Vous aimerez peut-être aussi
- Basics on Geomatics and Satellite OrbitsDocument21 pagesBasics on Geomatics and Satellite OrbitsBea Maica Gavino100% (1)
- Supreme Court Rules on Constitutionality of Law Expanding Sandiganbayan JurisdictionDocument13 pagesSupreme Court Rules on Constitutionality of Law Expanding Sandiganbayan Jurisdictionsweet_karisma05Pas encore d'évaluation
- Philippines Supreme Court rules manager not criminally liable for libelDocument4 pagesPhilippines Supreme Court rules manager not criminally liable for libelallukazoldyckPas encore d'évaluation
- Guide To Creating Job in EGstarDocument2 pagesGuide To Creating Job in EGstarBea Maica GavinoPas encore d'évaluation
- CRIMINAL LAW 1 - University of Nueva Caceres-College of LawDocument3 pagesCRIMINAL LAW 1 - University of Nueva Caceres-College of LawBea Maica GavinoPas encore d'évaluation
- Revised Penal Code Articles 1-10 ReviewDocument26 pagesRevised Penal Code Articles 1-10 ReviewBea Maica GavinoPas encore d'évaluation
- 1 - Introduction To Matrices PDFDocument27 pages1 - Introduction To Matrices PDFBea Maica GavinoPas encore d'évaluation
- Law CasesDocument1 pageLaw CasesBea Maica GavinoPas encore d'évaluation
- Land Reg. LawsDocument2 pagesLand Reg. LawsBea Maica GavinoPas encore d'évaluation
- Marital nullity ruling based on total evidenceDocument7 pagesMarital nullity ruling based on total evidenceJohn Ramil RabePas encore d'évaluation
- Republic v. CA and MolinaDocument26 pagesRepublic v. CA and MolinamisterdodiPas encore d'évaluation
- G.R. No. 109975 PDFDocument6 pagesG.R. No. 109975 PDFBea Maica GavinoPas encore d'évaluation
- G.R. No. 119190Document5 pagesG.R. No. 119190Bea Maica GavinoPas encore d'évaluation
- G.R. No. 119190Document5 pagesG.R. No. 119190Bea Maica GavinoPas encore d'évaluation
- Hernandez Vs CADocument8 pagesHernandez Vs CAnettymownPas encore d'évaluation
- The Gist of The CaseDocument3 pagesThe Gist of The CaseBea Maica GavinoPas encore d'évaluation
- Republic v. Manalo Full Text and DigestDocument15 pagesRepublic v. Manalo Full Text and DigestLorenz Moises EnrickPas encore d'évaluation
- Civil Law KokobarDocument9 pagesCivil Law KokobarZainne Sarip BandingPas encore d'évaluation
- Philippines Supreme Court rules manager not criminally liable for libelDocument4 pagesPhilippines Supreme Court rules manager not criminally liable for libelallukazoldyckPas encore d'évaluation
- Land Reg. LawsDocument2 pagesLand Reg. LawsBea Maica GavinoPas encore d'évaluation
- Urbano Vs IAC DigestDocument1 pageUrbano Vs IAC DigestmheritzlynPas encore d'évaluation
- Research ProposalDocument5 pagesResearch ProposalBea Maica Gavino75% (4)
- GR No. L-1299Document7 pagesGR No. L-1299Bea Maica GavinoPas encore d'évaluation
- Atienza v. Villarosa DigestDocument6 pagesAtienza v. Villarosa DigesttinctPas encore d'évaluation
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (894)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (399)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (265)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (73)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (119)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- Motor Nameplate Meaning and IdentificationDocument25 pagesMotor Nameplate Meaning and IdentificationJorge ContrerasPas encore d'évaluation
- Masibus TT7S - R3F - 0913 - Isolated and Programmable Temperature TransmitterDocument2 pagesMasibus TT7S - R3F - 0913 - Isolated and Programmable Temperature TransmitternkiruthigairajuPas encore d'évaluation
- Aloha For ClassDocument23 pagesAloha For ClassetasureshPas encore d'évaluation
- DTL Training Report Avnish KatiyarDocument71 pagesDTL Training Report Avnish KatiyarKuldip Singh75% (4)
- Abt36rba3w SMDocument26 pagesAbt36rba3w SMaircoolplusPas encore d'évaluation
- How Your Radio Receives Music SignalsDocument2 pagesHow Your Radio Receives Music SignalsAlexPemaPas encore d'évaluation
- Radio in Portugal - An OverviewDocument43 pagesRadio in Portugal - An OverviewLuís CarvalhoPas encore d'évaluation
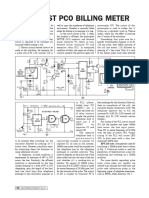
- Low Cost PCO Billing Meter PDFDocument1 pageLow Cost PCO Billing Meter PDFShrivlsi RamPas encore d'évaluation
- Annual Market Review & Forecast: Laser WeldingDocument40 pagesAnnual Market Review & Forecast: Laser WeldingwwwpolPas encore d'évaluation
- Three Stage Nested Miller Low - Voltage AmplifierDocument19 pagesThree Stage Nested Miller Low - Voltage Amplifierapi-19646514Pas encore d'évaluation
- Panasonic Ag dvx100 Ag Dvx100be Manual Do UtilizadorDocument12 pagesPanasonic Ag dvx100 Ag Dvx100be Manual Do UtilizadorAnderson Assis MansanoPas encore d'évaluation
- App Guide EntelliGuard - G 09 - 2020 AplicacionDocument100 pagesApp Guide EntelliGuard - G 09 - 2020 AplicacionjeorginagPas encore d'évaluation
- Inspectech: I.B.I.S. B-Scan Weld Flash Removal MonitorDocument2 pagesInspectech: I.B.I.S. B-Scan Weld Flash Removal Monitorfredy lopezPas encore d'évaluation
- Micom P122Document626 pagesMicom P122Raj Sekhar0% (1)
- National Semiconductor Is Now Part of Texas InstrumentsDocument13 pagesNational Semiconductor Is Now Part of Texas InstrumentsJavier AparicioPas encore d'évaluation
- QM RMCDocument3 pagesQM RMCfaruk604Pas encore d'évaluation
- Pro Ar12 4 Gs N.en GBDocument1 pagePro Ar12 4 Gs N.en GBBao Quoc MaiPas encore d'évaluation
- class-AB Voltage Follower2006Document2 pagesclass-AB Voltage Follower2006tuanka1Pas encore d'évaluation
- Filtering BasicsDocument83 pagesFiltering BasicsDikshitJainPas encore d'évaluation
- XT5042 - Datasheet PDFDocument2 pagesXT5042 - Datasheet PDFlabbasatyamPas encore d'évaluation
- IRLB4132PbF International RectifierDocument9 pagesIRLB4132PbF International RectifierJORGEPas encore d'évaluation
- Programmable Logic Devices: Mohammed Anvar P.K Ap/Ece Al-Ameen Engineering CollegeDocument52 pagesProgrammable Logic Devices: Mohammed Anvar P.K Ap/Ece Al-Ameen Engineering CollegeThahsin ThahirPas encore d'évaluation
- 1176 PDFDocument169 pages1176 PDFJoshua PalizaPas encore d'évaluation
- MS Progress Presentation M Ejaz MalikDocument8 pagesMS Progress Presentation M Ejaz Malikijaz sajjadPas encore d'évaluation
- Vertex VT26 MANUAL QIS - VT20V6Document19 pagesVertex VT26 MANUAL QIS - VT20V6JanmejoyPatraPas encore d'évaluation
- Project 9 - Low Noise Amplifier Design in ADS (March 2014)Document7 pagesProject 9 - Low Noise Amplifier Design in ADS (March 2014)Stephen J. WattPas encore d'évaluation
- Wi-Fi Router Huawei E5830 EngDocument28 pagesWi-Fi Router Huawei E5830 EngMuhammad Ibnu Al KaffyPas encore d'évaluation
- Price Miadri Grup 07.02Document158 pagesPrice Miadri Grup 07.02Arteom DobîndăPas encore d'évaluation
- PDF Split PDFDocument24 pagesPDF Split PDFAayush guptaPas encore d'évaluation
- PWD22 ManualDocument125 pagesPWD22 ManualMahmoud Hatem IbrahemPas encore d'évaluation