Vous aimerez peut-être aussi
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- Resume 2Document2 pagesResume 2api-3726520Pas encore d'évaluation
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- Resume 2Document2 pagesResume 2api-3726520Pas encore d'évaluation
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- Resume 2Document2 pagesResume 2api-3726520Pas encore d'évaluation
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- Resume 2Document2 pagesResume 2api-3726520Pas encore d'évaluation
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- C51 PrimerDocument190 pagesC51 PrimerQuan ThanhPas encore d'évaluation
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (400)
- Philips P89C51RD2 6Document52 pagesPhilips P89C51RD2 6api-3726520Pas encore d'évaluation
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- Writing C Code For The 8051Document52 pagesWriting C Code For The 8051BHUSHANPas encore d'évaluation
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- AT24C512 2tpDocument4 pagesAT24C512 2tpapi-3726520Pas encore d'évaluation
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- IDE51Document116 pagesIDE51api-3726520Pas encore d'évaluation
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (74)
- Gs51 Keil IntroDocument230 pagesGs51 Keil IntroMindfield MiPas encore d'évaluation
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- C51Document393 pagesC51api-3726520100% (1)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- 24C512Document20 pages24C512pravinrautrautPas encore d'évaluation
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- The 8051 Assembly LanguageDocument82 pagesThe 8051 Assembly Languageapi-3726520100% (1)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- C51Document393 pagesC51api-3726520100% (1)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (345)
- Placement GuideDocument457 pagesPlacement Guideapi-3760682Pas encore d'évaluation
- 25 WrapupDocument34 pages25 Wrapupapi-3726520Pas encore d'évaluation
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- 24 RtosDocument38 pages24 Rtosapi-3726520Pas encore d'évaluation
- 20 Ad2d D2aDocument30 pages20 Ad2d D2aapi-3726520Pas encore d'évaluation
- 15 Trad SchedDocument17 pages15 Trad Schedapi-3726520Pas encore d'évaluation
- 19 RealTime SynchronizationDocument27 pages19 RealTime Synchronizationapi-3726520Pas encore d'évaluation
- 13 Con CurrencyDocument40 pages13 Con Currencyapi-3726520Pas encore d'évaluation
- Being Pwer and Powerless - Hmnties & SCL Scncs ReviewsDocument106 pagesBeing Pwer and Powerless - Hmnties & SCL Scncs Reviewslukas222Pas encore d'évaluation
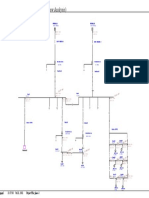
- One-Line Diagram - OLV1 (Load Flow Analysis) : 33.0 7 KV 33.0 7 KV 33.0 7 KV 33.0 7 KVDocument1 pageOne-Line Diagram - OLV1 (Load Flow Analysis) : 33.0 7 KV 33.0 7 KV 33.0 7 KV 33.0 7 KVhaiderPas encore d'évaluation
- Shortcut Description: Tally ShortcutsDocument3 pagesShortcut Description: Tally ShortcutsSantosh KuperkarPas encore d'évaluation
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- Letter of MotivationDocument1 pageLetter of Motivationhafiz muhammad zubair hafiz muhammad zubairPas encore d'évaluation
- Sm-Sinamics S120Document55 pagesSm-Sinamics S120preferredcustomerPas encore d'évaluation
- Chapter FiveDocument88 pagesChapter FiveErmias MesfinPas encore d'évaluation
- Year 6 Week 1 Lesson 1 Main Focus Prior Knowledge Key Vocabulary Curriculum ObjectivesDocument19 pagesYear 6 Week 1 Lesson 1 Main Focus Prior Knowledge Key Vocabulary Curriculum Objectiveslenson kinyuaPas encore d'évaluation
- Chapter10 Econometrics DummyVariableModelDocument8 pagesChapter10 Econometrics DummyVariableModelAbdullah KhatibPas encore d'évaluation
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (121)
- Ame Relay LabDocument6 pagesAme Relay LabasegunloluPas encore d'évaluation
- SAP B1 General Settings For Ivend RetailDocument12 pagesSAP B1 General Settings For Ivend RetailVarun SirohiPas encore d'évaluation
- Acceptable Use AgreementDocument2 pagesAcceptable Use Agreementapi-325973069Pas encore d'évaluation
- L .. Eee - .: Distribution Voltage RegulatorsDocument11 pagesL .. Eee - .: Distribution Voltage RegulatorsSirajulPas encore d'évaluation
- Macro Teste de ResistenciaDocument1 pageMacro Teste de ResistenciaFelipe MouraPas encore d'évaluation
- Week4 SoundDocument34 pagesWeek4 SoundCNTT - 7C-18 Nguyễn Minh ThảoPas encore d'évaluation
- 2.2 BA ZC426 RTA Apache ZooKeeperDocument24 pages2.2 BA ZC426 RTA Apache ZooKeeperPrasanth TarikoppadPas encore d'évaluation
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- Flare June July 2009Document102 pagesFlare June July 2009khan_b66Pas encore d'évaluation
- Java Code Examples Org - Springframework.batch - Core.launch - Joblauncher.runDocument12 pagesJava Code Examples Org - Springframework.batch - Core.launch - Joblauncher.runBala KulandaiPas encore d'évaluation
- Verification Automation Using IPXACT - Jindal and SinglaDocument31 pagesVerification Automation Using IPXACT - Jindal and SinglaLuis B. Da SilvaPas encore d'évaluation
- ICT X Practice QuestionsDocument3 pagesICT X Practice QuestionsYash KohalePas encore d'évaluation
- Internship Mechatronics EnglishDocument1 pageInternship Mechatronics EnglishHassan KhalilPas encore d'évaluation
- Parkinson Disease DetectionDocument5 pagesParkinson Disease DetectionMaximiliano ThiagoPas encore d'évaluation
- DES NumericalDocument14 pagesDES NumericalAshish SharmaPas encore d'évaluation
- Observed Impact of Internet Café Near The School Vicinity To The Students Academics Performances On VnhsDocument19 pagesObserved Impact of Internet Café Near The School Vicinity To The Students Academics Performances On VnhsMichelle Renee DaquePas encore d'évaluation
- CSE101 Computer Programming: Lecture #0Document28 pagesCSE101 Computer Programming: Lecture #0t iwariPas encore d'évaluation
- Biological Science 6th Edition Freeman Test BankDocument21 pagesBiological Science 6th Edition Freeman Test Bankagleamamusable.pwclcq100% (28)
- Sony SLV Ex5 Ex8s Ex9sDocument71 pagesSony SLV Ex5 Ex8s Ex9svideoson100% (1)
- MINI Cooper Service Manual 2002 2006 Table of ContentsDocument176 pagesMINI Cooper Service Manual 2002 2006 Table of ContentsJoel Victoria100% (1)
- Silumin Catalogo Lutec PVP 2021Document186 pagesSilumin Catalogo Lutec PVP 2021VEMATELPas encore d'évaluation
- Features: 2.4 GHZ Wireless Lan Power Amplifier ModuleDocument12 pagesFeatures: 2.4 GHZ Wireless Lan Power Amplifier ModulesergeyPas encore d'évaluation
- Sprint - Fraud Management: OCA Dispute KSOPHE0202-2C516 6360 Sprint Parkway Overland Park, KS 66251Document2 pagesSprint - Fraud Management: OCA Dispute KSOPHE0202-2C516 6360 Sprint Parkway Overland Park, KS 66251DjPas encore d'évaluation