindromes MieloproliferativosAlo Ely AlvarezPas encore d'évaluation
- Hume DalesDocument16 pagesHume DalestomasdelpinPas encore d'évaluation
- Huarte 71Document326 pagesHuarte 71huarte14Pas encore d'évaluation
- Sisat Tercer GradoDocument4 pagesSisat Tercer Gradoanayeli80% (5)
- Gestion de Operaciones Fase3 UnadDocument12 pagesGestion de Operaciones Fase3 Unadyazo yazhoPas encore d'évaluation
- Contabilidad VDocument406 pagesContabilidad Vmaria.mayerPas encore d'évaluation
- Diapositivas Descripción Del MovimientoDocument20 pagesDiapositivas Descripción Del MovimientoAmethyst SmithPas encore d'évaluation
- Tecnología Del Concreto Parte 1Document118 pagesTecnología Del Concreto Parte 1BrigittNicollSalinasPas encore d'évaluation
- Rúbrica Vasija Artes 3eroDocument1 pageRúbrica Vasija Artes 3eroGraciela CardenasPas encore d'évaluation
- Cuaderno de Informes 3Document13 pagesCuaderno de Informes 3Marilu Altuna PoloPas encore d'évaluation
- Resumen de Criticismo e IdealismoDocument3 pagesResumen de Criticismo e IdealismoJorge GuijonPas encore d'évaluation
- Operaciones Mineras A Tajo Abierto - Un Enfoque Experimentado PDFDocument53 pagesOperaciones Mineras A Tajo Abierto - Un Enfoque Experimentado PDFJampier joao Flores estradaPas encore d'évaluation
- Comprension de LecturaDocument2 pagesComprension de LecturaDiana CardenasPas encore d'évaluation
- Ensayo de ModernidadDocument4 pagesEnsayo de ModernidadRichard Mejia VelardePas encore d'évaluation
- El Periódico MuralDocument3 pagesEl Periódico Muralaxelfredy0% (1)
- GUIA FINAL DIRECCION EN FINANZAS (Autoguardado)Document13 pagesGUIA FINAL DIRECCION EN FINANZAS (Autoguardado)Karen BalmacedaPas encore d'évaluation
- Conceptos Basicos Actividad FísicaDocument5 pagesConceptos Basicos Actividad FísicaObitoHuchihaPas encore d'évaluation
- Definición de Método AnalíticoDocument18 pagesDefinición de Método AnalíticoLeonel Ramos MendozaPas encore d'évaluation
- Busquemos La Sabiduría Que Viene de DiosDocument4 pagesBusquemos La Sabiduría Que Viene de DiosAlberto ValdiviaPas encore d'évaluation
- Preguntas Fundamentales Filosofia PDFDocument9 pagesPreguntas Fundamentales Filosofia PDFClaudio Godoy100% (1)
- Propano Triol QuimicaDocument10 pagesPropano Triol QuimicaMonica PradoPas encore d'évaluation
- Janequeo Las Transformaciones Del PersonDocument18 pagesJanequeo Las Transformaciones Del PersonSNPas encore d'évaluation
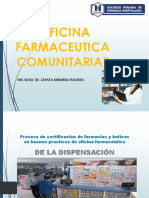
- Oficina FarmaceuticaDocument36 pagesOficina FarmaceuticaKatterinSuniValdiviaPas encore d'évaluation
- Oracion A Jesus SacramentadoDocument5 pagesOracion A Jesus SacramentadoRodrigo LopezPas encore d'évaluation
- Tema 19 Comportamiento de La Innovacion y La Rtoma de DesicionesDocument17 pagesTema 19 Comportamiento de La Innovacion y La Rtoma de DesicionesStefano GomezPas encore d'évaluation
- Tema 2 - Sistemas Numéricos Binario Octal HexadecimalDocument11 pagesTema 2 - Sistemas Numéricos Binario Octal HexadecimalAbdel Fedor Aliaga VillalobosPas encore d'évaluation
- Contrato de Obra Contratista Modificado Enero 2015 en Proceso de RevisionDocument12 pagesContrato de Obra Contratista Modificado Enero 2015 en Proceso de Revisionnathy ReyesPas encore d'évaluation