Vous aimerez peut-être aussi
- Teoría de ColaDocument8 pagesTeoría de ColaDonald LópezPas encore d'évaluation
- Informe N°2Document23 pagesInforme N°2Artur Hansel Osorio TarazonaPas encore d'évaluation
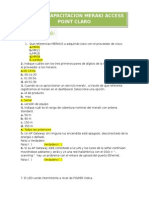
- Preguntas MerakiDocument3 pagesPreguntas MerakiMargarita Benitez ForeroPas encore d'évaluation
- Preparatorio 1Document11 pagesPreparatorio 1Luis LoayzaPas encore d'évaluation
- Tarea TeóricaDocument12 pagesTarea TeóricaDaniel Quesada BejaranoPas encore d'évaluation
- Partida Inversor de Marcha Sin Pasar Por ParoDocument15 pagesPartida Inversor de Marcha Sin Pasar Por ParoJulio Jt El FatalitooxxPas encore d'évaluation
- BJTDocument21 pagesBJTJose PalomoPas encore d'évaluation
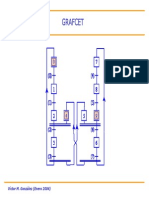
- Diapositivas GrafcetDocument27 pagesDiapositivas GrafcetChama KbrePas encore d'évaluation
- Ensayo ElectronicaDocument5 pagesEnsayo ElectronicaLiv KasillasPas encore d'évaluation
- Control de Instrumentacion PDFDocument8 pagesControl de Instrumentacion PDFLania100% (1)
- Marco TeóricoDocument6 pagesMarco TeóricoEdgar Almachi0% (1)
- Aplicaciones de Los Diodos ZenerDocument6 pagesAplicaciones de Los Diodos ZenerMelitón Ariel Elgueta100% (1)
- Diodos-Clase 2Document27 pagesDiodos-Clase 2AntonioCruzPas encore d'évaluation
- Teoria de Colas PresentacionDocument37 pagesTeoria de Colas PresentacionDanilo Rodriguez VergaraPas encore d'évaluation
- Telefonia IPDocument6 pagesTelefonia IPMOrtiz100% (2)
- Introduccion Al Control Robusto Español PDFDocument34 pagesIntroduccion Al Control Robusto Español PDFFrancisco GomezPas encore d'évaluation
- Teoria de Colas Primera PresentacionDocument21 pagesTeoria de Colas Primera PresentacionmagdalenaPas encore d'évaluation
- Aguilar Rodriguez Junior Anderson Examen Parcial Telematica 2021-bDocument2 pagesAguilar Rodriguez Junior Anderson Examen Parcial Telematica 2021-bJunior Aguilar RodriguezPas encore d'évaluation
- Disparo Del Tiristor Con Circuitos Integrados Ujt y PutDocument21 pagesDisparo Del Tiristor Con Circuitos Integrados Ujt y PutAndrue Bremenn Tito TorrejónPas encore d'évaluation
- Parcial Tecno PDFDocument5 pagesParcial Tecno PDFOlesya SergeevaPas encore d'évaluation
- Paso 5 - Diseñar Un Controlador DigitalDocument13 pagesPaso 5 - Diseñar Un Controlador DigitalHarold Garcia VargasPas encore d'évaluation
- Sistema de Control DiscretoDocument21 pagesSistema de Control DiscretorolandotomantoPas encore d'évaluation
- Capitulo 7. Inversores PDFDocument61 pagesCapitulo 7. Inversores PDFBrandon Payano De La CruzPas encore d'évaluation
- Control de Proceso Ejercicios FinalDocument9 pagesControl de Proceso Ejercicios FinalUlises Jose GonzalezPas encore d'évaluation
- Info. Filtro Pasa Bajas PDFDocument2 pagesInfo. Filtro Pasa Bajas PDFLinda CastilloPas encore d'évaluation
- TIRISTORESDocument11 pagesTIRISTORESJavier SuarezPas encore d'évaluation
- Modelado de Sistemas de Nivel de LíquidoDocument6 pagesModelado de Sistemas de Nivel de LíquidoJesus RomeroPas encore d'évaluation
- CeduvirtSimulink PDFDocument33 pagesCeduvirtSimulink PDFArturo RawrPas encore d'évaluation
- Lab03 Rectificador Controlado Media Onda v2Document10 pagesLab03 Rectificador Controlado Media Onda v2GustavoDelCarpioYanaPas encore d'évaluation
- Practica 1 Sistemas de ControlDocument4 pagesPractica 1 Sistemas de ControlErick SilvaPas encore d'évaluation
- Lab 03 Conversion de Sistemas Continuos A DiscretosDocument8 pagesLab 03 Conversion de Sistemas Continuos A DiscretosJavier EsquivelPas encore d'évaluation
- Informe 1 - Control Avanzado 2018Document6 pagesInforme 1 - Control Avanzado 2018Pedro CachañaPas encore d'évaluation
- Consulta de Señales y FohDocument6 pagesConsulta de Señales y FohandrsPas encore d'évaluation
- Lab 2 Auto Prof JesusDocument5 pagesLab 2 Auto Prof JesusJuan Diego100% (1)
- 4Document14 pages4Rosvit De la CruzPas encore d'évaluation
- Consideraciones Generales de La FrecuenciaDocument2 pagesConsideraciones Generales de La Frecuenciafabriziod16Pas encore d'évaluation
- Practica 2Document5 pagesPractica 2jaimeasisaPas encore d'évaluation
- Laboratorio 1 PLCDocument12 pagesLaboratorio 1 PLCDARIELPas encore d'évaluation
- 6 - Controlabilidad PDFDocument23 pages6 - Controlabilidad PDFBrayanPas encore d'évaluation
- Distintos Tipos de Convertidores Análogos y DigitalesDocument4 pagesDistintos Tipos de Convertidores Análogos y DigitalesAlber Lim GboPas encore d'évaluation
- Practica 7 Sist Med Temperatura Comp II pt100Document2 pagesPractica 7 Sist Med Temperatura Comp II pt100Kevin Celis100% (1)
- Practica II Controlador PID Analogico PDFDocument40 pagesPractica II Controlador PID Analogico PDFArtemio SanchezPas encore d'évaluation
- Unidad 3 Seminario Desarrollo ProfesionalDocument16 pagesUnidad 3 Seminario Desarrollo ProfesionalpavelPas encore d'évaluation
- 5 Clase 2Document20 pages5 Clase 2Michael Obispo GaliciaPas encore d'évaluation
- Ejercicios Transistores NMOS y PMOS 1Document2 pagesEjercicios Transistores NMOS y PMOS 1Sara MendezPas encore d'évaluation
- Informe Tanque FactoryDocument11 pagesInforme Tanque FactoryWelYto WM AndaluzPas encore d'évaluation
- Ensayo Sobre Logica SecuenciaDocument21 pagesEnsayo Sobre Logica SecuenciaLuis Enrique Huh PucPas encore d'évaluation
- Fuentes de InterrupcionDocument4 pagesFuentes de InterrupcionJoel SalahPas encore d'évaluation
- Timer 0Document9 pagesTimer 0MiassssPas encore d'évaluation
- Analisis Entrada Salida de Sistemas en El TiempoDocument6 pagesAnalisis Entrada Salida de Sistemas en El TiempoSebastián Muñoz AndradePas encore d'évaluation
- Modelar y Simular Punto 2Document39 pagesModelar y Simular Punto 2PedroJosePas encore d'évaluation
- Diagrama CompuertasDocument4 pagesDiagrama CompuertasJorge MendozaPas encore d'évaluation
- Tarea 4 Control DigitalDocument6 pagesTarea 4 Control DigitalAldo CarrilloPas encore d'évaluation
- Universidad Nacional Del Callao Examen Parcial Telematica 2021-ADocument1 pageUniversidad Nacional Del Callao Examen Parcial Telematica 2021-AJunior Aguilar RodriguezPas encore d'évaluation
- Estabilidad de Sistemas PDFDocument24 pagesEstabilidad de Sistemas PDFAldo Herrera CasasPas encore d'évaluation
- Ad ModDocument5 pagesAd ModayalavPas encore d'évaluation
- Sistemas de Control IIDocument20 pagesSistemas de Control IIIvonne Vuitton GaultierPas encore d'évaluation
- Tema 8Document29 pagesTema 8sexolav979Pas encore d'évaluation
- Criterios de Estabilidad para SistemasDocument89 pagesCriterios de Estabilidad para SistemasCarlos Fernando Escalante ArciniegasPas encore d'évaluation
- Parcial 2 3226 I-2020 A PDFDocument1 pageParcial 2 3226 I-2020 A PDFfernandoPas encore d'évaluation
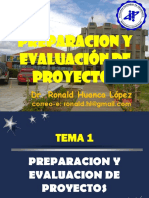
- Tema 1 (Preparacion y Evaluacion de Proyectos)Document57 pagesTema 1 (Preparacion y Evaluacion de Proyectos)danielPas encore d'évaluation
- Practica Resuelta MEC3263Document17 pagesPractica Resuelta MEC3263Jose Luis Arimosa Garcia100% (1)
- AutomatizacionDocument4 pagesAutomatizacionfernandoPas encore d'évaluation
- Proyecto Mec 3333Document60 pagesProyecto Mec 3333Meneces R. CrisPas encore d'évaluation
- Diseño de Maquinas NortonDocument15 pagesDiseño de Maquinas NortonfernandoPas encore d'évaluation
- Laboratorio 1Document11 pagesLaboratorio 1fernandoPas encore d'évaluation
- SoldaduraDocument15 pagesSoldadurafernandoPas encore d'évaluation
- Sistema NerviosoDocument5 pagesSistema NerviosofernandoPas encore d'évaluation
- Calculos Proyecto 2-2019Document38 pagesCalculos Proyecto 2-2019fernandoPas encore d'évaluation
- SoldaduraDocument3 pagesSoldadurafernandoPas encore d'évaluation
- Ejercicios EstructurasDocument15 pagesEjercicios EstructurasfernandoPas encore d'évaluation
- Practica 1 CalidadDocument1 pagePractica 1 CalidadfernandoPas encore d'évaluation
- Como La Velocidad Es Proporcional Al RadioDocument1 pageComo La Velocidad Es Proporcional Al RadiofernandoPas encore d'évaluation
- Sistema CirculatorioDocument2 pagesSistema CirculatoriofernandoPas encore d'évaluation
- Sistema Respiratorio en Organismo SimplesDocument4 pagesSistema Respiratorio en Organismo SimplesfernandoPas encore d'évaluation
- Tema de Proyecto FinalDocument21 pagesTema de Proyecto FinalfernandoPas encore d'évaluation
- Sistemas de Transmision CombinadasDocument64 pagesSistemas de Transmision CombinadasfernandoPas encore d'évaluation
- OídoDocument7 pagesOídofernandoPas encore d'évaluation
- Tornillo Sin FinDocument4 pagesTornillo Sin Finanon_910784708Pas encore d'évaluation
- Diseño de ColectorDocument9 pagesDiseño de ColectorLuis Gustavo Nolasco LeónPas encore d'évaluation
- Mapa Gasoductos PDFDocument1 pageMapa Gasoductos PDFfernandoPas encore d'évaluation
- Proy elemIIDocument13 pagesProy elemIIfernandoPas encore d'évaluation
- Examen RedesDocument9 pagesExamen RedesfernandoPas encore d'évaluation
- Calidad ExamenesDocument7 pagesCalidad ExamenesfernandoPas encore d'évaluation
- Manual de Ventilacion Loren CookDocument52 pagesManual de Ventilacion Loren CookDaniel CarreteroPas encore d'évaluation
- VentilacionDocument11 pagesVentilacionfernandoPas encore d'évaluation
- Redes de Aire ComprimidoDocument10 pagesRedes de Aire ComprimidoFabrii Magnus LodbrókPas encore d'évaluation
- Resistencia Ii ProyectoDocument32 pagesResistencia Ii ProyectofernandoPas encore d'évaluation
- Planeacion Matematicas 2-13 Marzo, Los Moños Leccion 50.Document9 pagesPlaneacion Matematicas 2-13 Marzo, Los Moños Leccion 50.Alma Karely Félix CarrilloPas encore d'évaluation
- CALCULO INTEGRAL Unidad IIDocument32 pagesCALCULO INTEGRAL Unidad IIHiram YairPas encore d'évaluation
- Capítulo 3Document18 pagesCapítulo 3Henry Chavez RojasPas encore d'évaluation
- Modelos Matriciales LeslieDocument20 pagesModelos Matriciales LeslieClaudia Sedano IbañezPas encore d'évaluation
- Hallar "M + N", Si Al Dividir: El Resto Resulta (2x + 3)Document7 pagesHallar "M + N", Si Al Dividir: El Resto Resulta (2x + 3)David100% (1)
- Taller de Refuerzo Grado NovenoDocument2 pagesTaller de Refuerzo Grado Novenoangeldemadrid100% (3)
- Ejercicio Metodo Dual Simplex Minimizacion Parte 1Document2 pagesEjercicio Metodo Dual Simplex Minimizacion Parte 1jon hartPas encore d'évaluation
- Tercera Prueba MatematicaDocument6 pagesTercera Prueba MatematicaRICARDO JOSE FERNANDES BOSSIOPas encore d'évaluation
- Álgebra WM 2020 Promo PDFDocument22 pagesÁlgebra WM 2020 Promo PDFLuis Alberto Gómez López0% (1)
- Guia 18 - B - MatematicaDocument12 pagesGuia 18 - B - MatematicaLuis Armando PandoPas encore d'évaluation
- RepasoDocument8 pagesRepasoClaudia QuinoPas encore d'évaluation
- Examen FactorizacionDocument2 pagesExamen FactorizacionDIANA GOMEZPas encore d'évaluation
- Mecanismo de 10 Barras Ejercicio AlumnosDocument11 pagesMecanismo de 10 Barras Ejercicio AlumnosMaestro LimpioPas encore d'évaluation
- Algebras de Semigrupos y Aplicaciones 0Document132 pagesAlgebras de Semigrupos y Aplicaciones 0yadhiraPas encore d'évaluation
- Correlacion y RegresionDocument12 pagesCorrelacion y RegresionCesar Vilchez Ramirez100% (1)
- Temas Del Examen Parcial de Álgebra Superior Matemática 230.Document3 pagesTemas Del Examen Parcial de Álgebra Superior Matemática 230.Jose AlcantaraPas encore d'évaluation
- Planificacion Clase A ClaseDocument8 pagesPlanificacion Clase A ClasePauli Segura DaberPas encore d'évaluation
- Algebra Lineal ReactivosDocument6 pagesAlgebra Lineal ReactivosAlexander Rogel0% (1)
- Unidad 3 Tarea 3 Algebra - July - CadavidDocument5 pagesUnidad 3 Tarea 3 Algebra - July - Cadavidmauricio londoño velezPas encore d'évaluation
- Lista 8Document2 pagesLista 8CARLOS ANGELES GRANDEZPas encore d'évaluation
- Collage de Ejercicios RadicalesDocument10 pagesCollage de Ejercicios Radicalesapi-27019128Pas encore d'évaluation
- Función Raíz Cuadrada y CubicaDocument11 pagesFunción Raíz Cuadrada y CubicaandresPas encore d'évaluation
- Mapa Curricular As 9Document16 pagesMapa Curricular As 9Luisa SerpaPas encore d'évaluation
- TRIGO+4°+Document24 pagesTRIGO+4°+Jessica Sanchez QuispePas encore d'évaluation
- 2 Potencias y Raices PDFDocument30 pages2 Potencias y Raices PDFospalduPas encore d'évaluation
- Clase#15 Factorización División SintéticaDocument6 pagesClase#15 Factorización División SintéticaRandall Jeshua Calero CastilloPas encore d'évaluation
- Logistica-Proyecto 7 Grafos ViasDocument5 pagesLogistica-Proyecto 7 Grafos ViasValeria Nicole Gutierrez PadillaPas encore d'évaluation
- Desarrollo Histórico-Epistemológico Del Álgebra: Evolución Hacia Distintos SignificadosDocument14 pagesDesarrollo Histórico-Epistemológico Del Álgebra: Evolución Hacia Distintos SignificadosJulie DomthPas encore d'évaluation