Vous aimerez peut-être aussi
- uCOS II Reference ManualDocument89 pagesuCOS II Reference ManualKien Nguyen TrungPas encore d'évaluation
- Overview of UcosiiDocument78 pagesOverview of UcosiigafoorkadostPas encore d'évaluation
- UC Mutual Exclusion SemaphoreDocument27 pagesUC Mutual Exclusion SemaphoreAbhishek SinghPas encore d'évaluation
- Queue FunctionsDocument4 pagesQueue FunctionspiyushpandeyPas encore d'évaluation
- C/OS-II: V2.51 Quick Reference ChartDocument1 pageC/OS-II: V2.51 Quick Reference ChartAljaž SrebrničPas encore d'évaluation
- How To Get A C/OS-II Application Running: Default ConfigurationDocument7 pagesHow To Get A C/OS-II Application Running: Default ConfigurationdinismiguelPas encore d'évaluation
- Inter-Task Communication Using Message Queue: Ex - No.8 DateDocument10 pagesInter-Task Communication Using Message Queue: Ex - No.8 DateDheereshPas encore d'évaluation
- Implemention of Mailbox Function Using LPC2378Document5 pagesImplemention of Mailbox Function Using LPC2378imbharteshPas encore d'évaluation
- Lab 5Document11 pagesLab 5Navid MohagheghPas encore d'évaluation
- Μc/Os Ii The Real-Time KernelDocument21 pagesΜc/Os Ii The Real-Time KernelVigneshwaran SdPas encore d'évaluation
- Implemention of Mutex Function Using Lpc2378Document6 pagesImplemention of Mutex Function Using Lpc2378imbharteshPas encore d'évaluation
- Microc/Os-Ii Kernel Structure-IiiDocument38 pagesMicroc/Os-Ii Kernel Structure-IiiNaman KhatriPas encore d'évaluation
- Chapter 03Document78 pagesChapter 03Lê Đình TiếnPas encore d'évaluation
- Implemention of Message Queue Using LPC2148Document5 pagesImplemention of Message Queue Using LPC2148imbharteshPas encore d'évaluation
- uC/OS-II Event FlagsDocument32 pagesuC/OS-II Event FlagsEthan LauPas encore d'évaluation
- Ucos Ii: BY: MeetDocument26 pagesUcos Ii: BY: MeetmeetbshahPas encore d'évaluation
- 8th ExpDocument12 pages8th ExpusaravanakumarPas encore d'évaluation
- EmbeddedSys Nri Unit-VIIDocument36 pagesEmbeddedSys Nri Unit-VIIMurali KrishnaPas encore d'évaluation
- Microc/Os-Ii Quick Reference: Index of ServicesDocument29 pagesMicroc/Os-Ii Quick Reference: Index of ServicesEmran PrevostPas encore d'évaluation
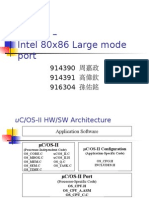
- Micro c/Os II 作業系統Document31 pagesMicro c/Os II 作業系統陳鍾誠Pas encore d'évaluation
- CVE 2017 11176 A Step by Step Linux Kernel Exploitation Part 2Document32 pagesCVE 2017 11176 A Step by Step Linux Kernel Exploitation Part 2Lincoln DiasPas encore d'évaluation
- C/OS-II Reference Manual: #DefineDocument128 pagesC/OS-II Reference Manual: #DefineVramesh4545Pas encore d'évaluation
- Chapter2.4-Syn Pro - Question - 20Document6 pagesChapter2.4-Syn Pro - Question - 20vinhphatst1235Pas encore d'évaluation
- Lab FreeRTOSDocument11 pagesLab FreeRTOSImmortal WizardPas encore d'évaluation
- Ucos II RefmanDocument159 pagesUcos II RefmanAhmed AbdelhakemPas encore d'évaluation
- Implemention of Mailbox Function Using LPC2148Document5 pagesImplemention of Mailbox Function Using LPC2148imbharteshPas encore d'évaluation
- Your Electronics Open Source: FIFO QueueDocument6 pagesYour Electronics Open Source: FIFO QueueIonela100% (2)
- C303.Chương4 TH9Document3 pagesC303.Chương4 TH9Trần Ngọc PhongPas encore d'évaluation
- The Myth of QiLinDocument22 pagesThe Myth of QiLinFakermanPas encore d'évaluation
- Implemention of Message Queue Using LPC2378Document9 pagesImplemention of Message Queue Using LPC2378imbharteshPas encore d'évaluation
- Implementing and Maintaining Your User Entry Point Table UeptDocument8 pagesImplementing and Maintaining Your User Entry Point Table Ueptrachmat99Pas encore d'évaluation
- Mod UcosDocument76 pagesMod Ucosapi-27122486100% (2)
- Porting - Intel 80x86 Large Mode PortDocument30 pagesPorting - Intel 80x86 Large Mode PortSuhas ShirolPas encore d'évaluation
- Chap 20Document32 pagesChap 20Udasi DeviPas encore d'évaluation
- Recon 2012 Skochinsky Compiler InternalsDocument54 pagesRecon 2012 Skochinsky Compiler InternalsimoptraPas encore d'évaluation
- Eu 16 Shen Rooting Every Android From Extension To ExploitationDocument43 pagesEu 16 Shen Rooting Every Android From Extension To Exploitationyelawib563Pas encore d'évaluation
- Team17 HiddenCommandsDocument9 pagesTeam17 HiddenCommandsasdfqewvgresvgPas encore d'évaluation
- JB iOSDocument27 pagesJB iOSKellerman RiveroPas encore d'évaluation
- Chapter 13Document56 pagesChapter 13Lê Đình TiếnPas encore d'évaluation
- Real-Time Kernel DocumentationDocument7 pagesReal-Time Kernel Documentationharoon_niazPas encore d'évaluation
- Esd AssignmentDocument11 pagesEsd AssignmentSNOWFLAKE STUDIOPas encore d'évaluation
- Threads With Ucontext - Implementation ChatgptDocument8 pagesThreads With Ucontext - Implementation ChatgptAlfred YimPas encore d'évaluation
- ZenerDocument13 pagesZenerapi-531846547Pas encore d'évaluation
- Qcom Omx Plugin: Function Internal Function Calls DescriptionDocument2 pagesQcom Omx Plugin: Function Internal Function Calls DescriptionSai AkulaPas encore d'évaluation
- Main CDocument10 pagesMain CTarcísio Souza de MeloPas encore d'évaluation
- Introduction To Freertos: What Is An Rtos?Document15 pagesIntroduction To Freertos: What Is An Rtos?عبدالله بحراويPas encore d'évaluation
- SpihsmDocument26 pagesSpihsmapi-438120791Pas encore d'évaluation
- ACPI Implants Ruxmon PresentationDocument49 pagesACPI Implants Ruxmon PresentationVIC RODPas encore d'évaluation
- Introduction To FreeRTOSDocument75 pagesIntroduction To FreeRTOSឆាម វ៉ាន់នូវPas encore d'évaluation
- Jes2 Checkpoint & The Coupling Facility: Function Type Structure Name SIZEDocument5 pagesJes2 Checkpoint & The Coupling Facility: Function Type Structure Name SIZEÖzgür HepsağPas encore d'évaluation
- The Art of Bootkit DevelopmentDocument26 pagesThe Art of Bootkit DevelopmentKleissnerPas encore d'évaluation
- CodeDocument3 pagesCodeSteve DicksonPas encore d'évaluation
- Phrack Issue 68 #1Document46 pagesPhrack Issue 68 #1Rishab ChoubeyPas encore d'évaluation
- VxWorks - Get StartedDocument13 pagesVxWorks - Get StartedRps Deepan100% (1)
- Practical Reverse Engineering: x86, x64, ARM, Windows Kernel, Reversing Tools, and ObfuscationD'EverandPractical Reverse Engineering: x86, x64, ARM, Windows Kernel, Reversing Tools, and ObfuscationPas encore d'évaluation
- Interview Questions for IBM Mainframe DevelopersD'EverandInterview Questions for IBM Mainframe DevelopersÉvaluation : 1 sur 5 étoiles1/5 (1)
- PlayStation 2 Architecture: Architecture of Consoles: A Practical Analysis, #12D'EverandPlayStation 2 Architecture: Architecture of Consoles: A Practical Analysis, #12Pas encore d'évaluation
- Dreamcast Architecture: Architecture of Consoles: A Practical Analysis, #9D'EverandDreamcast Architecture: Architecture of Consoles: A Practical Analysis, #9Pas encore d'évaluation
- NVIDIA System Information 01-08-2011 21-54-14Document1 pageNVIDIA System Information 01-08-2011 21-54-14Saksham BansalPas encore d'évaluation
- Archmodels Vol 156Document12 pagesArchmodels Vol 156aparnaPas encore d'évaluation
- Agenda: - What's A Microcontroller?Document38 pagesAgenda: - What's A Microcontroller?Hoang Dung SonPas encore d'évaluation
- Girbau, S.A.: STI-54 / STI-77 Parts ManualDocument72 pagesGirbau, S.A.: STI-54 / STI-77 Parts ManualoozbejPas encore d'évaluation
- ECSP DotNet Brochure PDFDocument6 pagesECSP DotNet Brochure PDFXavi FerPas encore d'évaluation
- Guidely Age Set 1 PDFDocument5 pagesGuidely Age Set 1 PDFPriya KumariPas encore d'évaluation
- Fundamentals of Data Structures and AlgorithmsDocument2 pagesFundamentals of Data Structures and Algorithmstestdump64Pas encore d'évaluation
- Controller, Asst - Controller, SR - Accountant, Accounting ManagerDocument3 pagesController, Asst - Controller, SR - Accountant, Accounting Managerapi-72678201Pas encore d'évaluation
- MFA For Partner Portal InstructionsDocument5 pagesMFA For Partner Portal InstructionsGaby SilveiraPas encore d'évaluation
- HRM ProjectDocument26 pagesHRM ProjectJayShah100% (1)
- Ali Gohar & CompanyDocument4 pagesAli Gohar & CompanyAbdul RafayPas encore d'évaluation
- Practical-8: Write A Mobile Application That Creates Alarm ClockDocument7 pagesPractical-8: Write A Mobile Application That Creates Alarm Clockjhyter54rdPas encore d'évaluation
- Econstruct Issue 2Document40 pagesEconstruct Issue 2ArNushiMahfodzPas encore d'évaluation
- Feature Evaluation For Web Crawler Detection With Data Mining TechniquesDocument11 pagesFeature Evaluation For Web Crawler Detection With Data Mining TechniquesSlava ShkolyarPas encore d'évaluation
- DSC-33C DSTC-40GDocument1 pageDSC-33C DSTC-40GsathishPas encore d'évaluation
- Presentation SLTDocument14 pagesPresentation SLTAliPas encore d'évaluation
- Service Manual: Digital WorkstationDocument84 pagesService Manual: Digital WorkstationbeytullahPas encore d'évaluation
- Java ProgrammingDocument134 pagesJava ProgrammingArt LookPas encore d'évaluation
- Different Approaches To Crack Monitoring of Buildings Using IOTDocument11 pagesDifferent Approaches To Crack Monitoring of Buildings Using IOTIJRASETPublicationsPas encore d'évaluation
- RS232STATUSMONDocument1 pageRS232STATUSMONashish.boradPas encore d'évaluation
- Design App Themes With Theme EditorDocument4 pagesDesign App Themes With Theme Editorsenze_shin3Pas encore d'évaluation
- Adept PovertyDocument21 pagesAdept PovertyKitchie HermosoPas encore d'évaluation
- Case Study Problem StatementDocument2 pagesCase Study Problem StatementSahil GargPas encore d'évaluation
- St. Therese School Second Periodic Test Mapeh 2Document4 pagesSt. Therese School Second Periodic Test Mapeh 2dona manuela elementary schoolPas encore d'évaluation
- Hipaa Information and Consent FormDocument1 pageHipaa Information and Consent FormJake HennemanPas encore d'évaluation
- EF4e Int EndtestB AnswersheetDocument2 pagesEF4e Int EndtestB AnswersheetB Mc0% (1)
- Strategic Renewal of OrganizationsDocument13 pagesStrategic Renewal of Organizationsv_rohatgiPas encore d'évaluation
- Mobile Assisted Language Learning (MALL) Describes An Approach To Language LearningDocument7 pagesMobile Assisted Language Learning (MALL) Describes An Approach To Language Learninggusria ningsihPas encore d'évaluation
- Installation Instructions Avramis River MT4Document7 pagesInstallation Instructions Avramis River MT4Muhammad HamzaPas encore d'évaluation
- Anti Lock Brake SystemDocument41 pagesAnti Lock Brake SystemToua YajPas encore d'évaluation