Vous aimerez peut-être aussi
- Secuenciales caja fuerteDocument16 pagesSecuenciales caja fuerteWilmer Guaño100% (1)
- DigitalesDocument8 pagesDigitalesCris Choso ErazoPas encore d'évaluation
- Ejercicio 3 1Document21 pagesEjercicio 3 1Cris Choso ErazoPas encore d'évaluation
- Los Grupos de Interés ExternosDocument2 pagesLos Grupos de Interés ExternosCris Choso ErazoPas encore d'évaluation
- LaplaceDocument1 pageLaplaceCris Choso ErazoPas encore d'évaluation
- Ejercicio 3 1Document21 pagesEjercicio 3 1Cris Choso ErazoPas encore d'évaluation
- HidraDocument1 pageHidraCris Choso ErazoPas encore d'évaluation
- Data PathDocument1 pageData PathCris Choso ErazoPas encore d'évaluation
- Trabajo Investigativo NTFS EXT Erazo CristianDocument5 pagesTrabajo Investigativo NTFS EXT Erazo CristianCris Choso ErazoPas encore d'évaluation
- Producto 8 CAD 652 765Document2 pagesProducto 8 CAD 652 765Cris Choso ErazoPas encore d'évaluation
- Guia de Practica 02 - SCRsDocument2 pagesGuia de Practica 02 - SCRsCris Choso ErazoPas encore d'évaluation
- Sensores Temperatura PDFDocument29 pagesSensores Temperatura PDFCris Choso ErazoPas encore d'évaluation
- 84923910037Document9 pages84923910037molinero_01Pas encore d'évaluation
- Auto Cuestionario Cristian-ErazoDocument6 pagesAuto Cuestionario Cristian-ErazoCris Choso ErazoPas encore d'évaluation
- Controlador AC ACDocument1 pageControlador AC ACCris Choso ErazoPas encore d'évaluation
- FundamentosDocument9 pagesFundamentosCris Choso ErazoPas encore d'évaluation
- Exposicion MotoresDCDocument23 pagesExposicion MotoresDCCris Choso ErazoPas encore d'évaluation
- Tablas LumiDocument1 pageTablas LumiCris Choso ErazoPas encore d'évaluation
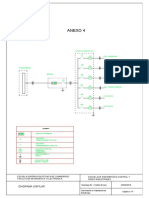
- Diseño Casa UnifialrDocument1 pageDiseño Casa UnifialrCris Choso ErazoPas encore d'évaluation
- Casa Con Capas-ModeloDocument1 pageCasa Con Capas-ModeloCris Choso ErazoPas encore d'évaluation
- Diagrama Unifilar - 1Document10 pagesDiagrama Unifilar - 1Cris Choso ErazoPas encore d'évaluation
- Contactores Retraso AdealntoDocument2 pagesContactores Retraso AdealntoCris Choso ErazoPas encore d'évaluation
- ElectronicaDocument3 pagesElectronicaCris Choso ErazoPas encore d'évaluation
- Codigo Deontologico GrupalDocument4 pagesCodigo Deontologico GrupalCris Choso ErazoPas encore d'évaluation
- Micro Concrol AdoresDocument14 pagesMicro Concrol AdoresCris Choso ErazoPas encore d'évaluation
- 2018 01 11 Pliego y Cargos Tarifarios Del SPEE 20182Document34 pages2018 01 11 Pliego y Cargos Tarifarios Del SPEE 20182Ivan Sanchez LoorPas encore d'évaluation
- AnesssDocument1 pageAnesssCris Choso ErazoPas encore d'évaluation
- Flip Flop JK DDocument9 pagesFlip Flop JK DCris Choso ErazoPas encore d'évaluation
- Metodos InterativosDocument7 pagesMetodos Interativoscradle_of_slipknot07Pas encore d'évaluation
- Placas HorizontalesDocument3 pagesPlacas HorizontalesMario RojasPas encore d'évaluation
- Apuntes U1 U2 U3Document110 pagesApuntes U1 U2 U3Mati MontenegroPas encore d'évaluation
- Fuerza en contrafuerte presa MEF115Document12 pagesFuerza en contrafuerte presa MEF115Rómulo OrellanaPas encore d'évaluation
- Lab04 Leyes de Kirchhoff v2 2020ago TinkercadDocument11 pagesLab04 Leyes de Kirchhoff v2 2020ago TinkercadDusyan Jairo HCPas encore d'évaluation
- Termodinámica: Leyes, Máquinas y CálculosDocument4 pagesTermodinámica: Leyes, Máquinas y CálculosOscar MerinoPas encore d'évaluation
- Capacitación #4 PDFDocument119 pagesCapacitación #4 PDFVITALAGUA100% (1)
- Ensayo de Tension IndirectaDocument10 pagesEnsayo de Tension IndirectayskkcresPas encore d'évaluation
- Principios Basicos de La MecánicaDocument16 pagesPrincipios Basicos de La Mecánicaisable lopezPas encore d'évaluation
- Informe 3 Fisica 1 UNI FIISDocument12 pagesInforme 3 Fisica 1 UNI FIISYoselinFernandez0% (1)
- Módulo de Young experimentalDocument8 pagesMódulo de Young experimentalSol MirandaPas encore d'évaluation
- Práctica N3Document15 pagesPráctica N3Dennis Tirado ArancibiaPas encore d'évaluation
- Reporte Impacto Traccion y Flexion en MetalesDocument28 pagesReporte Impacto Traccion y Flexion en MetalesAndy ValozPas encore d'évaluation
- El Movimiento BidimensionalDocument4 pagesEl Movimiento BidimensionalCarlos Herrera0% (1)
- Captura 2022-09-13 A Las 11.20.59Document17 pagesCaptura 2022-09-13 A Las 11.20.59promocion426.156Pas encore d'évaluation
- EI Programa GuiaFísicaDocument22 pagesEI Programa GuiaFísicaAxelPas encore d'évaluation
- PVR - AR Etapa 2 - LMEDocument14 pagesPVR - AR Etapa 2 - LMEPatricio VillalpandoPas encore d'évaluation
- Unidad Vi Campos Electricos y Magneticos Que Cambian Con El Tiempo IiDocument49 pagesUnidad Vi Campos Electricos y Magneticos Que Cambian Con El Tiempo Iirasel palaciosPas encore d'évaluation
- Cuestionario Examen Diseño II PDFDocument30 pagesCuestionario Examen Diseño II PDFGhymel TapiasPas encore d'évaluation
- Unidad VI Introduccion Al Flujo de TuberiasDocument12 pagesUnidad VI Introduccion Al Flujo de TuberiasAC Luis ArturoPas encore d'évaluation
- Fuerza centrípeta laboratorio reporteDocument8 pagesFuerza centrípeta laboratorio reportekimberly Jheraldine Fernandez BardalesPas encore d'évaluation
- Movimientos de partículas y vehículos definidos por funciones de posición, velocidad y aceleraciónDocument21 pagesMovimientos de partículas y vehículos definidos por funciones de posición, velocidad y aceleraciónEstuardo PérezPas encore d'évaluation
- Hidraulica de Canales PDFDocument35 pagesHidraulica de Canales PDFRuben ArguedasPas encore d'évaluation
- Pandeo 2020 - Clase 2Document33 pagesPandeo 2020 - Clase 2Lautaro AlonsoPas encore d'évaluation
- Elemento Viga de TimoshenkoDocument11 pagesElemento Viga de TimoshenkoLuis Adriano Acosta Pechene100% (1)
- Embrague Mecànico de FricciònDocument88 pagesEmbrague Mecànico de FricciònAnthony DaríoPas encore d'évaluation
- Hoja de Trabajo Mru y MruvDocument16 pagesHoja de Trabajo Mru y MruvSalvador Roman AlvaradoPas encore d'évaluation
- Laboratorio 4 Fisica 2Document15 pagesLaboratorio 4 Fisica 2alwycPas encore d'évaluation
- Universidad de Piura: TeoriaDocument4 pagesUniversidad de Piura: TeoriaArturo Karlinger Inga RiosPas encore d'évaluation
- Din Clase 0313 - Cinas de La Part - vCLASEDocument67 pagesDin Clase 0313 - Cinas de La Part - vCLASEI H8 U DÉCÈSPas encore d'évaluation
- Capa LimiteDocument23 pagesCapa LimiteRonald CordovaPas encore d'évaluation