Vous aimerez peut-être aussi
- Configuracion de Modem InfinitumDocument22 pagesConfiguracion de Modem InfinitumOmarMataPas encore d'évaluation
- Tercer Parcial RedaccionDocument6 pagesTercer Parcial RedaccionmagdalenaPas encore d'évaluation
- Accid Hk2718Document6 pagesAccid Hk2718yamidPas encore d'évaluation
- Gestion de MantenimientoDocument7 pagesGestion de MantenimientoEvana Astudillo SandovalPas encore d'évaluation
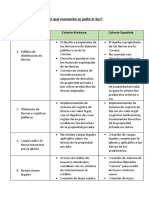
- En Qué Momento Se Jodió El SurDocument2 pagesEn Qué Momento Se Jodió El SurSANDY ESTEFANY VALERIANO CHICLLAPas encore d'évaluation
- Estándares de Calidad en El Ervicio de A&bDocument4 pagesEstándares de Calidad en El Ervicio de A&bNadieska GutierrezPas encore d'évaluation
- Perfil Ampliacion Del Sistema Agua y Alcantarillado - San RafaelDocument91 pagesPerfil Ampliacion Del Sistema Agua y Alcantarillado - San RafaelLenin FasanandoPas encore d'évaluation
- Blaker Concreto BombeableDocument5 pagesBlaker Concreto BombeableJHONSONJCPas encore d'évaluation
- A.-Planificaciòn Del Diseño de La Sesión de AprendizajeDocument1 pageA.-Planificaciòn Del Diseño de La Sesión de AprendizajeAlejandra Visitación TafurPas encore d'évaluation
- Curso LacteosDocument40 pagesCurso LacteosEliojeanPas encore d'évaluation
- Dibujar CajetinDocument19 pagesDibujar CajetinJohn PlataPas encore d'évaluation
- Anexo #6 - Plan de AuditoríaDocument5 pagesAnexo #6 - Plan de AuditoríaLizeth Marilu Mollohuanca FloresPas encore d'évaluation
- PRACTICA 1 Eq 9Document14 pagesPRACTICA 1 Eq 9Jesus MontantesPas encore d'évaluation
- Revenue ManagementDocument24 pagesRevenue ManagementVanessa Medina0% (1)
- Las Sanciones Son Un Crimen PDFDocument9 pagesLas Sanciones Son Un Crimen PDFPabasto BarquisimetoPas encore d'évaluation
- Practica 5Document14 pagesPractica 5Daniel S. NavaPas encore d'évaluation
- Marco Lógico Del ProyectoDocument4 pagesMarco Lógico Del ProyectoJuan Jose Sanchez CallePas encore d'évaluation
- Malla Tecnología e Informatica SegundoDocument6 pagesMalla Tecnología e Informatica SegundocelisPas encore d'évaluation
- Problemas y Aplicaciones Capitulo 22 MankiwDocument12 pagesProblemas y Aplicaciones Capitulo 22 MankiwJDMAX04 ;vPas encore d'évaluation
- Elementos de Un Sistema Petrolífero PDFDocument9 pagesElementos de Un Sistema Petrolífero PDFSantiago Ammar QuinteroPas encore d'évaluation
- Pauta MicroeconomiaDocument6 pagesPauta MicroeconomiaNicole ArdillaPas encore d'évaluation
- Quiz 3 BalanceDocument8 pagesQuiz 3 Balancejennifer9657Pas encore d'évaluation
- D. Administrativo FinalDocument14 pagesD. Administrativo FinalDANNA ALEJANDRA LA MADRID TOLEDOPas encore d'évaluation
- Analisis Situacional EntelDocument19 pagesAnalisis Situacional EntelAndrea RojasPas encore d'évaluation
- 40 - 102cm - 40BJ4E - BJ4 Series - Sharp EUDocument1 page40 - 102cm - 40BJ4E - BJ4 Series - Sharp EUCristina Piñol CorbellaPas encore d'évaluation
- Desarrollo de ProyectoDocument37 pagesDesarrollo de ProyectoRoxy Rous Salinas CruzPas encore d'évaluation
- Proyecto Cria de Cerdo (1) Eph2021Document28 pagesProyecto Cria de Cerdo (1) Eph2021lau tico100% (2)
- HT UCARSAN SANITIZER 420 Vs Español-MulDocument9 pagesHT UCARSAN SANITIZER 420 Vs Español-MulMartín AlcarrazPas encore d'évaluation
- T2 InvopeDocument5 pagesT2 InvopeBritney ChangPas encore d'évaluation
- Matriz de AnsoffDocument16 pagesMatriz de AnsoffElias PeresPas encore d'évaluation