Vous aimerez peut-être aussi
- The System by Todd Valentine - Review & Summary - Power Dynamics™ PDFDocument33 pagesThe System by Todd Valentine - Review & Summary - Power Dynamics™ PDFshadowzack 509Pas encore d'évaluation
- 022 05-00-00 Inertial Navigation and Reference Systems Amend0Document16 pages022 05-00-00 Inertial Navigation and Reference Systems Amend0kashimotocomotuyaPas encore d'évaluation
- R Gupta - Joint CSIR-UGC NET JRF Physical Sciences (2021, Ramesh Publishing House) - Libgen - LiDocument378 pagesR Gupta - Joint CSIR-UGC NET JRF Physical Sciences (2021, Ramesh Publishing House) - Libgen - LiVasudevan SubramaniyanPas encore d'évaluation
- Inertial Navigation SystemsDocument39 pagesInertial Navigation SystemsAnkur SinghPas encore d'évaluation
- Pas 8811 2017Document42 pagesPas 8811 2017Mohammed HafizPas encore d'évaluation
- FOGINS Paper Final PDFDocument11 pagesFOGINS Paper Final PDFprakasa88Pas encore d'évaluation
- Naval Aviation News - Dec 1950Document36 pagesNaval Aviation News - Dec 1950CAP History Library100% (1)
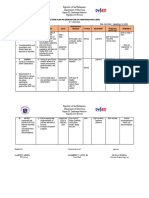
- Action Plan ESP 2023 24Document2 pagesAction Plan ESP 2023 24Je-Ann EstriborPas encore d'évaluation
- PyGMTSAR: Sentinel-1 Python InSAR. An Introduction: Python InSAR, #1D'EverandPyGMTSAR: Sentinel-1 Python InSAR. An Introduction: Python InSAR, #1Pas encore d'évaluation
- GPS INS Urban SettingDocument9 pagesGPS INS Urban SettingLogesan SrinivasaluPas encore d'évaluation
- Using: Determination Integrated Navigation System Requirements Landing Craft Off The Shelf HardwareDocument6 pagesUsing: Determination Integrated Navigation System Requirements Landing Craft Off The Shelf HardwareRishabh PandeyPas encore d'évaluation
- Chan SHP Final-NolinksDocument3 pagesChan SHP Final-NolinksaliPas encore d'évaluation
- Dgps/Ins/Vvheelsensor Integration For High Accuracy Land-Vehicle PositioningDocument10 pagesDgps/Ins/Vvheelsensor Integration For High Accuracy Land-Vehicle PositioningRăzvan PopaPas encore d'évaluation
- Gps/Ins: See AlsoDocument1 pageGps/Ins: See AlsoTare Er KshitijPas encore d'évaluation
- Low Cost GPS INS Sensor Fusion System For UAV NavigationDocument9 pagesLow Cost GPS INS Sensor Fusion System For UAV NavigationThaung Htut KhaungPas encore d'évaluation
- NMEA-0183 Sentences Analysis Tool From The GPS System To Increase The Positional AccuracyDocument8 pagesNMEA-0183 Sentences Analysis Tool From The GPS System To Increase The Positional AccuracyJournal of TelecommunicationsPas encore d'évaluation
- A Review of Navigation Systems (Integration and Algorithms)Document17 pagesA Review of Navigation Systems (Integration and Algorithms)amguardia100% (1)
- TreasureSS PTechDocument52 pagesTreasureSS PTechruddyrezzaPas encore d'évaluation
- Fuzzy Adaptive Kalman Filtering For INS/GPS Data Fusion: February 2000Document7 pagesFuzzy Adaptive Kalman Filtering For INS/GPS Data Fusion: February 2000alfaristelecomPas encore d'évaluation
- Implementation and Statistical Analysis of A Differential GPS SystemDocument61 pagesImplementation and Statistical Analysis of A Differential GPS SystemRajesh KarriPas encore d'évaluation
- Gps (Global Positioning System)Document14 pagesGps (Global Positioning System)Ekansh GuptaPas encore d'évaluation
- DGPS Surveying InstrumentDocument5 pagesDGPS Surveying InstrumentAnkit kumat100% (1)
- Mechanization and Error Analysis of Aiding Systems in Civilian and Military Vehicle Navigation Using Matlab SoftwareDocument17 pagesMechanization and Error Analysis of Aiding Systems in Civilian and Military Vehicle Navigation Using Matlab SoftwareijctcmjournalPas encore d'évaluation
- Pros and Cons of The Global Positioning SystemDocument55 pagesPros and Cons of The Global Positioning SystemAl_Ahnaf_Akbar_9295Pas encore d'évaluation
- D AdaptiveKalman Sensors 19 01142 v2Document24 pagesD AdaptiveKalman Sensors 19 01142 v2German QuirozPas encore d'évaluation
- Hyun Hak Cho 2013Document6 pagesHyun Hak Cho 2013huy.tranvugia1305Pas encore d'évaluation
- International Institute of Management Engineering and TechnologyDocument26 pagesInternational Institute of Management Engineering and TechnologyTarun AgrawalPas encore d'évaluation
- Schmidt, G. T. (2010) - INSGPS Technology TrendsDocument23 pagesSchmidt, G. T. (2010) - INSGPS Technology TrendsFísica La SallePas encore d'évaluation
- Articulo OK VerDocument7 pagesArticulo OK VeryuniervPas encore d'évaluation
- Assignment of Avionics 2Document9 pagesAssignment of Avionics 2pramod kumar yadavPas encore d'évaluation
- Chapter 1 - Differential GPS: RTO-AG-160-V21 1 - 1Document18 pagesChapter 1 - Differential GPS: RTO-AG-160-V21 1 - 1ravifireblade8402Pas encore d'évaluation
- Gps Thesis SubmissionDocument5 pagesGps Thesis SubmissionBuyCheapPaperOnlineScottsdale100% (2)
- The Use of GPS and INSDocument6 pagesThe Use of GPS and INStangphamvanPas encore d'évaluation
- A Kalman Filter Approach To Reduce Position Error For Pedestrian Applications in Areas of Bad GPS ReceptionDocument36 pagesA Kalman Filter Approach To Reduce Position Error For Pedestrian Applications in Areas of Bad GPS ReceptionMohamed NourPas encore d'évaluation
- PANDA Software and Its Preliminary Result of Positioning and Orbit DeterminationDocument9 pagesPANDA Software and Its Preliminary Result of Positioning and Orbit DeterminationkiopogmailcomPas encore d'évaluation
- POSPac GNSS-Inertial ToolsDocument252 pagesPOSPac GNSS-Inertial ToolsMirosław KrawczykPas encore d'évaluation
- Answers 5 QuestionsDocument4 pagesAnswers 5 QuestionsMesba HoquePas encore d'évaluation
- Remote Sensing Satellite Data Demodulation and Bit Synchronization-2Document12 pagesRemote Sensing Satellite Data Demodulation and Bit Synchronization-2IAEME PublicationPas encore d'évaluation
- The Role of Kalman Filter in The Modelling of GPSDocument8 pagesThe Role of Kalman Filter in The Modelling of GPSaseel jadallahPas encore d'évaluation
- EScholarship UC Idedtem 5s740738Document28 pagesEScholarship UC Idedtem 5s740738Guillermo Soto ZuñigaPas encore d'évaluation
- Development of A Low-Cost Solution For GPSGyro AttDocument11 pagesDevelopment of A Low-Cost Solution For GPSGyro AttCamacho Camacho RochaPas encore d'évaluation
- Satellite Based SurveyingDocument8 pagesSatellite Based SurveyingMusiime AlvinPas encore d'évaluation
- Guochang Xu, Yan Xu - GPS Theory, Algorithms and Applications (2016) - ChapterDocument15 pagesGuochang Xu, Yan Xu - GPS Theory, Algorithms and Applications (2016) - Chapternaura APas encore d'évaluation
- ANNUAL OF NAVIGATION 19/2012/part 2: Synergetic Concept of Algorithms Autonomous Inertial Navigation SystemsDocument13 pagesANNUAL OF NAVIGATION 19/2012/part 2: Synergetic Concept of Algorithms Autonomous Inertial Navigation SystemsversinePas encore d'évaluation
- POSMV - 2005 - 09 - Motion Sensor ComparisonDocument18 pagesPOSMV - 2005 - 09 - Motion Sensor Comparisonchakib tabPas encore d'évaluation
- Report Gps YashDocument17 pagesReport Gps YashYash PatelPas encore d'évaluation
- IMAR - Basic Ternms in IMUDocument6 pagesIMAR - Basic Ternms in IMUReds TarPas encore d'évaluation
- Integration of Gnss PP Virtual Reference Station With Inertial DataDocument6 pagesIntegration of Gnss PP Virtual Reference Station With Inertial DataarashPas encore d'évaluation
- Global Positioning System: Presented by K.Manoj Kumar P.SindhushaDocument18 pagesGlobal Positioning System: Presented by K.Manoj Kumar P.SindhushabadimalamadhuPas encore d'évaluation
- INS-U Datasheet Rev-2.12 Oct 2023Document4 pagesINS-U Datasheet Rev-2.12 Oct 2023ManojGRamakrishnaPas encore d'évaluation
- Differential GPSDocument2 pagesDifferential GPSAimanPas encore d'évaluation
- How Does DGPS (Differential GPS) Work - RACELOGIC Support CentreDocument10 pagesHow Does DGPS (Differential GPS) Work - RACELOGIC Support CentreMAHESH CHANDPas encore d'évaluation
- Anti Spoofing and Selective AvailabilityDocument2 pagesAnti Spoofing and Selective Availabilityanjali9myneniPas encore d'évaluation
- Fuzzy Logic Based-Map Matching Algorithm For Vehicle Navigation System in Urban CanyonsDocument12 pagesFuzzy Logic Based-Map Matching Algorithm For Vehicle Navigation System in Urban CanyonsDivya KhandelwalPas encore d'évaluation
- 1-Differential GPS ExplainedDocument5 pages1-Differential GPS ExplainedGanga BasinPas encore d'évaluation
- 4 FrancajuniorMorgadoDocument10 pages4 FrancajuniorMorgadoAdetoro Mal PascalPas encore d'évaluation
- Cadastral PPT (Unit 5)Document97 pagesCadastral PPT (Unit 5)Abdifetah SheikmohamedPas encore d'évaluation
- What Is The Difference Between An Inertial Navigation SystemDocument7 pagesWhat Is The Difference Between An Inertial Navigation SystemManoj GowdarPas encore d'évaluation
- A Simple Observer For Gyro and Accelerometer Biases in Land Navigation SystemsDocument14 pagesA Simple Observer For Gyro and Accelerometer Biases in Land Navigation Systemsdewe sunPas encore d'évaluation
- Advanced Navigation System For Aircraft Applicatio PDFDocument8 pagesAdvanced Navigation System For Aircraft Applicatio PDFKastor ROPas encore d'évaluation
- 51 Wavelet De-Noising For IMU AlignmentDocument8 pages51 Wavelet De-Noising For IMU AlignmentHuneza AtaPas encore d'évaluation
- Bec 401 Thesis Ii: TOPIC: Accuracy Comparison Between Ground Control Survey and Differential Global Positioning SystemDocument39 pagesBec 401 Thesis Ii: TOPIC: Accuracy Comparison Between Ground Control Survey and Differential Global Positioning SystemAlvinchiew CSPas encore d'évaluation
- Gps Seminar ReportDocument13 pagesGps Seminar ReportRAJESH KAMBOJPas encore d'évaluation
- Loosely Coupled GPS INS Integration With Kalman Filtering For Land Vehicle ApplicationsDocument6 pagesLoosely Coupled GPS INS Integration With Kalman Filtering For Land Vehicle Applicationstolgacakir185Pas encore d'évaluation
- The SatNav Users Guide to Navigation and Mapping Using GPSD'EverandThe SatNav Users Guide to Navigation and Mapping Using GPSÉvaluation : 1 sur 5 étoiles1/5 (2)
- Lecture 01 03 Unit1Document19 pagesLecture 01 03 Unit1Achintya SarkarPas encore d'évaluation
- Fligbt Data Com-Patibility Check Using Bfgs Under Limited Measurements Through Multi-Sensor Data FusionDocument9 pagesFligbt Data Com-Patibility Check Using Bfgs Under Limited Measurements Through Multi-Sensor Data FusionAchintya SarkarPas encore d'évaluation
- Multi Sensor Data FusionDocument65 pagesMulti Sensor Data FusionAchintya SarkarPas encore d'évaluation
- Introduction To ImmDocument83 pagesIntroduction To ImmAchintya SarkarPas encore d'évaluation
- Estimation Before Modeling Approach (EBM) : (Aerodynamic Parameters Estimation of Tactical Flight Vehicles)Document57 pagesEstimation Before Modeling Approach (EBM) : (Aerodynamic Parameters Estimation of Tactical Flight Vehicles)Achintya Sarkar100% (1)
- Introduction To GPS and Determination of Receiver PositionDocument58 pagesIntroduction To GPS and Determination of Receiver PositionAchintya SarkarPas encore d'évaluation
- Missile Guidance (Lecture 2) : DR A K Sarkar (Visiting Faculty, Aerospace Engg Dept) DIAT PuneDocument58 pagesMissile Guidance (Lecture 2) : DR A K Sarkar (Visiting Faculty, Aerospace Engg Dept) DIAT PuneAchintya SarkarPas encore d'évaluation
- Sarkar Presentation 01Document84 pagesSarkar Presentation 01Achintya SarkarPas encore d'évaluation
- The Strange Life of Nikola TeslaDocument8 pagesThe Strange Life of Nikola TeslaMohammad MetlejPas encore d'évaluation
- 4.4.1.4 DLL - ENGLISH-6 - Q4 - W4.docx Version 1Document13 pages4.4.1.4 DLL - ENGLISH-6 - Q4 - W4.docx Version 1Gie Escoto Ocampo100% (1)
- Chilling & Freezing: Dr. Tanya Luva SwerDocument35 pagesChilling & Freezing: Dr. Tanya Luva SwerPratyusha DPas encore d'évaluation
- EF3e Intplus Filetest 4aDocument7 pagesEF3e Intplus Filetest 4aЯна ИвановаPas encore d'évaluation
- Valuasi Ekonomi Taman Wisata Alam Punti Kayu Palembang PDFDocument11 pagesValuasi Ekonomi Taman Wisata Alam Punti Kayu Palembang PDFVictorPas encore d'évaluation
- Raju ComparativePhilosophySpiritual 1963Document16 pagesRaju ComparativePhilosophySpiritual 1963Kent Jerson CasianoPas encore d'évaluation
- Chem Ch4 NIE Premium NOtesDocument19 pagesChem Ch4 NIE Premium NOtesAadil ShaikhPas encore d'évaluation
- Bath Uni Coursework Cover SheetDocument8 pagesBath Uni Coursework Cover Sheetvtdvkkjbf100% (2)
- 105 GulletDocument8 pages105 GulletkarthiPas encore d'évaluation
- Hydration of Calcium Aluminate Cement Phase Ca and Ca2 in Refractory ApplicationsDocument4 pagesHydration of Calcium Aluminate Cement Phase Ca and Ca2 in Refractory Applicationsakanksha.kumariPas encore d'évaluation
- Kiyora Catlog SeiresDocument6 pagesKiyora Catlog SeiresMd SazadPas encore d'évaluation
- ENDO Agar: Mode of Action LiteratureDocument2 pagesENDO Agar: Mode of Action LiteratureadiazcalidadPas encore d'évaluation
- Zero Gravity ManufacturingDocument17 pagesZero Gravity Manufacturingsunny sunnyPas encore d'évaluation
- SKYTEC Datasheet TEAL 0723Document2 pagesSKYTEC Datasheet TEAL 0723mailtoshiyasPas encore d'évaluation
- SCR Control System, DIA - NE XT4: Technical InstructionDocument48 pagesSCR Control System, DIA - NE XT4: Technical InstructionAli QaziPas encore d'évaluation
- BUS 8375 Lec. 11 Assignment 4 Qualitative Analysis v.1 1Document8 pagesBUS 8375 Lec. 11 Assignment 4 Qualitative Analysis v.1 1Jaspal SinghPas encore d'évaluation
- PE2 Part1Document12 pagesPE2 Part1Iser FrostPas encore d'évaluation
- Đề HSG Tiếng Anh 11 - 2021Document7 pagesĐề HSG Tiếng Anh 11 - 2021Vân Anh OncePas encore d'évaluation
- Master Production Schedule (MPS)Document6 pagesMaster Production Schedule (MPS)lida diazPas encore d'évaluation
- Sample Ym ProposalDocument11 pagesSample Ym ProposalAfiq KechekPas encore d'évaluation
- Past Papers of SociologyDocument7 pagesPast Papers of SociologyAlihaPas encore d'évaluation
- Hight Speep Tool SteelDocument11 pagesHight Speep Tool SteelcadcamtaiPas encore d'évaluation
- Resonance UnlockedDocument5 pagesResonance UnlockedgjjgPas encore d'évaluation
- Ahmad Faizal Bin Ahmad Zahari (Resume)Document15 pagesAhmad Faizal Bin Ahmad Zahari (Resume)ahmad faizalPas encore d'évaluation
- Decimal Million & Fraction MillionDocument21 pagesDecimal Million & Fraction MillionSuganthi SupaiahPas encore d'évaluation