Vous aimerez peut-être aussi
- Manipulación de cargas con carretillas elevadoras. IEXD0108D'EverandManipulación de cargas con carretillas elevadoras. IEXD0108Pas encore d'évaluation
- Control de movimiento en manufactura. Automatización CNC fundamentos de diseño y modelamiento experimentalD'EverandControl de movimiento en manufactura. Automatización CNC fundamentos de diseño y modelamiento experimentalÉvaluation : 5 sur 5 étoiles5/5 (4)
- Aplicaciones de Los RobotsDocument9 pagesAplicaciones de Los RobotsharoldPas encore d'évaluation
- Apuntes de Robotica Unidad 1Document32 pagesApuntes de Robotica Unidad 1Moroni Cabrales SanchezPas encore d'évaluation
- Programación Módulo 0967 Comunicaciones Industriales Nivel C.F. G.S. 2 º Automatización y Robótica IndustrialDocument31 pagesProgramación Módulo 0967 Comunicaciones Industriales Nivel C.F. G.S. 2 º Automatización y Robótica IndustrialantoniopanyPas encore d'évaluation
- Sensores y TransductotresDocument60 pagesSensores y TransductotresChristian Ramírez VargasPas encore d'évaluation
- Tarea 5Document3 pagesTarea 5after909Pas encore d'évaluation
- Neumatica Antonio BuenoDocument39 pagesNeumatica Antonio Buenosind2Pas encore d'évaluation
- SR IRB120 SistemaRobotDocument103 pagesSR IRB120 SistemaRobotDavid Herrero100% (2)
- 0910 Soluciones para FormacionDocument96 pages0910 Soluciones para FormacionEnergy Sun BiocarPas encore d'évaluation
- Propuesta Diplomado SchneiderDocument24 pagesPropuesta Diplomado SchneiderEliseo MartinezPas encore d'évaluation
- Manual PLCDocument49 pagesManual PLCDamian100% (2)
- Brochure Erp-Mba3 Enterprise EditionDocument40 pagesBrochure Erp-Mba3 Enterprise EditionWellingtonPas encore d'évaluation
- 2ºgm-Iea-Prog Ictve 21 22Document35 pages2ºgm-Iea-Prog Ictve 21 22Alejandra Ana Morera BarriosPas encore d'évaluation
- 123 000 Libro de Texto Robotica IndustrialDocument188 pages123 000 Libro de Texto Robotica IndustrialArnulfo Gomez100% (1)
- Tema 1. Explotacion de Sistemas Microinformaticos - Parte1 PDFDocument30 pagesTema 1. Explotacion de Sistemas Microinformaticos - Parte1 PDFCarlos martinezPas encore d'évaluation
- IPLC - 04 Elementos Basicos PLCDocument23 pagesIPLC - 04 Elementos Basicos PLCSalvadorPas encore d'évaluation
- 11-12 PRACTICA 3-4 Multivibrador AstableDocument4 pages11-12 PRACTICA 3-4 Multivibrador Astablegos1000Pas encore d'évaluation
- 01 - Movimiento Manual Del Robot Con El JoystickDocument17 pages01 - Movimiento Manual Del Robot Con El JoystickJose Antonio MercadoPas encore d'évaluation
- Robotica 3.1 y 3.2 MamalonaDocument34 pagesRobotica 3.1 y 3.2 MamalonaCesar OmarPas encore d'évaluation
- Curso Temario De-Servomotores 05Document4 pagesCurso Temario De-Servomotores 05Mauricio PerezPas encore d'évaluation
- Importancia Del Control Automático en La Industria de Proceso - Taller Exactas para Todos 2017Document27 pagesImportancia Del Control Automático en La Industria de Proceso - Taller Exactas para Todos 2017Jail Arroyo Leon100% (1)
- Tema - 1 Introduccion A Los Sistemas de Comunicacic3b3n Industrial PDFDocument24 pagesTema - 1 Introduccion A Los Sistemas de Comunicacic3b3n Industrial PDFJavier RubioPas encore d'évaluation
- I Guia Automatismo Basico I UnidadDocument106 pagesI Guia Automatismo Basico I UnidadPatricck Ortega MaturanaPas encore d'évaluation
- Historia de La AutomatizacionDocument12 pagesHistoria de La AutomatizacionLuis Eduardo Barbosa TorresPas encore d'évaluation
- Presentacion PLCDocument46 pagesPresentacion PLCEdwar LopezPas encore d'évaluation
- Comoponentes ElectronicosDocument65 pagesComoponentes ElectronicosLuis Antonio AsprillaPas encore d'évaluation
- SeguridadDocument2 pagesSeguridadJose Antonio MercadoPas encore d'évaluation
- Integracion de Sistemas AutomatizadosDocument88 pagesIntegracion de Sistemas AutomatizadosXD100% (1)
- InstrumentacionDocument6 pagesInstrumentacionBORICUA11Pas encore d'évaluation
- Tema 1-Componentes de Un Automatismo EléctricoDocument33 pagesTema 1-Componentes de Un Automatismo EléctricoJorge Barroso83% (6)
- Reporte SensoresDocument11 pagesReporte SensoresDiego de la CruzPas encore d'évaluation
- Dialnet LosSistemasSCADAEnLaAutomatizacionIndustrial 5280242 PDFDocument12 pagesDialnet LosSistemasSCADAEnLaAutomatizacionIndustrial 5280242 PDFAnderson RodríguezPas encore d'évaluation
- Sistemas de Manufactura FlexibleDocument20 pagesSistemas de Manufactura FlexibleGregorio Saltos veraPas encore d'évaluation
- SERVOMECANISMOSDocument19 pagesSERVOMECANISMOSLuis Antonio Salas AguilaPas encore d'évaluation
- Unidad 5 RoboticaDocument16 pagesUnidad 5 RoboticaLuis CastilloPas encore d'évaluation
- LAB 01 Instrumentacion Digital y Redes IndustrialesDocument10 pagesLAB 01 Instrumentacion Digital y Redes IndustrialesHuber Romero ZevallosPas encore d'évaluation
- Resumen SIMBOLOGIADocument60 pagesResumen SIMBOLOGIAJim QuiñonezPas encore d'évaluation
- Manual Radio MobileDocument16 pagesManual Radio MobileLeandro Salvador Pastén GonzalezPas encore d'évaluation
- Implementacion de Sistema Io-LinkDocument91 pagesImplementacion de Sistema Io-LinkAlexis Montero OlivoPas encore d'évaluation
- Smart Maintenance: PRISMA GMAODocument1 pageSmart Maintenance: PRISMA GMAOJD Martinez FlorezPas encore d'évaluation
- Proyecto MecatronicoDocument21 pagesProyecto MecatronicoManuel Hilario AmanquiPas encore d'évaluation
- Libro EustaquioDocument179 pagesLibro EustaquioHector100% (1)
- ComponentesDocument18 pagesComponentesFernando Alonso Diaz HerreraPas encore d'évaluation
- Robotica IndustrialDocument4 pagesRobotica IndustrialAlirio LiLoPas encore d'évaluation
- Presentacion RoboticaDocument27 pagesPresentacion RoboticaJezzi GLPas encore d'évaluation
- Robótica Industrial FunciónDocument8 pagesRobótica Industrial FunciónJorge Elias Moscoso SanchezPas encore d'évaluation
- C9 RoboticaDocument39 pagesC9 Roboticamonica cuti magañoPas encore d'évaluation
- Cuestionario de Robotica 4Document5 pagesCuestionario de Robotica 4Jerry MercyPas encore d'évaluation
- Proyecto Con CimDocument17 pagesProyecto Con CimCarlos Alejandro Galvez ChicchonPas encore d'évaluation
- Unidad 4. Robotica. Sistemas de Control y Motores de ImpulsiónDocument39 pagesUnidad 4. Robotica. Sistemas de Control y Motores de ImpulsiónAlberto CarranzaPas encore d'évaluation
- Actividad 5Document5 pagesActividad 5alfredoPas encore d'évaluation
- Expo Unidad 4Document30 pagesExpo Unidad 4Jacke AngelesPas encore d'évaluation
- Fase 6Document16 pagesFase 6carolina pereiraPas encore d'évaluation
- Cuestionario 4 RoboticaDocument8 pagesCuestionario 4 RoboticaAlexander De la cruzPas encore d'évaluation
- ROBOTICADocument5 pagesROBOTICAvictoria stherPas encore d'évaluation
- Guia CirosDocument91 pagesGuia CirosHéctor PeñaPas encore d'évaluation
- Robotica y AutomatizacionDocument27 pagesRobotica y AutomatizacionJose Bardales RodriguezPas encore d'évaluation
- Procesos de Manufactura. Tarea 2Document4 pagesProcesos de Manufactura. Tarea 2Oscar LópezPas encore d'évaluation
- Proyecto Robot LaberintoDocument12 pagesProyecto Robot LaberintoAleXander DiiazPas encore d'évaluation
- Análisis en Corriente Alterna de Transistores BJTDocument10 pagesAnálisis en Corriente Alterna de Transistores BJTDiego CandoPas encore d'évaluation
- Amplificadores OperacionalesDocument7 pagesAmplificadores OperacionalesDiego CandoPas encore d'évaluation
- Aplicaciones Basicas El Oscilador de Schmitt y Generador de FuncionesDocument8 pagesAplicaciones Basicas El Oscilador de Schmitt y Generador de FuncionesDiego CandoPas encore d'évaluation
- Diego - Cando - Proyecto Multiproposito BABADocument3 pagesDiego - Cando - Proyecto Multiproposito BABADiego CandoPas encore d'évaluation
- SD TE3 Cando DiegoDocument4 pagesSD TE3 Cando DiegoDiego CandoPas encore d'évaluation
- Diego Cando Termoelectrica Santa ElenaDocument2 pagesDiego Cando Termoelectrica Santa ElenaDiego CandoPas encore d'évaluation
- Que Es La DomoticaDocument4 pagesQue Es La DomoticaDiego CandoPas encore d'évaluation
- Manos y Mentes en AcciónDocument1 pageManos y Mentes en AcciónDiego CandoPas encore d'évaluation
- SEE Mago19 TI#9 Cando DiegoDocument1 pageSEE Mago19 TI#9 Cando DiegoDiego CandoPas encore d'évaluation
- Polarización en DC Del Transistor BJTDocument15 pagesPolarización en DC Del Transistor BJTDiego CandoPas encore d'évaluation
- Materiales Magnéticos Permanentes Imanes PermanentesDocument16 pagesMateriales Magnéticos Permanentes Imanes PermanentesDiego CandoPas encore d'évaluation
- Diego Cando Termoelectrica Santa ElenaDocument2 pagesDiego Cando Termoelectrica Santa ElenaDiego CandoPas encore d'évaluation
- Maq de Imanes PermanentesDocument12 pagesMaq de Imanes PermanentesDiego CandoPas encore d'évaluation
- Practica 9 - Diego - Cando2Document12 pagesPractica 9 - Diego - Cando2Diego CandoPas encore d'évaluation
- Visita Técnica Central TermoeléctricaDocument6 pagesVisita Técnica Central TermoeléctricaDiego CandoPas encore d'évaluation
- SDE TI10 Cando DiegoDocument3 pagesSDE TI10 Cando DiegoDiego CandoPas encore d'évaluation
- SDE TI10 Cando DiegoDocument3 pagesSDE TI10 Cando DiegoDiego CandoPas encore d'évaluation
- Practica 1Document5 pagesPractica 1Diego CandoPas encore d'évaluation
- Trabajo-3 VertederoDocument1 pageTrabajo-3 VertederoDiego CandoPas encore d'évaluation
- Implementación de Convertidores de Potencia DC-DC, Caso 1. - Convertidor ElevadorDocument6 pagesImplementación de Convertidores de Potencia DC-DC, Caso 1. - Convertidor ElevadorDiego CandoPas encore d'évaluation
- Trabajo 2 - Crisis Petrolera 1973Document2 pagesTrabajo 2 - Crisis Petrolera 1973Diego CandoPas encore d'évaluation
- Informe 3Document15 pagesInforme 3Diego CandoPas encore d'évaluation
- Domotica Tipologia-X10Document9 pagesDomotica Tipologia-X10Diego CandoPas encore d'évaluation
- Formulario Fisica ModernaDocument6 pagesFormulario Fisica ModernaDiego CandoPas encore d'évaluation
- Materiales Magnéticos Permanentes Imanes PermanentesDocument16 pagesMateriales Magnéticos Permanentes Imanes PermanentesDiego CandoPas encore d'évaluation
- Gauss Lu CholeskyDocument16 pagesGauss Lu CholeskyDiego CandoPas encore d'évaluation
- SomaDocument6 pagesSomaDiego CandoPas encore d'évaluation
- Aplicaciones Basicas El Oscilador de Schmitt y Generador de FuncionesDocument8 pagesAplicaciones Basicas El Oscilador de Schmitt y Generador de FuncionesDiego CandoPas encore d'évaluation
- El Uso Del Aluminios en La Industria AutomotrizDocument20 pagesEl Uso Del Aluminios en La Industria AutomotrizAlan Didier Orozco50% (2)
- 14 Ficha TaiChiYang 32 EspadaDocument18 pages14 Ficha TaiChiYang 32 EspadaAnonymous rzCuQf100% (1)
- Endulzamiento o Desacidificación Del Gas NaturalDocument24 pagesEndulzamiento o Desacidificación Del Gas NaturalpayasitastarPas encore d'évaluation
- ILUMINACIONDocument7 pagesILUMINACIONpadmePas encore d'évaluation
- Teorema de Reciprocidad (Informe Terminado)Document6 pagesTeorema de Reciprocidad (Informe Terminado)Vladimir Falcon LunaPas encore d'évaluation
- Informe Torque GiroscopicoDocument9 pagesInforme Torque GiroscopicoBryan BritoPas encore d'évaluation
- Previo 2 LemDocument7 pagesPrevio 2 LemSandro ReyesPas encore d'évaluation
- Info - Lab7 - Espinoza Ganoza JesúsDocument5 pagesInfo - Lab7 - Espinoza Ganoza JesúsCRozilJ.EspinozaGanozaPas encore d'évaluation
- Operaciones Con PolinomiosDocument9 pagesOperaciones Con PolinomiosaxjosoPas encore d'évaluation
- Errores de Lavadorasecadora LGDocument2 pagesErrores de Lavadorasecadora LGfrancisco4294Pas encore d'évaluation
- Plan de Trabajo Diario Pet Maquinas HerramientasDocument3 pagesPlan de Trabajo Diario Pet Maquinas HerramientasJorge Gonzales OrtizPas encore d'évaluation
- Circulo de MohrDocument22 pagesCirculo de MohrAlexander Muñoz Díaz50% (2)
- Exposición Cibernetica - Pensamiento SistemicoDocument41 pagesExposición Cibernetica - Pensamiento SistemicoBrayan VargasPas encore d'évaluation
- PDF Ejercicio 1 y 2 Teorema de Maxwell y Betti CompressDocument6 pagesPDF Ejercicio 1 y 2 Teorema de Maxwell y Betti CompressDanhilo Medina GuevaraPas encore d'évaluation
- Conceptos Basicos de GeometriaDocument93 pagesConceptos Basicos de GeometriafrailesPas encore d'évaluation
- M205 Ud02 02Document45 pagesM205 Ud02 02Snow Gastón GaelPas encore d'évaluation
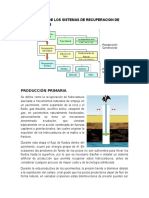
- Clasificacion de Los Sistemas de Recuperacion de HidrocarburosDocument4 pagesClasificacion de Los Sistemas de Recuperacion de Hidrocarburosyannnicck100% (2)
- Examen 1Document3 pagesExamen 1Jose Fabricio Zevallos Rodriguez100% (1)
- MANUAL-TECNOFARMA-2014 LaboratorioDocument50 pagesMANUAL-TECNOFARMA-2014 LaboratorioElizabeth JohanPas encore d'évaluation
- Simulación de Un Intercambiador de CalorDocument7 pagesSimulación de Un Intercambiador de CalorJazmin Flores MondragónPas encore d'évaluation
- Conceptos BasicosDocument8 pagesConceptos Basicosfc0jaimePas encore d'évaluation
- Informe 1 Levantamiento Topograìfico Radiación SimpleDocument11 pagesInforme 1 Levantamiento Topograìfico Radiación SimpleJuan David Castro ClevesPas encore d'évaluation
- Coordenadas PolaresDocument8 pagesCoordenadas PolaresAntonio Ruiz BelloPas encore d'évaluation
- Canal de LimpiaDocument4 pagesCanal de LimpiaanthonyPas encore d'évaluation
- Manual de Campo para La Descripcion y Caracterizacion de Macizos RocososDocument72 pagesManual de Campo para La Descripcion y Caracterizacion de Macizos RocososJohanQuispeMejia43% (7)
- Guia Respi 2 Depa PDFDocument27 pagesGuia Respi 2 Depa PDFIsabelPas encore d'évaluation
- 3.5.-Operacion y Cuidados CribasDocument68 pages3.5.-Operacion y Cuidados CribasFrancisco Meza GonzalezPas encore d'évaluation
- El Ultrasonido TerapéuticoDocument7 pagesEl Ultrasonido TerapéuticoMarilena Chambi MamaniPas encore d'évaluation
- Este Tema Trata Sobre Cómo Se Clasifican Los Materiales Según Su Composición QuímicaDocument2 pagesEste Tema Trata Sobre Cómo Se Clasifican Los Materiales Según Su Composición QuímicaPilar Mejia0% (1)
- 3C2 L12GRPC01051216Document29 pages3C2 L12GRPC01051216javier javierPas encore d'évaluation