Vous aimerez peut-être aussi
- Introdução Aos Sistemas De Controle Com Implementação De Pid E Fuzzy No ArduinoD'EverandIntrodução Aos Sistemas De Controle Com Implementação De Pid E Fuzzy No ArduinoPas encore d'évaluation
- Manual n2000 v30x F PortuguêsDocument11 pagesManual n2000 v30x F PortuguêsDanielrcruzPas encore d'évaluation
- Manual Controlador Novus Modelo N1200 v20xDocument13 pagesManual Controlador Novus Modelo N1200 v20xAnonymous BanTco100% (1)
- Melsec FX Familia FXDocument80 pagesMelsec FX Familia FXSam SystPas encore d'évaluation
- Manual Simplificado Altivar 31 - PT PDFDocument18 pagesManual Simplificado Altivar 31 - PT PDFJaime FernandesPas encore d'évaluation
- PTBR Acs380 FW D A5Document546 pagesPTBR Acs380 FW D A5deusimarPas encore d'évaluation
- Manual DMY 2030Document47 pagesManual DMY 2030Alex Silva100% (4)
- Resumo de Parametrização Rápida para Inversores de FreqüênDocument12 pagesResumo de Parametrização Rápida para Inversores de FreqüênJeferson AndradePas encore d'évaluation
- CFW-09 RegenerativoDocument56 pagesCFW-09 RegenerativoBilheiroPas encore d'évaluation
- Inversores de Frequencia Weg - Cfw08Document16 pagesInversores de Frequencia Weg - Cfw08Jorge FerreiraPas encore d'évaluation
- Curso de Automação Industrial PDFDocument2 pagesCurso de Automação Industrial PDFGil XavierPas encore d'évaluation
- Como Configurar o Altivar 71Document7 pagesComo Configurar o Altivar 71albertocosta1953Pas encore d'évaluation
- WEG CFW 09 Manual Do Usuario 0899.5298 4.0x Manual Portugues BRDocument359 pagesWEG CFW 09 Manual Do Usuario 0899.5298 4.0x Manual Portugues BRRenan Gonçalves100% (5)
- Catalogo de Produtos OmronDocument59 pagesCatalogo de Produtos Omrongerrosil00Pas encore d'évaluation
- WEG Manual de Programacao CFW300 10003424521 PTDocument158 pagesWEG Manual de Programacao CFW300 10003424521 PTMarcelo Onofre PeixotoPas encore d'évaluation
- MAN-CFW-08 Micro Line PDFDocument106 pagesMAN-CFW-08 Micro Line PDFmaikonjalvesPas encore d'évaluation
- Manual Multi Prog PlusDocument8 pagesManual Multi Prog Pluscaio.in.dust3815Pas encore d'évaluation
- Inversor Powerflex 70 PDFDocument11 pagesInversor Powerflex 70 PDFchenrique_832896Pas encore d'évaluation
- Inversor Weg Cfw700 - PidDocument7 pagesInversor Weg Cfw700 - PidPedro Fagundes InchaustiPas encore d'évaluation
- Guia Do Usuário Do Detector de Metais IQ PTDocument82 pagesGuia Do Usuário Do Detector de Metais IQ PTWashington LucasPas encore d'évaluation
- CFW-500 Programacao Acesso Corrigido 07-02-11 Rev01 PDFDocument142 pagesCFW-500 Programacao Acesso Corrigido 07-02-11 Rev01 PDFLeandroPas encore d'évaluation
- Gefran DS 100-200Document4 pagesGefran DS 100-200jonas hiperrollPas encore d'évaluation
- PT - ACS880 - Manual de FirmwareDocument496 pagesPT - ACS880 - Manual de FirmwarePDA L21Pas encore d'évaluation
- EBOOK Programador de CLP - JoaoDocument38 pagesEBOOK Programador de CLP - JoaoJoão Luis BarrosPas encore d'évaluation
- Configurando o PF40 Na Rede DeviceNetDocument40 pagesConfigurando o PF40 Na Rede DeviceNetMarcelo C. OliveiraPas encore d'évaluation
- Linguagem LadderDocument16 pagesLinguagem LadderAlison Gibim100% (1)
- Manual IG5A v1Document20 pagesManual IG5A v1Pedro BarbosaPas encore d'évaluation
- Treinamento Prog - CLP Básico CX - One ComentadoDocument244 pagesTreinamento Prog - CLP Básico CX - One ComentadoRamon MotaPas encore d'évaluation
- Manual Do Inversor Adv50Document34 pagesManual Do Inversor Adv50WANDERSON ANTUNES DE MORAISPas encore d'évaluation
- Manual Ref615Document788 pagesManual Ref615Andresa Lemes100% (1)
- Inversor de Frequencia Power FLX 700s Fase 2 Carca As 9-13 20d-qs004 - PT-P PDFDocument76 pagesInversor de Frequencia Power FLX 700s Fase 2 Carca As 9-13 20d-qs004 - PT-P PDFObsol EtoPas encore d'évaluation
- Tutorial de Comunicação e Backup Inversores Série 1000Document27 pagesTutorial de Comunicação e Backup Inversores Série 1000Navegador9100% (3)
- Cartão de Controle WEG CFW Guia Parada de Seguranca 10000933196 en Es PTDocument13 pagesCartão de Controle WEG CFW Guia Parada de Seguranca 10000933196 en Es PTLuanPas encore d'évaluation
- Siemens - Micromaster 440Document4 pagesSiemens - Micromaster 440chnanduPas encore d'évaluation
- Manual Ihm 800 PDFDocument176 pagesManual Ihm 800 PDFAlexandre LopesPas encore d'évaluation
- ManualDocument16 pagesManualEle isPas encore d'évaluation
- Programação de IHMDocument183 pagesProgramação de IHMnfmaykox100% (3)
- MU SmCodi-4Document23 pagesMU SmCodi-4ERIQUE SOARES SANTOSPas encore d'évaluation
- Catalogo Delta CPLDocument24 pagesCatalogo Delta CPLEvandro Souza MeloPas encore d'évaluation
- Aula 6 - Contadores e Temporizadores - Lista de Exercícios PráticosDocument9 pagesAula 6 - Contadores e Temporizadores - Lista de Exercícios PráticosandregrothPas encore d'évaluation
- CFW-10 Ve2.8xDocument5 pagesCFW-10 Ve2.8xh1906Pas encore d'évaluation
- CFW11 Manutenção - R05 - PTDocument210 pagesCFW11 Manutenção - R05 - PTAdriano Alves100% (1)
- WEG CFW 08 Inversor de Frequencia Catalogo Portugues BRDocument12 pagesWEG CFW 08 Inversor de Frequencia Catalogo Portugues BRsergioamaralportelaPas encore d'évaluation
- Desenvolvendo Uma Interface Ihm Modbus Tcp/ip No ArduinoD'EverandDesenvolvendo Uma Interface Ihm Modbus Tcp/ip No ArduinoPas encore d'évaluation
- Implementando Um Inversor De Frequência Vetorial Programado No Arduino Com Driver Para Motor De Até 3 CvD'EverandImplementando Um Inversor De Frequência Vetorial Programado No Arduino Com Driver Para Motor De Até 3 CvPas encore d'évaluation
- Projetos De Instrumentação Eletrônica Usando O ArduinoD'EverandProjetos De Instrumentação Eletrônica Usando O ArduinoPas encore d'évaluation
- Projetos De Eletrônica De Potência Usando O ArduinoD'EverandProjetos De Eletrônica De Potência Usando O ArduinoPas encore d'évaluation
- Desenvolvimento De Projetos Em Clp Ladder Baseado No Twidosuite Volume ÚnicoD'EverandDesenvolvimento De Projetos Em Clp Ladder Baseado No Twidosuite Volume ÚnicoPas encore d'évaluation
- Projetos De Eletrônica Industrial Usando O ArduinoD'EverandProjetos De Eletrônica Industrial Usando O ArduinoPas encore d'évaluation
- Projetos Em Clp Ladder Baseado Na Placa Arduino Uno Parte ID'EverandProjetos Em Clp Ladder Baseado Na Placa Arduino Uno Parte IPas encore d'évaluation
- Introdução às linguagens de programação para CLPD'EverandIntrodução às linguagens de programação para CLPPas encore d'évaluation
- Proxmox Ceph PT BRDocument6 pagesProxmox Ceph PT BRHalbe Bruno de AraújoPas encore d'évaluation
- Teste - MecânicaDocument6 pagesTeste - MecânicaLuciana SilvaPas encore d'évaluation
- Aula 11Document63 pagesAula 11Gustavo DominicesPas encore d'évaluation
- Questões AL 1.1Document2 pagesQuestões AL 1.1Diogo AlexandrePas encore d'évaluation
- Memorial Descritivo AutomaçãoDocument13 pagesMemorial Descritivo AutomaçãoregfsdgfPas encore d'évaluation
- Manual Do Usuário Do PETRADocument67 pagesManual Do Usuário Do PETRAMagno RégisPas encore d'évaluation
- Aula 02 - MAD - Bacteriologia IDocument51 pagesAula 02 - MAD - Bacteriologia IGabriely CristinaPas encore d'évaluation
- Aula 1 2 e 3 - Etiopatogênese Geral Das LesõesDocument21 pagesAula 1 2 e 3 - Etiopatogênese Geral Das Lesõescamilla fPas encore d'évaluation
- 2 Lista de Exercícios de Química Do 3o Ano (2013)Document6 pages2 Lista de Exercícios de Química Do 3o Ano (2013)Valério LondePas encore d'évaluation
- AVALIAÇÃO BIMESTRAL DE FISICA - 2º Bimestre - 3º AnoDocument4 pagesAVALIAÇÃO BIMESTRAL DE FISICA - 2º Bimestre - 3º AnoÉder MunizPas encore d'évaluation
- Prova PDFDocument12 pagesProva PDFMaria MarizPas encore d'évaluation
- Estruturas Metálicas - Dimensionamento À Tração: Disciplina: Projeto de Instalações Hidráulicas Prof. Msc. Igor LimaDocument69 pagesEstruturas Metálicas - Dimensionamento À Tração: Disciplina: Projeto de Instalações Hidráulicas Prof. Msc. Igor LimaALAN DOURADO DE CASTROPas encore d'évaluation
- 6 Argumentos Teistas Contemporâneos PDFDocument15 pages6 Argumentos Teistas Contemporâneos PDFzwinglioPas encore d'évaluation
- Ajuste Do Excesso de Ar Na Queima Do Bagaço de CanaDocument1 pageAjuste Do Excesso de Ar Na Queima Do Bagaço de CanaAnonymous QY7Iu8fBPas encore d'évaluation
- Brousseau G. SlidesDocument67 pagesBrousseau G. SlidesE_RCARVALHO100% (1)
- FichasDocument1 pageFichasCatarina FernandesPas encore d'évaluation
- Danfe Marcenarya Art Moveis Ltda: NF-e #000.000.330 Série 001Document1 pageDanfe Marcenarya Art Moveis Ltda: NF-e #000.000.330 Série 001Diego PedroPas encore d'évaluation
- Fundamentos Da HarmoniaDocument108 pagesFundamentos Da HarmoniaJoao Roberto Pereira100% (3)
- Fundamentos Da Higiene OcupacionalDocument32 pagesFundamentos Da Higiene OcupacionaljheimissonPas encore d'évaluation
- Fichas Tecnicas OriginalDocument204 pagesFichas Tecnicas OriginalgrassiengenhariaPas encore d'évaluation
- Lista de Exercicios Energia LivreDocument3 pagesLista de Exercicios Energia Livreclaudio0% (2)
- Evangelhos Apócrifos - (A Sofia de Jesus Cristo)Document9 pagesEvangelhos Apócrifos - (A Sofia de Jesus Cristo)Diego AntunesPas encore d'évaluation
- Tratamento de Icterícia NeonatalDocument10 pagesTratamento de Icterícia NeonatalAcbal AchyPas encore d'évaluation
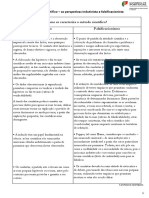
- O Metodo Cientifico Nas Perspetiva Indutivista e FalsificacionistaDocument2 pagesO Metodo Cientifico Nas Perspetiva Indutivista e Falsificacionistalulu laranjeiraPas encore d'évaluation
- Atividade de Recuperação Paralela 3 AnoDocument1 pageAtividade de Recuperação Paralela 3 AnofelupealmeidqPas encore d'évaluation
- D2 Matemática SAEB - PENSE EXATODocument43 pagesD2 Matemática SAEB - PENSE EXATOfbmendesPas encore d'évaluation
- Aula 2 Eletroquímica (Modo de Compatibilidade)Document43 pagesAula 2 Eletroquímica (Modo de Compatibilidade)Ronan MullerPas encore d'évaluation
- Optic ADocument6 pagesOptic ApaulaorobertaoPas encore d'évaluation
- 03 - Operadores Relacionais, Lógicos e Condicionais PDFDocument19 pages03 - Operadores Relacionais, Lógicos e Condicionais PDFLarissa PrutkiPas encore d'évaluation
- Ebook Scrum ArretadoDocument76 pagesEbook Scrum ArretadoRaimundo MoreiraPas encore d'évaluation