Vous aimerez peut-être aussi
- Aviation Electronics Technician 1Document332 pagesAviation Electronics Technician 1hariharasankar100% (3)
- Woodward Governor Digital Modules Valves Actuators Miscellaneous Parts en 7496354Document89 pagesWoodward Governor Digital Modules Valves Actuators Miscellaneous Parts en 7496354kim jong sik50% (2)
- Kalman FilteringDocument70 pagesKalman FilteringlalusebanPas encore d'évaluation
- Global Positioning SystemsDocument34 pagesGlobal Positioning Systemsthupten tsundue100% (1)
- LidarDocument47 pagesLidarRodrigo UrbanoPas encore d'évaluation
- Raspberry PiDocument19 pagesRaspberry PiAnonymous E4Rbo2s100% (1)
- Diagrama Electrico 320c PDFDocument2 pagesDiagrama Electrico 320c PDFPutra Jawa100% (1)
- The ISO27k Standards: # Standard Published Title NotesDocument8 pagesThe ISO27k Standards: # Standard Published Title NotesGiselle GirondinPas encore d'évaluation
- SPD39T 39B6X Service Manual-01-0226 PDFDocument63 pagesSPD39T 39B6X Service Manual-01-0226 PDFAlejandroVCMXPas encore d'évaluation
- Global Trends in Space-Based SIGINT SystemsDocument39 pagesGlobal Trends in Space-Based SIGINT SystemscartosatPas encore d'évaluation
- Datum Transformation and Coordinate ConversionDocument18 pagesDatum Transformation and Coordinate Conversionnajmi100% (1)
- Introduction To ImmDocument83 pagesIntroduction To ImmAchintya SarkarPas encore d'évaluation
- ECE - Tracking Nonlinear - Pandharinath ADocument4 pagesECE - Tracking Nonlinear - Pandharinath ATJPRC PublicationsPas encore d'évaluation
- Sentinel-2 MSI Comparison To Landsat-8 OLIDocument11 pagesSentinel-2 MSI Comparison To Landsat-8 OLIFenrihrPas encore d'évaluation
- Principles of GPS: Prof. M R Sivaraman 1 January 2019 Fifth Talk of The Webinar A Course of GeodesyDocument51 pagesPrinciples of GPS: Prof. M R Sivaraman 1 January 2019 Fifth Talk of The Webinar A Course of GeodesyPrasanna NaikPas encore d'évaluation
- BenjaminBraeutigam ExternalCalibrationTerraSAR-XDocument5 pagesBenjaminBraeutigam ExternalCalibrationTerraSAR-XTestPas encore d'évaluation
- Project of Mechanical Measurement and Control SystemDocument20 pagesProject of Mechanical Measurement and Control SystemPrashant Singh SankhalaPas encore d'évaluation
- GmE 202 Lecture 11 Field Methods in Remote SensingDocument57 pagesGmE 202 Lecture 11 Field Methods in Remote SensingRhea Lyn CayobitPas encore d'évaluation
- Dual-Frequency GPS/GLONASS RTK: Experimental Results: Javad Positioning SystemsDocument4 pagesDual-Frequency GPS/GLONASS RTK: Experimental Results: Javad Positioning SystemsСергей ТатарченкоPas encore d'évaluation
- INS-GPS PressDocument33 pagesINS-GPS PresstommihadityaPas encore d'évaluation
- Independent Calibration of Sentinel-1B Radar SatelliteDocument34 pagesIndependent Calibration of Sentinel-1B Radar SatelliteTestPas encore d'évaluation
- Combined mapping with IRST and LIDAR sensorsDocument16 pagesCombined mapping with IRST and LIDAR sensorsMariappan RamaPas encore d'évaluation
- Lecture 01Document18 pagesLecture 01Kerry SungPas encore d'évaluation
- Bec 401 Thesis Ii: TOPIC: Accuracy Comparison Between Ground Control Survey and Differential Global Positioning SystemDocument39 pagesBec 401 Thesis Ii: TOPIC: Accuracy Comparison Between Ground Control Survey and Differential Global Positioning SystemAlvinchiew CSPas encore d'évaluation
- MDIw MTQ5 OADocument5 pagesMDIw MTQ5 OAPandurang GurakhePas encore d'évaluation
- Application of The Global Positioning System To The Measurement of Overhead Power Transmission Conductor SagDocument6 pagesApplication of The Global Positioning System To The Measurement of Overhead Power Transmission Conductor SagGabriel AlcarazPas encore d'évaluation
- SATRACKDocument22 pagesSATRACKapi-19937584100% (6)
- Journey To The Moving CenterDocument42 pagesJourney To The Moving CenterThomas EnglishPas encore d'évaluation
- Synthetic Aperture Radar Principles and Applications of AI in Automatic Target RecognitionDocument6 pagesSynthetic Aperture Radar Principles and Applications of AI in Automatic Target RecognitionoveiskntuPas encore d'évaluation
- Los Rates Angles Using Ekf From Seeker Measurements M R K Iisc, DRDLDocument5 pagesLos Rates Angles Using Ekf From Seeker Measurements M R K Iisc, DRDLMissile MtaPas encore d'évaluation
- Dgps Survey For BWDBDocument34 pagesDgps Survey For BWDBShafiqul HasanPas encore d'évaluation
- Seminar Report 2021-22 SatrackDocument15 pagesSeminar Report 2021-22 SatrackClassic PrintersPas encore d'évaluation
- Lidar Report and SpecificationsDocument5 pagesLidar Report and SpecificationsFernando NunezPas encore d'évaluation
- Surveying2 Exam Note (JAN 18) : Vertical Curve FormulasDocument5 pagesSurveying2 Exam Note (JAN 18) : Vertical Curve FormulaslucasPas encore d'évaluation
- Cross-Calibration of Irs-1C, - 1D and - P6: Wide Angle Sensors Using Synchronous or Near Synchronous Matching ScenesDocument4 pagesCross-Calibration of Irs-1C, - 1D and - P6: Wide Angle Sensors Using Synchronous or Near Synchronous Matching ScenesGeologians DUPas encore d'évaluation
- 480 PresentationDocument29 pages480 PresentationMariamPas encore d'évaluation
- Navigation Systems and Their ImplementationDocument29 pagesNavigation Systems and Their ImplementationJustin RajaPas encore d'évaluation
- MASTER: The MODIS/ASTER Airborne SimulatorDocument68 pagesMASTER: The MODIS/ASTER Airborne Simulatorjpeterson1Pas encore d'évaluation
- Vibration-based Condition Monitoring of Wind Turbine Gearbox: Frequency Domain ApproachesDocument29 pagesVibration-based Condition Monitoring of Wind Turbine Gearbox: Frequency Domain ApproachesAndrei AlexPas encore d'évaluation
- Pasang SurutDocument32 pagesPasang SurutRomi OktavianusPas encore d'évaluation
- GIS - Lecture 4 - Maps and GIS IIDocument20 pagesGIS - Lecture 4 - Maps and GIS IINimra KhanPas encore d'évaluation
- Field Test of Long Range Terrestrial Laser Scanner and Ground-Based Synthetic Aperture Radar For Area Monitoring in Open Pit MinesDocument12 pagesField Test of Long Range Terrestrial Laser Scanner and Ground-Based Synthetic Aperture Radar For Area Monitoring in Open Pit Minesvictor elver guevara cerveraPas encore d'évaluation
- Overview of The Resourcesat-1 (IRS-P6)Document27 pagesOverview of The Resourcesat-1 (IRS-P6)dudstomPas encore d'évaluation
- Sat Rack 1Document25 pagesSat Rack 1sandeepsanandsandeepPas encore d'évaluation
- SECTION 7A - Carleton SAR Training - SAR_processing_Sentinal1 - FINALDocument52 pagesSECTION 7A - Carleton SAR Training - SAR_processing_Sentinal1 - FINALStroe DanielPas encore d'évaluation
- GMTSARDocument96 pagesGMTSARhanggarPKPas encore d'évaluation
- Terrestrial Laser Scanning Principles: Chris Crosby, UNAVCODocument23 pagesTerrestrial Laser Scanning Principles: Chris Crosby, UNAVCOJuan Bello AvilésPas encore d'évaluation
- TLS and UAV Image ProcessingDocument104 pagesTLS and UAV Image ProcessingMihai SimonPas encore d'évaluation
- GPSDocument35 pagesGPSak721Pas encore d'évaluation
- GPS RTK Performance Characteristics and AnalysisDocument8 pagesGPS RTK Performance Characteristics and AnalysisThanate JongrujinanPas encore d'évaluation
- DGPS 28oct, 2010 EdusatDocument28 pagesDGPS 28oct, 2010 EdusatsgrrscPas encore d'évaluation
- Accuracy Assestment of Dgps in Control Survey Work in MinesDocument28 pagesAccuracy Assestment of Dgps in Control Survey Work in MinessumitmathePas encore d'évaluation
- Experiments With National Digital Elevation ModelsDocument37 pagesExperiments With National Digital Elevation ModelsRichard SarominesPas encore d'évaluation
- Amdl Intro To GPSDocument29 pagesAmdl Intro To GPSgaurang1111Pas encore d'évaluation
- Fruits Satrack DocumentationDocument22 pagesFruits Satrack Documentationmar 931996Pas encore d'évaluation
- Aparna Rathi SC E: Electronics & Radar Development Establishment (LRDE)Document91 pagesAparna Rathi SC E: Electronics & Radar Development Establishment (LRDE)muvin236Pas encore d'évaluation
- SatracDocument18 pagesSatracvenkat_raj_38Pas encore d'évaluation
- AAS 03-003 The Inertial Stellar Compass: A Multifunction, Low Power, Attitude Determination Technology BreakthroughDocument18 pagesAAS 03-003 The Inertial Stellar Compass: A Multifunction, Low Power, Attitude Determination Technology BreakthroughSmarth SareenPas encore d'évaluation
- Wind Profiler Signal & Data Processing: - Anil Anant KulkarniDocument29 pagesWind Profiler Signal & Data Processing: - Anil Anant KulkarniManas SarkarPas encore d'évaluation
- Real Aperture Image Generation and Correlation StudyDocument52 pagesReal Aperture Image Generation and Correlation StudyKarthik G SrinivasanPas encore d'évaluation
- Measuring Power Line Sag from GPS DataDocument10 pagesMeasuring Power Line Sag from GPS DataBhaskar Dutta KarmakarPas encore d'évaluation
- MethodologyDocument6 pagesMethodologySridhar DantuluriPas encore d'évaluation
- Modernized IRNSS Broadcast Ephemeris ParametersDocument10 pagesModernized IRNSS Broadcast Ephemeris Parametersstoner beamPas encore d'évaluation
- D06-04 KnippersPPTeachingDocument45 pagesD06-04 KnippersPPTeachingUNNATI AGRAWALPas encore d'évaluation
- Igarss 2019 8898518Document4 pagesIgarss 2019 8898518Andrés BuitragoPas encore d'évaluation
- Introduction To The Physics and Techniques of Remote SensingD'EverandIntroduction To The Physics and Techniques of Remote SensingPas encore d'évaluation
- Mce371 - 2 Vibration Richer Cleevland State UniversityDocument18 pagesMce371 - 2 Vibration Richer Cleevland State UniversityAchintya SarkarPas encore d'évaluation
- Lecture 01 - Prolog - Unit1 PDFDocument6 pagesLecture 01 - Prolog - Unit1 PDFAchintya SarkarPas encore d'évaluation
- Lecture 01 02 Unit2 PDFDocument15 pagesLecture 01 02 Unit2 PDFAchintya SarkarPas encore d'évaluation
- In NMIT Control Theory Chapter 1lecture 01 - Prolog - Unit1Document6 pagesIn NMIT Control Theory Chapter 1lecture 01 - Prolog - Unit1Achintya SarkarPas encore d'évaluation
- Lecture 04 Unit1 PDFDocument9 pagesLecture 04 Unit1 PDFAchintya SarkarPas encore d'évaluation
- Lecture 05 Unit1 PDFDocument11 pagesLecture 05 Unit1 PDFAchintya SarkarPas encore d'évaluation
- Lecture 01 03 Unit1Document19 pagesLecture 01 03 Unit1Achintya SarkarPas encore d'évaluation
- Fligbt Data Com-Patibility Check Using Bfgs Under Limited Measurements Through Multi-Sensor Data FusionDocument9 pagesFligbt Data Com-Patibility Check Using Bfgs Under Limited Measurements Through Multi-Sensor Data FusionAchintya SarkarPas encore d'évaluation
- Estimation Before Modeling Approach (EBM) : (Aerodynamic Parameters Estimation of Tactical Flight Vehicles)Document57 pagesEstimation Before Modeling Approach (EBM) : (Aerodynamic Parameters Estimation of Tactical Flight Vehicles)Achintya Sarkar100% (1)
- Comparison of The Radar and Seeker Modes of Pursuer Guidance AIAA-40404-588Document9 pagesComparison of The Radar and Seeker Modes of Pursuer Guidance AIAA-40404-588Achintya SarkarPas encore d'évaluation
- Sarkar Presentation 03Document96 pagesSarkar Presentation 03Achintya Sarkar0% (2)
- Integration of GPS and INS Data and Different Types of CouplingDocument55 pagesIntegration of GPS and INS Data and Different Types of CouplingAchintya SarkarPas encore d'évaluation
- Introduction To GPS and Determination of Receiver PositionDocument58 pagesIntroduction To GPS and Determination of Receiver PositionAchintya SarkarPas encore d'évaluation
- Missile Guidance Lecture 2 Covers INS Errors GPSDocument58 pagesMissile Guidance Lecture 2 Covers INS Errors GPSAchintya SarkarPas encore d'évaluation
- Sarkar Presentation 01Document84 pagesSarkar Presentation 01Achintya SarkarPas encore d'évaluation
- 02.23 - Lifeboat EngineDocument4 pages02.23 - Lifeboat EngineKANISHK KOHLIPas encore d'évaluation
- P12 PWM PSTDocument3 pagesP12 PWM PSTlokkythorPas encore d'évaluation
- Embedded Systems Model Question PaperDocument6 pagesEmbedded Systems Model Question PaperSubramanyaAIyerPas encore d'évaluation
- New Plan-Mithram: Tariff DetailsDocument3 pagesNew Plan-Mithram: Tariff DetailsvipinvnuPas encore d'évaluation
- 0417 m15 QP 12, JDocument16 pages0417 m15 QP 12, JlsorourPas encore d'évaluation
- Design and Costing of 3kW Home Solar PlantDocument2 pagesDesign and Costing of 3kW Home Solar Plant002Pradeep002Pas encore d'évaluation
- Suggested Service TimesDocument246 pagesSuggested Service TimesKot878Pas encore d'évaluation
- Cares Technical Approval TA1-A 5050: AnconDocument14 pagesCares Technical Approval TA1-A 5050: AnconFederico.IoriPas encore d'évaluation
- Current Trends and Issues in ITDocument30 pagesCurrent Trends and Issues in ITPol50% (2)
- Xyn464032-A4695, Schematic of Cooler ControlDocument23 pagesXyn464032-A4695, Schematic of Cooler ControlmaheshPas encore d'évaluation
- PanKnob ManualDocument8 pagesPanKnob ManualJohnPas encore d'évaluation
- IntroQRM Verjan2019Document73 pagesIntroQRM Verjan2019Jeffrey RamosPas encore d'évaluation
- Anatomy of Map Reduce Job RunDocument20 pagesAnatomy of Map Reduce Job RunHanumanthu GouthamiPas encore d'évaluation
- Biometric Based Classroom AttendenceDocument19 pagesBiometric Based Classroom AttendenceAnonymous hynO2soPas encore d'évaluation
- Fuel Systems and Engine ComponentsDocument27 pagesFuel Systems and Engine ComponentsRam SaacePas encore d'évaluation
- TDR Allison Ex TR 50 03Document4 pagesTDR Allison Ex TR 50 03muhammad puatPas encore d'évaluation
- Car Sales and Inventory Store Project: FeaturesDocument3 pagesCar Sales and Inventory Store Project: FeaturesSanjay Choduhari0% (1)
- SINAMICS S120 Cabinet Modules Liquid Cooled en-USDocument412 pagesSINAMICS S120 Cabinet Modules Liquid Cooled en-USPeter_Phee_341Pas encore d'évaluation
- The Future History of Dissidence, Denis SenerDocument4 pagesThe Future History of Dissidence, Denis Senerdenissener100% (1)
- Perspectives of LiteracyDocument3 pagesPerspectives of LiteracyJoseph IcaonapoPas encore d'évaluation
- KSW01 SMDocument144 pagesKSW01 SMHenrique Marques0% (1)
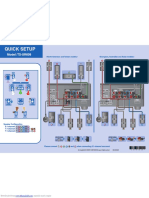
- Onkyo TX-SR608 Quick SetupDocument2 pagesOnkyo TX-SR608 Quick SetupCliff-Jacky ChengPas encore d'évaluation
- Bid Details - DhuleDocument1 pageBid Details - DhuleMurali GawandePas encore d'évaluation
- SACTIP-Q-001-05 Rev.01 Precast Concrete at Fabrication YardsDocument3 pagesSACTIP-Q-001-05 Rev.01 Precast Concrete at Fabrication YardsMuhammad AbrarPas encore d'évaluation