Vous aimerez peut-être aussi
- Servo Motor Selection For UAVDocument9 pagesServo Motor Selection For UAVUAV Society100% (1)
- AD&D - Forgotten Realms - Menzoberranzan - EXTRAS - House Do'Urden RestrospectiveDocument16 pagesAD&D - Forgotten Realms - Menzoberranzan - EXTRAS - House Do'Urden RestrospectiveThiago RaulinoPas encore d'évaluation
- Servo MotorsDocument8 pagesServo MotorsFairos ZakariahPas encore d'évaluation
- What Is Servo Motor Servomotor: Rotary Actuator Linear ActuatorDocument11 pagesWhat Is Servo Motor Servomotor: Rotary Actuator Linear ActuatorThe-kiros HadushPas encore d'évaluation
- Pnbcontr0223en (Web)Document308 pagesPnbcontr0223en (Web)James GeorgePas encore d'évaluation
- Servo MotorDocument31 pagesServo Motoradiamiru25% (4)
- How Do Servo Motors Work: This Little Motor Is High in Efficiency and PowerDocument8 pagesHow Do Servo Motors Work: This Little Motor Is High in Efficiency and PowerSubham GhoshPas encore d'évaluation
- Control of DC Motor Using Different Control StrategiesD'EverandControl of DC Motor Using Different Control StrategiesPas encore d'évaluation
- 2011 33 MaintenanceDocument16 pages2011 33 MaintenanceKrishna Khandige100% (1)
- Basics of Servo System and SimulationDocument45 pagesBasics of Servo System and Simulationgk_gbu100% (1)
- Servo MotorDocument15 pagesServo MotorShivshankar GhugePas encore d'évaluation
- Servo Motor - Types, Construction, Working, Controlling & ApplicationsDocument7 pagesServo Motor - Types, Construction, Working, Controlling & ApplicationsAHMED YOUSEFPas encore d'évaluation
- Scattered Pearls: Selected Sayings and Anecdotes of The Illustrious AuliyaaDocument103 pagesScattered Pearls: Selected Sayings and Anecdotes of The Illustrious AuliyaaYeye17100% (1)
- Final PresentationDocument103 pagesFinal PresentationQasir NawazPas encore d'évaluation
- L15 - Parallel Magnetic CircuitsDocument6 pagesL15 - Parallel Magnetic CircuitsParikshit MishraPas encore d'évaluation
- Servo MotorsDocument27 pagesServo Motorsc_archana100% (1)
- Anti-Cellulite: Endermologie TreatmentDocument8 pagesAnti-Cellulite: Endermologie TreatmentMinu CatalinPas encore d'évaluation
- Servo Motor - Servo Mechanism - Theory and Working PrincipleDocument6 pagesServo Motor - Servo Mechanism - Theory and Working PrincipleBrahmanand SinghPas encore d'évaluation
- Servo MotorDocument11 pagesServo MotorBotlhe SomolekaePas encore d'évaluation
- Brenda Patton Guided Reflection QuestionsDocument3 pagesBrenda Patton Guided Reflection QuestionsCameron JanzenPas encore d'évaluation
- Servo Motor Control Using 8051Document11 pagesServo Motor Control Using 8051Rajesh RavindranPas encore d'évaluation
- ServomechanismDocument4 pagesServomechanismamuthanecePas encore d'évaluation
- Whats A ServoDocument3 pagesWhats A ServoShyam ParthasarathyPas encore d'évaluation
- Whats A Servo?: (Click On Picture For Larger View)Document8 pagesWhats A Servo?: (Click On Picture For Larger View)Dhana SingarajaPas encore d'évaluation
- ServoDocument7 pagesServohaaenPas encore d'évaluation
- Differences Between Stepper Motors and Servo MotorsDocument1 pageDifferences Between Stepper Motors and Servo MotorsazharzebPas encore d'évaluation
- A ServomechanismDocument3 pagesA ServomechanismChaitanya Kumar GPas encore d'évaluation
- LAB 2-AngeladaDocument20 pagesLAB 2-AngeladaAlehamarie AngeladaPas encore d'évaluation
- Screw 4Document6 pagesScrew 4Dhana SingarajaPas encore d'évaluation
- Servo?: (Click On Picture For Larger View)Document8 pagesServo?: (Click On Picture For Larger View)Dhana SingarajaPas encore d'évaluation
- Click On Picture For Larger ViewDocument7 pagesClick On Picture For Larger ViewDhana SingarajaPas encore d'évaluation
- Insight Stepper MotorDocument8 pagesInsight Stepper MotorKarri AmarnathPas encore d'évaluation
- Whats A Servo?: (Click On Picture For Larger View)Document8 pagesWhats A Servo?: (Click On Picture For Larger View)Dhana SingarajaPas encore d'évaluation
- Advanced Technology - How Is The Servo Controlled 2015 10 11Document1 pageAdvanced Technology - How Is The Servo Controlled 2015 10 11api-288292935Pas encore d'évaluation
- ServoDocument5 pagesServoAjay Prinston PintoPas encore d'évaluation
- Servo Motors Types and ApplicationsDocument22 pagesServo Motors Types and ApplicationsJavierPas encore d'évaluation
- Servo Motor - EngineersgarageDocument10 pagesServo Motor - EngineersgarageanggotaPas encore d'évaluation
- Servo MotorDocument21 pagesServo MotorsafvanshaikhPas encore d'évaluation
- Servo Motor and Quadrature EncoderDocument8 pagesServo Motor and Quadrature EncoderAmmar YounasPas encore d'évaluation
- Screw 5Document6 pagesScrew 5Dhana SingarajaPas encore d'évaluation
- Servo Motor Speed and Direction ControlDocument7 pagesServo Motor Speed and Direction Controltazeb100% (1)
- Servo MotorDocument21 pagesServo MotoribrahimPas encore d'évaluation
- Servo MotorDocument21 pagesServo Motorthreephasefault100% (1)
- Mechatronics Lab Assignment: Servo MotorsDocument3 pagesMechatronics Lab Assignment: Servo MotorsNavendu GuptaPas encore d'évaluation
- Answer For QuestionDocument4 pagesAnswer For QuestionMohd AmerPas encore d'évaluation
- DC Stepper Servo MotorsDocument2 pagesDC Stepper Servo MotorsidatscribdPas encore d'évaluation
- DifferenceDocument3 pagesDifferencemoh300Pas encore d'évaluation
- How It Works: How Servo Motors WorkDocument2 pagesHow It Works: How Servo Motors WorkChirkov Kire100% (1)
- Servo MotorDocument4 pagesServo MotorWasil BabarPas encore d'évaluation
- Experiment No. 02: DR D Y Patil School of Engineering & TechnologyDocument3 pagesExperiment No. 02: DR D Y Patil School of Engineering & Technologypradnya sadigalePas encore d'évaluation
- Experiment No. 02: DR D Y Patil School of Engineering & TechnologyDocument3 pagesExperiment No. 02: DR D Y Patil School of Engineering & Technologypradnya sadigalePas encore d'évaluation
- Actuators - Servos: Modify A Servo Waterproof A ServoDocument8 pagesActuators - Servos: Modify A Servo Waterproof A ServoManoj KavediaPas encore d'évaluation
- Servo MotorDocument3 pagesServo Motormuneeb saeedPas encore d'évaluation
- Unit 5Document30 pagesUnit 5kruthikaPas encore d'évaluation
- Introduction Robot Drive SystemsDocument17 pagesIntroduction Robot Drive SystemsTemesgen100% (2)
- Rain Sensing Automatic Car Wiper: Block DiagramDocument5 pagesRain Sensing Automatic Car Wiper: Block DiagramKavinPas encore d'évaluation
- Hybrid and ServomotorsDocument8 pagesHybrid and ServomotorsShilpa SweetyPas encore d'évaluation
- What Are Servo MotorsDocument4 pagesWhat Are Servo MotorsSaurabh PrabhakarPas encore d'évaluation
- Brushless Servomotor: Presented byDocument16 pagesBrushless Servomotor: Presented byDev KumarPas encore d'évaluation
- ServomechanismDocument4 pagesServomechanismJermaine StrachanPas encore d'évaluation
- Ac-Dc-Servomotor-Net NotesDocument9 pagesAc-Dc-Servomotor-Net NotesDINESHKUMAR SPas encore d'évaluation
- Servo MoDocument10 pagesServo MonatiPas encore d'évaluation
- Lecture 12 - Servo Motor ControlDocument16 pagesLecture 12 - Servo Motor ControlSaad Murad GorayaPas encore d'évaluation
- University of Kirkuk College of Engineering Mechanical DepartmentDocument6 pagesUniversity of Kirkuk College of Engineering Mechanical Departmentعبدالمؤمن خالد محمودPas encore d'évaluation
- Servo Motor WorkDocument3 pagesServo Motor WorkNaveedPas encore d'évaluation
- How Servo Works?: Power Supply: Not Shown in The Block Diagram, But Servo Needs Power Supply To Run. MostDocument4 pagesHow Servo Works?: Power Supply: Not Shown in The Block Diagram, But Servo Needs Power Supply To Run. MostRui Mendes100% (2)
- Welding Inspection Technology: Module 7 - Visual Inspection WorkshopDocument20 pagesWelding Inspection Technology: Module 7 - Visual Inspection Workshoprex valenciaPas encore d'évaluation
- Green Engine 2 PDFDocument7 pagesGreen Engine 2 PDFharivardhanPas encore d'évaluation
- Opti Turn Tu 2004 V ManualDocument80 pagesOpti Turn Tu 2004 V ManualCharu NavneetPas encore d'évaluation
- Genesis of KupferschieferDocument15 pagesGenesis of KupferschieferMaricela GarciaPas encore d'évaluation
- Instant Download Professional Nursing Practice Concepts Perspectives 7th Blais Hayes Test Bank PDF ScribdDocument32 pagesInstant Download Professional Nursing Practice Concepts Perspectives 7th Blais Hayes Test Bank PDF ScribdDanielle Searfoss100% (10)
- Correlation of Body Mass Index With Endometrial Histopathology in Abnormal Uterine BleedingDocument101 pagesCorrelation of Body Mass Index With Endometrial Histopathology in Abnormal Uterine BleedingpritamPas encore d'évaluation
- Computer From ScratchDocument6 pagesComputer From ScratchPaul NavedaPas encore d'évaluation
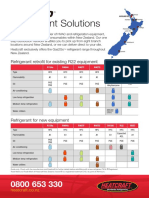
- Refrigerant Solutions: Refrigerant Retrofit For Existing R22 EquipmentDocument2 pagesRefrigerant Solutions: Refrigerant Retrofit For Existing R22 EquipmentpriyoPas encore d'évaluation
- TSBDocument3 pagesTSBnoe dela vegaPas encore d'évaluation
- Ashok Leyland Project ReportDocument40 pagesAshok Leyland Project ReportGovind kumarPas encore d'évaluation
- Rockwell Allen BradleyDocument73 pagesRockwell Allen BradleymaygomezPas encore d'évaluation
- Toda People in IndiaDocument9 pagesToda People in IndiaAmoona KopiKoPas encore d'évaluation
- Chapter - 2 - Unit Hydrograph2Document33 pagesChapter - 2 - Unit Hydrograph2Abhilekh PaudelPas encore d'évaluation
- Attacks On Cryptosystems PDFDocument18 pagesAttacks On Cryptosystems PDFUjjayanta BhaumikPas encore d'évaluation
- Manual TR420 enDocument38 pagesManual TR420 enMari Sherlin Salisi-ChuaPas encore d'évaluation
- Edrolo ch3Document42 pagesEdrolo ch3YvonnePas encore d'évaluation
- Modeling of Conducted EMI (Model Motor Simulink Bun)Document8 pagesModeling of Conducted EMI (Model Motor Simulink Bun)Ioan ŢileaPas encore d'évaluation
- (Q2) Electrochemistry 29th JulyDocument21 pages(Q2) Electrochemistry 29th JulySupritam KunduPas encore d'évaluation
- NavaDocument2 pagesNavasaikiranPas encore d'évaluation
- Beauty Therapy Thesis SampleDocument8 pagesBeauty Therapy Thesis Samplerachelvalenzuelaglendale100% (2)
- Rugelach Recipe From Monday Morning Cooking ClubDocument2 pagesRugelach Recipe From Monday Morning Cooking ClubAnonymous W5F9r2b2hPas encore d'évaluation
- 510 1453 1 PB Tiang ReklameDocument6 pages510 1453 1 PB Tiang ReklameGunaedy UtomoPas encore d'évaluation
- Saberon StratMan2Document3 pagesSaberon StratMan2paredesladyheart18Pas encore d'évaluation