Vous aimerez peut-être aussi
- Control Systems (CS) : Lecture-2 Laplace Transform Transfer Function and Stability of LTI SystemsDocument41 pagesControl Systems (CS) : Lecture-2 Laplace Transform Transfer Function and Stability of LTI Systemskamranzeb057Pas encore d'évaluation
- Transfer FunctionDocument36 pagesTransfer FunctionChamitha MadushanPas encore d'évaluation
- Feedback Exam ReviewerDocument5 pagesFeedback Exam ReviewerShania LoveresPas encore d'évaluation
- 03 01 Laplace Transforms Slides HandoutDocument57 pages03 01 Laplace Transforms Slides HandoutXavimVXS100% (2)
- Fourier Series MATLAB GUI P-Code Doc 011905Document7 pagesFourier Series MATLAB GUI P-Code Doc 011905Julio FerreiraPas encore d'évaluation
- Transfer Functions and Block Diagrams PDFDocument21 pagesTransfer Functions and Block Diagrams PDFJuliana NepembePas encore d'évaluation
- First Order SystemsDocument40 pagesFirst Order SystemsWaqas SaghirPas encore d'évaluation
- Lecture Signal Flow GraphsDocument56 pagesLecture Signal Flow GraphsFahadKhPas encore d'évaluation
- Laplace TransformDocument32 pagesLaplace TransformamanPas encore d'évaluation
- Control System - Closed Loop Open Loop Control SystemDocument9 pagesControl System - Closed Loop Open Loop Control SystemSiva B PositivePas encore d'évaluation
- Module 2 Laplace TransformsDocument36 pagesModule 2 Laplace TransformsErnie Mark Patosa MaratasPas encore d'évaluation
- Lecture 1Document22 pagesLecture 1Edabel Jane FalcasantosPas encore d'évaluation
- Fluid MechanicsDocument25 pagesFluid MechanicsforzamaPas encore d'évaluation
- Application of Laplace Transform in ControlsDocument31 pagesApplication of Laplace Transform in ControlshportezPas encore d'évaluation
- Math - Sequences, Series and Partial Fraction (Solution)Document4 pagesMath - Sequences, Series and Partial Fraction (Solution)Janjeremy2885Pas encore d'évaluation
- Datta Meghe College of Engineering, AiroliDocument39 pagesDatta Meghe College of Engineering, AiroliMayuri patilPas encore d'évaluation
- Experiment 4Document5 pagesExperiment 4verbosePas encore d'évaluation
- Design of Compensators Using Root Locus DiagramDocument20 pagesDesign of Compensators Using Root Locus DiagramAhmed ElbadrawiPas encore d'évaluation
- Transfer Function of Electrical and Mechanical SystemsDocument21 pagesTransfer Function of Electrical and Mechanical SystemsWigmar GonzalezPas encore d'évaluation
- Inverse LaplaceDocument19 pagesInverse LaplaceSudeep KharePas encore d'évaluation
- Bio OxidationDocument21 pagesBio OxidationManu Jain100% (2)
- Radiation View Factors and TransferDocument29 pagesRadiation View Factors and Transfernauman khanPas encore d'évaluation
- Applications of Laplace Transform Unit Step Functions and Dirac Delta FunctionsDocument8 pagesApplications of Laplace Transform Unit Step Functions and Dirac Delta FunctionsJASH MATHEWPas encore d'évaluation
- Relaxation Method 2012Document46 pagesRelaxation Method 2012Akqueza MendonçaPas encore d'évaluation
- Inverse Square Law of HeatDocument9 pagesInverse Square Law of HeatAl Drexie BasadrePas encore d'évaluation
- Fourier's Law and the Heat Diffusion EquationDocument34 pagesFourier's Law and the Heat Diffusion EquationrafsanPas encore d'évaluation
- Application of Numerical Methods in Chemical EngineeringDocument11 pagesApplication of Numerical Methods in Chemical EngineeringSuleman Tariq100% (3)
- Fluid Statics PDFDocument9 pagesFluid Statics PDFratnabooksPas encore d'évaluation
- Thermodynamics Multiple Choice ReviewDocument26 pagesThermodynamics Multiple Choice ReviewWillina Marie Chong MablePas encore d'évaluation
- Transfer Functions & Block DiagramsDocument8 pagesTransfer Functions & Block DiagramsHyunjoo MaengPas encore d'évaluation
- Circuit Analysis using Laplace Transform ExplainedDocument33 pagesCircuit Analysis using Laplace Transform ExplainedhafidahnsPas encore d'évaluation
- ENGINEERING ECONOMY METHODSDocument11 pagesENGINEERING ECONOMY METHODSJune CostalesPas encore d'évaluation
- Feedback and Control System - Quiz 1Document3 pagesFeedback and Control System - Quiz 1Divine Chrystelle M. GonzalvoPas encore d'évaluation
- Advance ThermodynamicsDocument61 pagesAdvance ThermodynamicsGunjan AgrahariPas encore d'évaluation
- Control Engineering PDFDocument164 pagesControl Engineering PDFsanthoshramrPas encore d'évaluation
- Chapter 1 IntroductionDocument9 pagesChapter 1 IntroductionNikko ManalesePas encore d'évaluation
- Lecture Time Domain Analysis of 2nd Order SystemsDocument12 pagesLecture Time Domain Analysis of 2nd Order SystemsFahadKhPas encore d'évaluation
- Block Diagram Reduction Guide for Control SystemsDocument85 pagesBlock Diagram Reduction Guide for Control SystemsAparna ViswanathPas encore d'évaluation
- Modeling Dynamic SystemsDocument48 pagesModeling Dynamic SystemssepehrPas encore d'évaluation
- Control Engineering I PDFDocument15 pagesControl Engineering I PDFkipkorir kemboiPas encore d'évaluation
- Laplace and Its Inverse Transform - Unit - Iii - Iv MaterialsDocument49 pagesLaplace and Its Inverse Transform - Unit - Iii - Iv MaterialsSupratim RoyPas encore d'évaluation
- Graphical solution of equilibrium and energy balance equationsDocument24 pagesGraphical solution of equilibrium and energy balance equationsblackbeauty14100% (1)
- GATE Tutor (ME) - Heat&Mass Transfer 1Document30 pagesGATE Tutor (ME) - Heat&Mass Transfer 1SabariMechy0% (1)
- Process Dynamics and Control Week Seven Block AlgebraDocument73 pagesProcess Dynamics and Control Week Seven Block AlgebraCristian Mateo Ovalle CifuentesPas encore d'évaluation
- Laplace Transforms - Practice QuestionsDocument4 pagesLaplace Transforms - Practice QuestionsBala KumarPas encore d'évaluation
- K Calibration of Venturi and Orifice MetersDocument13 pagesK Calibration of Venturi and Orifice MetersKitty VPas encore d'évaluation
- Design and Implementation Speed Control System of PDFDocument8 pagesDesign and Implementation Speed Control System of PDFvince kafuaPas encore d'évaluation
- ME495 Lab - Plate Heat Exchanger - Expt Number 5Document5 pagesME495 Lab - Plate Heat Exchanger - Expt Number 5Kammy LaiPas encore d'évaluation
- rr320803 Process Dynamics and ControlDocument6 pagesrr320803 Process Dynamics and ControlSRINIVASA RAO GANTAPas encore d'évaluation
- Lecture 8 - Thermodynamic Potentials, Gibbs Free Energy, Etc-1Document61 pagesLecture 8 - Thermodynamic Potentials, Gibbs Free Energy, Etc-1BENPas encore d'évaluation
- Process Control Lab ManualDocument30 pagesProcess Control Lab ManualAkash Sundar50% (2)
- UWE Bristol: Lecture 4: Second Order Time Response and The Block Diagram ApproachDocument26 pagesUWE Bristol: Lecture 4: Second Order Time Response and The Block Diagram ApproachYahya NaeemPas encore d'évaluation
- Applied Chemical Engineering CalculationsDocument7 pagesApplied Chemical Engineering Calculationsmbolantenaina100% (1)
- First and Second Order SystemsDocument13 pagesFirst and Second Order SystemsGoutham HerePas encore d'évaluation
- Feedback Control Systems (FCS) : Lecture-2 Transfer Function and Stability of LTI SystemsDocument29 pagesFeedback Control Systems (FCS) : Lecture-2 Transfer Function and Stability of LTI SystemsRomadhonFitriyantoPas encore d'évaluation
- Control Systems (CS) : Lecture-2 Transfer Function and Stability of LTI SystemsDocument35 pagesControl Systems (CS) : Lecture-2 Transfer Function and Stability of LTI SystemsAdil KhanPas encore d'évaluation
- Feedback Control Systems (FCS) : Lecture-3 & 4 Transfer Function and Stability of LTI SystemsDocument30 pagesFeedback Control Systems (FCS) : Lecture-3 & 4 Transfer Function and Stability of LTI SystemsZaheer AhamedPas encore d'évaluation
- Lecture-2 Transfer FunctionDocument32 pagesLecture-2 Transfer FunctionMuneeb JawaidPas encore d'évaluation
- Transfer Function Basics & Transfer Function and StabilityDocument31 pagesTransfer Function Basics & Transfer Function and StabilityArvind kumar PrajapatiPas encore d'évaluation
- The Spectral Theory of Toeplitz Operators. (AM-99), Volume 99D'EverandThe Spectral Theory of Toeplitz Operators. (AM-99), Volume 99Pas encore d'évaluation
- UN 9252-06 Part 1-UD-AU-000-EB-00020 PDFDocument7 pagesUN 9252-06 Part 1-UD-AU-000-EB-00020 PDFManjeet SainiPas encore d'évaluation
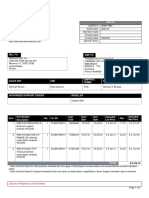
- Quote: Quotation Prepared By: Sloan SellersDocument2 pagesQuote: Quotation Prepared By: Sloan SellersRubén CastañoPas encore d'évaluation
- Quenching & TemperingDocument4 pagesQuenching & Temperingkgkganesh8116Pas encore d'évaluation
- X English QPDocument29 pagesX English QPbadasserytechPas encore d'évaluation
- 2016 Book IrrigationAndDrainageEngineeriDocument747 pages2016 Book IrrigationAndDrainageEngineeriJesús Garre Ruiz100% (2)
- Prediction On Miss Mamta Banerjee Honorable CM of West Bengal Much Much Before Result and Election by Indranil RayDocument24 pagesPrediction On Miss Mamta Banerjee Honorable CM of West Bengal Much Much Before Result and Election by Indranil RayIndranil RayPas encore d'évaluation
- Gpee6.0T01Tibbgde: Technical Data SheetDocument2 pagesGpee6.0T01Tibbgde: Technical Data SheetHope SangoPas encore d'évaluation
- Lind 18e Chap005Document35 pagesLind 18e Chap005MELLYANA JIEPas encore d'évaluation
- DCP-L2550DW BrochureDocument2 pagesDCP-L2550DW BrochureKaren CariagaPas encore d'évaluation
- Pengadaan Obat Dan Alkes TGL 22 April 2021 Klinik PembantuDocument8 pagesPengadaan Obat Dan Alkes TGL 22 April 2021 Klinik PembantuIsma Prasetya WardaniPas encore d'évaluation
- Sheet No. 1: Roop LalDocument6 pagesSheet No. 1: Roop LalzzzPas encore d'évaluation
- Suffolk Bus S92 Schedule Effective 5-2712Document2 pagesSuffolk Bus S92 Schedule Effective 5-2712RiverheadLOCAL67% (6)
- PNR Status. - Train Details: Number Name Class QuotaDocument1 pagePNR Status. - Train Details: Number Name Class QuotaPranshuPas encore d'évaluation
- Bing WorksheetDocument3 pagesBing WorksheetFrutti MataniPas encore d'évaluation
- 660 Inventions That Changed Our WorldDocument5 pages660 Inventions That Changed Our WorldKoby RamosPas encore d'évaluation
- Axle, Front Drive - Housing, Swivel PDFDocument2 pagesAxle, Front Drive - Housing, Swivel PDFLeo VegaPas encore d'évaluation
- Western Preços - SPDocument28 pagesWestern Preços - SPRobertaoJasperPas encore d'évaluation
- Medical WaiverDocument1 pageMedical WaiverCheerBUPas encore d'évaluation
- Bursting and Collapsing Pressures of ASTM A312 Stainless Steel PipesDocument1 pageBursting and Collapsing Pressures of ASTM A312 Stainless Steel PipesManuKumarMittalPas encore d'évaluation
- Accountability Report Ba CharityDocument24 pagesAccountability Report Ba CharityBintang sonda sitorus PanePas encore d'évaluation
- CSAT 2019 Spe3D Duguid - Andrew PDFDocument111 pagesCSAT 2019 Spe3D Duguid - Andrew PDFdocturboPas encore d'évaluation
- 4 Compass SurveyingDocument10 pages4 Compass SurveyingSuson DhitalPas encore d'évaluation
- Calibration Procedure Crowcon Xgard Gas Detectors - 5720273 - 01Document16 pagesCalibration Procedure Crowcon Xgard Gas Detectors - 5720273 - 01Daniel Rolando Gutierrez FuentesPas encore d'évaluation
- Service Manual: PN-2474B-A PN-2475D-A PN-2475F-A PN-2475F-BDocument12 pagesService Manual: PN-2474B-A PN-2475D-A PN-2475F-A PN-2475F-BMahmoud ElrefaeyPas encore d'évaluation
- Personal Data Form: World English Placement Test Package Photocopiable © 2011 Heinle, Cengage LearningDocument2 pagesPersonal Data Form: World English Placement Test Package Photocopiable © 2011 Heinle, Cengage Learningadri shimizuPas encore d'évaluation
- 7 ReferencesDocument6 pages7 Referencessuneerav17100% (1)
- Classic Text Messages Morning GreetingsDocument2 pagesClassic Text Messages Morning GreetingsDhamukarthikeyanPas encore d'évaluation
- Laptop Chip Level CourseDocument2 pagesLaptop Chip Level CourselghmshariPas encore d'évaluation
- DS 1Document23 pagesDS 1aayush bhatiaPas encore d'évaluation
- Speech Language Impairment - Eduu 511Document15 pagesSpeech Language Impairment - Eduu 511api-549169454Pas encore d'évaluation