Vous aimerez peut-être aussi
- Formación Académica Ingenieria CivilDocument2 pagesFormación Académica Ingenieria CivilOOnly AnythaPas encore d'évaluation
- TAREA Concreto en ObraDocument1 pageTAREA Concreto en ObraOOnly AnythaPas encore d'évaluation
- 8.calculo de La Demanda 1Document48 pages8.calculo de La Demanda 1luisPas encore d'évaluation
- Uso de Madera en Acabados de ConstrucciónDocument34 pagesUso de Madera en Acabados de ConstrucciónOOnly AnythaPas encore d'évaluation
- TAREA Concreto en ObraDocument1 pageTAREA Concreto en ObraOOnly AnythaPas encore d'évaluation
- Contenido de Humedad PDFDocument1 pageContenido de Humedad PDFArnold CollanquePas encore d'évaluation
- SUBDISCIPLINAS Ingenieria CivilDocument5 pagesSUBDISCIPLINAS Ingenieria CivilOOnly AnythaPas encore d'évaluation
- Historia de La Ingeniería CivilDocument2 pagesHistoria de La Ingeniería CivilOOnly AnythaPas encore d'évaluation
- Materias Necesarias para Un Ingeniero CivilDocument7 pagesMaterias Necesarias para Un Ingeniero CivilOOnly AnythaPas encore d'évaluation
- Informe Laboratorio de Mecánica de Suelos-F ChristianDocument2 pagesInforme Laboratorio de Mecánica de Suelos-F ChristianOOnly AnythaPas encore d'évaluation
- Calculos GranulometriaDocument2 pagesCalculos GranulometriaOOnly AnythaPas encore d'évaluation
- Analisis de Seguridad Del Trabajo (Llenar)Document2 pagesAnalisis de Seguridad Del Trabajo (Llenar)OOnly AnythaPas encore d'évaluation
- Campos de AplicaciónDocument4 pagesCampos de AplicaciónOOnly AnythaPas encore d'évaluation
- Contenido de Humedad PDFDocument1 pageContenido de Humedad PDFArnold CollanquePas encore d'évaluation
- Informe Lab Suelos 1Document6 pagesInforme Lab Suelos 1OOnly AnythaPas encore d'évaluation
- Informe Lab de Mecánica de Suelos-F IsaDocument5 pagesInforme Lab de Mecánica de Suelos-F IsaOOnly AnythaPas encore d'évaluation
- Comprobación del periodo de un péndulo simple mediante experimentosDocument1 pageComprobación del periodo de un péndulo simple mediante experimentosOOnly AnythaPas encore d'évaluation
- Memoria de Cálculo, Densidad NaturalDocument1 pageMemoria de Cálculo, Densidad NaturalOOnly AnythaPas encore d'évaluation
- Aproximacion Polinomial Metodo NewtonDocument4 pagesAproximacion Polinomial Metodo NewtonOOnly AnythaPas encore d'évaluation
- Problema de EstadisticaDocument6 pagesProblema de EstadisticaOOnly AnythaPas encore d'évaluation
- Trabajo Domiciliario N°1Document1 pageTrabajo Domiciliario N°1OOnly AnythaPas encore d'évaluation
- Trabajo DomiciliarioDocument6 pagesTrabajo DomiciliarioOOnly AnythaPas encore d'évaluation
- MATERIALES PETREOS Y ROCAS - Docx RESOLUCIONDocument16 pagesMATERIALES PETREOS Y ROCAS - Docx RESOLUCIONOOnly AnythaPas encore d'évaluation
- Lista de Problema Completo GBDocument3 pagesLista de Problema Completo GBOOnly AnythaPas encore d'évaluation
- Trabajo Domiciliario N°1Document1 pageTrabajo Domiciliario N°1OOnly AnythaPas encore d'évaluation
- RECOMENDACIONES PARA DISEÑO Y ENSAYOS DE MEZCLAS DE HORMIGÓNDocument5 pagesRECOMENDACIONES PARA DISEÑO Y ENSAYOS DE MEZCLAS DE HORMIGÓNOOnly AnythaPas encore d'évaluation
- Bases Intercolleras Fic 2019 PDFDocument6 pagesBases Intercolleras Fic 2019 PDFOOnly AnythaPas encore d'évaluation
- Muros Cortina: Recomendaciones técnicasDocument185 pagesMuros Cortina: Recomendaciones técnicasCristhian Jose100% (2)
- VidriosDocument25 pagesVidriosOOnly AnythaPas encore d'évaluation
- Tipos de ArquitecturaDocument14 pagesTipos de ArquitecturaOOnly AnythaPas encore d'évaluation
- Manual Barbero Dormilon PDFDocument7 pagesManual Barbero Dormilon PDFangie andreaPas encore d'évaluation
- Semana 5Document6 pagesSemana 5alejandro michelPas encore d'évaluation
- Modelo de RedesDocument9 pagesModelo de RedesCarlos VásquezPas encore d'évaluation
- Proyecto Curricular STIDocument27 pagesProyecto Curricular STIrefnan100% (6)
- Humanidades V Humanismo y Globalizacion PresentacionDocument2 pagesHumanidades V Humanismo y Globalizacion PresentacionJorge JuanPas encore d'évaluation
- Instalación de host virtual en GNS3Document12 pagesInstalación de host virtual en GNS3EddyMorPas encore d'évaluation
- Sistema de Control de Temperatura PDFDocument16 pagesSistema de Control de Temperatura PDFHeber De la CruzPas encore d'évaluation
- Creación CC manualDocument22 pagesCreación CC manualLuis Héctor Domínguez LaraPas encore d'évaluation
- Correlativas NUEVODG PDFDocument2 pagesCorrelativas NUEVODG PDFLuz AnayaPas encore d'évaluation
- Preventivo-Sala PCMDocument13 pagesPreventivo-Sala PCMWilliam J. Roa CriolloPas encore d'évaluation
- PIA DE MICROECONOMIA eDocument24 pagesPIA DE MICROECONOMIA ePedro JuarezPas encore d'évaluation
- Guia Rapida Monitor LOFT VDS V11 - 16 PDFDocument8 pagesGuia Rapida Monitor LOFT VDS V11 - 16 PDFROIeDROPas encore d'évaluation
- AAT1231Document290 pagesAAT1231pedroPas encore d'évaluation
- Catalogo de Refacciones RT180Document80 pagesCatalogo de Refacciones RT180Miguel EstevaPas encore d'évaluation
- Actividad Aprendizaje DSEIDocument9 pagesActividad Aprendizaje DSEIrafa TesciPas encore d'évaluation
- Caso Toyota Auditoría de SistemasDocument4 pagesCaso Toyota Auditoría de SistemasMarianoPas encore d'évaluation
- Deber de Dinamica APPE..Document7 pagesDeber de Dinamica APPE..Santiago Fabricio Quispe LuceroPas encore d'évaluation
- Historia Crítica de América Latina y Bolivia Etn 507Document11 pagesHistoria Crítica de América Latina y Bolivia Etn 507WILMA CABALLEROPas encore d'évaluation
- Comparacion y Caracteristicas Windows Vs LinuxDocument7 pagesComparacion y Caracteristicas Windows Vs Linuxsatdae0% (1)
- La Ingeniería Civil y Su Relación Con El Medio AmbienteDocument1 pageLa Ingeniería Civil y Su Relación Con El Medio AmbienteGarnica Arturo100% (1)
- Terminos Basicos de Contratacion LP 110 2018Document94 pagesTerminos Basicos de Contratacion LP 110 2018Ivan Ajpi TorrezPas encore d'évaluation
- Diagramas electrónicos simbolosDocument3 pagesDiagramas electrónicos simbolosDaniel MedinaPas encore d'évaluation
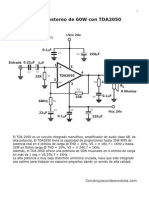
- Amplificador 60w Con Tda2050Document8 pagesAmplificador 60w Con Tda2050david100% (1)
- El Rol de La Logistica en El Comercio Internacional:: Ing. Juan R. Opertti (MBA)Document23 pagesEl Rol de La Logistica en El Comercio Internacional:: Ing. Juan R. Opertti (MBA)SAMANTHA HERNANDEZ CAZADEROPas encore d'évaluation
- Manual usuario prueba plataforma web convocatoria cargos directivosDocument9 pagesManual usuario prueba plataforma web convocatoria cargos directivosNancy Coraly Ayma SotoPas encore d'évaluation
- 2K-EUGR605026N1 - Gabinete Electrico Usos Generales 60x50x26 Nema 1RDocument1 page2K-EUGR605026N1 - Gabinete Electrico Usos Generales 60x50x26 Nema 1RArmando Orozco GuerraPas encore d'évaluation
- Diseño Curso Ept ComputacionDocument17 pagesDiseño Curso Ept ComputacionM. Emperatriz Carrasco Pintado50% (2)
- Trabajofinal+de+administracion+de+operaciones+ii - TR2Document9 pagesTrabajofinal+de+administracion+de+operaciones+ii - TR2Guadalupe Huincho100% (3)
- LIBRO GTEC Trabajos Completos 2015Document439 pagesLIBRO GTEC Trabajos Completos 2015odcardozo100% (1)
- Intercambio de saberes UCCDocument1 pageIntercambio de saberes UCCLorena VallejoPas encore d'évaluation