Vous aimerez peut-être aussi
- Iot Lab ManualDocument26 pagesIot Lab Manualniharika0% (1)
- Self Study Book 348 ElsaWinDocument100 pagesSelf Study Book 348 ElsaWinGildardo Casarrubias Segura75% (4)
- CSCI3420 Computer System Architectures Project Phase 2Document6 pagesCSCI3420 Computer System Architectures Project Phase 2Nic02417Pas encore d'évaluation
- IT3030E CA Chap5 CPUDocument82 pagesIT3030E CA Chap5 CPUNguyễn Trương Trường AnPas encore d'évaluation
- Lab Manual-ICP Spring 2020Document30 pagesLab Manual-ICP Spring 2020Anas HussainPas encore d'évaluation
- CA Chap4 Cpu Nlt2021 Part1Document81 pagesCA Chap4 Cpu Nlt2021 Part1Khánh Hoàng VănPas encore d'évaluation
- EE5530 Lecture18 Complete SV TestBenchDocument45 pagesEE5530 Lecture18 Complete SV TestBenchjithinkrishnac4474Pas encore d'évaluation
- CA Chap4 CPUDocument83 pagesCA Chap4 CPUTú PhạmPas encore d'évaluation
- Iot Lab Manualdocx Compress Frtyygh SDDWWQ Qrtyhhb - CompressDocument26 pagesIot Lab Manualdocx Compress Frtyygh SDDWWQ Qrtyhhb - CompressVamsi PillabataniPas encore d'évaluation
- CH5 2Document24 pagesCH5 2sam negroPas encore d'évaluation
- Assemblers Assemblers: System Software System Software Yy by by Leland L. Beck Leland L. BeckDocument62 pagesAssemblers Assemblers: System Software System Software Yy by by Leland L. Beck Leland L. BeckPrabhat BhartolaPas encore d'évaluation
- SV TB Example 1671687516Document30 pagesSV TB Example 1671687516Sumanish SharmaPas encore d'évaluation
- Compiler Lecture 3Document21 pagesCompiler Lecture 3bokhtiarbooksPas encore d'évaluation
- Chapter 3 - Instruction FormatDocument17 pagesChapter 3 - Instruction Formattestscribd9898Pas encore d'évaluation
- CPU Performance CPU Power Consumption.: Computers As Components 3e © 2012 Marilyn WolfDocument33 pagesCPU Performance CPU Power Consumption.: Computers As Components 3e © 2012 Marilyn WolfLordwin MichealPas encore d'évaluation
- CSC 222: Computer Organization: & Assembly LanguageDocument22 pagesCSC 222: Computer Organization: & Assembly Languageذیشان چودھریPas encore d'évaluation
- Compiler Lecture 3Document21 pagesCompiler Lecture 3ShahRiaz PolokPas encore d'évaluation
- 6 RISCvsCISCDocument28 pages6 RISCvsCISCAnushiMaheshwariPas encore d'évaluation
- C Programming: V3AcademycsDocument10 pagesC Programming: V3AcademycsMrinal AgarwalPas encore d'évaluation
- Computer Organization & Computer Organization & Computer Organization & Computer Organization & Assembly Languages Assembly LanguagesDocument119 pagesComputer Organization & Computer Organization & Computer Organization & Computer Organization & Assembly Languages Assembly LanguagesEdel Karlo Sibidal ZarasatePas encore d'évaluation
- CPL Manual 18 SchemeDocument74 pagesCPL Manual 18 SchemedarcyPas encore d'évaluation
- CSC 222: Computer Organization: & Assembly LanguageDocument22 pagesCSC 222: Computer Organization: & Assembly LanguageAbdul RahmanPas encore d'évaluation
- Computer Science Homework WorksheetDocument5 pagesComputer Science Homework WorksheetEe JianPas encore d'évaluation
- L06 - RISCV Datapath DesignDocument78 pagesL06 - RISCV Datapath DesignMishkaat100% (1)
- C Ompiler Theory: (Intermediate C Ode Generation - Abstract S Yntax + 3 Address C Ode)Document32 pagesC Ompiler Theory: (Intermediate C Ode Generation - Abstract S Yntax + 3 Address C Ode)Saipavanesh GuggilapuPas encore d'évaluation
- Lab 7 PDFDocument9 pagesLab 7 PDFLeonardo FuchsPas encore d'évaluation
- Algorithms and Algorithm ConventionDocument28 pagesAlgorithms and Algorithm ConventionSyed Aqib RazaPas encore d'évaluation
- Chapter TwoDocument81 pagesChapter TwoTigist AlemuPas encore d'évaluation
- AAST-CC312-Fall 21-Lec 10Document21 pagesAAST-CC312-Fall 21-Lec 10youssef hossamPas encore d'évaluation
- Chapter 5Document65 pagesChapter 5WEGENE ARGOWPas encore d'évaluation
- Mbed BK Ed2 CH 3Document30 pagesMbed BK Ed2 CH 3Pedro Augusto PeresPas encore d'évaluation
- CS2311 Lec02 BasicDocument83 pagesCS2311 Lec02 BasicHello HK WorldPas encore d'évaluation
- Assembly NotesDocument18 pagesAssembly NotesMoazzam SonuPas encore d'évaluation
- Computer Organization and Assembly Language: Lecture 11 & 12 Instruction Sets: Characteristics and FunctionsDocument17 pagesComputer Organization and Assembly Language: Lecture 11 & 12 Instruction Sets: Characteristics and Functionsdarwinvargas2011Pas encore d'évaluation
- Week 2Document22 pagesWeek 2Shubhadeep GhatakPas encore d'évaluation
- Compier Design AssignmentDocument13 pagesCompier Design AssignmentAshikur Rahman JoyPas encore d'évaluation
- Lecture 02 - MicrocontrollerDocument37 pagesLecture 02 - MicrocontrollerOmar AhmedPas encore d'évaluation
- Unit 4 PCDDocument15 pagesUnit 4 PCDHariniDeviPas encore d'évaluation
- Reading List: Aho-Sethi-Ullman: Chapter 6.1 6.2 Chapter 6.3 6.10 (Note: Glance Through It Only ForDocument33 pagesReading List: Aho-Sethi-Ullman: Chapter 6.1 6.2 Chapter 6.3 6.10 (Note: Glance Through It Only ForEdgardo KamadaPas encore d'évaluation
- Code Gen Part 2Document38 pagesCode Gen Part 2pajadhavPas encore d'évaluation
- Module 2Document14 pagesModule 2yashmit maviPas encore d'évaluation
- What Is A Computer?Document7 pagesWhat Is A Computer?arulamPas encore d'évaluation
- Algorithms and Algorithm ConventionDocument28 pagesAlgorithms and Algorithm ConventionFizza IrfanPas encore d'évaluation
- CPU Organization Bindu AgarwallaDocument22 pagesCPU Organization Bindu AgarwallaNobodyPas encore d'évaluation
- Ca 2 Marks & Big Ques PDFDocument96 pagesCa 2 Marks & Big Ques PDFsathya priyaPas encore d'évaluation
- 01 Introduction To ProgramingDocument26 pages01 Introduction To ProgramingThomas OnitaPas encore d'évaluation
- IICT Lecture # 01 Computer Definitions and BasicsDocument34 pagesIICT Lecture # 01 Computer Definitions and BasicsRajab AliPas encore d'évaluation
- Tema 2 GII EC Lenguaje Ensamblador Latest PDFDocument88 pagesTema 2 GII EC Lenguaje Ensamblador Latest PDFJorge ArmasPas encore d'évaluation
- 03 Tutorial 01Document27 pages03 Tutorial 01SachinthaPas encore d'évaluation
- LEC08Document52 pagesLEC08Zain AliPas encore d'évaluation
- Lab01 GDBDocument5 pagesLab01 GDBNahhPas encore d'évaluation
- Bill Process: Scan Product Enter No of Units Calc Bill: Dept Store Billing System DiscountDocument13 pagesBill Process: Scan Product Enter No of Units Calc Bill: Dept Store Billing System DiscountMir Mohammed AliPas encore d'évaluation
- EE182: Computer Org. & Design Handout #05Document8 pagesEE182: Computer Org. & Design Handout #05ssridharatiwari0001Pas encore d'évaluation
- ch2 PDFDocument66 pagesch2 PDFYousef MomaniPas encore d'évaluation
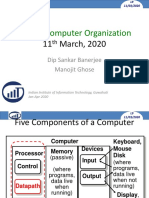
- CS104: Computer Organization: 11 March, 2020Document37 pagesCS104: Computer Organization: 11 March, 2020Om PrakashPas encore d'évaluation
- Computer Programming Laboratory Work 4Document7 pagesComputer Programming Laboratory Work 4Maia ZaicaPas encore d'évaluation
- EE5530 Lecture17 Complete SV TestBench With SCBDocument35 pagesEE5530 Lecture17 Complete SV TestBench With SCBjithinkrishnac4474Pas encore d'évaluation
- Spos Lab ManualDocument63 pagesSpos Lab ManualishikaPas encore d'évaluation
- C Programming for the Pc the Mac and the Arduino Microcontroller SystemD'EverandC Programming for the Pc the Mac and the Arduino Microcontroller SystemPas encore d'évaluation
- CISCO PACKET TRACER LABS: Best practice of configuring or troubleshooting NetworkD'EverandCISCO PACKET TRACER LABS: Best practice of configuring or troubleshooting NetworkPas encore d'évaluation
- Conceptual Programming: Conceptual Programming: Learn Programming the old way!D'EverandConceptual Programming: Conceptual Programming: Learn Programming the old way!Pas encore d'évaluation
- Cyber Security Maintenance Based On Human-Technology Aspects in Digital Transformation EraDocument5 pagesCyber Security Maintenance Based On Human-Technology Aspects in Digital Transformation EraNaz SamPas encore d'évaluation
- Cyber SecurityDocument21 pagesCyber SecurityNaz SamPas encore d'évaluation
- Competency FrameworkDocument47 pagesCompetency FrameworkNaz SamPas encore d'évaluation
- Personal Details: Name: Postal Address: Email: Iqama NO: Nationality: Date of Birth: Contact NoDocument3 pagesPersonal Details: Name: Postal Address: Email: Iqama NO: Nationality: Date of Birth: Contact NoNaz SamPas encore d'évaluation
- Ruqiya MagicDocument28 pagesRuqiya MagicAmadou Sow100% (2)
- Ruqiya MagicDocument28 pagesRuqiya MagicAmadou Sow100% (2)
- Morning/Eveningazkar: Recite Between Asr To Magrib Sura Al-Fateha Dua 2 Al-Bakarah Verse 1-5Document11 pagesMorning/Eveningazkar: Recite Between Asr To Magrib Sura Al-Fateha Dua 2 Al-Bakarah Verse 1-5Naz SamPas encore d'évaluation
- Publication StatisticsDocument15 pagesPublication StatisticsNaz SamPas encore d'évaluation
- LoaderDocument29 pagesLoaderAmanda DodsonPas encore d'évaluation
- Feeder Protection and Control REF601 and REJ601 ANSI: Product GuideDocument20 pagesFeeder Protection and Control REF601 and REJ601 ANSI: Product GuideAdarsh SharmaPas encore d'évaluation
- 5 - Foundations - 11 - 26 - 2 - M5Document73 pages5 - Foundations - 11 - 26 - 2 - M5Viktor BesenyeiPas encore d'évaluation
- Cyiv 51003Document18 pagesCyiv 51003flo72afPas encore d'évaluation
- VT Directed Io SpecDocument297 pagesVT Directed Io SpechobomanPas encore d'évaluation
- User Manual Planmeca Dimaxis Pro Version 2 eDocument35 pagesUser Manual Planmeca Dimaxis Pro Version 2 eLuis Alberto Díaz OlmedoPas encore d'évaluation
- Shrink A PartitionDocument5 pagesShrink A PartitionPriyesh ETPas encore d'évaluation
- LG N4B1 HDD Compatibility 20090623Document1 pageLG N4B1 HDD Compatibility 20090623pikkenPas encore d'évaluation
- Data Structures Power Point PresentationDocument54 pagesData Structures Power Point PresentationShreehari KulkarniPas encore d'évaluation
- C Programming BookDocument23 pagesC Programming BooknurarPas encore d'évaluation
- 2020 It SyllabusDocument118 pages2020 It SyllabusNisha JodhanPas encore d'évaluation
- A Survey On - Page Replacement AlgorithmsDocument13 pagesA Survey On - Page Replacement AlgorithmsSimeon ElijahPas encore d'évaluation
- Oceanspace S2600 Data SheetDocument4 pagesOceanspace S2600 Data SheetUtopia MediaPas encore d'évaluation
- OS Viva QuestionDocument6 pagesOS Viva QuestionRuchika NaikPas encore d'évaluation
- MCQ Bank For Computer FundamentalsDocument4 pagesMCQ Bank For Computer FundamentalsEgeru JosephPas encore d'évaluation
- Iscsi Initiator Client Setup LinuxDocument3 pagesIscsi Initiator Client Setup Linuxdatadisk10Pas encore d'évaluation
- TandD RVR-52A ManualDocument2 pagesTandD RVR-52A Manualmalcolmm27Pas encore d'évaluation
- The Definitive Guide To Hyperconverged Infrastructure: How Nutanix WorksDocument26 pagesThe Definitive Guide To Hyperconverged Infrastructure: How Nutanix Worksvinoth kumar100% (1)
- Digital Download and File StorageDocument8 pagesDigital Download and File StorageSimon JobPas encore d'évaluation
- Colossus TrainingDocument44 pagesColossus TrainingVictor Ricardo Garnica PhilippsPas encore d'évaluation
- Western Digital Model NumbersDocument2 pagesWestern Digital Model NumbersOlaf HaflpafPas encore d'évaluation
- Exploded View Parts List (UA55ES7100RXXP)Document14 pagesExploded View Parts List (UA55ES7100RXXP)Andrew TraballoPas encore d'évaluation
- Lesson 1.2 PC Components Lesson 2Document57 pagesLesson 1.2 PC Components Lesson 2Kaye CorPas encore d'évaluation
- Class 9th - Chapter 3 - ITDocument4 pagesClass 9th - Chapter 3 - ITDevansh nayyarPas encore d'évaluation
- Lec-1 (Introduction To Computer - OMT-I)Document61 pagesLec-1 (Introduction To Computer - OMT-I)Qazi AamadPas encore d'évaluation
- Bai Cfo - 102 - Unit 1Document35 pagesBai Cfo - 102 - Unit 1Aman SinghPas encore d'évaluation
- Network Servers Lecture 2 NotesDocument8 pagesNetwork Servers Lecture 2 NotesShivend MenonPas encore d'évaluation
- SC 415120Document256 pagesSC 415120Rahul JaiswalPas encore d'évaluation
- 26-789 Eng Manual Pcd3Document133 pages26-789 Eng Manual Pcd3Antun KoricPas encore d'évaluation