Vous aimerez peut-être aussi
- LP Model 2022Document13 pagesLP Model 2022Hamza MasoodPas encore d'évaluation
- LP Graphical SolutionDocument31 pagesLP Graphical SolutionManish RawatPas encore d'évaluation
- Linear Programming: Model Formulation and Graphical SolutionDocument48 pagesLinear Programming: Model Formulation and Graphical Solutionsiddharth devnaniPas encore d'évaluation
- UntitledDocument49 pagesUntitledAlamin KhanPas encore d'évaluation
- LP Mode - Formulation and Graphical SolutionDocument48 pagesLP Mode - Formulation and Graphical SolutionMd. Mizanur RahamanPas encore d'évaluation
- Linear ProgrammingDocument48 pagesLinear ProgrammingJoseph George KonnullyPas encore d'évaluation
- CH 02 by SRDocument22 pagesCH 02 by SRalyssabeacdelosreyesPas encore d'évaluation
- Chapter Two Linear ProgrammingDocument44 pagesChapter Two Linear ProgrammingEndalk AsfawPas encore d'évaluation
- Optimization Techniques L1Document29 pagesOptimization Techniques L1wanoxqpPas encore d'évaluation
- MSDocument18 pagesMSAnggePas encore d'évaluation
- LP Graphical SolutionDocument23 pagesLP Graphical SolutionSachin YadavPas encore d'évaluation
- Chapter Two Introduction To Linear ProgrammingDocument62 pagesChapter Two Introduction To Linear ProgrammingfekadePas encore d'évaluation
- Optimization Techniques L1 PDFDocument29 pagesOptimization Techniques L1 PDFwanoxqpPas encore d'évaluation
- Chapter-2 Linear Programing MLT Lecture NoteDocument33 pagesChapter-2 Linear Programing MLT Lecture NoteMIHRET ADDISSUPas encore d'évaluation
- Chapter 2 - Linear ProrammingDocument67 pagesChapter 2 - Linear ProrammingLetaPas encore d'évaluation
- Chapter 8 Process OptimisationDocument26 pagesChapter 8 Process OptimisationBatul KhuzemaPas encore d'évaluation
- Chapter 3Document60 pagesChapter 3Becky AlazarPas encore d'évaluation
- Lecture3 4Document31 pagesLecture3 4Bryan GavilánezPas encore d'évaluation
- Or 2Document80 pagesOr 2wzewdu21Pas encore d'évaluation
- Chapter-III Water Resources Systems: AnalysisDocument53 pagesChapter-III Water Resources Systems: AnalysisAbdirahman aliPas encore d'évaluation
- Linear Programming GRAPHICAL QUESTION 2Document48 pagesLinear Programming GRAPHICAL QUESTION 2Shreya DikshitPas encore d'évaluation
- MEM506 Ch2Document38 pagesMEM506 Ch2saleem saleemPas encore d'évaluation
- Linear Programming: Model Formulation and Graphical SolutionDocument65 pagesLinear Programming: Model Formulation and Graphical SolutionPatrice Elaine PillaPas encore d'évaluation
- Or ch2 Mod2Document60 pagesOr ch2 Mod2FuadPas encore d'évaluation
- FASE II - Tema 9Document69 pagesFASE II - Tema 9Angela MelgarPas encore d'évaluation
- Introduction To Management Science: Thirteenth EditionDocument51 pagesIntroduction To Management Science: Thirteenth EditionShimulPas encore d'évaluation
- Note1 Model FormulationDocument17 pagesNote1 Model Formulationアユ ギタ100% (1)
- Aced 23 Module 2-3Document14 pagesAced 23 Module 2-3JessaPas encore d'évaluation
- 3 OR Introduction GraphicDocument40 pages3 OR Introduction Graphickaleab takelePas encore d'évaluation
- Optimization Problems 1Document12 pagesOptimization Problems 1AnjanPas encore d'évaluation
- Balaji Opt Lecture2 Sp13Document47 pagesBalaji Opt Lecture2 Sp13Cristian Silva GalazPas encore d'évaluation
- Science A Modeling and Case Studies Approach With Spreadsheets 4th Edition Hillier 007809660x 9780078096600Document36 pagesScience A Modeling and Case Studies Approach With Spreadsheets 4th Edition Hillier 007809660x 9780078096600dannygibbsyeqszxgdor100% (19)
- Chp13 LinearOptimization2Document45 pagesChp13 LinearOptimization2john hartPas encore d'évaluation
- DS Linear ProgrammimgDocument54 pagesDS Linear ProgrammimgKartik SharmaPas encore d'évaluation
- Spreadsheet Modeling & Decision Analysis: A Practical Introduction To Management ScienceDocument34 pagesSpreadsheet Modeling & Decision Analysis: A Practical Introduction To Management ScienceAashrith ParvathaneniPas encore d'évaluation
- Linear Programming - SolverDocument34 pagesLinear Programming - SolvermrusdiantoPas encore d'évaluation
- Chapter 7.1 - Linear ProgrammingDocument48 pagesChapter 7.1 - Linear Programmingsewnet asfawPas encore d'évaluation
- Ch. 1 Linear Programing Part 1Document36 pagesCh. 1 Linear Programing Part 1Omar AlzayatPas encore d'évaluation
- Linear ProgrammingDocument34 pagesLinear ProgrammingGraciously Elle100% (1)
- CHP2 LpapplicationDocument44 pagesCHP2 LpapplicationFirdaus Lasnang0% (1)
- DS II End Term PGP 2016-18 SolutionsDocument20 pagesDS II End Term PGP 2016-18 SolutionsChinmay GokhalePas encore d'évaluation
- Linear Programming - Model Formulation, Graphical MethodDocument48 pagesLinear Programming - Model Formulation, Graphical MethodJoseph George KonnullyPas encore d'évaluation
- Quantitative Techniques: Linear Programming Problem - FormulationDocument43 pagesQuantitative Techniques: Linear Programming Problem - FormulationLipson ThomasPas encore d'évaluation
- IPandBIPDocument30 pagesIPandBIPMritunjay HansdaPas encore d'évaluation
- Notes 4Document23 pagesNotes 4Ming ChanPas encore d'évaluation
- Linear Programming ProblemDocument22 pagesLinear Programming ProblemAnonymous HaW3nYMRVPas encore d'évaluation
- Chapter 9 SCM NewDocument33 pagesChapter 9 SCM Newharis latifPas encore d'évaluation
- Optimization Models: 2.1 ConceptsDocument23 pagesOptimization Models: 2.1 ConceptsHarsh VoraPas encore d'évaluation
- Module 4 - Sensitivity Excel Solver - OFC ChangesDocument25 pagesModule 4 - Sensitivity Excel Solver - OFC Changeshello hahahPas encore d'évaluation
- Full Download Solutions Manual To Accompany Introduction To Management Science 4th Edition PDF Full ChapterDocument36 pagesFull Download Solutions Manual To Accompany Introduction To Management Science 4th Edition PDF Full Chapterdisbenchcrang9xds100% (16)
- Graphical Method LPPDocument27 pagesGraphical Method LPPAnika SharmaPas encore d'évaluation
- Chapter 3 - Introduction To Optimization Modeling: Answer: CDocument6 pagesChapter 3 - Introduction To Optimization Modeling: Answer: CRashaPas encore d'évaluation
- 3E4 Lecture 6Document28 pages3E4 Lecture 6Ke12ZedPas encore d'évaluation
- Lec 1Document42 pagesLec 1194023 194023Pas encore d'évaluation
- 2.1.LPP FormulationDocument13 pages2.1.LPP Formulationishaprabhu81Pas encore d'évaluation
- Unit 2Document64 pagesUnit 2Alemayehu gabisaPas encore d'évaluation
- Lecture 05Document18 pagesLecture 05Zhu KPas encore d'évaluation
- Chapter 3 Linear ProgrammingDocument35 pagesChapter 3 Linear ProgrammingSaad ShaikhPas encore d'évaluation
- Ch3 ComputerSolutionSensitivityAnalysisDocument38 pagesCh3 ComputerSolutionSensitivityAnalysisBob RobPas encore d'évaluation
- Complex Product Development Model: Holistic model composed of detailed explanations for developing products containing a mix of mechanics, electronics, and programsD'EverandComplex Product Development Model: Holistic model composed of detailed explanations for developing products containing a mix of mechanics, electronics, and programsPas encore d'évaluation
- Smart Protein Plant Based Food Sector Report 2Document199 pagesSmart Protein Plant Based Food Sector Report 2campeon00magnatesPas encore d'évaluation
- 10 Killer Tips For Transcribing Jazz Solos - Jazz AdviceDocument21 pages10 Killer Tips For Transcribing Jazz Solos - Jazz Advicecdmb100% (2)
- EN 50122-1 January 2011 Corrientes RetornoDocument81 pagesEN 50122-1 January 2011 Corrientes RetornoConrad Ziebold VanakenPas encore d'évaluation
- 5066452Document53 pages5066452jlcheefei9258Pas encore d'évaluation
- Advertising II Marathi VersionDocument91 pagesAdvertising II Marathi VersionHarsh Sangani100% (1)
- BJAS - Volume 5 - Issue Issue 1 Part (2) - Pages 275-281Document7 pagesBJAS - Volume 5 - Issue Issue 1 Part (2) - Pages 275-281Vengky UtamiPas encore d'évaluation
- Iphone and Ipad Development TU GrazDocument2 pagesIphone and Ipad Development TU GrazMartinPas encore d'évaluation
- EVOM ManualDocument2 pagesEVOM ManualHouston WhitePas encore d'évaluation
- Owners Manual Air Bike Unlimited Mag 402013Document28 pagesOwners Manual Air Bike Unlimited Mag 402013David ChanPas encore d'évaluation
- Midi Pro Adapter ManualDocument34 pagesMidi Pro Adapter ManualUli ZukowskiPas encore d'évaluation
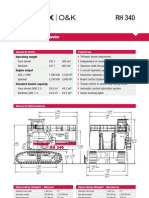
- Hydraulic Mining ExcavatorDocument8 pagesHydraulic Mining Excavatorasditia_07100% (1)
- Aliping PDFDocument54 pagesAliping PDFDirect LukePas encore d'évaluation
- UM-140-D00221-07 SeaTrac Developer Guide (Firmware v2.4)Document154 pagesUM-140-D00221-07 SeaTrac Developer Guide (Firmware v2.4)Antony Jacob AshishPas encore d'évaluation
- Ducted Split ACsDocument31 pagesDucted Split ACsHammadZaman100% (1)
- Introduction To DifferentiationDocument10 pagesIntroduction To DifferentiationaurennosPas encore d'évaluation
- Aditya Birla GroupDocument21 pagesAditya Birla GroupNarendra ThummarPas encore d'évaluation
- BMGT 200 Assignment 2 Answer KeysDocument3 pagesBMGT 200 Assignment 2 Answer Keysharout keshishianPas encore d'évaluation
- (Campus of Open Learning) University of Delhi Delhi-110007Document1 page(Campus of Open Learning) University of Delhi Delhi-110007Sahil Singh RanaPas encore d'évaluation
- NABARD R&D Seminar FormatDocument7 pagesNABARD R&D Seminar FormatAnupam G. RatheePas encore d'évaluation
- The Privatization PolicyDocument14 pagesThe Privatization PolicyRIBLEN EDORINAPas encore d'évaluation
- Bad Memories Walkthrough 0.52Document10 pagesBad Memories Walkthrough 0.52Micael AkumaPas encore d'évaluation
- Mosharaf HossainDocument2 pagesMosharaf HossainRuhul RajPas encore d'évaluation
- Chemistry Investigatory Project (R)Document23 pagesChemistry Investigatory Project (R)BhagyashreePas encore d'évaluation
- Dominion Wargame RulesDocument301 pagesDominion Wargame Rules4544juutf100% (4)
- SyncopeDocument105 pagesSyncopeJohn DasPas encore d'évaluation
- Retail Banking Black BookDocument95 pagesRetail Banking Black Bookomprakash shindePas encore d'évaluation
- Statistics and Probability: Quarter 4 - (Week 6)Document8 pagesStatistics and Probability: Quarter 4 - (Week 6)Jessa May MarcosPas encore d'évaluation
- Alkosign Product CatalogeDocument20 pagesAlkosign Product CatalogeShree AgrawalPas encore d'évaluation
- Agency Canvas Ing PresentationDocument27 pagesAgency Canvas Ing Presentationkhushi jaiswalPas encore d'évaluation
- Kosher Leche Descremada Dairy America Usa Planta TiptonDocument2 pagesKosher Leche Descremada Dairy America Usa Planta Tiptontania SaezPas encore d'évaluation