Vous aimerez peut-être aussi
- Computational Geomechanics With Special Reference To Earthquake EngineeringDocument395 pagesComputational Geomechanics With Special Reference To Earthquake EngineeringRomarioSebastian100% (2)
- Chapter 2Document14 pagesChapter 2Anggie AceroPas encore d'évaluation
- STI0802 Drucker PragerDocument4 pagesSTI0802 Drucker Pragertinchofran100% (1)
- Chapter 5Document10 pagesChapter 5Young BrotherPas encore d'évaluation
- Frame Analysis Byfinite Element Method: Finite Element Method by G. R. Liu and S. S. QuekDocument29 pagesFrame Analysis Byfinite Element Method: Finite Element Method by G. R. Liu and S. S. QuekananiaPas encore d'évaluation
- Frame Analysis Byfinite ElementDocument38 pagesFrame Analysis Byfinite Elementtesfaye gurmesaPas encore d'évaluation
- Chapter 6Document38 pagesChapter 6NEBIYU AYDAGNUHIM TADESSEPas encore d'évaluation
- Gaussian MLEstimatorDocument42 pagesGaussian MLEstimatorSlim SalimPas encore d'évaluation
- Lecture 10 - Particles in 3D Box and Hydrogen AtomDocument28 pagesLecture 10 - Particles in 3D Box and Hydrogen AtomArc ZeroPas encore d'évaluation
- Fundamentals For Finite Element MethodDocument34 pagesFundamentals For Finite Element MethodnaderPas encore d'évaluation
- B.E./B.Tech. Degree Examinations, November/December 2016: Find The Unit Normal To at (1, 1,-1)Document26 pagesB.E./B.Tech. Degree Examinations, November/December 2016: Find The Unit Normal To at (1, 1,-1)B Vignesh BabuPas encore d'évaluation
- Kalvek8 PDFDocument2 pagesKalvek8 PDFAnonymous pHKp0zdWqPas encore d'évaluation
- BA224 Lec 8Document17 pagesBA224 Lec 8selimhany10107575Pas encore d'évaluation
- MAT104E21YFDocument7 pagesMAT104E21YFDisney DisneyPas encore d'évaluation
- 4NodeQuad PDFDocument27 pages4NodeQuad PDFMarvinEboraPas encore d'évaluation
- 18mab102t Tutorial 3Document1 page18mab102t Tutorial 3Rohan MohataPas encore d'évaluation
- ME 8692 FEA - WatermarkDocument126 pagesME 8692 FEA - WatermarkDHARMADURAI.P MEC-AP/AEROPas encore d'évaluation
- Lecture 5: The Electric Potential and The Method of ImagesDocument12 pagesLecture 5: The Electric Potential and The Method of Imagessamer saeedPas encore d'évaluation
- IMP 2 Marks With AnswersDocument6 pagesIMP 2 Marks With AnswersvimalPas encore d'évaluation
- Phys 1 Memo Vizsga 2012Document14 pagesPhys 1 Memo Vizsga 2012BlazsPas encore d'évaluation
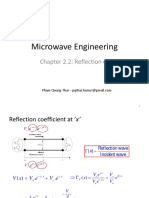
- Microwave Engineering: Chapter 2.2: Reflection CoefficientDocument14 pagesMicrowave Engineering: Chapter 2.2: Reflection CoefficientLê NamPas encore d'évaluation
- Electric - Flux - GaussDiv (2017 - 06 - 19 10 - 00 - 14 UTC)Document35 pagesElectric - Flux - GaussDiv (2017 - 06 - 19 10 - 00 - 14 UTC)Tristan Nicholai Fernandez YambaoPas encore d'évaluation
- Introduction To NanophotonicsDocument49 pagesIntroduction To NanophotonicsArashiPas encore d'évaluation
- FALLSEM2019-20 PHY1701 ETH VL2019201005716 Reference Material I 06-Aug-2019 Particle in A 3D BoxDocument6 pagesFALLSEM2019-20 PHY1701 ETH VL2019201005716 Reference Material I 06-Aug-2019 Particle in A 3D BoxMajety S LskshmiPas encore d'évaluation
- FALLSEM2020-21 PHY1701 ETH VL2020210105348 Reference Material I 23-Nov-2020 Particle in A 3D BoxDocument6 pagesFALLSEM2020-21 PHY1701 ETH VL2020210105348 Reference Material I 23-Nov-2020 Particle in A 3D BoxDEEPIKA PAVUNDOSS 20BEC0285Pas encore d'évaluation
- Tutorial 2Document10 pagesTutorial 2Faris HishamPas encore d'évaluation
- Chapter 4 Selected Topics For Circuits and Systems: 4-1 Poisson's and Laplace's EquationsDocument20 pagesChapter 4 Selected Topics For Circuits and Systems: 4-1 Poisson's and Laplace's Equations123 georgePas encore d'évaluation
- 02c. Integration of VectorDocument19 pages02c. Integration of VectorYudha AgungPas encore d'évaluation
- 3.1-3.2 Laplace - S EquationDocument15 pages3.1-3.2 Laplace - S EquationCargo86Pas encore d'évaluation
- Lecture 12Document23 pagesLecture 12fffPas encore d'évaluation
- Beam and FramesDocument70 pagesBeam and Framesbhetuwalamrit17Pas encore d'évaluation
- Tutorial Sheet - 3 (Multiple Integrals)Document3 pagesTutorial Sheet - 3 (Multiple Integrals)Dipankar NathPas encore d'évaluation
- Chpt03 Mabel Fem For TrussesDocument33 pagesChpt03 Mabel Fem For TrussesgagagaPas encore d'évaluation
- Electric Flux Density, Gauss's Law, and DivergenceDocument40 pagesElectric Flux Density, Gauss's Law, and DivergenceJiyuPas encore d'évaluation
- Differential Calculus and Integral CalculusDocument28 pagesDifferential Calculus and Integral CalculusEmpreomPas encore d'évaluation
- Lecture 24 - ExpectationDocument20 pagesLecture 24 - ExpectationRoshan SoniPas encore d'évaluation
- Subject:-Fem: Topic Galerkin'sDocument15 pagesSubject:-Fem: Topic Galerkin'sSachin KumarPas encore d'évaluation
- $R9NBKVPDocument9 pages$R9NBKVPXhoniPas encore d'évaluation
- CLASSICAL PDEs Summarized.Document20 pagesCLASSICAL PDEs Summarized.mukiibiPas encore d'évaluation
- Universidad Nacional de CajamarcaDocument6 pagesUniversidad Nacional de Cajamarcavictor hugoPas encore d'évaluation
- PH 201 Optics & Lasers: Lec - Fresnel Diffraction - 2Document22 pagesPH 201 Optics & Lasers: Lec - Fresnel Diffraction - 2Selvi RPas encore d'évaluation
- Awesome Formula SheetDocument12 pagesAwesome Formula Sheetsurendranath jadhavPas encore d'évaluation
- Slide chpt04Document27 pagesSlide chpt04shambel kipPas encore d'évaluation
- I2ml3e Chap6Document37 pagesI2ml3e Chap6EMS Metalworking MachineryPas encore d'évaluation
- EE2001D - Unit - 7-Maxwell's Equations PDFDocument40 pagesEE2001D - Unit - 7-Maxwell's Equations PDFbenson215Pas encore d'évaluation
- Indian Institute of Science: RoblemDocument2 pagesIndian Institute of Science: RoblemADSTE ETWPas encore d'évaluation
- IMP 5 Marks With AnswersDocument9 pagesIMP 5 Marks With AnswersvimalPas encore d'évaluation
- Ece I YearDocument48 pagesEce I Yearpodixa7774Pas encore d'évaluation
- Solution LaplaceDocument104 pagesSolution LaplaceRanko KamilPas encore d'évaluation
- 2018 Iiipaper 336Document4 pages2018 Iiipaper 336KaustubhPas encore d'évaluation
- Thvi 4Document29 pagesThvi 4oigres725Pas encore d'évaluation
- Lecture Rectangular WaveguideDocument34 pagesLecture Rectangular WaveguideBill WhitePas encore d'évaluation
- Practice Test 03 - Test Paper - Saakaar Batch For IIT JAM MathematicsDocument9 pagesPractice Test 03 - Test Paper - Saakaar Batch For IIT JAM MathematicsPrity KumariPas encore d'évaluation
- Lecture - 2: One-Dimensional AnalysisDocument38 pagesLecture - 2: One-Dimensional AnalysisGooftilaaAniJiraachuunkooYesusiinPas encore d'évaluation
- Poisson's and Laplace's Equations and Their UsesDocument14 pagesPoisson's and Laplace's Equations and Their UsesMadiha Zia KhattakPas encore d'évaluation
- ACS Assignment-IIIDocument1 pageACS Assignment-IIIharshit playboyPas encore d'évaluation
- Experiment III Transmission LinesDocument10 pagesExperiment III Transmission LinesJoseGarciaRuizPas encore d'évaluation
- Design Charts For Clamped Orthotropic PlatesDocument9 pagesDesign Charts For Clamped Orthotropic PlatesJuan CarlosPas encore d'évaluation
- Differentiation and The Derivative: Derivative. If We Differentiate The First Derivative, We Arrive at A New FunctionDocument27 pagesDifferentiation and The Derivative: Derivative. If We Differentiate The First Derivative, We Arrive at A New FunctionsudhadeepaPas encore d'évaluation
- Triple Integration Its Applications Integral CalculusDocument29 pagesTriple Integration Its Applications Integral Calculusshashi1990sawPas encore d'évaluation
- Formulario de Cálculo Diferencial CICLO 2018-B Primer ParcialDocument6 pagesFormulario de Cálculo Diferencial CICLO 2018-B Primer ParcialRique RosPas encore d'évaluation
- Tables of the Function w (z)- e-z2 ? ex2 dx: Mathematical Tables Series, Vol. 27D'EverandTables of the Function w (z)- e-z2 ? ex2 dx: Mathematical Tables Series, Vol. 27Pas encore d'évaluation
- L3 - Design Against Static Load-2Document13 pagesL3 - Design Against Static Load-2Dhyan PatelPas encore d'évaluation
- Tri-Axial Design MethodDocument9 pagesTri-Axial Design Methodcat buenafePas encore d'évaluation
- Different Approaches in Modeling of RC Shear Wall: A ReviewDocument15 pagesDifferent Approaches in Modeling of RC Shear Wall: A Reviewrahimmulla100% (2)
- Complete English Grammar RulesDocument4 pagesComplete English Grammar RulesgurueinnelPas encore d'évaluation
- Mechanical Properties of Materials PDFDocument126 pagesMechanical Properties of Materials PDFNazario Emil LintagPas encore d'évaluation
- Kaunas University of Technology: Mechanical Engineering and Design FacultyDocument78 pagesKaunas University of Technology: Mechanical Engineering and Design FacultyvsPas encore d'évaluation
- Course Code: Physics - E Course Description: Pysics For Egieers (Calculus-Based) Mudule 8Document15 pagesCourse Code: Physics - E Course Description: Pysics For Egieers (Calculus-Based) Mudule 8Nathaniel ClementePas encore d'évaluation
- Ca1 - Tme205-03-2023Document6 pagesCa1 - Tme205-03-2023Charls zaviorPas encore d'évaluation
- Buckling of Shells Proceedings of A State of The Art Colloquium Universit T Stuttgart Germany May 6-7-1982Document665 pagesBuckling of Shells Proceedings of A State of The Art Colloquium Universit T Stuttgart Germany May 6-7-1982Mohammed Essam ShatnawiPas encore d'évaluation
- Structural Response of Composite BeamsDocument28 pagesStructural Response of Composite BeamsRamprasad SrinivasanPas encore d'évaluation
- The Effect of Hydrostatic Pressure On The Mechanical Properties of Glass Fibre/epoxy Unidirectional CompositesDocument11 pagesThe Effect of Hydrostatic Pressure On The Mechanical Properties of Glass Fibre/epoxy Unidirectional CompositesMartín KunuschPas encore d'évaluation
- 7-Buckling of Columns-AsgnDocument11 pages7-Buckling of Columns-AsgnMohdYasirPas encore d'évaluation
- Geogrid Mechanism in Low-Volume Flexible Pavements Accelerated Testing of Full-Scale Heavily Instrumented Pavement SectionsDocument16 pagesGeogrid Mechanism in Low-Volume Flexible Pavements Accelerated Testing of Full-Scale Heavily Instrumented Pavement SectionsjrasaitananPas encore d'évaluation
- Nonlinear Static Analysis of Cole-Stayed Bridge StfwcivresDocument15 pagesNonlinear Static Analysis of Cole-Stayed Bridge StfwcivresWinker Adler GotzerPas encore d'évaluation
- c1 Mechanical PropertiesDocument46 pagesc1 Mechanical PropertiesHusnal TaufiqPas encore d'évaluation
- FIP Industriale Elastomeric IsolatorsDocument16 pagesFIP Industriale Elastomeric IsolatorsSimon PetrovčičPas encore d'évaluation
- Mechanics of SolidDocument100 pagesMechanics of SolidasgharPas encore d'évaluation
- Study Note Stress - Strain Analysis of Simple Structures RevBDocument20 pagesStudy Note Stress - Strain Analysis of Simple Structures RevBSboniso KhethukuthulaPas encore d'évaluation
- Integral Bridges and The Modelling of Soil-Structure InteractionDocument10 pagesIntegral Bridges and The Modelling of Soil-Structure Interactionkevin_au18Pas encore d'évaluation
- As 2439.2-2007 Perforated Plastics Drainage and Effluent Pipe and Fittings Perforated Effluent Pipe and AssocDocument7 pagesAs 2439.2-2007 Perforated Plastics Drainage and Effluent Pipe and Fittings Perforated Effluent Pipe and AssocSAI Global - APACPas encore d'évaluation
- 01 Casing Dimensions, Materials & StrengthsDocument76 pages01 Casing Dimensions, Materials & StrengthsBogieGunturPas encore d'évaluation
- R B U B S S G: Technical Note by K.L. Soderman and J.P. GiroudDocument10 pagesR B U B S S G: Technical Note by K.L. Soderman and J.P. GiroudHareesha N GPas encore d'évaluation
- UMATDocument6 pagesUMATshahriar_B100% (2)
- Lab C - Torsion - Mech - MRPDocument5 pagesLab C - Torsion - Mech - MRPIdaam Abdulla SaaidPas encore d'évaluation
- Geomechanics Applied DrillingDocument7 pagesGeomechanics Applied DrillingYouhan KareminaPas encore d'évaluation
- Shear StressDocument13 pagesShear StressAsad KhokharPas encore d'évaluation
- FULL COPY MIST Journal 2019 PDFDocument122 pagesFULL COPY MIST Journal 2019 PDFMd Tahidul Islam SaimonPas encore d'évaluation
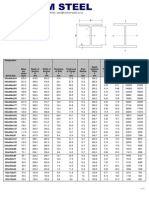
- Universal Columns2Document2 pagesUniversal Columns2denyfatePas encore d'évaluation