Vous aimerez peut-être aussi
- Ayudantía Servicios Generales de Minas PDFDocument7 pagesAyudantía Servicios Generales de Minas PDFPipe Andres Arce MezaPas encore d'évaluation
- MMM - EJEMPLOS II ParcialDocument6 pagesMMM - EJEMPLOS II ParcialEren AlbePas encore d'évaluation
- Ecuación General de Transferencia de Calor-1Document22 pagesEcuación General de Transferencia de Calor-1Franklin MachucaPas encore d'évaluation
- Ayudantía 1Document7 pagesAyudantía 1Osvaldo RuizkPas encore d'évaluation
- 2.laminado en Frío y en CalienteDocument26 pages2.laminado en Frío y en CalienteAnthony Quiroz LeonPas encore d'évaluation
- Prueba de Hipotesis de Un GrupoDocument9 pagesPrueba de Hipotesis de Un Grupomcgonzalez.pradaPas encore d'évaluation
- Flujo UniformeDocument39 pagesFlujo UniformeJose SotaquiraPas encore d'évaluation
- seminario2023-1Document18 pagesseminario2023-1ccanaPas encore d'évaluation
- SOCIALIZACIÓNDocument6 pagesSOCIALIZACIÓNHENRRY ESPINELPas encore d'évaluation
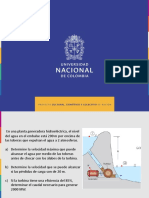
- Generación de energía hidroeléctrica a partir de un ríoDocument5 pagesGeneración de energía hidroeléctrica a partir de un ríoFernanda ToscanoPas encore d'évaluation
- Problemas Bal Energ Mec - PerdidasDocument12 pagesProblemas Bal Energ Mec - PerdidasSilvia Paola Rueda DuartePas encore d'évaluation
- Problemas Bal Energ Mec - PerdidasDocument12 pagesProblemas Bal Energ Mec - PerdidasSilvia Paola Rueda DuartePas encore d'évaluation
- Calculo Integral Arcocoseno - 1 (11x)Document2 pagesCalculo Integral Arcocoseno - 1 (11x)Anderson David Avila BernalPas encore d'évaluation
- Movimiento Armónico SimpleDocument12 pagesMovimiento Armónico SimpleJOSUE CRESPO MOLINAPas encore d'évaluation
- Formulario+Anual+Examen+2022 2023+ (Grupo+a+distancia)Document9 pagesFormulario+Anual+Examen+2022 2023+ (Grupo+a+distancia)AminePas encore d'évaluation
- UNIDAD 2 Tema 2Document4 pagesUNIDAD 2 Tema 2DANIEL HORACIO GALLARDO ROMEROPas encore d'évaluation
- Reacciones en serie de sustancia A a R y SDocument11 pagesReacciones en serie de sustancia A a R y SAmbarPas encore d'évaluation
- Examen - Vibraciones - Mecánicas (G) - 2022!01!24 Con Evaluación Continua - ResueltoDocument4 pagesExamen - Vibraciones - Mecánicas (G) - 2022!01!24 Con Evaluación Continua - Resueltoiñigo RodriguezPas encore d'évaluation
- Semana 8-I Problema 20.8Document8 pagesSemana 8-I Problema 20.8ferney gilberto beltran urregoPas encore d'évaluation
- Memorias de CalculoDocument6 pagesMemorias de CalculoSegundo FreddyPas encore d'évaluation
- VECTORES Resumen 2Document2 pagesVECTORES Resumen 2Cesar CaquiPas encore d'évaluation
- Taller 3 CiDocument13 pagesTaller 3 CiANDRES FELIPE OLIVEROS AYALAPas encore d'évaluation
- Ejercicio 2.11 Transferencia de CalorDocument2 pagesEjercicio 2.11 Transferencia de CalorYahir VillanuevaPas encore d'évaluation
- Ees Example - En.esDocument12 pagesEes Example - En.esJAIRO DE JESUS JARAMILLO RAMIREZPas encore d'évaluation
- Taller Geo 4Document11 pagesTaller Geo 4christianramirezleonardo20Pas encore d'évaluation
- Ejercicios de SolucionesDocument11 pagesEjercicios de SolucionesLalo RodriguezPas encore d'évaluation
- Cálculos resistencias circuito mixtoDocument6 pagesCálculos resistencias circuito mixtoale artysPas encore d'évaluation
- 1.8-A-4Document7 pages1.8-A-4Rodrigo rPas encore d'évaluation
- Problemas Termo 2Document4 pagesProblemas Termo 2Joel RamírezPas encore d'évaluation
- Problemas Termo 2Document4 pagesProblemas Termo 2Joel RamírezPas encore d'évaluation
- Modelado de sistema dinámico RLC en dominio tiempoDocument9 pagesModelado de sistema dinámico RLC en dominio tiempoDiego Alejandro IbañezPas encore d'évaluation
- Amplificador Operacional Seguidor de TensiónDocument3 pagesAmplificador Operacional Seguidor de TensiónEwo ScraifxPas encore d'évaluation
- Cómo calcular el caudal de un fluido a través de un diafragma usando la ecuación de BernoulliDocument5 pagesCómo calcular el caudal de un fluido a través de un diafragma usando la ecuación de Bernoulliferney gilberto beltran urregoPas encore d'évaluation
- Bloque I. Materiales U1 Estructura de Los Materiales para PDFDocument42 pagesBloque I. Materiales U1 Estructura de Los Materiales para PDFAna VillenaPas encore d'évaluation
- Ejercicio Propuesto de OpticaDocument5 pagesEjercicio Propuesto de OpticaAdriana SuarezPas encore d'évaluation
- ÁLGEBRA SEM 2 - MergedDocument11 pagesÁLGEBRA SEM 2 - Merged202214098hPas encore d'évaluation
- Problemas Resueltos Segunda Ley de La TermodinamicaDocument15 pagesProblemas Resueltos Segunda Ley de La TermodinamicaJose Villagómez100% (1)
- Capítulo 7 (Editado)Document9 pagesCapítulo 7 (Editado)Eliad Francisco VergaraPas encore d'évaluation
- Evaporador Ejercicio Icp316 B.S.R.Q. Exposicion-3 PDFDocument5 pagesEvaporador Ejercicio Icp316 B.S.R.Q. Exposicion-3 PDFFernando Alfaro CazonPas encore d'évaluation
- Resumen de Formulas Parcial 1Document5 pagesResumen de Formulas Parcial 1Cristian GarnesPas encore d'évaluation
- FISICA Del 2 Al 11 SeptiembreDocument77 pagesFISICA Del 2 Al 11 SeptiembrePamela YelaPas encore d'évaluation
- Huacon Flores Jose Daniel-Ipr-S-Ma 1-1 Van20 #5Document2 pagesHuacon Flores Jose Daniel-Ipr-S-Ma 1-1 Van20 #5Analía MoralesPas encore d'évaluation
- Numeros CuanticosDocument30 pagesNumeros Cuanticosrudy quispePas encore d'évaluation
- 8.CIRCUITOS III - Respuesta en FrecuenciaDocument26 pages8.CIRCUITOS III - Respuesta en FrecuenciaJair Jose Luna SuarezPas encore d'évaluation
- Clase 8 Estimacion Puntual PDFDocument36 pagesClase 8 Estimacion Puntual PDFBoris LeonelPas encore d'évaluation
- Formulario Movimiento CurvilineoDocument2 pagesFormulario Movimiento CurvilineoLuis Fernando HGPas encore d'évaluation
- Convertidor ReductorDocument9 pagesConvertidor ReductorSamir VegaPas encore d'évaluation
- Termo BasicaDocument91 pagesTermo BasicaJessica SanchezPas encore d'évaluation
- Mecanica de FluidosDocument3 pagesMecanica de FluidosgatomasnaaPas encore d'évaluation
- Teorema de ConvolucionDocument6 pagesTeorema de ConvolucionPaul VásquezPas encore d'évaluation
- MicroeconomíaDocument5 pagesMicroeconomíaMontserrat ÁlvarezPas encore d'évaluation
- VOLUMETRÍADocument9 pagesVOLUMETRÍAFernanda ToscanoPas encore d'évaluation
- Ejercicios UntDocument2 pagesEjercicios UntVictor HugoPas encore d'évaluation
- Sistema de poleas para elevar carga de 45 kg con tensión máxima de salida de 5 kgDocument4 pagesSistema de poleas para elevar carga de 45 kg con tensión máxima de salida de 5 kgximena edith barria barriaPas encore d'évaluation
- Transf de Calor A 1ra Practica Calificada 2021-IDocument2 pagesTransf de Calor A 1ra Practica Calificada 2021-IJorge LopezPas encore d'évaluation
- Cálculo y diseño de estructuras de materiales compuestos de fibra de vidrioD'EverandCálculo y diseño de estructuras de materiales compuestos de fibra de vidrioPas encore d'évaluation
- Luis Fernando Rodriguez Unidad1 Tarea1Document26 pagesLuis Fernando Rodriguez Unidad1 Tarea1franky thiagoPas encore d'évaluation
- Cartilla No 3 El MercadeoDocument42 pagesCartilla No 3 El MercadeoJairo OrtegaPas encore d'évaluation
- Boleta AlmuerzoDocument12 pagesBoleta Almuerzofranky thiagoPas encore d'évaluation
- Solucion Ejercicios 1 y 5Document2 pagesSolucion Ejercicios 1 y 5franky thiagoPas encore d'évaluation
- TALLER 1 PlataformaDocument10 pagesTALLER 1 Plataformafranky thiagoPas encore d'évaluation
- 4-1 Comercial Autoestima FrankyDocument3 pages4-1 Comercial Autoestima Frankyfranky thiagoPas encore d'évaluation
- Franky Rodriguez - 2-2 Cuento Valores Cívicos y Sociales - Competencias Socio - Humanisticas - Lizeth GalindoDocument3 pagesFranky Rodriguez - 2-2 Cuento Valores Cívicos y Sociales - Competencias Socio - Humanisticas - Lizeth GalindoLUIS FERNANDO RODRIGUEZ LANCHEROSPas encore d'évaluation
- La Libertad de ElecciónDocument1 pageLa Libertad de Elecciónfranky thiagoPas encore d'évaluation
- 4-1 Comercial Autoestima FrankyDocument3 pages4-1 Comercial Autoestima Frankyfranky thiagoPas encore d'évaluation
- La Libertad de ElecciónDocument1 pageLa Libertad de Elecciónfranky thiagoPas encore d'évaluation
- ESTAMPADODocument6 pagesESTAMPADOfranky thiagoPas encore d'évaluation
- Versiculos de La BibliaDocument10 pagesVersiculos de La Bibliafranky thiagoPas encore d'évaluation
- Punto 7 y 8 de Ecuaciones DiferencialesDocument4 pagesPunto 7 y 8 de Ecuaciones Diferencialesfranky thiagoPas encore d'évaluation
- Luis Ferando Rodríguez - Conceptos Asociados Regresión y CorrelaciónDocument5 pagesLuis Ferando Rodríguez - Conceptos Asociados Regresión y Correlaciónfranky thiagoPas encore d'évaluation
- RubricaTaller1ArquitecturaComputadoresDocument3 pagesRubricaTaller1ArquitecturaComputadoresfranky thiagoPas encore d'évaluation
- Informe Dia Paita La TortugaDocument15 pagesInforme Dia Paita La TortugaYuri Gary Parodi RamirezPas encore d'évaluation
- Apuntes Del RenacimientoDocument30 pagesApuntes Del RenacimientoBrenda Nicolé100% (1)
- Partes y Elementos para La Construcción de Un AlgoritmoDocument14 pagesPartes y Elementos para La Construcción de Un AlgoritmoCapecarPas encore d'évaluation
- Plan de SesionDocument2 pagesPlan de SesionvhprofesorPas encore d'évaluation
- Contaminacion Ambiental MapasDocument2 pagesContaminacion Ambiental MapasErnesto Quispe CondoriPas encore d'évaluation
- Fichas Unidades 7 y 8 MTDocument19 pagesFichas Unidades 7 y 8 MTMiguepitres Nieves PerezPas encore d'évaluation
- Evangelista TorricelliDocument6 pagesEvangelista TorricelliGabriel Robert Meza PerezPas encore d'évaluation
- Segundo Sistema de SeñalesDocument2 pagesSegundo Sistema de Señalespablonicofernandez100% (1)
- Agricultura General Ing OviedoDocument86 pagesAgricultura General Ing OviedoDavid GalindoPas encore d'évaluation
- Actividad de Tutoria-25 de JunioDocument15 pagesActividad de Tutoria-25 de JunioNathalie VelasquezPas encore d'évaluation
- ServidoresDocument7 pagesServidoresFelipePas encore d'évaluation
- Multiculturalidad y ConstituciónDocument168 pagesMulticulturalidad y ConstituciónAngeloQuilcaPas encore d'évaluation
- Actividad de Aprendizaje 4 - Taller ComputaciónDocument5 pagesActividad de Aprendizaje 4 - Taller ComputaciónDavid AlburquequePas encore d'évaluation
- El Deseo Del OtroDocument7 pagesEl Deseo Del OtroKarina Chocobar100% (1)
- Evaluación Diagnóstica (PreTest) - Revisión Del IntentoDocument11 pagesEvaluación Diagnóstica (PreTest) - Revisión Del IntentoSherly ValenciaPas encore d'évaluation
- Fundamentos de Sistemas Operativos - Gunnar WolfDocument367 pagesFundamentos de Sistemas Operativos - Gunnar WolfEsteban Villafradez IanniniPas encore d'évaluation
- Teoria E Historia de La ArquitecturaDocument21 pagesTeoria E Historia de La ArquitecturaAndres Gutierrez CPas encore d'évaluation
- Neuro PsicologiaDocument10 pagesNeuro PsicologiaZule GarciaPas encore d'évaluation
- HT - Sika Injection-101 RCDocument4 pagesHT - Sika Injection-101 RCJames WrightPas encore d'évaluation
- COLADOS CompletoDocument7 pagesCOLADOS CompletoMaría Belén PiazzaPas encore d'évaluation
- Los Principios de La Animación Aplicados Al Motion GraphicsDocument3 pagesLos Principios de La Animación Aplicados Al Motion GraphicsLuis PereraPas encore d'évaluation
- Cuaderno1MatemáticaVD CompressedDocument48 pagesCuaderno1MatemáticaVD CompressedMirna Nadina AbentePas encore d'évaluation
- Guía de Diseño y Mejora Continua de Procesos AsistencialesDocument5 pagesGuía de Diseño y Mejora Continua de Procesos AsistencialesIsael BaezaPas encore d'évaluation
- Ejercicios Pronosticos 1Document8 pagesEjercicios Pronosticos 1Alvaro GPPas encore d'évaluation
- La Voz Del Eco. Erik PorgeDocument50 pagesLa Voz Del Eco. Erik PorgeMiguelÁngelRincónTobo100% (6)
- Ecuaciones DiferencialesDocument5 pagesEcuaciones DiferencialesJuLio GarciaPas encore d'évaluation
- 2020 Semana 22Document4 pages2020 Semana 22Stefania GallottiPas encore d'évaluation
- Comprensión Lectora 1er EjercicioDocument3 pagesComprensión Lectora 1er EjercicioPaulina Constenla Saide100% (1)
- Cuestionario de CATELLANODocument6 pagesCuestionario de CATELLANOJosue paredes10Pas encore d'évaluation
- D4 - Lectura Inferencial OkDocument58 pagesD4 - Lectura Inferencial OkMiguel Angel Travezaño AldanaPas encore d'évaluation