Vous aimerez peut-être aussi
- ES826 - Engenharia Simultânea - TrabalhoDocument8 pagesES826 - Engenharia Simultânea - Trabalholnery_1Pas encore d'évaluation
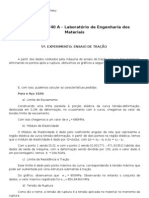
- Lab Materiais - Relatório Exp 1Document4 pagesLab Materiais - Relatório Exp 1lnery_1Pas encore d'évaluation
- ES826 - Engenharia Simultânea - ApresentaçãoDocument10 pagesES826 - Engenharia Simultânea - Apresentaçãolnery_1Pas encore d'évaluation
- Lab Materiais - Relatório Exp 5Document3 pagesLab Materiais - Relatório Exp 5lnery_1Pas encore d'évaluation
- Lab Materiais - Relatório Exp 2Document2 pagesLab Materiais - Relatório Exp 2lnery_1Pas encore d'évaluation
- Lab Materiais - Relatório Exp 3Document2 pagesLab Materiais - Relatório Exp 3lnery_1Pas encore d'évaluation
- Lab Materiais - Relatório Exp 4Document2 pagesLab Materiais - Relatório Exp 4lnery_1Pas encore d'évaluation
- Apostila Controle - 25 - Realimentação de EstadoDocument29 pagesApostila Controle - 25 - Realimentação de Estadolnery_1Pas encore d'évaluation
- Apostila Controle - 21 - Avanço e AtrasoDocument32 pagesApostila Controle - 21 - Avanço e Atrasolnery_1Pas encore d'évaluation
- Apostila Controle - 22 - Projeto Avanço / Atraso AnalíticoDocument33 pagesApostila Controle - 22 - Projeto Avanço / Atraso Analíticolnery_1Pas encore d'évaluation
- Apostila Controle - 23 - Modelagem de EstadoDocument23 pagesApostila Controle - 23 - Modelagem de Estadolnery_1Pas encore d'évaluation
- Apostila Controle - 24 - Modelos CanônicosDocument33 pagesApostila Controle - 24 - Modelos Canônicoslnery_1Pas encore d'évaluation
- Apostila Controle - 19b - Projeto PID Por Zigler NicholsDocument21 pagesApostila Controle - 19b - Projeto PID Por Zigler Nicholslnery_1Pas encore d'évaluation
- Apostila Controle - 20 - Projeto PID AnalíticoDocument37 pagesApostila Controle - 20 - Projeto PID Analíticolnery_1Pas encore d'évaluation
- Apostila Controle - 15c - Rlocus (Lugar Das Raízes)Document11 pagesApostila Controle - 15c - Rlocus (Lugar Das Raízes)lnery_1Pas encore d'évaluation
- Apostila Controle - 15 - Desempenho de Sistemas (Domínio Da Frequência) - Nyquist e NicholsDocument29 pagesApostila Controle - 15 - Desempenho de Sistemas (Domínio Da Frequência) - Nyquist e Nicholslnery_1Pas encore d'évaluation
- Apostila Controle - 16 - Análise de EstabilidadeDocument31 pagesApostila Controle - 16 - Análise de Estabilidadelnery_1Pas encore d'évaluation
- Apostila Controle - 18 - Estabilidade Relativa (MG, MF)Document26 pagesApostila Controle - 18 - Estabilidade Relativa (MG, MF)lnery_1Pas encore d'évaluation
- Apostila Controle - 17 - Análise de Estabilidade (Critério de Nyquist)Document21 pagesApostila Controle - 17 - Análise de Estabilidade (Critério de Nyquist)lnery_1Pas encore d'évaluation
- Apostila Controle - 15b - Projeto Usando Rlocus (Lugar Das Raízes)Document9 pagesApostila Controle - 15b - Projeto Usando Rlocus (Lugar Das Raízes)lnery_1Pas encore d'évaluation
- Apostila Controle - 12 - Modelagem de DistúrbioDocument32 pagesApostila Controle - 12 - Modelagem de Distúrbiolnery_1Pas encore d'évaluation
- Apostila Controle - 14 - Desempenho de Sistemas (Domínio Da Frequência) - BodeDocument36 pagesApostila Controle - 14 - Desempenho de Sistemas (Domínio Da Frequência) - Bodelnery_1Pas encore d'évaluation
- Apostila Controle - 13 - Desempenho de Sistemas (Domínio Do Tempo)Document27 pagesApostila Controle - 13 - Desempenho de Sistemas (Domínio Do Tempo)lnery_1Pas encore d'évaluation
- Apostila Controle - 10 - Motor Corrente ContínuaDocument15 pagesApostila Controle - 10 - Motor Corrente Contínualnery_1Pas encore d'évaluation
- Apostila Controle - 08 - Sensores e AtuadoresDocument32 pagesApostila Controle - 08 - Sensores e Atuadoreslnery_1Pas encore d'évaluation
- Apostila Controle - 11 - Efeito Dos ControladoresDocument37 pagesApostila Controle - 11 - Efeito Dos Controladoreslnery_1Pas encore d'évaluation
- Apostila Controle - 09 - Erro EstacionárioDocument33 pagesApostila Controle - 09 - Erro Estacionáriolnery_1Pas encore d'évaluation
- Apostila Controle - 07 - Integral de Convolução, Função de Transferência e Função Resposta em FrequênciaDocument35 pagesApostila Controle - 07 - Integral de Convolução, Função de Transferência e Função Resposta em Frequêncialnery_1Pas encore d'évaluation
- Apostila Controle - 06 - Solução de Equações DiferenciaisDocument32 pagesApostila Controle - 06 - Solução de Equações Diferenciaislnery_1Pas encore d'évaluation
- Pesquisa Operacional - Aula IntrodutóriaDocument14 pagesPesquisa Operacional - Aula IntrodutóriaEdison RibasPas encore d'évaluation
- 2178 7045 1 PBDocument14 pages2178 7045 1 PBMatheus de SouzaPas encore d'évaluation
- Exercicios CircuitosMagneticosDocument4 pagesExercicios CircuitosMagneticosTiago Michel HoffmannPas encore d'évaluation
- VETORESDocument2 pagesVETORESEmilson MoreiraPas encore d'évaluation
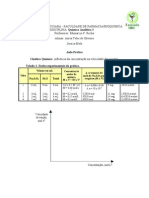
- Prática Cinética IDocument2 pagesPrática Cinética IEnrique FerreiraPas encore d'évaluation
- Lista Exercícios Teorema de PitágorasDocument1 pageLista Exercícios Teorema de PitágorasBeatrizPas encore d'évaluation
- Analise1 Lista 1Document4 pagesAnalise1 Lista 1Amanda PerinPas encore d'évaluation
- 06 - Semelhança de Triângulos - ExerciciosDocument3 pages06 - Semelhança de Triângulos - ExerciciosMilena Monteiro100% (3)
- Dinamica Macro Economic A, Ciclos Endogenos e Fragilidade FinanceiraDocument184 pagesDinamica Macro Economic A, Ciclos Endogenos e Fragilidade Financeiras.renan1302Pas encore d'évaluation
- A Regra de Cramer É Uma Das Maneiras de Resolver Um Sistema LinearDocument16 pagesA Regra de Cramer É Uma Das Maneiras de Resolver Um Sistema Linearanon-507802100% (5)
- Apostila Matematica - GEOMETRIA ANALÍTICA Circunferencia CassioDocument30 pagesApostila Matematica - GEOMETRIA ANALÍTICA Circunferencia CassioIgorPas encore d'évaluation
- Jabardo 2007Document184 pagesJabardo 2007Francisco OppsPas encore d'évaluation
- Apostila Elite LançamentosDocument15 pagesApostila Elite LançamentoslagostinhaPas encore d'évaluation
- Mecânica Técnica e Resistência Dos Materiais 1MN Aulas 06 e 07 - Tensão, Alongamento e DeformaçãoDocument33 pagesMecânica Técnica e Resistência Dos Materiais 1MN Aulas 06 e 07 - Tensão, Alongamento e DeformaçãoVinicius Cunha100% (2)
- Palestra 5 Elementos de Economia e GestaoDocument12 pagesPalestra 5 Elementos de Economia e GestaoApvs WamaritaPas encore d'évaluation
- PRE29006 Lista 3Document6 pagesPRE29006 Lista 3Junior MxPas encore d'évaluation
- Trilha de MatemáticaDocument2 pagesTrilha de Matemáticaerlon dantas da nobrega100% (1)
- En Mat 93 94Document3 pagesEn Mat 93 94FabricioRodrigues0% (1)
- Aula 01 - Pontes e ViadutosDocument151 pagesAula 01 - Pontes e ViadutosBruna Delavy da Silva67% (3)
- Apostila Amostragem Recomendação Adubação ManejoDocument85 pagesApostila Amostragem Recomendação Adubação ManejoMarcelino Geraldo de MagalhãesPas encore d'évaluation
- Lista de ExerciciosDocument2 pagesLista de ExerciciosRicardo MatosPas encore d'évaluation
- Balança de Precisão Com Strain Gages PDFDocument12 pagesBalança de Precisão Com Strain Gages PDFElaine Cristina BritoPas encore d'évaluation
- Geometria n3Document217 pagesGeometria n3gabriel100% (1)
- Instrumentação para o Ensino Da QuímicaDocument61 pagesInstrumentação para o Ensino Da QuímicaEdsonFerreiraPas encore d'évaluation
- Plano de Acao PEIDocument6 pagesPlano de Acao PEILuiz Fabiano BonettiPas encore d'évaluation
- Apostila DraftSight Comandos de Desenho e ModificaçãoDocument17 pagesApostila DraftSight Comandos de Desenho e ModificaçãoAlexandre FernandesPas encore d'évaluation
- Artigo Sobre Norma API 579 - Consulta ImportanteDocument25 pagesArtigo Sobre Norma API 579 - Consulta ImportanteElidene LavaredaPas encore d'évaluation
- Ex4 ModelosDocument3 pagesEx4 ModelosGabriel Henrique BritoPas encore d'évaluation
- 1 P.D - 2022 (Mat. 5º Ano) - Blog Do Prof. WarlesDocument2 pages1 P.D - 2022 (Mat. 5º Ano) - Blog Do Prof. WarlesRaniane Almeida100% (1)
- Exercicios de Volume Nono AnoDocument39 pagesExercicios de Volume Nono AnoMarly AraújoPas encore d'évaluation