Vous aimerez peut-être aussi
- Tables of Coulomb Wave Functions: Whittaker FunctionsD'EverandTables of Coulomb Wave Functions: Whittaker FunctionsPas encore d'évaluation
- Lect 11 Hand OutDocument9 pagesLect 11 Hand OutMohammadreza HadipourPas encore d'évaluation
- Chapter 6 SRDocument137 pagesChapter 6 SRMadhusmita BarikPas encore d'évaluation
- Solving DEs with Laplace TransformsDocument19 pagesSolving DEs with Laplace TransformsPahala SamosirPas encore d'évaluation
- Regulation and Control: by Tewedage SileshiDocument12 pagesRegulation and Control: by Tewedage SileshihermelaPas encore d'évaluation
- State-Steady ErrorDocument6 pagesState-Steady ErrorHarrysPas encore d'évaluation
- 6.1 Introduction To Frequency ResponseDocument66 pages6.1 Introduction To Frequency ResponseNavendranPas encore d'évaluation
- AC Circuits IDocument38 pagesAC Circuits IKeithPas encore d'évaluation
- System Control System Control: 8. Control System Design by The Root-Locus MethodDocument29 pagesSystem Control System Control: 8. Control System Design by The Root-Locus MethodUM ZaidPas encore d'évaluation
- 351 - 27435 - EE419 - 2020 - 1 - 2 - 1 - 0 2 EE419 Lec2,3 Bode PlotDocument42 pages351 - 27435 - EE419 - 2020 - 1 - 2 - 1 - 0 2 EE419 Lec2,3 Bode Plotyoussef hossamPas encore d'évaluation
- Module 6Document34 pagesModule 6Debasis ChandraPas encore d'évaluation
- Bode Plot Bds 26 3 2015 PDFDocument148 pagesBode Plot Bds 26 3 2015 PDFNikhil PatwariPas encore d'évaluation
- Circuit Analysis Using Laplace TransformDocument41 pagesCircuit Analysis Using Laplace TransformhibaPas encore d'évaluation
- Zero Order HoldDocument19 pagesZero Order HoldSn ProfPas encore d'évaluation
- 02 - Mathematical ModellingDocument10 pages02 - Mathematical ModellingKenanSavaşMütefPas encore d'évaluation
- The system is stableDocument48 pagesThe system is stableJulcemar CapellaroPas encore d'évaluation
- Chapter 31ADocument43 pagesChapter 31AHafidz HmaPas encore d'évaluation
- Feedback Control Systems: Lecture Notes-12/12Document10 pagesFeedback Control Systems: Lecture Notes-12/12Aastha SinghPas encore d'évaluation
- KGH Xs GH KGH CE GH KGH: Mech / Elec Analogy Nyquist Criteria State - SpaceDocument1 pageKGH Xs GH KGH CE GH KGH: Mech / Elec Analogy Nyquist Criteria State - Spacejohn dongPas encore d'évaluation
- Frequency Response Analysis Bode PlotsDocument76 pagesFrequency Response Analysis Bode PlotsSudhanshu Singh0% (1)
- Modeling of Electrical SystemsDocument51 pagesModeling of Electrical SystemsCheems PandeyPas encore d'évaluation
- Control Strategy: Single Input and Single Output With Unit FeedbackDocument4 pagesControl Strategy: Single Input and Single Output With Unit FeedbackmulyanaPas encore d'évaluation
- Feedback CharacteristicsDocument17 pagesFeedback CharacteristicsRajendar PonagantiPas encore d'évaluation
- Outline: - Signal Flow Graph Notation. - Signal Flow Graph From Block Diagram. - Mason's Rule. - Transfer FunctionDocument5 pagesOutline: - Signal Flow Graph Notation. - Signal Flow Graph From Block Diagram. - Mason's Rule. - Transfer FunctionG MunhuPas encore d'évaluation
- Bode Plot - EC 502Document37 pagesBode Plot - EC 502ajay meena100% (2)
- Control - System - Chapter 6 - 8EDocument51 pagesControl - System - Chapter 6 - 8EE24089046林雯琪Pas encore d'évaluation
- Lecture 1 IIR Digital Filter Design DGDocument16 pagesLecture 1 IIR Digital Filter Design DGAlina RazaPas encore d'évaluation
- BCS - 4 - Reduction of Multiple SubsystemsDocument24 pagesBCS - 4 - Reduction of Multiple Subsystemsandik yuliantoPas encore d'évaluation
- Electric Circuits ECSE-2010 ECSE 2010: Today and Next ClassesDocument5 pagesElectric Circuits ECSE-2010 ECSE 2010: Today and Next Classeschristian9082Pas encore d'évaluation
- Frequency Response S-Domain Analysis Poles and ZerosDocument31 pagesFrequency Response S-Domain Analysis Poles and ZerosAhmad N Effendi KältePas encore d'évaluation
- Sensitivity of A Controlled System: S S G S K K S G L(S) GDocument3 pagesSensitivity of A Controlled System: S S G S K K S G L(S) GrosePas encore d'évaluation
- Fourier Series Signals and Systems TutorialDocument17 pagesFourier Series Signals and Systems TutorialHritvik GaindPas encore d'évaluation
- Linear Control Systems: Ali Karimpour Associate Professor Ferdowsi University of MashhadDocument33 pagesLinear Control Systems: Ali Karimpour Associate Professor Ferdowsi University of MashhadZain AslamPas encore d'évaluation
- Tutorial 11Document25 pagesTutorial 11Yang ElvisQUPas encore d'évaluation
- Bode PlotDocument38 pagesBode PlotjaganathapandianPas encore d'évaluation
- Time Domain Analysis of Control SystemsDocument25 pagesTime Domain Analysis of Control SystemsPavanPas encore d'évaluation
- New EM5Document35 pagesNew EM5Yash GuptaPas encore d'évaluation
- Univariate Time Series Models: Gianluca CubaddaDocument75 pagesUnivariate Time Series Models: Gianluca CubaddaAntonio VeronicoPas encore d'évaluation
- Yn Ayn Aynn BXN BXNN: Recursive FiltersDocument28 pagesYn Ayn Aynn BXN BXNN: Recursive FiltersHarreniPas encore d'évaluation
- Lecture 06 Pole - Zeros and Time Response of First and 2nd Order SystemsDocument30 pagesLecture 06 Pole - Zeros and Time Response of First and 2nd Order SystemsMuhammad Abdullah MeharPas encore d'évaluation
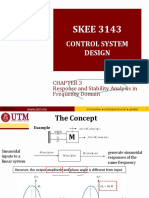
- Response and Stability Analysis in Frequency DomainDocument54 pagesResponse and Stability Analysis in Frequency DomainMYNAMEPas encore d'évaluation
- Yn Ayn Aynn BXN BXNN: Recursive FiltersDocument28 pagesYn Ayn Aynn BXN BXNN: Recursive FiltersNikita ShakyaPas encore d'évaluation
- Control Systems Theory: Sinusoidal Tools STB 35103Document42 pagesControl Systems Theory: Sinusoidal Tools STB 35103Akula VeerrajuPas encore d'évaluation
- 9 IirDocument28 pages9 IirMekonen AberaPas encore d'évaluation
- Lecture 20 Root Locus Introduction and DefinitionDocument21 pagesLecture 20 Root Locus Introduction and DefinitionHamza KhanPas encore d'évaluation
- Chapter 4 Time Response of Dynamic Systems 1Document86 pagesChapter 4 Time Response of Dynamic Systems 1Rakhmeen gulPas encore d'évaluation
- EE 401 Control Systems Analysis and Design: A Review of The Laplace TransformDocument18 pagesEE 401 Control Systems Analysis and Design: A Review of The Laplace TransformJoshua HernandezPas encore d'évaluation
- DSK - 4 - Reduction of Multiple SubsystemsDocument24 pagesDSK - 4 - Reduction of Multiple Subsystemsandik yuliantoPas encore d'évaluation
- Chapter 10-Frequency ResponseDocument67 pagesChapter 10-Frequency Responseعمر الفهدPas encore d'évaluation
- 117919Document38 pages117919saravanan.9344308178Pas encore d'évaluation
- Chapter 4.1 Response Ist Order SystemsDocument35 pagesChapter 4.1 Response Ist Order SystemsShah AdnanPas encore d'évaluation
- CH 1Document67 pagesCH 1Hazril MahmudPas encore d'évaluation
- MCH3008 Lecture Week 9Document48 pagesMCH3008 Lecture Week 9Çağla Sena UzunPas encore d'évaluation
- Transmission Line CharacteristicsDocument33 pagesTransmission Line Characteristics123 georgePas encore d'évaluation
- Adobe Scan 02 Dec 2023Document11 pagesAdobe Scan 02 Dec 2023sushil kumarPas encore d'évaluation
- Yn Ayn Ayn N BXN BXN N: Recursive FiltersDocument28 pagesYn Ayn Ayn N BXN BXN N: Recursive FiltersnikshithPas encore d'évaluation
- Control Theory: Germán Andrés Ramos, PHDDocument45 pagesControl Theory: Germán Andrés Ramos, PHDJuan David CarrilloPas encore d'évaluation
- C-Transient ResponseDocument17 pagesC-Transient ResponseAnanthan SrijithPas encore d'évaluation
- Course Project 2023-2024 Group 2Document8 pagesCourse Project 2023-2024 Group 2elkjgPas encore d'évaluation
- 3D Time Domain Panel Method: by Ranadev DattaDocument25 pages3D Time Domain Panel Method: by Ranadev DattaVictor DaggersPas encore d'évaluation
- Lec3 LcsDocument33 pagesLec3 LcsZain AslamPas encore d'évaluation
- Lec23 LcsDocument33 pagesLec23 LcsZain AslamPas encore d'évaluation
- TIME DOMAIN DESIGN OF CONTROL SYSTEMSDocument39 pagesTIME DOMAIN DESIGN OF CONTROL SYSTEMSZain AslamPas encore d'évaluation
- Linear Control Systems: Ali Karimpour Associate Professor Ferdowsi University of MashhadDocument30 pagesLinear Control Systems: Ali Karimpour Associate Professor Ferdowsi University of MashhadZain AslamPas encore d'évaluation
- Nyquist Stability Criteria for Linear Control SystemsDocument28 pagesNyquist Stability Criteria for Linear Control SystemsZain AslamPas encore d'évaluation
- Linear Control Systems Time Domain AnalysisDocument24 pagesLinear Control Systems Time Domain AnalysisZain AslamPas encore d'évaluation
- Linear Control Systems: Ali Karimpour Associate Professor Ferdowsi University of MashhadDocument33 pagesLinear Control Systems: Ali Karimpour Associate Professor Ferdowsi University of MashhadZain AslamPas encore d'évaluation
- Design Lag Controller for 45° Phase MarginDocument24 pagesDesign Lag Controller for 45° Phase MarginZain AslamPas encore d'évaluation
- Lec20 LcsDocument26 pagesLec20 LcsZain AslamPas encore d'évaluation
- Linear Control Systems: Ali Karimpour Associate Professor Ferdowsi University of MashhadDocument33 pagesLinear Control Systems: Ali Karimpour Associate Professor Ferdowsi University of MashhadZain AslamPas encore d'évaluation
- Linear Control Systems: Ali Karimpour Associate Professor Ferdowsi University of MashhadDocument23 pagesLinear Control Systems: Ali Karimpour Associate Professor Ferdowsi University of MashhadZain AslamPas encore d'évaluation
- Lec13 LcsDocument27 pagesLec13 LcsZain AslamPas encore d'évaluation
- Lec5 LcsDocument32 pagesLec5 LcsZain AslamPas encore d'évaluation
- Linear Control Systems: Ali Karimpour Associate Professor Ferdowsi University of MashhadDocument28 pagesLinear Control Systems: Ali Karimpour Associate Professor Ferdowsi University of MashhadZain AslamPas encore d'évaluation
- Chevening QuestionsDocument1 pageChevening QuestionsZain AslamPas encore d'évaluation
- 12 07 12 10 43 28 1527 Thenmozhi PDFDocument28 pages12 07 12 10 43 28 1527 Thenmozhi PDFleonardo da vinci0% (1)
- Introduction To CFD: Spring 2017Document7 pagesIntroduction To CFD: Spring 2017Zain AslamPas encore d'évaluation
- 12 07 12 10 43 28 1527 Thenmozhi PDFDocument28 pages12 07 12 10 43 28 1527 Thenmozhi PDFleonardo da vinci0% (1)
- Mechanical Vibrations Basics ExplainedDocument15 pagesMechanical Vibrations Basics ExplainedZain AslamPas encore d'évaluation
- OM ProjectDocument4 pagesOM ProjectZain AslamPas encore d'évaluation
- FFC Internship 2016Document1 pageFFC Internship 2016makPas encore d'évaluation
- ConclusionDocument8 pagesConclusionZain AslamPas encore d'évaluation
- MS 492 Operations Management: Capacity Planning For Products and ServicesDocument30 pagesMS 492 Operations Management: Capacity Planning For Products and ServicesZain AslamPas encore d'évaluation
- FFC Internship 2016Document1 pageFFC Internship 2016makPas encore d'évaluation
- Chapt#01Document26 pagesChapt#01Zain Aslam100% (1)
- How It Works Book of Great InventorsDocument164 pagesHow It Works Book of Great InventorsZain Aslam100% (2)
- GIKI-CPD Caldendar - 2015 Serial No 50 at PEB ListDocument4 pagesGIKI-CPD Caldendar - 2015 Serial No 50 at PEB ListZain AslamPas encore d'évaluation
- Structural Steel Design: Design of Tension Members 2: Universal College of ParañaqueDocument36 pagesStructural Steel Design: Design of Tension Members 2: Universal College of ParañaqueFritz LuzonPas encore d'évaluation
- AminesDocument31 pagesAminesJoseph YayenPas encore d'évaluation
- Class 9 Sample Paper 2020-21Document3 pagesClass 9 Sample Paper 2020-21sasta jiPas encore d'évaluation
- Z 80 HelptopicsDocument5 pagesZ 80 HelptopicsEverly NPas encore d'évaluation
- Modular Forms Exam - Homework RewriteDocument2 pagesModular Forms Exam - Homework RewritejhqwhgadsPas encore d'évaluation
- EWDLEWML Servo Motor DriverDocument14 pagesEWDLEWML Servo Motor DriverWaleed LemsilkhiPas encore d'évaluation
- FINAL Painless Algebra For DavaoDocument28 pagesFINAL Painless Algebra For DavaozapleekillsPas encore d'évaluation
- Iygb Gce: Mathematics MP2 Advanced LevelDocument7 pagesIygb Gce: Mathematics MP2 Advanced Levelsingh cos tanPas encore d'évaluation
- Fulltext PDFDocument454 pagesFulltext PDFVirmantas JuoceviciusPas encore d'évaluation
- JACOB ThirdDocument16 pagesJACOB ThirdWendell ReyesPas encore d'évaluation
- Unit 6 - Quantitative Analysis NotesDocument53 pagesUnit 6 - Quantitative Analysis Notesapi-182809945Pas encore d'évaluation
- Oracle Coherence Admin GuideDocument156 pagesOracle Coherence Admin Guidegisharoy100% (1)
- VeEX OTN Quick Reference GuideDocument12 pagesVeEX OTN Quick Reference GuideDewan H S SalehinPas encore d'évaluation
- Understanding Process ConditionsDocument41 pagesUnderstanding Process ConditionsIbrahim Al-HammadiPas encore d'évaluation
- SE 2003&2008 Pattern PDFDocument799 pagesSE 2003&2008 Pattern PDFBenigno Tique Jonasse100% (1)
- Digital and Analog SignalsDocument10 pagesDigital and Analog SignalsSrishti GargPas encore d'évaluation
- DS White-Papers Getting Started With Business Logic 3DEXPERIENCE R2017x V1Document52 pagesDS White-Papers Getting Started With Business Logic 3DEXPERIENCE R2017x V1AlexandrePas encore d'évaluation
- Design of Three Span Steel Composite FlyoverDocument85 pagesDesign of Three Span Steel Composite FlyoverStructural SpreadsheetsPas encore d'évaluation
- TRL External CommunicationDocument3 pagesTRL External CommunicationAyushGargPas encore d'évaluation
- Maintenance Recommendations: Operation and Maintenance ManualDocument10 pagesMaintenance Recommendations: Operation and Maintenance ManualAmy Nur SPas encore d'évaluation
- Ne7207 Nis Unit 2 Question BankDocument2 pagesNe7207 Nis Unit 2 Question BankalgatesgiriPas encore d'évaluation
- An Intelligent Algorithm For The Protection of Smart Power SystemsDocument8 pagesAn Intelligent Algorithm For The Protection of Smart Power SystemsAhmed WestministerPas encore d'évaluation
- Is 14416 1996Document20 pagesIs 14416 1996kaustavPas encore d'évaluation
- HP ALM FeaturesDocument51 pagesHP ALM FeaturesSuresh ManthaPas encore d'évaluation
- TVL CSS11 Q4 M1Document12 pagesTVL CSS11 Q4 M1Richard SugboPas encore d'évaluation
- CHEM F111: General Chemistry II-Semester Lecture 35 (12-04-2019Document20 pagesCHEM F111: General Chemistry II-Semester Lecture 35 (12-04-2019Rachit ShahPas encore d'évaluation
- Applications of Redox ReactionsDocument50 pagesApplications of Redox ReactionsMlamuli MlarhPas encore d'évaluation
- CSEC-Chemistry-p2 May-June 2012 PDFDocument20 pagesCSEC-Chemistry-p2 May-June 2012 PDFdela250% (4)
- Debre Tabor University: Network and System AdministrationDocument33 pagesDebre Tabor University: Network and System AdministrationBethelhem YetwalePas encore d'évaluation
- Molecular Cell Biology Lodish 7th Edition Solutions ManualDocument8 pagesMolecular Cell Biology Lodish 7th Edition Solutions ManualmarisorbornewwssPas encore d'évaluation