Vous aimerez peut-être aussi
- STAT 1520 NotesDocument61 pagesSTAT 1520 NotesnojnfoPas encore d'évaluation
- Darpan Chaudhary Analytics Take-Home TestDocument6 pagesDarpan Chaudhary Analytics Take-Home TestDarpan ChaudharyPas encore d'évaluation
- Study Notes To Ace Your Data Science InterviewDocument7 pagesStudy Notes To Ace Your Data Science InterviewDănuț DanielPas encore d'évaluation
- Loss Models From Data To Decisions Solutions Manual SETDocument6 pagesLoss Models From Data To Decisions Solutions Manual SETPhilipp50% (2)
- Solution 2Document4 pagesSolution 2fra.public0% (1)
- Final ExamDocument9 pagesFinal ExamPerficmsfitPas encore d'évaluation
- GARCH Models in Python 1Document31 pagesGARCH Models in Python 1visPas encore d'évaluation
- Tutorial Part I Information Theory Meets Machine Learning Tuto - Slides - Part1Document46 pagesTutorial Part I Information Theory Meets Machine Learning Tuto - Slides - Part1apdpjpPas encore d'évaluation
- Univariate Time Series Analysis With Matlab - M. PerezDocument147 pagesUnivariate Time Series Analysis With Matlab - M. Perezvincus27Pas encore d'évaluation
- Functional Data Analysis PDFDocument8 pagesFunctional Data Analysis PDFAdnan SyarifPas encore d'évaluation
- Guide To The Unified Process Featuring UML, Java and Design PatternsDocument1 pageGuide To The Unified Process Featuring UML, Java and Design Patternsaustinfru7Pas encore d'évaluation
- PTC Mathcad Prime 3.1 Migration Guide PDFDocument58 pagesPTC Mathcad Prime 3.1 Migration Guide PDFJose DuartePas encore d'évaluation
- Joinpoint Help 4.5.0.1Document147 pagesJoinpoint Help 4.5.0.1Camila Scarlette LettelierPas encore d'évaluation
- Statistical Computing by Using RDocument11 pagesStatistical Computing by Using RChen-Pan Liao100% (1)
- OrdinalexampleR PDFDocument9 pagesOrdinalexampleR PDFDamon CopelandPas encore d'évaluation
- Czekanowski Index-Based Similarity As Alternative Correlation Measure in N-Asset Portfolio AnalysisDocument1 pageCzekanowski Index-Based Similarity As Alternative Correlation Measure in N-Asset Portfolio AnalysisKonrad KonefałPas encore d'évaluation
- cs229 Notes1 PDFDocument28 pagescs229 Notes1 PDFRichieQCPas encore d'évaluation
- Causal InferenceDocument15 pagesCausal InferenceAfifPas encore d'évaluation
- Python Data Science Cookbook - (Index)Document9 pagesPython Data Science Cookbook - (Index)crystal chukuemekaPas encore d'évaluation
- Building An HR Dashboard in R Using Flexdashboard - by Sagar Kulkarni - Towards Data ScienceDocument1 pageBuilding An HR Dashboard in R Using Flexdashboard - by Sagar Kulkarni - Towards Data ScienceBhavana Sravanthi GubbalaPas encore d'évaluation
- Ch4 BootstrapDocument90 pagesCh4 BootstrapDaniels PicturesPas encore d'évaluation
- Data Visualization EbookDocument15 pagesData Visualization EbookBittu RanaPas encore d'évaluation
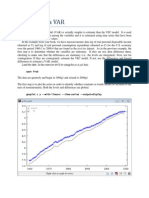
- Estimating A VAR - GretlDocument9 pagesEstimating A VAR - Gretlkaddour7108Pas encore d'évaluation
- Gamlss-Manual Instructions On How To Use The Gamlss Package 2008Document206 pagesGamlss-Manual Instructions On How To Use The Gamlss Package 2008LYNDSCPas encore d'évaluation
- Arch Model and Time-Varying VolatilityDocument17 pagesArch Model and Time-Varying VolatilityJorge Vega RodríguezPas encore d'évaluation
- To Matrix Analytic Methods in Stochastic Modeling: G. Latouche V. RamaswamiDocument1 pageTo Matrix Analytic Methods in Stochastic Modeling: G. Latouche V. RamaswamiAdrian PagePas encore d'évaluation
- (Skiena, 2017) - Book - The Data Science Design Manual - 3Document1 page(Skiena, 2017) - Book - The Data Science Design Manual - 3AnteroPas encore d'évaluation
- 05 Sklearn SlidesDocument70 pages05 Sklearn SlidesKinya KageniPas encore d'évaluation
- Chapter 7 - TThe Box-Jenkins Methodology For ARIMA ModelsDocument205 pagesChapter 7 - TThe Box-Jenkins Methodology For ARIMA Modelsnkminh19082003Pas encore d'évaluation
- Ggplot2 Elegant Graphics For Data Analysis (2016, Springer) PDFDocument281 pagesGgplot2 Elegant Graphics For Data Analysis (2016, Springer) PDFmjhgoemcapetulktuPas encore d'évaluation
- Business Analytics & Data Visualization - Unit1Document30 pagesBusiness Analytics & Data Visualization - Unit1Yukti JainPas encore d'évaluation
- Visual Analytics With TableauDocument11 pagesVisual Analytics With TableauEsha DongrePas encore d'évaluation
- Jason Brown Lee Text BooksDocument1 pageJason Brown Lee Text BooksBhaskarDevalapalli0% (1)
- Binomial DistributionDocument5 pagesBinomial DistributionAfiqah KzPas encore d'évaluation
- Introduction to Machine Learning in the Cloud with Python: Concepts and PracticesD'EverandIntroduction to Machine Learning in the Cloud with Python: Concepts and PracticesPas encore d'évaluation
- Bok:978 1 4899 7218 7 PDFDocument375 pagesBok:978 1 4899 7218 7 PDFPRITI DASPas encore d'évaluation
- Stata Graph Library For Network AnalysisDocument41 pagesStata Graph Library For Network AnalysisAlexander SainesPas encore d'évaluation
- Mastering Scientifi C Computing With RDocument55 pagesMastering Scientifi C Computing With RPackt PublishingPas encore d'évaluation
- Bayesian Statistics: A User's PerspectiveDocument24 pagesBayesian Statistics: A User's PerspectiveHany BadranPas encore d'évaluation
- A Learning Guide To R PDFDocument255 pagesA Learning Guide To R PDFizeldien58700% (1)
- Python Analyst ReferenceDocument31 pagesPython Analyst ReferenceCalin GruiaPas encore d'évaluation
- Machine Learning With BoostingDocument212 pagesMachine Learning With Boostingelena.echavarria100% (1)
- SQLDocument98 pagesSQLRohit GhaiPas encore d'évaluation
- Ridge and Lasso in Python PDFDocument5 pagesRidge and Lasso in Python PDFASHISH MALIPas encore d'évaluation
- Machine Learning Basics: An Illustrated Guide For Non-Technical ReadersDocument16 pagesMachine Learning Basics: An Illustrated Guide For Non-Technical ReadersGuoqi DingPas encore d'évaluation
- IE 7374 Spring SyllabusDocument5 pagesIE 7374 Spring SyllabusArnold ZhangPas encore d'évaluation
- Solver Frontline Solvers Reference GuideDocument305 pagesSolver Frontline Solvers Reference GuideCDH2346Pas encore d'évaluation
- Math NotationDocument20 pagesMath NotationhelloapurbaPas encore d'évaluation
- Phoebus J. Dhrymes (Auth.) - Introductory Econometrics-Springer-Verlag New York (1978) PDFDocument435 pagesPhoebus J. Dhrymes (Auth.) - Introductory Econometrics-Springer-Verlag New York (1978) PDFMelissa OrozcoPas encore d'évaluation
- Fit Indices Commonly Reported For CFA and SEMDocument2 pagesFit Indices Commonly Reported For CFA and SEMAbhinav NigamPas encore d'évaluation
- Data VisualizationDocument35 pagesData VisualizationKishan KikkeriPas encore d'évaluation
- Cointegration For The Applied EconomistDocument6 pagesCointegration For The Applied EconomistSama Atia100% (1)
- SQL HandbookDocument26 pagesSQL HandbookkjhlkPas encore d'évaluation
- New Advances in Machine LearningDocument374 pagesNew Advances in Machine LearningMücahid CandanPas encore d'évaluation
- Basic R For FinanceDocument312 pagesBasic R For FinanceLucas Carvalho100% (1)
- Project Report PDFDocument11 pagesProject Report PDFBingoPas encore d'évaluation
- SAS PresentationDocument49 pagesSAS PresentationVarun JainPas encore d'évaluation
- Stata Time Series Reference ManualDocument921 pagesStata Time Series Reference Manualz_k_j_vPas encore d'évaluation
- Ordinal and Multinomial ModelsDocument58 pagesOrdinal and Multinomial ModelsSuhel Ahmad100% (1)
- Pro Power BI Theme Creation: JSON Stylesheets for Automated Dashboard FormattingD'EverandPro Power BI Theme Creation: JSON Stylesheets for Automated Dashboard FormattingPas encore d'évaluation
- Transfer Function MotorDocument14 pagesTransfer Function MotorSH WALEEDPas encore d'évaluation
- Gain and Phase Margin Multiloop LQG Regulators: TheoryDocument7 pagesGain and Phase Margin Multiloop LQG Regulators: TheoryReta JibatPas encore d'évaluation
- Decoupling of Multvariable Systems by State FeedbackDocument14 pagesDecoupling of Multvariable Systems by State FeedbackReta JibatPas encore d'évaluation
- Decoupling of Multvariable Systems by State FeedbackDocument14 pagesDecoupling of Multvariable Systems by State FeedbackReta JibatPas encore d'évaluation
- Lecture - 01 Introduction & Two-Dimensional SystemsDocument35 pagesLecture - 01 Introduction & Two-Dimensional SystemsakozyPas encore d'évaluation
- AssignmentDocument12 pagesAssignmentSamuel TanPas encore d'évaluation
- Control System Theory and DesignDocument290 pagesControl System Theory and DesignPitzi PitzonePas encore d'évaluation
- Active Suspension - Laboratory GuideDocument21 pagesActive Suspension - Laboratory Guidemuhammad anisPas encore d'évaluation
- Control: Course Lecture SeriesDocument9 pagesControl: Course Lecture Series5611 M.Mubeen M.yaseenPas encore d'évaluation
- Thesis - Robust Control of Power Electronic ConvertersDocument172 pagesThesis - Robust Control of Power Electronic ConvertersDhananjayPas encore d'évaluation
- Matlab Exercises For Introductory Control Theory: Jenő Hetthéssy Ruth Bars András BartaDocument60 pagesMatlab Exercises For Introductory Control Theory: Jenő Hetthéssy Ruth Bars András BartaHélio Oliveira FerrariPas encore d'évaluation
- Lab 6Document3 pagesLab 6Vu LePas encore d'évaluation
- Modelagem Diagrama de BlocsoDocument12 pagesModelagem Diagrama de BlocsoAlessandro BraatzPas encore d'évaluation
- R5310206-Linear and Discrete Systems AnalysisDocument4 pagesR5310206-Linear and Discrete Systems AnalysissivabharathamurthyPas encore d'évaluation
- Ai Unit 1 NotesDocument51 pagesAi Unit 1 NotesDeekshitha YadavPas encore d'évaluation
- Control Systems NotesDocument133 pagesControl Systems Noteseee limatPas encore d'évaluation
- Solutions: Homework 2 Biomedical Signal, Systems and Control (BME 580.222)Document5 pagesSolutions: Homework 2 Biomedical Signal, Systems and Control (BME 580.222)JoJa JoJaPas encore d'évaluation
- MTBFDocument11 pagesMTBFAbdessamad HoudafPas encore d'évaluation
- Optimum State Space Control of A BLDC MotorDocument18 pagesOptimum State Space Control of A BLDC Motorauralius0% (1)
- EC6405 CS Question Bank FULLDocument84 pagesEC6405 CS Question Bank FULLreporterrajiniPas encore d'évaluation
- Batch FermentationDocument619 pagesBatch Fermentationmbaharyeh100% (1)
- Ocean Engineering: Mingsheng Chen, Rodney Eatock Taylor, Yoo Sang ChooDocument12 pagesOcean Engineering: Mingsheng Chen, Rodney Eatock Taylor, Yoo Sang ChooEliotPezoZegarraPas encore d'évaluation
- Linear Feedback Control Analysis and Design With Matlab: Dingy U Xue, Yangquan Chen, Derek P. AthertonDocument8 pagesLinear Feedback Control Analysis and Design With Matlab: Dingy U Xue, Yangquan Chen, Derek P. AthertonYogesh NargolkarPas encore d'évaluation
- LabVIEW Control Implementation TutorialDocument21 pagesLabVIEW Control Implementation TutorialDTPas encore d'évaluation
- IC8451-Control SystemsDocument21 pagesIC8451-Control Systemsusha raniPas encore d'évaluation
- Mathematics: On History of Mathematical Economics: Application of Fractional CalculusDocument28 pagesMathematics: On History of Mathematical Economics: Application of Fractional CalculusLokvinePas encore d'évaluation
- Linear Inverted Pendulum - Workbook (Student) PDFDocument23 pagesLinear Inverted Pendulum - Workbook (Student) PDFDeepthi Priya BejjamPas encore d'évaluation
- EE3302Document2 pagesEE3302ashishPas encore d'évaluation
- Starr Introduction To Applied Digital ControlDocument197 pagesStarr Introduction To Applied Digital Controldsab123Pas encore d'évaluation
- Feedback Control Systems Mit (Complete)Document609 pagesFeedback Control Systems Mit (Complete)Mario A Qui100% (1)
- Humanoid Robot: Development of A Simulation Environment of An Entertainment Humanoid RobotDocument24 pagesHumanoid Robot: Development of A Simulation Environment of An Entertainment Humanoid RobotRiyanto Dhiya FikriPas encore d'évaluation
- mmr03 CdsDocument79 pagesmmr03 Cds李默然Pas encore d'évaluation
- Markov Processes MengDocument29 pagesMarkov Processes Mengrfoliveira1975Pas encore d'évaluation