Vous aimerez peut-être aussi
- PID Control System Analysis and DesignDocument48 pagesPID Control System Analysis and DesignAsghar AliPas encore d'évaluation
- Basic Understanding of PID ControllersDocument9 pagesBasic Understanding of PID ControllersNimesh GunasekeraPas encore d'évaluation
- Lecture2 3Document25 pagesLecture2 3vrushalibhattPas encore d'évaluation
- PID Control TheoryDocument17 pagesPID Control TheoryManuel Santos MPas encore d'évaluation
- PID ControlDocument32 pagesPID ControlSyamil RahmanPas encore d'évaluation
- InTech-Pid Control TheoryDocument17 pagesInTech-Pid Control TheoryAbner BezerraPas encore d'évaluation
- App PIDDocument12 pagesApp PIDP Praveen KumarPas encore d'évaluation
- PracticalDocument10 pagesPracticalSec ArcPas encore d'évaluation
- Temperature Control Waterbath Control System Using PID ControllerDocument5 pagesTemperature Control Waterbath Control System Using PID ControllerReno Sandy YusufPas encore d'évaluation
- PID Controller Working Principle Explained For BeginnersDocument6 pagesPID Controller Working Principle Explained For BeginnersPramillaPas encore d'évaluation
- PID ControllerDocument24 pagesPID ControllerAliceAlormenuPas encore d'évaluation
- PID ControllersDocument6 pagesPID ControllersNguyễn HảiPas encore d'évaluation
- Design and Tuning of Fuzzy Logic PID ControllerDocument19 pagesDesign and Tuning of Fuzzy Logic PID ControllerPriya BhardwajPas encore d'évaluation
- 10 PIDControlKnospeDocument9 pages10 PIDControlKnospeOscar Ruiz SerranoPas encore d'évaluation
- Tuning of A PID Controller Using Ziegler-Nichols MethodDocument7 pagesTuning of A PID Controller Using Ziegler-Nichols MethodTomKish100% (1)
- The Working Principle of A PID Controller For BeginnersDocument15 pagesThe Working Principle of A PID Controller For BeginnersSaber AbdelaalPas encore d'évaluation
- PID Theory From WikipediaDocument7 pagesPID Theory From Wikipediaputra-tzuPas encore d'évaluation
- PID Robust Control Using Taguchi MethodDocument6 pagesPID Robust Control Using Taguchi MethodIsra Lemus SanchezPas encore d'évaluation
- 09 PID Control + CompensatorsDocument32 pages09 PID Control + Compensatorsomar hanyPas encore d'évaluation
- PIDDocument17 pagesPIDFlorian Pjetri100% (1)
- Pid Controller Without NoiseDocument10 pagesPid Controller Without NoisessleandroPas encore d'évaluation
- PID Controller: From Wikipedia, The Free EncyclopediaDocument17 pagesPID Controller: From Wikipedia, The Free EncyclopediatirupataiahxlPas encore d'évaluation
- Priyanka RajputDocument5 pagesPriyanka RajputajiePas encore d'évaluation
- Chapter Four 4.1 Controller (Selection, Tuning and Maintenance) A Proportional-Integral-Derivative ControllerDocument6 pagesChapter Four 4.1 Controller (Selection, Tuning and Maintenance) A Proportional-Integral-Derivative ControllerchdiPas encore d'évaluation
- Digital Pid Controller - 72S173Document15 pagesDigital Pid Controller - 72S173Pandimadevi GanesanPas encore d'évaluation
- PID Controller: From Wikipedia, The Free EncyclopediaDocument1 pagePID Controller: From Wikipedia, The Free EncyclopediaZhonPas encore d'évaluation
- Chapter 6 PIDDocument43 pagesChapter 6 PIDkibrom atsbhaPas encore d'évaluation
- Temperature Control Water Bath System Using PID ControllerDocument5 pagesTemperature Control Water Bath System Using PID Controllerprapya pokharelPas encore d'évaluation
- How Does A PID Controller Work - Structure & Tuning MethodsDocument12 pagesHow Does A PID Controller Work - Structure & Tuning Methodsmurugan1984Pas encore d'évaluation
- Sanji MIMO DissDocument3 pagesSanji MIMO DissSanjaya SrinathPas encore d'évaluation
- PID ControlDocument22 pagesPID ControlJessica RossPas encore d'évaluation
- A Review of PID Control Tuning Methods and ApplicationsDocument10 pagesA Review of PID Control Tuning Methods and Applicationsalex.yin.xjftPas encore d'évaluation
- Comparative Study of PID Tuning Methods For Processes With Large & Small Delay TimesDocument7 pagesComparative Study of PID Tuning Methods For Processes With Large & Small Delay TimesJuan Manuel Uceda PérezPas encore d'évaluation
- DetailsDocument1 pageDetailsAnjana SudarsananPas encore d'évaluation
- PID Control For TemperatureDocument3 pagesPID Control For TemperatureSathiya SeelanPas encore d'évaluation
- Temperature Controllers: Different PID EquationsDocument3 pagesTemperature Controllers: Different PID EquationsMahesh NaikPas encore d'évaluation
- PID ReportDocument38 pagesPID ReportNishiya Vijayan100% (1)
- Control Systems Lect. 4 PIDDocument65 pagesControl Systems Lect. 4 PIDhmaymadPas encore d'évaluation
- Chapter 4 - PID ControllerDocument62 pagesChapter 4 - PID ControllerHuy Nguyen LuongPas encore d'évaluation
- Chapter - 4 Control Configuration 4.1 Pid ControllerDocument8 pagesChapter - 4 Control Configuration 4.1 Pid ControllerMoorthy ManikandanPas encore d'évaluation
- PID ControllersDocument9 pagesPID Controllerszs94qjqcx7Pas encore d'évaluation
- Priprema Za Ispit 2Document8 pagesPriprema Za Ispit 2Aleksandar MicicPas encore d'évaluation
- PID Controller: Saturation and Anti WindupDocument2 pagesPID Controller: Saturation and Anti WindupAbhishek VermaPas encore d'évaluation
- EVMS Full Notes PDFDocument78 pagesEVMS Full Notes PDFNaveen DhanurajPas encore d'évaluation
- JSME - Volume 12 - Issue 4 - Pages 53-66Document14 pagesJSME - Volume 12 - Issue 4 - Pages 53-66Nguyễn Trung ThôngPas encore d'évaluation
- PID ControllerDocument15 pagesPID ControllerSalah El GhazaliPas encore d'évaluation
- Objective:: Experiment 9 PID ControllerDocument6 pagesObjective:: Experiment 9 PID ControllerSyamil RahmanPas encore d'évaluation
- 1 - 1 - IntroducaoDocument31 pages1 - 1 - IntroducaoAndré GomesPas encore d'évaluation
- Analog Control - 2nd LabDocument21 pagesAnalog Control - 2nd LabMohammad alhaboob2030Pas encore d'évaluation
- Lab11 - Autotuning PDFDocument26 pagesLab11 - Autotuning PDFEng. Ebrahim A. AlrohmiPas encore d'évaluation
- Lab11 - AutotuningDocument26 pagesLab11 - AutotuningEng. Ebrahim A. AlrohmiPas encore d'évaluation
- PIDControllerDocument42 pagesPIDControllerstephenPas encore d'évaluation
- IoCT2 SS Astrom 1 PDFDocument2 pagesIoCT2 SS Astrom 1 PDFAnonymous by1DIx6lhPas encore d'évaluation
- KrishiDocument3 pagesKrishiKrishi ChhedaPas encore d'évaluation
- PID ControllerDocument5 pagesPID ControllerAbhilash MallikarjunaPas encore d'évaluation
- Mesb333 Pid ControlDocument13 pagesMesb333 Pid ControlMohd KhairiPas encore d'évaluation
- Some Tuning Methods of PID ControllerDocument7 pagesSome Tuning Methods of PID ControllerChano HanokPas encore d'évaluation
- Universidad Politécnica Salesiana: Sistema de Control en Tiempo ContinuoDocument6 pagesUniversidad Politécnica Salesiana: Sistema de Control en Tiempo ContinuoAndres LozanoPas encore d'évaluation
- K25 - K26 - K27 - K28 - K29 - K30 - K31 - K32: - XT:417 - XT:418 - XT:419 - XT:420 - XT:421 - XT:422 - XT:423 - XT:424Document1 pageK25 - K26 - K27 - K28 - K29 - K30 - K31 - K32: - XT:417 - XT:418 - XT:419 - XT:420 - XT:421 - XT:422 - XT:423 - XT:424Sunil SinghPas encore d'évaluation
- Incomer 2,16MVADocument3 pagesIncomer 2,16MVASunil SinghPas encore d'évaluation
- 6.6KV Cico VCB Panel Board, Scheme PDFDocument8 pages6.6KV Cico VCB Panel Board, Scheme PDFSunil SinghPas encore d'évaluation
- Siemens S7 200Document28 pagesSiemens S7 200Sunil SinghPas encore d'évaluation
- Tuning Workshop PID Controllers: Shell Global SolutionsDocument33 pagesTuning Workshop PID Controllers: Shell Global SolutionsSunil SinghPas encore d'évaluation
- 11.5. Efficiency of Inverters - EME 812 - Utility Solar Power and Concentration PDFDocument5 pages11.5. Efficiency of Inverters - EME 812 - Utility Solar Power and Concentration PDFSunil SinghPas encore d'évaluation
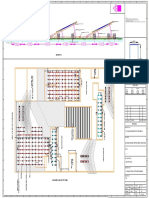
- Ga Drawing For Ballast Structure 30kwDocument1 pageGa Drawing For Ballast Structure 30kwSunil SinghPas encore d'évaluation
- Substation Earthing Design: Akshay PatilDocument6 pagesSubstation Earthing Design: Akshay PatilSunil SinghPas encore d'évaluation
- 11.5. Efficiency of Inverters - EME 812 - Utility Solar Power and Concentration PDFDocument5 pages11.5. Efficiency of Inverters - EME 812 - Utility Solar Power and Concentration PDFSunil SinghPas encore d'évaluation
- Photo Voltaic Plant Routine Operation & Maintenance Manual: Prepared By-Sunil Singh (DGM D&E)Document7 pagesPhoto Voltaic Plant Routine Operation & Maintenance Manual: Prepared By-Sunil Singh (DGM D&E)Sunil SinghPas encore d'évaluation
- GUIDE BOOK ISIF 2020-ReducedDocument20 pagesGUIDE BOOK ISIF 2020-ReducedImamPas encore d'évaluation
- Zapf 1999Document32 pagesZapf 1999Kashif Munir IdreesiPas encore d'évaluation
- Shorewood School Reopening Plan - FINAL 7.24Document48 pagesShorewood School Reopening Plan - FINAL 7.24TMJ4 NewsPas encore d'évaluation
- Child Friendly School System (CFSS) ChecklistDocument4 pagesChild Friendly School System (CFSS) ChecklistDivine Grace Samortin91% (45)
- Exploring Brand Hate and The Association Between Similar Competitor Offer and Brand Equity: A Moderated-Mediation ModelDocument15 pagesExploring Brand Hate and The Association Between Similar Competitor Offer and Brand Equity: A Moderated-Mediation Modelabir143Pas encore d'évaluation
- Republic Act No. 7836 Philippine Teachers Professionalization Act of 1994Document3 pagesRepublic Act No. 7836 Philippine Teachers Professionalization Act of 1994Hazel Recites BernaldezPas encore d'évaluation
- Epicurus On Pleasure and The Complete LifeDocument21 pagesEpicurus On Pleasure and The Complete LifeclaudiaPas encore d'évaluation
- Soyarslan, PHD Dissertation, Duke 2011, Reason and Intuitive Knowledge in Spinoza's EthicsDocument337 pagesSoyarslan, PHD Dissertation, Duke 2011, Reason and Intuitive Knowledge in Spinoza's EthicsFranciscoPas encore d'évaluation
- BEHAVIORISM - Villaran, John Lawrence H.Document9 pagesBEHAVIORISM - Villaran, John Lawrence H.John Lawrence Villaran100% (1)
- IntroductionDocument127 pagesIntroductiondiona macasaquitPas encore d'évaluation
- Kathlyn Tajada ACTIVITY 3 Acctg. 321Document10 pagesKathlyn Tajada ACTIVITY 3 Acctg. 321Kathlyn TajadaPas encore d'évaluation
- Stages/ Time Content Activities Resource Set Induction (5 Minutes)Document2 pagesStages/ Time Content Activities Resource Set Induction (5 Minutes)Zechrist ZechariahPas encore d'évaluation
- TTLG Proficiency ArgumentDocument3 pagesTTLG Proficiency Argumentapi-546255049Pas encore d'évaluation
- Bertrand RussellDocument23 pagesBertrand RussellNikhil LallPas encore d'évaluation
- The Four Pillars of ESP 2Document14 pagesThe Four Pillars of ESP 2Lucas VieraPas encore d'évaluation
- Drafting Is The Preliminary Stage of A Written Work in Which The Author Begins To Develop ADocument19 pagesDrafting Is The Preliminary Stage of A Written Work in Which The Author Begins To Develop AAansa MalikPas encore d'évaluation
- English Unit 5 Lesson 1-2 Forecasts February 11TH. To Feb. 25THDocument7 pagesEnglish Unit 5 Lesson 1-2 Forecasts February 11TH. To Feb. 25THmultiservicios pcPas encore d'évaluation
- Variables in ResearchDocument30 pagesVariables in Researchzorrotran100% (2)
- Training Completion Report Teachers' Capability WorkshopDocument16 pagesTraining Completion Report Teachers' Capability WorkshopMARIA THERESA M. HERBOLINGOPas encore d'évaluation
- Slides Unit 04 ManagementDocument65 pagesSlides Unit 04 ManagementJavier Grau PerellóPas encore d'évaluation
- Pandemic Designs For The Future: Perspectives of Technology Education Teachers During COVID-19Document13 pagesPandemic Designs For The Future: Perspectives of Technology Education Teachers During COVID-19Zeeshan KhanPas encore d'évaluation
- Lesson 2Document10 pagesLesson 2Roger Ursulum RaquiñoPas encore d'évaluation
- The Methodology of Organizational Diagnosis - Clayton. P. AlderferDocument10 pagesThe Methodology of Organizational Diagnosis - Clayton. P. AlderferRifa AratikaPas encore d'évaluation
- 4a's Shielding The Body From Communicable Disease InvadersDocument1 page4a's Shielding The Body From Communicable Disease InvadersJesMae CastlePas encore d'évaluation
- Barkada Kontra Droga Action PlanDocument1 pageBarkada Kontra Droga Action PlanMa. Lina Ondoy100% (2)
- Technical Skills Are All That Is Necessary To Be A Successful EngineerDocument3 pagesTechnical Skills Are All That Is Necessary To Be A Successful EngineerkaranPas encore d'évaluation
- Final Examination - Short Story (Pelecio, Jhaia)Document3 pagesFinal Examination - Short Story (Pelecio, Jhaia)elianaPas encore d'évaluation
- Oralcom11 q2 Mod5 FINALDocument22 pagesOralcom11 q2 Mod5 FINALBay-as OlagetPas encore d'évaluation
- Cultural Communication Barriers in The WorkplaceDocument4 pagesCultural Communication Barriers in The WorkplaceHoroba DanielPas encore d'évaluation
- August 29Document3 pagesAugust 29Richelle LegaspiPas encore d'évaluation