Vous aimerez peut-être aussi
- gPROMs软件介绍Document52 pagesgPROMs软件介绍sdrtfgPas encore d'évaluation
- Ceng204P Separation Processes I Coursework 1: 1. Problem DescriptionDocument3 pagesCeng204P Separation Processes I Coursework 1: 1. Problem DescriptionKaren Chong Yap100% (1)
- GpromsDocument16 pagesGpromsaminPas encore d'évaluation
- Aiche09 Gproms Proii CoDocument17 pagesAiche09 Gproms Proii Cokashin09Pas encore d'évaluation
- CEP - Modeling Reactive AbsorptionDocument9 pagesCEP - Modeling Reactive Absorptionnp484Pas encore d'évaluation
- Final ThesisDocument35 pagesFinal ThesisAnderson Santos MoraisPas encore d'évaluation
- 4528.R380.02 Slide Handout For StudentsDocument62 pages4528.R380.02 Slide Handout For StudentsCiputra 'Boy' TampubolonPas encore d'évaluation
- SimSinter gPROMS Technical Manual PDFDocument50 pagesSimSinter gPROMS Technical Manual PDFLỢI NGUYỄN CÔNG0% (1)
- Introduction To Chemical Process SimulatorsDocument12 pagesIntroduction To Chemical Process Simulatorsanand upadhyayPas encore d'évaluation
- Lecture 1 - Intro To Process SimulationDocument48 pagesLecture 1 - Intro To Process SimulationSJ ChuaPas encore d'évaluation
- ECUST PROII Advanced TrainingDocument118 pagesECUST PROII Advanced Trainingbakhtyar21100% (2)
- Aspen ConvergenceDocument40 pagesAspen ConvergenceKaushal SampatPas encore d'évaluation
- Process Modeling Lecture 1Document41 pagesProcess Modeling Lecture 1Virginia ElenaPas encore d'évaluation
- Lecture 3 - Flowsheeting in GPROMSDocument18 pagesLecture 3 - Flowsheeting in GPROMSEverton CollingPas encore d'évaluation
- Reactions and Separations Simulations: 3 Key IssuesDocument7 pagesReactions and Separations Simulations: 3 Key Issuesken910076100% (1)
- GPROMS - Developing Custom Unit Operation ModelsDocument164 pagesGPROMS - Developing Custom Unit Operation ModelsBamrung SungnoenPas encore d'évaluation
- Use of Dynamic Simulation To ConvergeDocument8 pagesUse of Dynamic Simulation To ConvergeneftPas encore d'évaluation
- Customizing RADFRAC ConvergenceDocument22 pagesCustomizing RADFRAC ConvergenceSurya Budi Widagdo75% (4)
- Process Simulation Essentials - Example Book PDFDocument60 pagesProcess Simulation Essentials - Example Book PDFhamzashafiq1100% (1)
- Introduction to Chemical Process Simulators and DWSIMDocument22 pagesIntroduction to Chemical Process Simulators and DWSIMmarkoPas encore d'évaluation
- ACM gPROMS Thesis PDFDocument130 pagesACM gPROMS Thesis PDFejaz924nPas encore d'évaluation
- Dynamic Simulation PDE ModelDocument25 pagesDynamic Simulation PDE ModelEverton CollingPas encore d'évaluation
- Seoul National University - Process Modeling Using Aspen PlusDocument76 pagesSeoul National University - Process Modeling Using Aspen PlusaftenteaPas encore d'évaluation
- Rate-Based Modeling For CO2 AbsorptionDocument10 pagesRate-Based Modeling For CO2 AbsorptiongoingtohellwithmePas encore d'évaluation
- Fortran User ModelDocument20 pagesFortran User ModelkingboboPas encore d'évaluation
- CHE 4170 Design Project HYSYSDocument16 pagesCHE 4170 Design Project HYSYSPhan NeePas encore d'évaluation
- HySys Sizing User GuideDocument134 pagesHySys Sizing User GuideMusa MohammedPas encore d'évaluation
- Modeling and Simulation of A Distillation Column Using ASPEN PLUS Libre PDFDocument9 pagesModeling and Simulation of A Distillation Column Using ASPEN PLUS Libre PDFmehul10941Pas encore d'évaluation
- En Analysis of Thermal Efficiency Limit of Steam Methane Reforming ProcessDocument8 pagesEn Analysis of Thermal Efficiency Limit of Steam Methane Reforming ProcessAgam HanasichulaPas encore d'évaluation
- GORUN User GuideDocument16 pagesGORUN User GuideLeynard NatividadPas encore d'évaluation
- Lec SimulationDocument80 pagesLec SimulationDr Tajammal MunirPas encore d'évaluation
- Predict Distillation Tray Efficiency: Reactions and SeparationsDocument7 pagesPredict Distillation Tray Efficiency: Reactions and SeparationsJohn AnthoniPas encore d'évaluation
- Simulation of Reactors and Heaters Coolers Using HYSYSDocument21 pagesSimulation of Reactors and Heaters Coolers Using HYSYSVonbait100% (2)
- Rate-Based NaOH ModelDocument21 pagesRate-Based NaOH Modelniawd100% (3)
- 1.1 Questions: D N Y DD NN YYDocument4 pages1.1 Questions: D N Y DD NN YYEverton CollingPas encore d'évaluation
- Real-World-Modeling PDFDocument12 pagesReal-World-Modeling PDFGATOMICOPas encore d'évaluation
- Modeling Chemical Processes (CHN-302Document20 pagesModeling Chemical Processes (CHN-302AKMPas encore d'évaluation
- NN Distillation ColumnDocument5 pagesNN Distillation ColumnguillermocochaPas encore d'évaluation
- Cascade ControlDocument17 pagesCascade Controlمحمد سلامPas encore d'évaluation
- Fluid Flow and Simulation SoftwaresDocument57 pagesFluid Flow and Simulation Softwaressri9987100% (1)
- EXP 2 - Plug Flow Tubular ReactorDocument18 pagesEXP 2 - Plug Flow Tubular ReactorOng Jia YeePas encore d'évaluation
- TeDocument67 pagesTeYudha Sanditya SaputraPas encore d'évaluation
- ADSORPTION MODELING AND SIMULATIONDocument38 pagesADSORPTION MODELING AND SIMULATIONAtul TripathiPas encore d'évaluation
- Membrane Aspen SimulationDocument7 pagesMembrane Aspen Simulationjeffbush23Pas encore d'évaluation
- Vessel Depressurization ModelingDocument14 pagesVessel Depressurization ModelingemaengPas encore d'évaluation
- Aspen Hysys Reactive DistillationDocument10 pagesAspen Hysys Reactive DistillationAGP100% (1)
- Process Temperature Control Using PID and LabVIEWDocument17 pagesProcess Temperature Control Using PID and LabVIEWManish SinghPas encore d'évaluation
- Distillation Column Control Design Using Steady StateDocument18 pagesDistillation Column Control Design Using Steady Stateb95504048Pas encore d'évaluation
- Simulink Development of Single Effect Evaporator Using MatlabDocument12 pagesSimulink Development of Single Effect Evaporator Using MatlabRhea MambaPas encore d'évaluation
- Aspen Hysys Dynamics Process ControlDocument6 pagesAspen Hysys Dynamics Process ControlAkhi Sofi0% (1)
- Simulating Recycle StreamsDocument57 pagesSimulating Recycle StreamsKin Wai Cheah75% (4)
- Distillation Columns Risk Assessment When The Regular Hazop Evaluation Is Not EnoughDocument7 pagesDistillation Columns Risk Assessment When The Regular Hazop Evaluation Is Not Enoughmyusuf_engineerPas encore d'évaluation
- Statistics for Process Control Engineers: A Practical ApproachD'EverandStatistics for Process Control Engineers: A Practical ApproachPas encore d'évaluation
- High-Pressure Fluid Phase Equilibria: Phenomenology and ComputationD'EverandHigh-Pressure Fluid Phase Equilibria: Phenomenology and ComputationPas encore d'évaluation
- Computational Techniques for Chemical Engineers: International Series of Monographs in Chemical EngineeringD'EverandComputational Techniques for Chemical Engineers: International Series of Monographs in Chemical EngineeringPas encore d'évaluation
- Vapor-Liquid Equilibria Using Unifac: A Group-Contribution MethodD'EverandVapor-Liquid Equilibria Using Unifac: A Group-Contribution MethodPas encore d'évaluation
- Process Engineering for a Small Planet: How to Reuse, Re-Purpose, and Retrofit Existing Process EquipmentD'EverandProcess Engineering for a Small Planet: How to Reuse, Re-Purpose, and Retrofit Existing Process EquipmentPas encore d'évaluation
- International OrganisationDocument2 pagesInternational Organisationraj1067Pas encore d'évaluation
- A To Z of Silent Letters PDFDocument17 pagesA To Z of Silent Letters PDFLeônidas ZazelisPas encore d'évaluation
- One Word SubstitutionDocument11 pagesOne Word Substitutionraj1067100% (1)
- One Word SubstitutionDocument11 pagesOne Word Substitutionraj1067100% (1)
- English ErrorsDocument29 pagesEnglish Errorsraj10670% (1)
- English ErrorsDocument29 pagesEnglish Errorsraj10670% (1)
- Face Recognition Landmarks and 3D ModelingDocument15 pagesFace Recognition Landmarks and 3D ModelingnvadadaPas encore d'évaluation
- NIPO ODIN 5 (1) .11 CommandReference Rev20070123Document302 pagesNIPO ODIN 5 (1) .11 CommandReference Rev20070123Mihaela CanciucPas encore d'évaluation
- Admit Card: Araksha Bhavan (5Th Floor), 6Th Cross Road, Block-Dj, Sector-Ii, Salt Lake City, Kolkata-700 091Document1 pageAdmit Card: Araksha Bhavan (5Th Floor), 6Th Cross Road, Block-Dj, Sector-Ii, Salt Lake City, Kolkata-700 091Rafikul AlamPas encore d'évaluation
- Python ScriptDocument8 pagesPython ScripteliotroyanoPas encore d'évaluation
- Nathan Barry - The App Design Handbook-The Pragmatic Programmers (2013)Document126 pagesNathan Barry - The App Design Handbook-The Pragmatic Programmers (2013)Leandro Alberto Villanueva MancillaPas encore d'évaluation
- UntitledDocument2 pagesUntitledListen MePas encore d'évaluation
- Gamification in MarketingDocument8 pagesGamification in MarketingAcademic JournalPas encore d'évaluation
- Avago Storage Cable GuideDocument2 pagesAvago Storage Cable Guideakok22Pas encore d'évaluation
- Chapter 12 Functions1Document10 pagesChapter 12 Functions1Gagan CPas encore d'évaluation
- Design and Manufacture of Underwater Rov (Remotely Operated Vehicle)Document25 pagesDesign and Manufacture of Underwater Rov (Remotely Operated Vehicle)Albert TomyPas encore d'évaluation
- Web Service Model To Adaptive Web Service ModelDocument18 pagesWeb Service Model To Adaptive Web Service ModelDiegoPas encore d'évaluation
- Security Officers Certificate Renewal Process Manual v01Document10 pagesSecurity Officers Certificate Renewal Process Manual v01Johan SbusisoPas encore d'évaluation
- ASV Program Guide v4.0r2Document55 pagesASV Program Guide v4.0r2ShirazspsPas encore d'évaluation
- Ser Manual: FREE VersionDocument107 pagesSer Manual: FREE VersionJose SalazarPas encore d'évaluation
- PMC-680i & 670 Catalogue (20200819S)Document8 pagesPMC-680i & 670 Catalogue (20200819S)Ronald H SantosPas encore d'évaluation
- Esim ProgrammerDocument198 pagesEsim ProgrammerWeslley MouraPas encore d'évaluation
- Business Conduct PolicyDocument19 pagesBusiness Conduct PolicySarah Mae De Los ReyesPas encore d'évaluation
- PR 6423/.. Series: Eddy Current Displacement SensorDocument4 pagesPR 6423/.. Series: Eddy Current Displacement SensorMohamad YusufPas encore d'évaluation
- Electronic Fuel Management Systems: Making Sure You're in Complete Control, From Anywhere, All The TimeDocument50 pagesElectronic Fuel Management Systems: Making Sure You're in Complete Control, From Anywhere, All The Timesaba0707Pas encore d'évaluation
- Template Entrust CVDocument3 pagesTemplate Entrust CVAbdul HadiPas encore d'évaluation
- History Of: Submitted By: Group No.04Document15 pagesHistory Of: Submitted By: Group No.04Rahul RawlaniPas encore d'évaluation
- CS 100 Lab 6 TasksDocument4 pagesCS 100 Lab 6 TasksHassan WaqarPas encore d'évaluation
- Registration Guidelines DrugDocument17 pagesRegistration Guidelines DrugExim ConsultantsPas encore d'évaluation
- X20 Module - Bus Modules - BM01Document2 pagesX20 Module - Bus Modules - BM01JEYSONPas encore d'évaluation
- Humphrey Field Analyzer 3 From ZEISS: The Best Just Got BetterDocument10 pagesHumphrey Field Analyzer 3 From ZEISS: The Best Just Got BetterFreePas encore d'évaluation
- Chapter 2 ERPDocument36 pagesChapter 2 ERPHassan ElbayyaPas encore d'évaluation
- Research Methodology: Assignment 4Document9 pagesResearch Methodology: Assignment 4Softech PkPas encore d'évaluation
- Datasheet RUTX09 v1.4Document2 pagesDatasheet RUTX09 v1.4GuilhermeDeOliveiraSantosPas encore d'évaluation
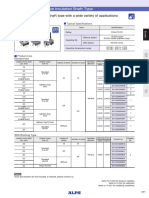
- EC12E EC12D: 12mm Size Insulated Shaft TypeDocument6 pagesEC12E EC12D: 12mm Size Insulated Shaft TypeAndy DantePas encore d'évaluation
- Software Requirements Document For UberDocument5 pagesSoftware Requirements Document For Ubermohammadakram9351Pas encore d'évaluation