Vous aimerez peut-être aussi
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (399)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (73)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (120)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- Weather Forecasting App PythonDocument12 pagesWeather Forecasting App PythonK DPas encore d'évaluation
- A1: Assignment 1 Mobile System Development InstructionDocument4 pagesA1: Assignment 1 Mobile System Development InstructionYOGANaNDHAMPas encore d'évaluation
- KNX U.motion Technical Information (Web)Document25 pagesKNX U.motion Technical Information (Web)anak1n888100% (1)
- BX10/BX10 MB: Weighing Terminals Technical ManualDocument60 pagesBX10/BX10 MB: Weighing Terminals Technical Manualfelipezambrano50% (2)
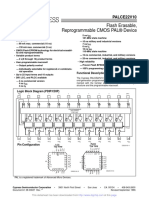
- Flash Erasable, Reprogrammable CMOS PAL® Device: PALCE22V10Document13 pagesFlash Erasable, Reprogrammable CMOS PAL® Device: PALCE22V10Imran Ali ShahPas encore d'évaluation
- Cod Fain LED Server WS2812FXDocument10 pagesCod Fain LED Server WS2812FXIulian LunguPas encore d'évaluation
- AEQ AoIP Users ManualDocument150 pagesAEQ AoIP Users ManualHabtamu TadessePas encore d'évaluation
- VN820 / VN820SO VN820SP / VN820-B5 / VN820PT: High Side DriverDocument35 pagesVN820 / VN820SO VN820SP / VN820-B5 / VN820PT: High Side DriverErasmo FrancoPas encore d'évaluation
- L14 DriveProgrammingwiththeNewPowerFlex PDFDocument84 pagesL14 DriveProgrammingwiththeNewPowerFlex PDFstinkystuffPas encore d'évaluation
- Facilio State of Operations and Maintenance SoftwareDocument25 pagesFacilio State of Operations and Maintenance Softwarearunkumar277041Pas encore d'évaluation
- Example-1: Power AmplifierDocument2 pagesExample-1: Power AmplifierKahina ZitouniPas encore d'évaluation
- 8253,8279,8259Document47 pages8253,8279,8259Anonymous c75J3yX33100% (1)
- 10 EMI 04 The PIC Micro ControllerDocument20 pages10 EMI 04 The PIC Micro Controllerapi-3707706100% (1)
- HVPFC2PHILDocument33 pagesHVPFC2PHILQuyền TrịnhPas encore d'évaluation
- EPAM Curriculum For Batch 2023Document9 pagesEPAM Curriculum For Batch 2023sravan kumarPas encore d'évaluation
- Fast Lane - LF-LFS452Document3 pagesFast Lane - LF-LFS452adioshunPas encore d'évaluation
- Et200sp Ha F Di 16x24vdc Manual en-US en-USDocument82 pagesEt200sp Ha F Di 16x24vdc Manual en-US en-USLam Tran ducPas encore d'évaluation
- Si5332 RMDocument69 pagesSi5332 RMEsmo ImmoPas encore d'évaluation
- Wms PatchesDocument8 pagesWms PatchesAhmed AdelPas encore d'évaluation
- WSGI DeploymentDocument14 pagesWSGI DeploymentJosé Arturo GarcíaPas encore d'évaluation
- Otheros PrepDocument43 pagesOtheros PrepAmrit TripathiPas encore d'évaluation
- GstDef2.0 Defining ToolDocument26 pagesGstDef2.0 Defining ToolvaisakhpillaiPas encore d'évaluation
- DS 0806 ProximVision USHRDocument4 pagesDS 0806 ProximVision USHRamilperPas encore d'évaluation
- PSP Manual 4 1Document6 pagesPSP Manual 4 1saboohsalimPas encore d'évaluation
- Eaton 9170+ Flash Instructions: UPS Model: 9170+ UPSDocument14 pagesEaton 9170+ Flash Instructions: UPS Model: 9170+ UPSjorlugonPas encore d'évaluation
- eSAM - Performance Assessment: Joan D'austria, 112 - Barcelona - SP - 08018 Chalfont ST Peter - Bucks - UK - SL9 9TRDocument13 pageseSAM - Performance Assessment: Joan D'austria, 112 - Barcelona - SP - 08018 Chalfont ST Peter - Bucks - UK - SL9 9TRThe Quan BuiPas encore d'évaluation
- ARDUINO PROGRAMMING WITH MIT APP INVENTOR - Learn With Tutorial GuideDocument72 pagesARDUINO PROGRAMMING WITH MIT APP INVENTOR - Learn With Tutorial GuideJorge Jockyman JuniorPas encore d'évaluation
- T6963CDocument28 pagesT6963Capi-19831863Pas encore d'évaluation
- 2D Array ManipulationDocument10 pages2D Array ManipulationebgambaPas encore d'évaluation
- Manual enDocument88 pagesManual enyenorig120Pas encore d'évaluation