Vous aimerez peut-être aussi
- Statement List InstructionsDocument50 pagesStatement List InstructionsMiladShahabiPas encore d'évaluation
- S7300ce 140903150130 Phpapp01Document18 pagesS7300ce 140903150130 Phpapp01Suhendri SaputraPas encore d'évaluation
- Simatic S7-300: The Universal, Small Control System Supplemented by New, Compact CpusDocument18 pagesSimatic S7-300: The Universal, Small Control System Supplemented by New, Compact CpusSunil SinghPas encore d'évaluation
- SIMATIC S7-200: Simatic Hmi The Human Machine Interface SIMATIC S7-200Document30 pagesSIMATIC S7-200: Simatic Hmi The Human Machine Interface SIMATIC S7-200gaston100% (1)
- 47-Control Instrumentation BrochureDocument12 pages47-Control Instrumentation BrochureFaizal Mohd SariPas encore d'évaluation
- Pcs7 Create Own Block Icons v8x enDocument33 pagesPcs7 Create Own Block Icons v8x enHhaabbde SybaritzPas encore d'évaluation
- PLC Siemens S7-300 Cpu 312C ManualDocument176 pagesPLC Siemens S7-300 Cpu 312C ManualKique KiPas encore d'évaluation
- Phy103 Tutorial QuestionsDocument30 pagesPhy103 Tutorial QuestionsGeorge nwatarali100% (1)
- Simatic S7-200Document30 pagesSimatic S7-200Bui Hong PhongPas encore d'évaluation
- PLC & Pneumatics ControlDocument5 pagesPLC & Pneumatics ControlAminullah MinPas encore d'évaluation
- Stepper Motor ApplicationDocument25 pagesStepper Motor ApplicationShanmuga SundarPas encore d'évaluation
- 6ra70 PDFDocument232 pages6ra70 PDFChowdary MnchowdaryPas encore d'évaluation
- S7 TIA Portal Programming With SCL: Online Instructor-Led TrainingDocument1 pageS7 TIA Portal Programming With SCL: Online Instructor-Led TrainingKhaled El-BeheryPas encore d'évaluation
- PLC Programming ManualDocument17 pagesPLC Programming ManualIsnaliza Moidis100% (1)
- STM32F30xx-31xx Standard Peripheral Library UM1581Document584 pagesSTM32F30xx-31xx Standard Peripheral Library UM1581John LeungPas encore d'évaluation
- Molded Parts DefectsDocument9 pagesMolded Parts DefectsPadmanava DasguptaPas encore d'évaluation
- SIWAREX CS Quick Guide V4 0 PDFDocument19 pagesSIWAREX CS Quick Guide V4 0 PDFrimou000Pas encore d'évaluation
- Vijeo Citect v7.40 Service Pack 2 - Release NotesDocument67 pagesVijeo Citect v7.40 Service Pack 2 - Release NotesUğur ÇilPas encore d'évaluation
- Calog ManualDocument34 pagesCalog Manualpatitay036817Pas encore d'évaluation
- Process Design Engineering-1 PDFDocument8 pagesProcess Design Engineering-1 PDFErmes Rosario ErmesPas encore d'évaluation
- SCE EN 020-011 R1404 Startup S7-1500 V13Document79 pagesSCE EN 020-011 R1404 Startup S7-1500 V13Yoga AdiPas encore d'évaluation
- PLC Tutorials on Mixing, Packaging, and Level ProcessesDocument7 pagesPLC Tutorials on Mixing, Packaging, and Level Processesmarshal galilee djitsa0% (2)
- Vijeo Designer V5.1 en InClass EPDocument235 pagesVijeo Designer V5.1 en InClass EPdaitoan402100% (1)
- Making and Importance of Process P & ID (Piping & Instrumentation Diagram)Document7 pagesMaking and Importance of Process P & ID (Piping & Instrumentation Diagram)yasirPas encore d'évaluation
- Electrical Wiring DigramDocument15 pagesElectrical Wiring DigramSunilMurkikarPas encore d'évaluation
- How Do You Integrate An HMI Operator Panel Into A Local Network?Document12 pagesHow Do You Integrate An HMI Operator Panel Into A Local Network?Bob YahyaPas encore d'évaluation
- Modern Electrical Drive Systems and Power Electronic ConvertersDocument9 pagesModern Electrical Drive Systems and Power Electronic ConvertersGthulasi78Pas encore d'évaluation
- Simatic HmiDocument324 pagesSimatic HmiAyman ElotaifyPas encore d'évaluation
- Vuniq User's ManualDocument96 pagesVuniq User's ManualMelchor VasquezPas encore d'évaluation
- DB macro automationDocument10 pagesDB macro automationAmoghPas encore d'évaluation
- Manual Cutler HammerDocument114 pagesManual Cutler HammerMarcelo Palacios SantanaPas encore d'évaluation
- Avr Libc User Manual 1.7.0Document460 pagesAvr Libc User Manual 1.7.0Vikraman ChoudhuryPas encore d'évaluation
- LAB 10 Introduction To Ladder Logic ProgrammingDocument10 pagesLAB 10 Introduction To Ladder Logic ProgrammingNyanphyo AungPas encore d'évaluation
- Powerflex 525 Adjustable Frequency Ac DriveDocument5 pagesPowerflex 525 Adjustable Frequency Ac DriveJaime RamosPas encore d'évaluation
- Electric Drives and Controls Pneumatics Service Linear Motion and Assembly Technologies HydraulicsDocument102 pagesElectric Drives and Controls Pneumatics Service Linear Motion and Assembly Technologies HydraulicsAnderson ThiagoPas encore d'évaluation
- SmartPlant Isometrics PDFDocument2 pagesSmartPlant Isometrics PDFManoj Kumar SinghPas encore d'évaluation
- Node-RedDocument25 pagesNode-RedAhmad SolihinPas encore d'évaluation
- FBD Programming GuideDocument3 pagesFBD Programming GuideEladio Cortes TapiaPas encore d'évaluation
- Leseprobe - en Proportional Hydraulic Advance Workbook SampleDocument50 pagesLeseprobe - en Proportional Hydraulic Advance Workbook SamplePhuoc Tho TuongPas encore d'évaluation
- Zelio Brochure EngDocument12 pagesZelio Brochure EngCesar GutierrezPas encore d'évaluation
- Poweflex 400 User Manual PDFDocument218 pagesPoweflex 400 User Manual PDFRichie ChicolPas encore d'évaluation
- Catalog - Essential Guide of Control Panel PDFDocument172 pagesCatalog - Essential Guide of Control Panel PDFMircea MurarPas encore d'évaluation
- Nordson EFD E Series Operating ManualDocument132 pagesNordson EFD E Series Operating ManualTreborPas encore d'évaluation
- Allen Bradley's PLC Programming HandbookDocument81 pagesAllen Bradley's PLC Programming HandbookSenthil ParasuramPas encore d'évaluation
- Rohm Lathe ChucksDocument91 pagesRohm Lathe ChucksNebojša ObradovićPas encore d'évaluation
- PCS7 APL Styleguide en EN en-US PDFDocument130 pagesPCS7 APL Styleguide en EN en-US PDFcc_bauPas encore d'évaluation
- PLC DVP28SV11TDocument20 pagesPLC DVP28SV11TSarah DoylePas encore d'évaluation
- CPU 410 en en-USDocument422 pagesCPU 410 en en-USHammad AshrafPas encore d'évaluation
- PLC-controlled Stepper Motor Drive For NC PositionDocument10 pagesPLC-controlled Stepper Motor Drive For NC PositiondeoarshiPas encore d'évaluation
- SIMATIC S7 + TIA Function BlocksDocument109 pagesSIMATIC S7 + TIA Function BlocksVladimirAgeevPas encore d'évaluation
- PracticesGuide PID Rev.A enDocument22 pagesPracticesGuide PID Rev.A enveithungengPas encore d'évaluation
- PID Furnace Temp ControlDocument11 pagesPID Furnace Temp ControlashishPas encore d'évaluation
- PID UnilogicDocument4 pagesPID Unilogicdaniel contrerasPas encore d'évaluation
- 02 PIDcontroller PDFDocument5 pages02 PIDcontroller PDFZugravu AndreiPas encore d'évaluation
- XGT PID (English But Sample Program)Document12 pagesXGT PID (English But Sample Program)IsmailPas encore d'évaluation
- Enhanced PID For Air Compressors F7 Drive Software Technical ManualDocument17 pagesEnhanced PID For Air Compressors F7 Drive Software Technical ManualRodrigo Jofré ZepedaPas encore d'évaluation
- PracticalDocument10 pagesPracticalSec ArcPas encore d'évaluation
- SJ/L100/300 SERIES: Pid Control Users' GuideDocument16 pagesSJ/L100/300 SERIES: Pid Control Users' GuideawatsiemensPas encore d'évaluation
- Do 4530126590Document1 pageDo 4530126590Victor YosafatPas encore d'évaluation
- Do Id028368Document1 pageDo Id028368Victor YosafatPas encore d'évaluation
- Winder2 - Upgrade TCL PG R2Document17 pagesWinder2 - Upgrade TCL PG R2Victor YosafatPas encore d'évaluation
- GRAPH BackDocument1 pageGRAPH BackVictor YosafatPas encore d'évaluation
- GRAPH 08eDocument16 pagesGRAPH 08eVictor Yosafat0% (1)
- SAPTADocument3 pagesSAPTAVictor YosafatPas encore d'évaluation
- Compatibility of SIMATIC WinCC V7.x, V6.x and V5.xDocument2 pagesCompatibility of SIMATIC WinCC V7.x, V6.x and V5.xVictor YosafatPas encore d'évaluation
- 6ES73172FK140AB0 Datasheet en PDFDocument14 pages6ES73172FK140AB0 Datasheet en PDFVictor YosafatPas encore d'évaluation
- Varispeed g7Document499 pagesVarispeed g7Victor YosafatPas encore d'évaluation
- GRAPH 07e PDFDocument7 pagesGRAPH 07e PDFVictor YosafatPas encore d'évaluation
- GRAPH 07e PDFDocument7 pagesGRAPH 07e PDFVictor YosafatPas encore d'évaluation
- S7komp BDocument29 pagesS7komp BVictor YosafatPas encore d'évaluation
- Chonche ThouetDocument1 pageChonche ThouetVictor YosafatPas encore d'évaluation
- Graph CoverDocument1 pageGraph CoverRitesh SharmaPas encore d'évaluation
- Sending Emails Over Secure Email Connections With S7-1500 and S7-1200 PDFDocument38 pagesSending Emails Over Secure Email Connections With S7-1500 and S7-1200 PDFVictor YosafatPas encore d'évaluation
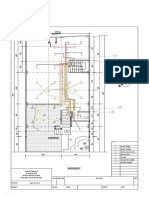
- Basement PDFDocument1 pageBasement PDFVictor YosafatPas encore d'évaluation
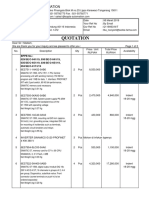
- Invoice Instalasi Runtime PC PDFDocument1 pageInvoice Instalasi Runtime PC PDFVictor YosafatPas encore d'évaluation
- FAQ 77 Establish Iseries S7-1200V4.0 Communication en PDFDocument7 pagesFAQ 77 Establish Iseries S7-1200V4.0 Communication en PDFjotaruiz30Pas encore d'évaluation
- S7komp BDocument29 pagesS7komp BVictor YosafatPas encore d'évaluation
- Overview Fa PDFDocument1 pageOverview Fa PDFVictor YosafatPas encore d'évaluation
- S7komp BDocument29 pagesS7komp BVictor YosafatPas encore d'évaluation
- Hardware PDFDocument11 pagesHardware PDFVictor YosafatPas encore d'évaluation
- Sending Emails Over Secure Email Connections With S7-1500 and S7-1200Document1 pageSending Emails Over Secure Email Connections With S7-1500 and S7-1200Victor YosafatPas encore d'évaluation
- TempDocument1 pageTempVictor YosafatPas encore d'évaluation
- PLC Basic Programme BookDocument45 pagesPLC Basic Programme Bookapi-384889275% (4)
- PDF DocumentationDocument39 pagesPDF DocumentationVictor YosafatPas encore d'évaluation
- Epbb2 1 c128 PDFDocument188 pagesEpbb2 1 c128 PDFVictor YosafatPas encore d'évaluation
- Communication Profibus-Fms: Automation and DrivesDocument1 pageCommunication Profibus-Fms: Automation and DrivesVictor YosafatPas encore d'évaluation
- PhotodetectorsDocument46 pagesPhotodetectorsShivam AgarwalPas encore d'évaluation
- PLUS+1® Controllers MC050-055 and MC050-05B: Data SheetDocument2 pagesPLUS+1® Controllers MC050-055 and MC050-05B: Data SheetMarcos AraujoPas encore d'évaluation
- Model Yia Absorption Chillers: Renewal PartsDocument12 pagesModel Yia Absorption Chillers: Renewal PartsArshad MahmoodPas encore d'évaluation
- May 2010 CSRA TXT NewsletterDocument6 pagesMay 2010 CSRA TXT NewsletterChicago Suburban Radio AssociationPas encore d'évaluation
- ZWD-PAF Series: 100W To 440W Dual Output Power SuppliesDocument2 pagesZWD-PAF Series: 100W To 440W Dual Output Power SuppliesJOSEPH DIASPas encore d'évaluation
- Microsonic Zws-24 CD QSDocument10 pagesMicrosonic Zws-24 CD QSrocidiazPas encore d'évaluation
- Littelfuse Thyristor MAC228A D Datasheet PDFDocument5 pagesLittelfuse Thyristor MAC228A D Datasheet PDFHamid AbdPas encore d'évaluation
- E5CC+E5EC+E5AC 800 - DataSheet - H179 E1 04Document40 pagesE5CC+E5EC+E5AC 800 - DataSheet - H179 E1 04Dangthieuhoi Vu100% (1)
- 2 Vias-EgoDocument10 pages2 Vias-Egoleonardo osmelPas encore d'évaluation
- Troubleshooting Guide: Manual No: 577014-010 Revision: ADocument13 pagesTroubleshooting Guide: Manual No: 577014-010 Revision: AVERY SYAYIDINAPas encore d'évaluation
- 6164 Keypad AdemcoDocument4 pages6164 Keypad AdemcoMiguel Angel Arciniega MartinezPas encore d'évaluation
- Testing Electronic ComponentsDocument98 pagesTesting Electronic Componentshajasoftware100% (3)
- New Features Guide: ETAP 12.5 - Our Most Powerful Version YetDocument12 pagesNew Features Guide: ETAP 12.5 - Our Most Powerful Version YetAwanRizky1Pas encore d'évaluation
- 1734 Um018 - en e PDFDocument130 pages1734 Um018 - en e PDFFERNANDOPas encore d'évaluation
- Digital InstrumentsDocument65 pagesDigital InstrumentsPramod PathadePas encore d'évaluation
- ITC242 Spring Exam QuestionsDocument18 pagesITC242 Spring Exam Questionspriyasingh1682Pas encore d'évaluation
- Course: Manufacturing Science Lecture No.: 15 Arc Welding Power SourceDocument10 pagesCourse: Manufacturing Science Lecture No.: 15 Arc Welding Power SourcezombiePas encore d'évaluation
- Ansi C57.12.52Document18 pagesAnsi C57.12.52Jose DiazPas encore d'évaluation
- Job Sheet 1Document5 pagesJob Sheet 1Sue AzizPas encore d'évaluation
- ATX IO Implementations 11Document11 pagesATX IO Implementations 11周志杰Pas encore d'évaluation
- Magneto Ignition SystemDocument3 pagesMagneto Ignition SystemsameerPas encore d'évaluation
- E&IDocument4 pagesE&IVenkata Rama KrishnaPas encore d'évaluation
- Ultrasonic Rangefinder Using 8051Document25 pagesUltrasonic Rangefinder Using 8051Kaos Polos Nakira50% (4)
- Lse9901b1260-Lishin Elec SpecDocument9 pagesLse9901b1260-Lishin Elec SpecRobertContrerasPas encore d'évaluation
- Multifunction Meter MFM376-230V: FeaturesDocument2 pagesMultifunction Meter MFM376-230V: Featuresdeepak_singla227Pas encore d'évaluation
- Knee Point Voltage of Current Transformer PS ClassDocument6 pagesKnee Point Voltage of Current Transformer PS ClassNitesh patyalPas encore d'évaluation
- Kenwood - TK-2000E - 3000E - BrochureDocument2 pagesKenwood - TK-2000E - 3000E - BrochureAndriantsoa HeritianaPas encore d'évaluation
- My ModulesDocument273 pagesMy Modules1100% (1)
- AN4326Document14 pagesAN4326hnooriPas encore d'évaluation
- High-Band Base Station AntennaDocument3 pagesHigh-Band Base Station AntennaGiang Nguyễn TrườngPas encore d'évaluation