Vous aimerez peut-être aussi
- Simulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorD'EverandSimulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorPas encore d'évaluation
- Pss Tlbo PDFDocument8 pagesPss Tlbo PDFsyammalaPas encore d'évaluation
- Investigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsD'EverandInvestigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsPas encore d'évaluation
- Fuzzy Co-Ordination of FACTSDocument11 pagesFuzzy Co-Ordination of FACTSS Bharadwaj ReddyPas encore d'évaluation
- A Particle-Swarm-Based Approach of Power System Stability Enhancement With Unified Power Ow ControllerDocument9 pagesA Particle-Swarm-Based Approach of Power System Stability Enhancement With Unified Power Ow ControllerMmillion AlemayehuPas encore d'évaluation
- PaperM 8039Document12 pagesPaperM 8039BilPas encore d'évaluation
- Fuzzy Coordination of Facts Controllers ForDocument13 pagesFuzzy Coordination of Facts Controllers ForYogesh YadavPas encore d'évaluation
- MATLAB/Simlink Based Power System Stabilizer With PID ControllerDocument14 pagesMATLAB/Simlink Based Power System Stabilizer With PID ControllerragaPas encore d'évaluation
- UPFC Control Based On New IP Type Controller: Mojtaba Shirvani, Babak Keyvani, Mostafa Abdollahi and Ahmad MemaripourDocument8 pagesUPFC Control Based On New IP Type Controller: Mojtaba Shirvani, Babak Keyvani, Mostafa Abdollahi and Ahmad MemaripourMmillion AlemayehuPas encore d'évaluation
- Power System StabilizerDocument10 pagesPower System StabilizerAsif Ali ShaikPas encore d'évaluation
- Improvement of Power System Transient Stability Using An Intelligent Control MethodDocument9 pagesImprovement of Power System Transient Stability Using An Intelligent Control MethodKhubaib AhmedPas encore d'évaluation
- Bacterial Foraging Optimization Based Load Frequency Control of Interconnected Power Systems With Static Synchronous Series CompensatorDocument7 pagesBacterial Foraging Optimization Based Load Frequency Control of Interconnected Power Systems With Static Synchronous Series CompensatorSahitya16Pas encore d'évaluation
- Design and Analysis of An Adaptive Fuzzy Power System StabilizerDocument7 pagesDesign and Analysis of An Adaptive Fuzzy Power System StabilizermiguelankeloPas encore d'évaluation
- Optimization of Power System Stabilizers Relying On Particle Swarm OptimizersDocument8 pagesOptimization of Power System Stabilizers Relying On Particle Swarm OptimizerssasikalasivakumarPas encore d'évaluation
- Transient Stability Enhancement of Power System Using Intelligent TechniqueDocument5 pagesTransient Stability Enhancement of Power System Using Intelligent TechniqueBrijendra SinghPas encore d'évaluation
- GN and Performance CriteriaDocument2 pagesGN and Performance CriteriatetrixPas encore d'évaluation
- Fuzzy Coordination of FACTS Controllers For Damping Power System OscillationsDocument13 pagesFuzzy Coordination of FACTS Controllers For Damping Power System Oscillations429by3Pas encore d'évaluation
- Improvement of Transient Stability of Two Machine System Using Static VAR Compensator and Power System StabilizerDocument4 pagesImprovement of Transient Stability of Two Machine System Using Static VAR Compensator and Power System StabilizereditorijsaaPas encore d'évaluation
- A Practical Power System Stabilizer Tuning For GARRI Power StationDocument8 pagesA Practical Power System Stabilizer Tuning For GARRI Power StationLê Trung DũngPas encore d'évaluation
- 32.performance Analysis - FullDocument10 pages32.performance Analysis - FullyeisongarcesPas encore d'évaluation
- Optimal Placement of SVC and Statcom For Voltage Stability Enhancement Under Contingency Using Cat Swarm OptimizationDocument16 pagesOptimal Placement of SVC and Statcom For Voltage Stability Enhancement Under Contingency Using Cat Swarm Optimizationsabarullah haliPas encore d'évaluation
- Power System Stability & Control - Wide Area Damping ControllerDocument6 pagesPower System Stability & Control - Wide Area Damping ControllerPradeep MuppanaPas encore d'évaluation
- Control of A Single-Stage Three-Phase Boost Power Factor Correction RectifierDocument6 pagesControl of A Single-Stage Three-Phase Boost Power Factor Correction RectifierGoriparthi SambasievaraavPas encore d'évaluation
- International Journal of Engineering Research and DevelopmentDocument9 pagesInternational Journal of Engineering Research and DevelopmentIJERDPas encore d'évaluation
- Unit-Iv Small-Signal Stability Analysis With ControllersDocument37 pagesUnit-Iv Small-Signal Stability Analysis With Controllershabte gebreial shrashrPas encore d'évaluation
- Uninterruptible Power Supply Multiloop Control Employing Digital Predictive Voltage and Current RegulatorsDocument9 pagesUninterruptible Power Supply Multiloop Control Employing Digital Predictive Voltage and Current RegulatorsPhạm Văn TưởngPas encore d'évaluation
- Stability Improvement Based On Power System Stabilizer and Static VAR CompensatorDocument7 pagesStability Improvement Based On Power System Stabilizer and Static VAR Compensatormahesh_pattabhi038Pas encore d'évaluation
- Chapter-1: 1.1 Pi ControllerDocument21 pagesChapter-1: 1.1 Pi ControllerRAVINA MANGALPas encore d'évaluation
- Vijay FPP ESD PT11Document65 pagesVijay FPP ESD PT11Swathi PrasadPas encore d'évaluation
- 1, March 47: of ForDocument8 pages1, March 47: of Forcarlos gomez reyesPas encore d'évaluation
- Analysis of Neural and Fuzzy-Power Electronic ControlDocument9 pagesAnalysis of Neural and Fuzzy-Power Electronic ControlVisu TamilPas encore d'évaluation
- Transient Stability Improvement of IEEE 9 Bus System With Shunt Facts Device StatcomDocument5 pagesTransient Stability Improvement of IEEE 9 Bus System With Shunt Facts Device StatcomBhavik PrajapatiPas encore d'évaluation
- Power OscillationsDocument54 pagesPower OscillationsVijay RohillaPas encore d'évaluation
- Chapter One: 1.1 BackgroundDocument14 pagesChapter One: 1.1 Backgroundbisrat yeshidagnaPas encore d'évaluation
- Problem StatementDocument9 pagesProblem StatementTauseef Gillani100% (1)
- ALSPA Adaptive PSS - Technical DescriptionDocument5 pagesALSPA Adaptive PSS - Technical DescriptionLiviuPas encore d'évaluation
- Voltage Stability Improvement by Using SVC With Fuzzy Logic Controller-224 PDFDocument6 pagesVoltage Stability Improvement by Using SVC With Fuzzy Logic Controller-224 PDFhailekahPas encore d'évaluation
- 9609 PDFDocument13 pages9609 PDFnaghamPas encore d'évaluation
- Power Quality Through DPFCDocument6 pagesPower Quality Through DPFCradhika doraPas encore d'évaluation
- TEK 150105-Chapter 3 SupplementDocument5 pagesTEK 150105-Chapter 3 SupplementCangkang SainsPas encore d'évaluation
- 0499 ICNTET PPT FinalDocument22 pages0499 ICNTET PPT Finaloko nanaPas encore d'évaluation
- Arthit - Voltage Stability Study With SymbolicDocument6 pagesArthit - Voltage Stability Study With Symbolicbalasim HusseinPas encore d'évaluation
- Design of Power System Stabilizer With Neuro Fuzzy UPFC ControllerDocument4 pagesDesign of Power System Stabilizer With Neuro Fuzzy UPFC ControllerRamesh BabuPas encore d'évaluation
- An Adaptive Power Oscillation Damping Controllerby STATCOM With Energy StorageDocument10 pagesAn Adaptive Power Oscillation Damping Controllerby STATCOM With Energy StorageChristian EmenikePas encore d'évaluation
- Design of Power System Stabilizer Using Fuzzy Based Sliding Mode Control TechniqueDocument16 pagesDesign of Power System Stabilizer Using Fuzzy Based Sliding Mode Control TechniqueLê Trung DũngPas encore d'évaluation
- Adaptive Control For Low-Frequency Power OscillationsDocument6 pagesAdaptive Control For Low-Frequency Power OscillationsAJER JOURNALPas encore d'évaluation
- Gi 3311211125Document5 pagesGi 3311211125Shakeel RanaPas encore d'évaluation
- Power Systems PROJECTS WITH ABSTRACTDocument5 pagesPower Systems PROJECTS WITH ABSTRACTElangovan SekarPas encore d'évaluation
- Power System Stabilizer: Block DiagramDocument2 pagesPower System Stabilizer: Block DiagramSueja MalligwadPas encore d'évaluation
- Hybrid Shuffled Frog Leaping Algorithm and Nelder - Mead Simplex Search For Optimal Reactive Power DispatchDocument26 pagesHybrid Shuffled Frog Leaping Algorithm and Nelder - Mead Simplex Search For Optimal Reactive Power DispatchMubarek MohammedPas encore d'évaluation
- EA P Project Summary: Efficiency Optimization Control of AC Induction Motors: Initial Laboratory ResultsDocument9 pagesEA P Project Summary: Efficiency Optimization Control of AC Induction Motors: Initial Laboratory Resultskannan2030Pas encore d'évaluation
- Modeling and Simulation of SRF and P-Q Based Control DstatcomDocument7 pagesModeling and Simulation of SRF and P-Q Based Control DstatcomIJERDPas encore d'évaluation
- Pole-Placement Designs of Power System StabilizersDocument7 pagesPole-Placement Designs of Power System StabilizersabelcatayPas encore d'évaluation
- LDO Voltage Regulator by Sanjay Singh NIT KKRDocument9 pagesLDO Voltage Regulator by Sanjay Singh NIT KKRSanjay SinghPas encore d'évaluation
- Optimal Design of Power System Stabilizer For Multi-Machine Power System Using Differential Evolution AlgorithmDocument8 pagesOptimal Design of Power System Stabilizer For Multi-Machine Power System Using Differential Evolution Algorithmashikhmd4467Pas encore d'évaluation
- A Simple Fuzzy Excitation Control System For Synchronous GeneratorDocument5 pagesA Simple Fuzzy Excitation Control System For Synchronous Generatoranil1216kumar100% (1)
- 2015 Fast-SpeedDrivesforPermanentMagnetDocument7 pages2015 Fast-SpeedDrivesforPermanentMagnetjemmyducPas encore d'évaluation
- Design of Optimal PID Controller For LFC and AVR in Power System Using PSODocument4 pagesDesign of Optimal PID Controller For LFC and AVR in Power System Using PSOsyed1188Pas encore d'évaluation
- Multi-Step Predictive Current Control For NPC GridDocument10 pagesMulti-Step Predictive Current Control For NPC GridthinhPas encore d'évaluation
- 29.a Versatile Control Scheme For A Dynamic Voltage Restorer ForDocument69 pages29.a Versatile Control Scheme For A Dynamic Voltage Restorer ForShruthi NayakPas encore d'évaluation
- Advertisement (PPP Node)Document1 pageAdvertisement (PPP Node)Xahid YousafPas encore d'évaluation
- Summary of The Simulation:: Name: Tayyab Mansoor Ch. SAP: 24166Document31 pagesSummary of The Simulation:: Name: Tayyab Mansoor Ch. SAP: 24166Xahid YousafPas encore d'évaluation
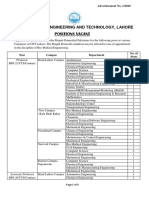
- Positions Vacant: University of Engineering and Technology, LahoreDocument4 pagesPositions Vacant: University of Engineering and Technology, LahoreXahid YousafPas encore d'évaluation
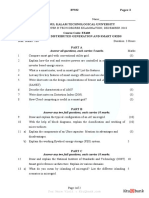
- EE403 Distributed Generation and Smart Grids: Answer All Questions, Each Carries 5 MarksDocument2 pagesEE403 Distributed Generation and Smart Grids: Answer All Questions, Each Carries 5 MarksXahid YousafPas encore d'évaluation
- Course Folders Fall 2019 EEDocument2 pagesCourse Folders Fall 2019 EEXahid YousafPas encore d'évaluation
- Addendum (Positions Vacant) : University of Engineering and Technology, LahoreDocument2 pagesAddendum (Positions Vacant) : University of Engineering and Technology, LahoreXahid YousafPas encore d'évaluation
- Voice Recognition Application Based Home Automation System With People CounterDocument5 pagesVoice Recognition Application Based Home Automation System With People CounterXahid YousafPas encore d'évaluation
- P1 Fractional ConfDocument1 pageP1 Fractional ConfXahid YousafPas encore d'évaluation
- Distributed Generation in Power Systems: An Overview and Key IssuesDocument9 pagesDistributed Generation in Power Systems: An Overview and Key IssuesXahid YousafPas encore d'évaluation
- Ssc-Jen 2013: (Question Paper With Solutions)Document31 pagesSsc-Jen 2013: (Question Paper With Solutions)Xahid YousafPas encore d'évaluation
- P 1 Aims EnergyDocument1 pageP 1 Aims EnergyXahid YousafPas encore d'évaluation
- P 1 IEEE AccessDocument1 pageP 1 IEEE AccessXahid YousafPas encore d'évaluation
- A Guide To TNAnjnkjnDocument39 pagesA Guide To TNAnjnkjnXahid YousafPas encore d'évaluation
- Online Course Design: Element 3. Assessment and MeasurementDocument1 pageOnline Course Design: Element 3. Assessment and MeasurementXahid YousafPas encore d'évaluation
- Thermocouple Gauge - Docx Kashif Iqbal PDFDocument6 pagesThermocouple Gauge - Docx Kashif Iqbal PDFXahid YousafPas encore d'évaluation
- Online Course Design Template: Stage 1 - Desired ResultsDocument1 pageOnline Course Design Template: Stage 1 - Desired ResultsXahid YousafPas encore d'évaluation
- Application of Tabu Search Method in Solving A Taxi-Sharing ProblemDocument7 pagesApplication of Tabu Search Method in Solving A Taxi-Sharing ProblemXahid YousafPas encore d'évaluation
- A Guide To TNAnjnkjnDocument39 pagesA Guide To TNAnjnkjnXahid YousafPas encore d'évaluation
- 30 Linux System Monitoring Tools Every SysAdmin Should Know - NixcraftDocument90 pages30 Linux System Monitoring Tools Every SysAdmin Should Know - Nixcraftvignesh05Pas encore d'évaluation
- Data Science Online Workshop Data Science vs. Data AnalyticsDocument1 pageData Science Online Workshop Data Science vs. Data AnalyticsGaurav VarshneyPas encore d'évaluation
- The Gower Handbook of Project Management: Part 1: ProjectsDocument2 pagesThe Gower Handbook of Project Management: Part 1: ProjectschineduPas encore d'évaluation
- Modern DrmaDocument7 pagesModern DrmaSHOAIBPas encore d'évaluation
- Leisure TimeDocument242 pagesLeisure TimeArdelean AndradaPas encore d'évaluation
- DigoxinDocument18 pagesDigoxinApril Mergelle LapuzPas encore d'évaluation
- India: SupplyDocument6 pagesIndia: SupplyHarish NathanPas encore d'évaluation
- CopacabanaDocument2 pagesCopacabanaNereus Sanaani CAñeda Jr.Pas encore d'évaluation
- Desire of Ages Chapter-33Document3 pagesDesire of Ages Chapter-33Iekzkad Realvilla100% (1)
- The Handmaid's Tale - Chapter 2.2Document1 pageThe Handmaid's Tale - Chapter 2.2amber_straussPas encore d'évaluation
- Urinary Tract Infection in Children: CC MagbanuaDocument52 pagesUrinary Tract Infection in Children: CC MagbanuaVanessa YunquePas encore d'évaluation
- Comfrey Materia Medica HerbsDocument17 pagesComfrey Materia Medica HerbsAlejandra Guerrero100% (1)
- Nespresso Case StudyDocument7 pagesNespresso Case StudyDat NguyenPas encore d'évaluation
- RBMWizardDocument286 pagesRBMWizardJesus EspinozaPas encore d'évaluation
- EIS Summary NotsDocument62 pagesEIS Summary NotsKESHAV DroliaPas encore d'évaluation
- Thermal Physics Questions IB Question BankDocument43 pagesThermal Physics Questions IB Question BankIBBhuvi Jain100% (1)
- Unidad 12 (libro-PowerPoint)Document5 pagesUnidad 12 (libro-PowerPoint)Franklin Suarez.HPas encore d'évaluation
- E 05-03-2022 Power Interruption Schedule FullDocument22 pagesE 05-03-2022 Power Interruption Schedule FullAda Derana100% (2)
- Chapter 019Document28 pagesChapter 019Esteban Tabares GonzalezPas encore d'évaluation
- Chapter 12 NotesDocument4 pagesChapter 12 NotesIvanTh3Great100% (6)
- Personal Philosophy of Education-Exemplar 1Document2 pagesPersonal Philosophy of Education-Exemplar 1api-247024656Pas encore d'évaluation
- Aff Col MA Part IIDocument90 pagesAff Col MA Part IIAkanksha DubeyPas encore d'évaluation
- LittorinidaeDocument358 pagesLittorinidaeSyarif Prasetyo AdyutaPas encore d'évaluation
- Bagon-Taas Adventist Youth ConstitutionDocument11 pagesBagon-Taas Adventist Youth ConstitutionJoseph Joshua A. PaLaparPas encore d'évaluation
- Test Statistics Fact SheetDocument4 pagesTest Statistics Fact SheetIra CervoPas encore d'évaluation
- MGT501 Final Term MCQs + SubjectiveDocument33 pagesMGT501 Final Term MCQs + SubjectiveAyesha Abdullah100% (1)
- Business Administration: Hints TipsDocument11 pagesBusiness Administration: Hints Tipsboca ratonPas encore d'évaluation
- Cruz-Arevalo v. Layosa DigestDocument2 pagesCruz-Arevalo v. Layosa DigestPatricia Ann RueloPas encore d'évaluation
- Binary SearchDocument13 pagesBinary SearchASasSPas encore d'évaluation
- 10-C# Forms InteractionDocument22 pages10-C# Forms InteractionMaria Anndrea MendozaPas encore d'évaluation