Académique Documents
Professionnel Documents
Culture Documents
Commande en Vitesse de La Machine Asynchrone PDF
Transféré par
moi100%(1)100% ont trouvé ce document utile (1 vote)
108 vues42 pagesTitre original
commande_en_vitesse_de_la_machine_asynchrone .pdf
Copyright
© © All Rights Reserved
Formats disponibles
PDF ou lisez en ligne sur Scribd
Partager ce document
Partager ou intégrer le document
Avez-vous trouvé ce document utile ?
Ce contenu est-il inapproprié ?
Signaler ce documentDroits d'auteur :
© All Rights Reserved
Formats disponibles
Téléchargez comme PDF ou lisez en ligne sur Scribd
100%(1)100% ont trouvé ce document utile (1 vote)
108 vues42 pagesCommande en Vitesse de La Machine Asynchrone PDF
Transféré par
moiDroits d'auteur :
© All Rights Reserved
Formats disponibles
Téléchargez comme PDF ou lisez en ligne sur Scribd
Vous êtes sur la page 1sur 42
3éme PARTIE
COMMANDE EN VITESSE
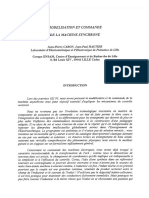
Afin de bien situer notre intervention, nous rappelons, a la figure 18,
Vorganisation fonctionnelle qui peut étre attribuée a un systéme électrotechnique
moderne {5]I6]. Ainsi, il apparait que le convertisseur statique est articulé autour
de deux axes :
un Axe de Puissance, faisant intervenir la source, les interrupteurs et
la charge,
un Axe de Contréle-Commande regroupant quatre niveaux :
Le bloc de contréle des Commutations (B.C.C.) dont la structure est
attachée A la technologie des interrupteurs utilisés (introduction de temps morts,
intelligence localisée, ... ).
L’Automate de Commande Rapprochée (A.C.R.), sous-ensemble regroupant toutes
les fonctions de type logique : séquence, réglage, _autopilotage,..._pouvant
nécessiter la mise en jeu de fréquences élevées. L'A.C.R. représente interface
indispensable entre la partie puissance et son dispositif de cond
Le MicroCalculateur Algorithmique (M.C.A.) dont le réle est d’assurer le
réglage du processus, via I'A.C.R., selon des critéres de conduite préci
L’automate de Contrdle des Modes de Marche (A.C.M.M.), qui a pour tache de
superviser le systéme en assurant les fonctions décisionnelles de plus haut niveau
modes de marches, contréle et sécurité de fonctionnement, dialogue avec ’extérieur,
ete.
Ce découpage est essentiellement fonctionnel et ne présage, en aucun cas,
de organisation matérielle globale du systéme.
a
[AXE_CONTROLE-CUMMANDE
CONVERTISSELR CHARGE
AXE PUISSANCE,
ON
CONTROLE
BUS D/OBSERVATION
BUS DE
BUS D/OBSERVAT!
Figure 18 - Architecture fonctionnelle d’un systéme électrotechnique
VII_CONCEPT DE COMMANDE
Le variation de vitesse d'une charge mécanique quelconque nécessite le
contréle du couple de la machine d’entrainement.
Le couple électromagnétique de toute machine électrique découle de
Vinteraction de deux champs magnétiques et, plus particuliérement, de l’action d'un
flux ® sur un courant équivalent I tel que :
fe=k GAT wu-)
42,
Dans un moteur A courant continu, le flux @ est créé par |l’enroulement
inducteur fixe ou par des aimants (servomoteur) et le courant I circule dans les
conducteurs de I'induit en mouvement. L’axe magnétique de l'induit est alors maintenu
fixe et orthogonal au flux grace au dispositif balais-collecteur qui permet un
découplage naturel entre :
@ le réglage du couple par le courant d’induit,
@ le réglage du flux par le courant inducteur.
Dans ces conditions, Iexpression du couple se simplifie et prend une forme scalaire
instantanée :
Celt) = k g(t) iC) (wil-2)
Dans un moteur asynchrone, le produit vectoriel donnant |’expression du
couple peut prendre plusieurs formes tant en régime permanent sinusoidal (Cf. IlI-24
a III-31) qu’en régime transitoire quelconque (Cf. VI-I9 A VI-23). Toutefois, il
n’existe pas, comme dans la machine A courant continu, de découplage naturel entre le
réglage du flux et celui du courant, de sorte qu'il convient de recourir a des
artifices, & partir de considérations sur les diverses expressions du couple.
Dans tous les cas, Vobjectif visé est de retrouver, au moyen d'une
commande approprige, des caractéristiques de réglage similaires A celles du moteur &
courant continu et dobtenir ainsi une forme scalaire, avec découplage, pour
V'expression du couple.
VIII_LOIS DE COMMANDE STATIQUES (COMMANDE SCALAIRE)
Par définition, les lois de commande statiques découlent des expressions
établies a partir du schéma équivalent, en régime permanent sinusotdal.
VIII-1 Lois simplifiées
Lorsque le glissement est faible, l'expression III-27, qui
schéma équivalent a fuites totalisées au rotor, se simplifie et devient :
43
L'inductance de fuite N est donc négligée de sorte que la valeur efficace du flux
a pour expression :
(VLR)
—, 2 #
(RR)? + (LR + LR)” 0”
5 s sky) Ys
Ainsi, le réglage du flux apparaissant difficile a réaliser sous cette
forme, on procéde a des simplifications reposant sur des hypothéses essentiellement
validées aux vitesses suffisamment élevées ( > 25% de la vitesse nominale)
© Si le glissement est faible, ona gR, << R, dot:
et le couple permanent devient :
ven £
ce=3p(tr 2
s
wa-)
Le maintien du flux constant exige donc de fixer le rapport (V,/w,) quel
que soit le point de fonctionnement. Ce principe est le plus simple en matiére de
variation de vitesse du moteur asynchrone et, si w, est la seule grandeur de réglage
(en association avec V,), les caractéristiques mécaniques statiques forment une
famille de droites paralléles.
Ces caractéristiques sont donc limitées aux faibles glissements et le
couple délivré par la machine est alors déterminé par la caractéristique de la charge
mécanique entrainée (figure 19).
44
Figure 19 - Caractéristiques mécaniques statiques 4 flux constant
VIII-2 Réglage du couple
Lorsque, dans I’équation (VIII-1), le rapport (V,/w.) est maintenu
constant, le contréle du couple est obtenu par action sur la pulsation rotorique 4.
On se rapproche ainsi d’une loi découplée, mais ce contréle oblige a autopiloter la
machine de maniére A transformer la pulsation rotorique en grandeur indépendante,
done en grandeur de réglage.
La loi d'autopilotage fréquentiel découle de la relation de glissement
w= pate,
le signe caractérisant 1a nature du fonctionnement moteur ( >0) ou générateur ( <0).
Le schéma, donné figure 20, montre alors I'application de ce principe dans
une régulation de vitesse pour laquelle la pulsation rotorique w, est élaborée par le
correcteur de vitesse. Une telle structure de commande donne des résultats
satisfaisants pour les vitesses de rotation supérieures & 25% de la vitesee nominale.
Par contre, aux faibles vitesses, le couple est mal controlé, essentiellement en
raison des oscillations qui apparaissent sur le flux. La figure 21 montre des
résultats obtenus par simulation numérique mettant ces phénoménes en évidence [9] et
le relevé expérimental de la figure 22 confirme ces aspects, si on en juge &
I'évolution de Ja vitesse aux tous premiers instants du démarrage,
N.B. Les essais ont été menés sur une machine tétrapolaire de 4 cv , de tension
nominate 220 V, alimentée par un onduleur 4 Modulation de Largeur d’Impulsions [9].
45,
Figure 20 - Principe de la commande scalaire en mode autopiloté
120
0
= 15 um
=~ Couple résistent Cr
so] aw wee im tee deo toe ae tee eo eect
20
aot cen a>
Geo tw te aon am te sw tm deo ado
Figure 21 - Echelon de charge a faible vitesse (simulation)
Ht) ad |
Ny
Aan _
VITESSE (A) +37 te/minree VITESSE (+ 40 te/min/ae
covmant (©) + 2 wary courant (8) | 2 arti
Figures 22 - Comportement du variateur au démarrage
46
IX_CONCEPTS DES LOIS DE COMMANDE DYNAMIQUES
IX-1 Origine de la commande vectorielle
Les inconvénients précédents, sensibles surtout en basse vitesse, sont
palliés condition d’établir des lois de commande assurant un découplage dynamique
entre le réglage du flux et celui du couple. Une telle disposition conduit a
retrouver, tant en régime permanent que transitoire, une expression scalaire
instantanée du couple, comme dans la machine a courant continu.
C'est & ce niveau que la transformation de Park joue un réle essentiel. En
effet, Vanalyse des expressions du couple instantané (VI,19) & (VI,23), obtenues
grace au changement de coordonnées, fait apparaitre des possibilités d’expressions
scalaires simples, A condition d’annuler une des composantes de courant ou de flux
sur I'un des axes du plan (d,q). Cette disposition, qui consiste a orienter
convenablement le repére (d,q) a tout instant, débouche sur une commande dynamique de
la machine asynchrone, alors appelée commande vectortelle.
IX-2_Démarche dans le choix du référentiel
La machine équivalente de Park présente trois grandeurs de controle
indépendantes :
# ig et ig ¢ erandeurs électriques,
© 6, + grandeur angulaire électrique de calage du référentiel (dq) par rapport
au référentiel (a,b,c) (figure 16).
Dans ces conditions et avec la référence conceptuelle de la machine a
courant continu (interaction flux inducteur-courant d’induit), on _s’apercoit
immédiatement qu'il convient, dans la machine asynchrone, de faire porter le flux
inducteur équivalent par l'un des axes (d,q), le courant de l’induit équivalent par
Vautre avec, dans Iesprit, que I'on ne dispose que des deux grandeurs électriques
de réglage i,g et i... Ainsi, le référentiel est nécessairement attaché au champ
tournant et, comme les balais d'une machine a courant continu, il peut étre calé de
différentes maniéres dans l’objectif, par exemple, d’annuler une composante de flux.
Evidemment, selon le choix du calage, on aboutit a des modéles d'action
différents pour lesquels le couple et le flux peuvent étre réglés séparément, a
priori, & partir des courants statoriques.
47
X_COMMANDE AVEC REFERENTIEL ATTACHE AU FLUX ROTORIQUE
La figure 23 donne une représentation vectorielle dans I'espace-temps des
tux , et 8, par rapport aux axes &, B, et & Lene d est aligné avec celul dy
flux rotorique de sorte que la composante de ce dernier sur V'axe q est nue
Figure 23 - Calage du référentiel sur le flux rotorique
Si ce calage est maintenu en régime quelconque, expression (V1,23)
donnant le couple instantané devient +
ce = pM
PT bra t5q
conformément au but recherché.
Comme $4 = 0, les équations de Park (Cf. § VI-2-2) deviennent
oan}
48
avec pQ =
de. i
1g Mp GE. | Vitesse électrique du rotor.
X-1 Principe de commande
POSITION DU PROBLEME - L'objectif fixé est de pouvoir régler séparément le
flux et le couple (courant d’indult équivalent), sachant que les seules grandeurs
mesurables sont :
© la vitesse 9 et I'angle a,
© les courants i... iy et i,
alors que les grandeurs de commande sont v,4 et V,q qui agissent simultanément sur
les courants iy et i,q.
Sl Ceper et Syppp ‘désignent respectivement le couple et le flux de
référence, on débouche sur le schéma fonctionnel de la figure 24 qui explicite
globalement le principe de commande.
Sous un tel aspect fonetionnel, I’ensemble transformateurs de
coordonnées-moteur asynchrone constitue le processus commander au sens de
Vautomatique traditionnelle.
‘REGULATEUR DE TRANSFORMATEUR
CCOURARTS i"
“cour conownans
MACHINE
|ASYNCHRONE}
i
mee iy ‘TRANSPORMATEUR
DE
|AUTOPILOTAGE| it ‘COORDONNEES
Figure 24 - Architecture fonctionnelle de la commande
(référentiel attaché au flux rotorique)
49
X-2 Analyse du systéme
RECONSTITUTION DU FLUX - Sachant que #, = 4 =Migg + Lipg le flux
sfobtient en remplagant i,4 (non mesurable) dans I'équation rotorique "é", d’oi :
= M i
tra” Tp ‘sd (X,2)
ri
et en posant i, = 9,4/M , image du flux ou courant magnétisant, nous obtenons =
1
+
14th &
x3)
4
Le couple a alors pour expression
2
Mw i
Com PE My tg = Eyl 9) ify 4)
(Ces deux derniéres expressions, valables pour un moteur 4 cage, expliquent les
grandeurs entre parentheses sur le schéma fonctionnel).
AUTOPILOTAGE (Calage du Référentiel) - Le référentiel (d,q) tourne a la
vitesse du champ tournant -& condition de réaliser, avec la condition ¢.4 = 0, un
autopilotage angulaire tel que
o,= «te,
Sachant que Gg" M i,q + Lpi,q = 0, la pulsation rotorique s'obtient en
remplagant i,q (non mesurable) dans I'équation rotorique "a", d’od
M_,
8 ey Ia (,5)
et il en découle :
M
et f ph iva + 0 6)
4 otra 84 ~
avec 4 : valeur initiale de 0, (constante d'intégration).
so
défini précédemment, on obtient
En remplagant $4 en fonction du courant
¢
une expression adaptée au moteur a cage, soi
ne
esat Tr igg att 2, own
lo TT ‘sa r0
REGULATION DE FLUX ET COMMANDE DE COUPLE - La correction de I'écart entre
lux de ré le flux estimé ine it de
le flux de référence (consigne ipapp) et le flux estimé (1,) détermine le courant
re talgorithme du correcteur ‘onc dynamique
éférence iagpp- L’algorithme d ‘teur est choisi en fonction de la dynamiq
du processus qui sera étudiée par la suite.
Un opérateur calcule alors le courant de référence (ijappp) @ partir du
flux Cepppp et du flux estime #5 (i,), soit :
Ly
—"_ ce
PM ¢, CREF
‘sqREF
ou encere :
\gqrer “Ce Re ad
qv st Ty
REGULATION DES COURANTS ~ Les grandeurs ¢,4 et ©, représentent les écarts
a
entre les courants statoriques (d,q) et leur référence respective. L’algorithme de
correction est également déterminé en fonction de la dynamique du processus.
La sortie de ce bloc de correction fixe, a tout instant, les grandeurs v4
et vgq aul agissent simultanément sur les flux 9,4 et @,q comme le montrent les
équations statoriques (X,l). Il existe done, entre les actions de v,4 et v4 sur les
‘sd
courants statoriques, un couplage dont il faudra limiter les effets .
TRANSFORMATEURS DE COORDONNEES STATORIQUES - Ces transformateurs ne sont
autres que les opérateurs matriciels correspondant & la transformation de Park (V,17)
telle que :
‘sa ‘sd
Vey) = | PO al 9)
y, v,
sc 0!
51
et
‘sal jeg
ing pw] fig, (x10)
iso) hee
avec Vgq = 0 et ¥ = 0, puisque le repére (dq) est attaché au champ tournant. Dans
4,
ces conditions, la vitesse du champ u, est égale A ar! et il est aisé de comprentre,
en examinant I’expression (X,1), que le régime permanent (avec alimentation par un
systéme triphasé de tensions équilibrées) se caractérise par des grandeurs
équivalentes continues.
» (Cf. ANNEXE Il_" INTERPRETATIONS A USAGE PEDAGOGIQUE ")
X-3 Aspects de la mise en oeuvre : LE PROCESSUS
Dans la mise en oeuvre, le processus est composé de trois parties
essenticlles :
@ 1a machine,
© Vonduleur,
@ une partie de I'Automate de Commande Rapprochée, notamment la fonction
séquenceur ainsi que celle d'autopilotage, en raison méme des contraintes temporelles
qui se posent. Globalement, 1'A.C.R. délivre les ordres d’ouverture et de fermeture
des interrupteurs du convertisseur & partir d’informations issues du MicroCalculateur
Algorithmique.
N.B. Il convient de préciser ta distinction qui doit étre falte entre le schéma
fonctionnel de principe de commande (figure 24) et celut du systéme electrotechnique
global (figure 18). Cette distinction s'explicite en termes de rapidité de
traitement, comme nous l'avons précisé en introduction .
L'ONDULEUR - Une machine asynchrone, en commande vectorielle, doit
nécessairement é@tre alimentée par un onduleur fonctionnant en Modulation de Largeur
d'Impulsion (M.L.I.), Un tel choix permet d'assurer une rotation réguliére du champ
notamment aux fréquences basses et, pour la commande rapprochée du convertisseur, il
existe de nombreuses solutions : la ML.I. calculée en temps réel, exigeant une
architecture & base de processeurs rapides, la M.L.l. précalculée qui est une
solution de type séquenceur adressable, comme celle présentée dans la suite. (Le
lecteur pourra se reporter a la bibliographie (7] pour plus de détails).
52.
L'AUTOMATE DE COMMANDE RAPPROCHEE - Nous montrons qu'il est chargé des
taches dont Iexécutation doit étre rapide. Exemple : 1 degré électrique a 50 Hz
représente une durée de 55,6 us, ce qui signifie que la génération d’une onde 4
Modulation de Largeur d’Imputsion, ayant une résolution de un degré électrique,
nécessite une gestion fréquentielle 4 18 kHz.
Dans ces conditions, on a souvent recours une architecture cablée mettant
en oeuvre une mémoire comprenant les motifs de M.L.I. précalculés, comme celle de la
figure 25, Dans I’exemple, cette mémoire est partitionnée en 2* séquences (réglage de
tension) de 2™ états (réglage de fréquence) de la commande du convertisseur, grace &
un partage du bus d’adresses (alors & m+k lignes) (w).
MOTEUR:
& | ASYNCHRONE
ONDULEUR *K
(_Ta__, | cove
{modulo 1}
vfs,
COMPTEUR
{modulo
yw
Teéelage fréquence
rotorique
réglage tension’
eg
HORLOGE REP
MICROPROCESSEUR
Figure 25 - Architecture d’un Automate de Commande Rapprochée
(#) : LA TAILLE DE LA MEMOIRE PEUT @TRE SENSIBLEMENT REDUITE EN RAISON DES.
PERMUTATIONS CIRCULAIRES PERMISES PAR LES SYMETRIES DES MOTIFS DE COMMANDE.
53
naire vw."
Le microprocesseur délivre d'une part, le mot binaire wo, représentant la
pulsation rotorique w,, calculée & meee la relation (X,4) et, d'autre part, le
mot binaire V," représentant 14 valeur offic ce V,) des tensions telle que
vo= J sat sq (Cf. pages 25 et 26)
,M est transformée en un signal impulsionnel t,, alors appliqué @ un compteur modulo
mm; fl en est de méme pour le signal r,, issu du capteur d'impulsion, solidaire de
Varbre de la machine. Les deux compteurs jouent ainsi le réle d’intégrateur
numérique (modulo m) et, comme le montrent les chronogrammes de la figure 26, ils
délivrent deux mots binaires a® et 0," représentant respectivement, par rapport @ une
référence a priori arbitraire, 1a position du rotor et celle du flux rotorique. En
réalisant la somme algébrique a” + 0,", on définit cette référence qui n'est autre
de
. ‘i . 's
que 0,", mot binaire représentant I'angle 6, tel que 4, = ae -
Ce type d’architecture peut étre également mise en oeuvre pour la commande
scalaire vue en VIL
Figure 26 - Autopilotage angulaire numérique
54
X-4 Commande
gorithmia:
1 Position du_probléme
Dans tout systéme asservi ou régulé, les algorithmes de correction sont
déterminés en fonction de la dynamique du processus. Ce dernier est alors représenté
par un modéle, mis sous forme de fonctions de transfert ou d’équations d'état.
Dans le cas de la machine asynchrone autopilotée avec #4 apres
remplacement des flux en fonction des courants, les équations (X,1) deviennent :
digg ai,
Ved = Relea to Ly eT - & EM algg * bell - 9) aE
digg
Releg to by GET +o Lataleg + Eyl = 2) Ugly x,
i i a
e0tt RD?
boa ~ Esl, @
= fsa ~ "stsa rd
sachant que i,g = —“—y—==", ar
La manipulation de ces équations conduisent aux fonctions de transfert
suivantes :
1+ Ts 1
ig) = Te v.g(s) + ¢ T, (s)]
sd 1+ +T) s+eT,T, 8 Ri sd oe ea
1+ Ts (+e Ts)
i,g(s) = LO Yeq’®) - Te, = i, il
sale te ty ste tts? Bs 89 1+Ts %
solt :
ig) = Gils) [ G3(s) Veg) + G(s) if) 1
12)
igg(s) = G2) [ GALS) v,4(5) - 66(8) 1, 4(6) 1
3 (s : opérateur de Laplace)
Ces Equations montrent le couplage entre les actions de v4 et vzq ainsi que
les non-linéarités dues a la présence de la pulsation rotorique w, en facteur des
paramétres correspondants.
Il convient done de prévoir dans 1a commande, en plus de simples
correcteurs, un bloc de découplage linéarisant. Cette disposition permet d'une part,
un réglage des courants sans interaction et, d'autre part, une synthése aisée des
algorithmes grace a l'obtention de fonctions de transfert linéaires (Cf. ANNEXE IN).
Dans notre exemple, les actions des grandeurs d’entrée v.4 et vq peuvent
€tre considérées, respectivement, comme des perturbations pour les courants I,, et
i,q comme lexplicite la partie "processus" du schéma fonctionnel de la figure 27.
Ces actions sont mesurables, puisque ce sont les courants eux-mémes, de
sorte qu’elles peuvent étre compensées par I'introduction des fonctions de transfert
G15) et Gls) telles que +
to Ts)
ore) = $1 = iy, et cal) = GH = Lv, ee
r
_ PROCESSUS
Figure 27 - Découplage par compensation
On vérifie, dans ces conditions, que le processus découplé 4 commander
présente ainsi des fonctions de transfert linéaires Wi(s) et W2(s) telle que :
igg(s) = WIS) Uys) et Ios) = W2{s) us) 0413)
avec : Wis) = Gils).G3(s) et W2(s) = G2(s).G4(s)
N.B. Une étude plus approfondte de cette méthode pourrait montrer qu’il y a risque
d'instabilité st les paramétres évoluent dans le processus réel. En effet, si la
compensation est correcte, toute action sur Vune des entrées ne provoque aucune
varlation sur Uautre sortie. En revanche, une mauvaise compensation pourrait
provoquer une évolution de cette derniére sortie dans un sens tel qu’il y auratt
renforcement de taction, donc divergence du systéme. Une solution consiste, par
exemple, 4 fixer a priort, un gain plus faible dans les fonctions de transfert
compensatrices (G7 et G8) que celui des fonctions de transfert perturbatrices (GS et
6.
Principe de découplage d'un processus par retour d’état
Nous proposons ici une démarche différente, bien que conduisant au méme
concept dans le résultat.
FORMULATION D'ETAT ~ Tout processus ou tout systéme peut étre formulé sous
forme d'une équation matricielle de méme structure que I’équation différentielle du
premier ordre, soit :
s(x] - [elfx] + [es] fv]
Fete de, commande
ta vectors sornen (¥] ce) expe, 0) paruin ime mmr
[vy] -Ce][x]
87
Cette disposition conduit au schéma fonctionnel de la figure 28 (partie
PROCESSUS). Pour un systéme d’ordre n, comprenant donc n grandeurs d'état dans le
vecteur |X], la matrice [A] est carrée d’ordre n et il y a n intégrateurs.
Figure 28 - Principe de la commande par retour d’état
RETOUR D’ETAT ~ Si le vecteur [x] est accessible (directement ou reconstitué
au moyen d'un observateur [8)), on définit le retour d'état =
(v]-Cel{x] +(e] [e]
oa [u] aerinit te nouveau vecteur d'entrée, Cotte disposition conduit au complément
du schéma fonctionnel de la figure 28 (partie RETOUR D’ETAT) pour lequel on a :
tx}~[[el+Col Cel] Cel (fe) (oJ Le]
Le choix des coefficients des matrices [k] et [t] fixe 1a nouvelle dynamique
du processus.
DECOUPLAGE - Une méthode simple et classique [8] consiste a transformer le
processus d'ordre n en n intégrateurs tels que
&lx] - [v]
Dans ces conditions, il faut :
[al+Ce]{x]-[o] « fe} {e]- [1]
MATRICE MATRICE
NULLE rDeNTITE
58
N.B. Ce princtpe exige que la matrice d'appltcation [B] soit carrée et non
singultére, cette propriété étant liée 4 la notion de commandabilité que nous
n’évoquons pas tcl, eu égard a Vobjectif de cet article.
PROCESSUS DECOUPLE - Le moteur asynchrone commandé & 4, = 0 apparait comme
un processus d'ordre réduit a3 et, a partir des équations (X,1), on déduit :
Rix] - [a] fx] + [el fv]
isd s isd
i R, Fi
sa] = “rE, sa
i °
6 °
L
ost °
Fr,
sd
1
7 et,
sq
° °
Si les matrices de découplage sont :
oL, 0
0 et,
8
on vérifie que :
= tu, iat La
i i i i a (13)
avec u,, et U,, les nouvelles entrées de commande du processus.
59
NB. Avec ce principe, il y a, comme précédemment risque d’instabilité si les
coefficients évoluent. Or, en pratique, les paramétres de la machine tels que T, et
T, varient avec la température.
X-4-3 Organisation fonctionnelle de la_ commande
Les figures 29 et 30 représentent l’organisation fonctionnelle globale de la
commande ob on y trouve essentiellement :
@ Automate de Commande Rapprochée, vu précédemment, qui détermine les ordres
envoyés aux interrupteurs du convertisseur a partir des grandeurs V., w, et pQ,
@ le bloc de découplage et I’estimateur de flux,
@ les correcteurs des courants dont le réle principal consiste stabiliser le
processus découplé,
@ les régulations de flux et de vitesse.
ESTIMATION
DECOUPLAGE
Figure 29 - Schéma fonctionnel du processus avec flux rotorique orlenté
60
REGULATION DE FLUX ET CONTROLE DE VITESSE
Figure 30 - Régulations du systéme
I convient maintenant d’évaluer les paramétres de régulation les mieux
adaptés au processus @ commander. Pour I’application, nous nous rattachons & un
exemple tiré de la bibliographie [9] concernant la commande d'une machine
tétrapolaire ayant les caractéristiques suivantes :
Machine tétrapolaire de 4 CV - 220 V
R, = 14.0, L, = 0.24 H (soit T, # 0.7 9) , ¢ =O et T, = 0.125 5
CORRECTEURS DES COURANTS - En considérant le découplage réalisé par retour
d'état, le choix de correcteurs @ action proportionnelle (Al et A2) conduit & =
ina = HOES et i= Ati
ed" AIF fsa REF &t tog ” AEs ‘sq REF
Ces boucles internes ont pour role essentiel de prévenir Iinstabilite qui
pourrait provenir du découplage, comme nous I'avons mentionné plus haut au sujet des
variations paramétriques de la machine
Toutefois, les valeurs des paramétres AI et AZ ne peuvent pas étre fixées
arbitrairement, En effet, la dynamique propre du processus (machine) doit étre
respectée afin d'éviter des sauts de commande trop brusques, pouvant provoquer des
contraintes importantes et la saturation du systéme,
6
Les fonctions de transfert déterminées en X-4-1 peuvent renseigner des
possibilités dynamiques du processus. En effet, aux faibles vitesses (lA od la
commande vectorielle se justifie), ces fonctions sont peu couplées de sorte que Wi(s)
et W2{s) suffisent a caractériser la dynamique qui, d’aprés les valeurs numériques,
présente un mode dominant de type premier ordre.
En effet :
(+ 0.125 s)
wats) « —_U + O08 5)
(1 + 0.29 s) (1 + 7.2 10-8)
et W288 oo ors
La figure 31 donne les réponses indicielles de ces transmittances od on peut
constater la différence sensible entre les deux dynamiques globales. Ainsi, la boucle
de contréle du flux (par i,4) doit étre plus lente que celle du couple (par i,,), ce
qui parait évident lorsque Ion considére I’expression (X,3). En fait, une analyse
approfondie de la forme d'état vue en X-4-3 montrerait que le mode magnétique (flux)
est environ dix fois plus lent que le mode électrique (courants) [10].
2
Tine
Figure 31 - Réponse indictelle du processus aux trés basses vitesses
(ou processus découplé par compensation)
Remarque : Pour estimer le temps de réponse d’un systéme en boucle fermée, une
solution pratique consiste a prendre, 4 partir de la fonction de transfert du
processus a commander, la différence entre la somme des constantes de temps du
dénominateur et celle du numérateur. En général, cette disposition simple, prise a
priort, suffit 4 respecter les contraintes propres et 4 éviter des solicitations
trop brusques dans les régimes transitoires.
62
Ces considérations imposent alors, aux paramétres Al et A2 , des valeurs
conduisant a retrouver, en boucle fermée, des temps de réponse respectifs de 170 ms
et 17 ms pour i,g et i...
Or, les grandeurs i,,REF et i, REF proviennent des régulations de flux et de
vitesse de sorte que le choix des parametres de réglage doit étre réalisé
globalement.
REGULATION DU FLUX ~ La figure 32 donne, pour ce sous-systéme, un schéma
fonctionnel équivalent qui prend en compte le découplage linéarisant par retour
d'état et la stabilisation par le correcteur de courant.
CORRECTEUR
Figure 32 - Régulation du flux
La structure du correcteur est de type PI. afin de définir, en boucle
fermée, un comportement de type second ordre. Suite a la remarque précédente, le
temps de réponse global t_, de la boucle de flux est fixé a 170 ms et, pour que le
facteur d’amortissement soit optimal (¢ = 0.7), on choisit :
dod Al = 25
La figure 33 montre le lieu des racines de I'Equation Caractéristique du
sous-systéme et la valeur Ki = 1.48 conduit au résultat recherché puisque ¢ = 0.7 et
que la pulsation naturelle w, (1/z,) est de I'ordre de 17 rad/s.
Rappel : le temps de réponse d'un systéme du second ordre, dont la fonction de
transfert est a numérateur constant, est égal 4 TROIS fols 1a constante de temps,
lorsque le facteur d’amortissement est choisi a la valeur optimale.
63
aL
10, 9
“10h | compensation de
1 L i
4G 0 =28 T Te
= OTT mage, TCO |
1747006800 ej" 6.16)
Figure 33 - Lieu des péles de la boucle de flux ~ Réglage
REGULATION DE LA VITESSE ~ La figure 34 donne, pour ce sous-systéme, un
schéma fonctionnel équivalent qui prend également en compte le découplage linéarisant
par retour d’état et la stabilisation par le correcteur de courant,
1+
CORRECTEUR
Figure 34 - Régulation de la vitesse
La structure du correcteur est de type P.I. avec action dérivée dans le
retour. Ce choix est imposé par la nature de ce sous-systéme ob la perturbation (Cr)
est intégrée. La volonté d’annuler I’écart en régime stationnaire conduit a une
double intégration dans la boucle, facteur d’instabilité si des précautions ne sont
pas prises. En effet, I’équation mécanique s'écrit :
64
aa
I = Ce- cr
avec J le moment d’inertie des masses tournantes et Cr le couple (grandeur
Le couple moteur Ce est
esse) fourni a la machine entraii
indépendante de 1a
proportionnel au courant i, lorsque le courant magnétisant i, est maintenu constant
(Cl. X,4 page 41).
Suite a des considérations sur I'application, le temps de réponse souhaité
pour la boucle de vitesse est de 0.3 s. Le paramétre A2 est alors choisi égal a 180,
de maniére & imposer, a la boucle interne de courant, une dynamique conforme a la
remarque précédente. On définit ensuite, pour 1a boucle fermée, un comportement du
second ordre si les conditions sulvantes sont respectées :
1
fz= 556 ms et ty = Olds avec iy = 5.24
La figure 35 montre le lieu des racines de I'Equation Caractéristique de ce
sous-systéme et la valeur K2 = 0.02 conduit au résultat recherché, puisque ¢ = 0.7 et
que la pulsation naturelle w,, est de I'ordre de 10 rad/s.
a Sf 1
TOBY nase TOOT
IE 2ibl8emr-bP en jC 0.99) |
Figure 35 - Lieu des péles de la boucle de vitesse ~ Réglage
Remarques
© La technique du lieu des racines (Liew d’EVANS) est un outil pratique et
puissant pour la synthése des correcteurs [11]
6s
® Le lieu des racines d’un systéme du second ordre est un cercle lorsque
celles-cl sont complexes (con juguées).
© Dans le cas particulter d’une double intégration, tel que dans cet exemple, le
26ro (-1/t4) est le centre du cercle. Il a done pour module § w,, , ce qui en permet
une détermination immédlate, comme pourra le vérifler le lecteur.
© Tout zéro correcteur (action dérivée) introduit dans une boucle 4 des fins de
stabilité, doit étre placé dans la chatne de retour, contrairement 4 ceux qui
compensent directement des péles dans la chaine d'action. Cette disposition conduit 4
une fonction de transfert en POURSUITE (0/Qgp,) 4 numérateur constant et ne modifie
en rien la fonction de transfert en REGULATION (9/Cr).
X-4-4 Quelques résultats obtenus par simulation
Les essais présentés résultent d'un modale de simulation numérique de
Vensemble machine-commande , conforme & Iarchitecture fonctionnelle de la figure
24, ot le convertisseur (onduleur) est idéalisé, en ce sens que les grandeurs qu'il
délivre sont parfaitement sinusoidales.
La figure 36 montre une séquence de trois phases : mise en vitesse, palier,
inversion du sens de rotation lorsque la consigne Q,4¢ est fixée a 10 rad/s puis &
“IO rad/s. La charge Cr correspond a un couple de frottements secs de 20 Nm (valeur
nominate).
© Das Iinstant de I'application de Iéchelon de consigne (ppp), le couple
croft linéairement jusqu’a la valeur de 20 Nm, ce qui permet le décollage effectif de
Parbre. Pendant cette premiére phase, le systéme est en "boucle ouverte" et, d'apres
le schéma fonctionnel de la figure 34, on a
K2
Cote) = Gog byll = a) i, 2s) donc Celt) = 40 t
On constate que le démarrage a effectivement lieu aprés 0.5
© Le comportement dynamique global correspond a celui souhaité : second
ordre optimal avec un temps de réponse de 0.3 s.
© Le flux ne varie pas pendant les régimes transi
© Il n’apparait aucune surintensité du courant statorique i,,-
La figure 37 reprend le méme type d’essais lorsque la consigne Sapp est
fixée & 100 rad/s puis a -50 rad/s avec un couple de charge respectif de 20 Nm puis
de - 20 Nm.
66
SIMULATION NUMERIQUE MOTEUR_ASYNCHRONE
Courant magnétisant inr
0)
2o!
ao} ee
im de ore 1m te ve 2 fm 28
Taare Titesse @
10.0
- consigne & ref
6.0
t ts)
Courant statorique isa
“Nad Couple électronagnétique Cen
4.0
ts
4.0:
|-12.0.
|-20.0:
ouplage de isd et isa
Connande vectorielle
Figure 36 - Comportement dynamique du systéme en trés basse vitesse
(réponses indictelles 4 = 10 % du régime nominal)
67
SIMULATION NUMERIQUE MOTEUR_ASYNCHRONE
Courant magnétisant ime
12 Le L762
crad7a>
hoo.0
60.0
®
120
4.0)
120
|-20.0:
60.0
30.0
10.0
-to.0
[-30.0
{-50.0:
Counle électronagnétique Cen
=~ Couple résitant Cr
Commande vactorielle a Sra:
avec _découplage de isd et isa
Figure 37 - Comportement dynamique du systéme a vitesse moyenne
(réponses indicielles 4 # 50 % du régime nominal)
68.
XI_COMMANDE AVEC REFERENTIEL ATTACHE AU FLUX STATORIQUE
On peut imaginer caler, a tout instant, le référentiel (d,q) de sorte que
Vaxe d soit aligné avec le flux statorique. Dans ces conditions, la composante de ce
dernier sur V’axe q est nulle et I'expression (VI,19) donnant
devient
le couple instantané
CoP 4 ing
Comme #4 = 0, les équations de Park (Cf. § VI-2-2) deviennent :
on
Principe de commande
POSITION DU PROBLEME - L'objectif reste le méme : possibilité de réglage
découplé du flux et du couple (courant d’induit équivalent).
IDEE DIRECTRICE - Avec le référentiel
expression (X,5) prouve que le courant i, et
méme réle vis-a-vis du couple.
attaché au flux rotorique,
la pulsation rotorique w, jouent le
Nous recherchons alors, avec le référentiel attaché au flux statorique, une
relation liant A 14. A cette fin, nous expli
itons, dans les équations (XI,1),
Jes grandeurs rotoriques (ytnqrtpgiipg) en fonction des grandeurs statoriques,
sachant que ¢__=(
que $54)
On obtient
og = pe yg = © Lhd
ra og sted) >
(x1,2)
1 a
ta" Hoa ~Eglgg) > =:
69
de sorte que les équations rotoriques s'écrivent :
a a
Goal + TGP ~ Leleall +o 7, GO to Thydg = 0
(1,3)
a
Lyiggll + oT, FD - Tg - o L,
ica) &p =
Ces deux dernitres équations permettent d'exprimer i, en fonction de w, et
eek
fea Ty =) pis tees
i= », 1,4) ved
ogee eee got de We.
Lta +o T, wW Ce T4,) 7
L’expression du couple instantané devient :
T, -o)
2
= P Oca lq =P Gyql” ———>-z——> 4 aa)
sd sq Late Tee Te 7
N.B. En régime établi, les différentietles s’annulent (pulsque les grandeurs sont
continues) et en remplacant © et T,, en fonction de paramétres M,L,,L, et R, » le
lecteur peut retrouver l'expression du couple permanent (1,27).
En général, les valeurs de la pulsation rotorique et ordre de grandeur du
coefficient de dispersion condulsent & rendre négligeable le terme ( @ Tv)” (ce qut
correspond a la partle rectiligne des caractéristiques mécantques). On obtient :
2 TFa-%
— a (x1,6)
comp ,4)
Ls tot,
Ainsi, si le flux est régulé, le couple est linéairement 1ié A 1a pulsation
rotorique et, dans ces conditions, on peut envisager un principe de commande
différent de celui mis en oeuvre avec référentiel attaché au flux rotorique.
Notamment, la pulsation w, devient une grandeur de réglage du couple & un facteur du
second ordre prés, ce qui ne modifie en rien le concept de départ.
70
ne_commande
Analyse
RECONSTITUTION DU FLUX - Le flux est facilement estimable a partir de
V'équation statorique d. En effet, on a:
- J, (sq ~ Relea) tt + F540 o7)
AUTOPILOTAGE - Le référentiel (dq) tourne @ la vitesse du champ, a
condition de réaliser, avec la condition ,, = 0, I'autopilotage angulaire :
oz ato,
Il serait possible d'obtenir 6, par intégration de I'inverse de l’équation
(XI,4) et on déboucherait alors sur une commande similaire & la précédente.
En fait, cette équation nous montre que le courant i,, et la pulsation w,,
ont le méme réle, a la dynamique prés, ce qui ne pose aucun probléme particulier.
Dans ces conditions, on peut envisager un autopilotage fréquentiel tel que :
= pQ to,
od la pulsation rotorique est une grandeur de réglage. Le calage du référentiel est
alors assuré en imposant la tension v,, de telle sorte que =
Yeq Beleg * sted on
et la position 9, s'obtient par intégration,
REMARQUE FONDAMENTALE ~ On montre que le choix, ainsi fait pour le calage du
référentiel, conduit a un quasi découplage des actions de vzq et Vag:
A partir de la condition 9, = 0 et de I'équation rotorique q, on démontre
sq
la relation suivante
ty Raee Tt, 44 x,8)
wR tet. a a Ps
%ra
A partir des équations donnant les flux @,4 et @,4 en fonction des courants,
on exprime ify :
n
-t M
i a a a x19)
En remplacant dans (X1,9) le flux 9,4 donné par I'expression (XI,8) et en y
introduisant l'expression (X1,4) pour le rapport 1,7, il vient :
¢,
1 ‘sd [
sa" LZ
Ge t4)? + Tey - O- olse TH 1
a2 2
G +07 3) + @ Ty)
En considérant comme négligeable les termes (¢ 10,7, on obtient :
o.g(s) 1+ Ts
8 (x1,10)
ce qui prouve I'absence quasi totale de couplage entre I’action de v,, et le flux.
En régime permanent, ce résultat revient a considérer le modéle a fuites totalisées
au rotor.
ARCHITECTURE DE COMMANDE - L'utilisation des résultats précédents conduit &
la possibilité d’une commande niutilisant ni capteur de courant, ni transformateur de
coordonnées.
En exprimant le courant
fgg PAT (XIIO) dans W"équation statorique d OK,D,
on obtient :
TG +6 Ts)
s r
oa) = vegl®) oay
1+ +1) 8 +o TT,
ce qui confirme que le flux est simplement réglé par v.4
En négligeant, comme précédemment, le terme (oT,w,)” dans ’expression
(1,4), on obtient :
TL - @)
i,t) = ¢
te, Ko, (x1,12)
va, Li to Ts)
ad
On aboutit alors a une commande relativement simple comme celle que propose
le schéma fonctionnel de la figure 38.
2
REGLAGE DU FLUX BT DU COUPLE
AUTOPILOTAGE
Figure 38 - Schéma fonctionnel du processus avec flux statorique orlenté
Ainsi, le flux est obtenu au moyen d’un premier estimateur découlant de
Vexpression (XI,I). A. prior
si les paramétres de l'estimateur sont corrigés en fonction du régime de
celui-ci ne nécessite pas de bloc de régulation sauf
fonctionnement de la machine. En effet, il conviendrait, dans l’application, de
prendre en compte la température des enroulements qui influe sensiblement sur les
constantes de temps T, et T,
e Ot Tp
Un second estimateur, découlant de lexpression (XI,12), délivre le courant
nq’ Le calage du référentiel est alors assuré en imposant Ia tension v,, selon la
loi (XI,7) qui n’est autre que I'équation statorique q. Il va de soi que la précision
de Vangle de calage est directement attachée a celle obtenue lors du mesurage des
paramétres des estimateurs, done des caractéristiques de la machine.
13
Le bloc de régulation de vitesse se détermine aisément, puisque 1a relation,
entre la grandeur de réglage uw, et le couple Ce, est définie par l'expression (XI,5).
‘Automate de Commande Rapprochée et la Partie Puissance restent inchangés.
XI-4-3 Résultats d’une application
La figure 39 montre le schéma synoptique de réalisation d'une commande a
flux stastorique orienté.
Onduleur
cr. feo
AGA.
eat
* + (M.A. }@
Trterlege de
reception 1 etre
Mutiplexeur
kj
Reglste || Regie Tor. a
|d"émission| |de contrdle 8253 |>|
‘Carte Série A PCL812
v.
\[Restionnaire dinterruptions
higrarchisées 8259 a
UNITE CENTRALE
‘sério
Calculateur
Figure 39 - Schéma synoptique de mise en oeuvre
Dans une telle application, i convient d'abord de transformer les fonctions
de transfert des estimateurs et des correcteurs en algorithmes numériques. La période
<échantillonnage, notamment, doit étre choisie correctement, Nous ne pouvons pas,
dans le cadre de cette présentation, évoquer tous les détails, mais il convient de
préciser que l'absence de découpleur et de transformateur de coordennées permet une
mise en oeuvre au moyen d'un calculateur de moindres performances.
74
Lionduleur fonctionne en M.L.I, a la fréquence de 12 kHz. L'A.C.R, est un
peu différent de celui présenté a 1a figure 25, autopilotage étant assuré
globalement au niveau du calculateur. Il s'agit néammoins d'un séquenceur & mémoire,
fonctionnant de maniére autonome a partir des grandeurs V, et w, qui lui sont
fournies par le calculateur de commande algorithmique.
Les capteurs de courant ne servent qu’a reconstituer des grandeurs, notamment
le flux $4 afin de valider la loi de commande.
Les figures 40, 41 et 42 montrent des résultats expérimentaux obtenus lors
de démarrages avec consigne de vitesse fixée a 25, SO puis 100 tr/min. Le flux est
établi immédiatement avant l’application de I'échelon de commande de vitesee ; on
peut, du reste, remarquer une légére rotation de I'arbre de la machine pendant la
montée.
La mesure de vitesse, réalisée ici au moyen d’une dynamo tachymétrique, est
bruitée, mais il convient de faire remarquer la trés faible vitesse de rotation par
rapport au régime nominal (1500 tr/min). Ainsi, pendant la durée de ces régimes
transitoires, le flux ne varie pas et aucune surintensité n'est a constater sur le
courant, On remarque également que la composante ¢,, est quasi nulle (figure 42).
Acvimsse ® 17 tr/min/atv
Bi FE $y 0,8 wo/aiv
PIME BASE 0,5 s/div
=
=|
/ Vy
Figure 40 - Comportement dynamique du systéme au démarrage (Qpp_ = 25 tr/min)
18,
Aj vimesse 9 17° tr/nin/div Bo: COURANT dex 5 A/div
Bi FLX 04 Mo/aiv TB: TIME BASE 0,4 s/dlv
mB; TRE BASE 0,4 a/div
FL cl
A lATA
BEL tH
Figure 41 - Comportement dynam{que du systéme au démarrage (Qpp_ = 50 tr/min)
nS Nei AL MUX dq 1 wo/atv
Bi veressz] 40 tx/min/aiv aq 1 Wo/atv
7B: TMG BASE 0,5 s/div mB: TMG BASE 0,4 e/aiv
A: CORRE
\
Al nl f / Lt
Figure 42 - Comportement dynamique du systéme au démarrage (Gprp = 100 tr/min)
F
76
ANNEXE I
INTERPRETATIONS A USAGE PEDAGOGIQUE
SUR _L'EQUIVALENCE
Lorsque le référentiel est attaché au champ tournant, on constate que le
régime permanent se caractérise par des grandeurs continues (flux, tensions,
courants). On peut alors donner une équivalence physique @ cette transformation si on
imagine entrainer le stator A Ia vitesee w./p , a condition de I’alimenter par des
sources continues de tension. Celui-ci peut étre diphasé ou polyphasé, seule compte
la résultante des flux créés par chacun des enroulements et on pourrait ainsi se
ramener A un enroulement monophasé équivalent.
Supposons donc le stator triphasé réel entrainé a la vitesse du champ
tournant. La transformation de Park conduit a définir un stator diphasé équivalent
(pouvant étre matérialisé), tournant
la méme vitesse et alimenté par les tensions :
Ysa Ysa
03 POH) wen
“s0| ‘se
ay » 510 pilequilly a:
avec : ¥ = O,5 (constant) de sorte que $4 = 0 et v,4 = 0 puisqu’il n'y a pas de
composante homopolaire de tension.
En régime permanent, les équations de Park statoriques (X,1) deviennent :
Ysa = Relea
ve. = Rit
‘sq * Bskeq
et les courants continus i,3 et i,
ig, si:
sq
J, ont alors méme amplitude que les courants i,, et
7
Ysd = Yed * “s?sq
Yeq ‘sq 7 “ssa
Ces considérations expliquent ainsi I'apparition des f.e.m. de rotation uo,
ne correspond
et W9,4 On constate que la puissance électrique Vg j-lgg
qu'aux pertes Joule statoriques et que la puissance mécanique d’entrainement du
stator réel vaut :
Pom = %s(salaq ~ Feqisa)
dans laquelle on retrouve I'expression du couple donnée en (VI,19).
2_- SUR LE R2GIME PERMANENT SINUSOIDAL
Considérons le groupe d’équations de Park (X,1) en régime permanent.
Il vient +
Dans le repére tournant (d,q), on considére, au stator, les grandeurs
complexes Y, , I, et @, telles que :
Y= Veg + JY, tity et R= ey t Se
‘sd sq -
sq* ts = Tea
Dans ces conditions, Y, s’exprime au moyen des deux équations statoriques, soit
Yo" Palleg * 5 Tog) * Ugg ~ Sag) 7 Bale I Mee
L’équation rotorique devient +
8
En multipliant cette dernigre expression par (M/L,), puis en la divisant par le
slissement g sachant que M°/L, = L,(1 - o), on retrouve I'expression (111,21) soit :
M ;
SED ly tlhe dg = 0
uisque I = j I, et I
puisque I, = J
Ces résultats sont importants, car la figure 9% qui décrit le régime
permanent sinusoldal, explicite également le régime permanent en commande dynamique.
On constate ainsi que le flux rotorique est en quadrature avec la composante q du
courant statorique. Le but de la commande vectorielle est de maintenir, a tout
instant, la position de ces vecteurs afin de conserver la qualité du couple (absence
oscillations).
3. SUR LE DECOUPLAGE
La figure A6 représente un réservoir mélangeur recevant un liquide chaud et
un liquide froid dont les débits sont régiés par les vannes VI et V2.
(chau) Arid)
Vi V2
‘température
afreat. débit (proportionnel
——> au niveau)
Figure A6
Liobjectif visé consiste a régier indépendamment le niveau et la température.
Or, il est facilement compréhensible que toute action sur l'une des vannes agit
simultanément sur ces deux grandeurs : les effets sont donc couplés et le tableau
suivant résume les actions de maniére trés schématique.
79
vi v2 TEMPERATURE NIVEAU
7 > >
> < >
. < <
- < > <
> > - >
< < : <
> < >
< > < -
LEGENOE - <<:
DIMINUTION
AUGMENTATION
SANS EFFET
On constate que le découplage du contréle oblige, en fait, a un couplage
Particulier des actions. Si on admet (pour la facilité de compréhension), les mémes
variations de débit lors des actions sur les vannes, on déduit :
© que le niveau est réglé indépendamment de la température (qui reste fixe) par des
actions simultanées de méme signe sur Vi et V2,
© que la température est réglée indépendamment du niveau (qui reste fixe) par des
actions simultanées de signe contraire sur V1 et V2.
La figure A7 donne, un schéma de principe pour une telle commande, agissant
alors en tout ou rien. Le gain de chaque amplificateur serait a choisir en fonction
des paramétres du processus (températures, caractéristiques des vannes, pression,
etc..), Une représentation d'état montre que ce processus est non linéaire et &
effets couplés par les grandeurs de réglage.
Avan Po (chsud)
Réplage A | #
EAD 1
DIMINUER + V2 ({roid)
AUGMENTER
Régloge ee]
TEMPERATURE. —y
DMANUER a
Figure A7
20
CONCLUSION
Cette présentation est incompléte et il reste beaucoup a dire et détailler
par exemple, sur les techniques de numérisation ainsi que sur les choix
technico-économiques, la comparaison des performances, les domaines d'application
Nous espérons avoir atteint les objectif's prioritaires
© faire comprendre au mieux ces principes de commande,
© montrer I'évolution inéluctable de I'Electrotechnique.
En effet, on constate que la commande vectorielle, pour étre comprise et
appliquée, requiert de larges connaissances tant en Electrotechnique traditionnelle
qu’en Automatique et en Electronique.
Ainsi, la création des algorithmes de commande découle a la fois des
connaissances sur la machine et des principes d’asservissement et de régulation. Leur
mise en oeuvre, pour étre efficace, nécessite des opérateurs mathématiques rapides
(diviseurs, multiplieurs) existant sous forme de circuits analogiques. Les techniques
numériques, a base de processeurs de signaux, sont plus flexibles et offrent
davantage de possi
mais une étape supplémentaire est a franchir : la
discrétisation et les contraintes qu'elle entraine (échantillonnage, quantification,
conversion, ete...)
En fin, n’oublions pas que :
La simplicité technologique de la machine asynchrone conduit inévitablement a une
complexité de la commande, lorsque lobjectif est de retrouver globalement les
avantages d'une machine a courant continu, sans avoir a en subir les inconvénients.
Dans ces conditions, la fin justifie les moyens.
iy
{2
(31
(41
ts]
tel
m
[8]
191
iol
a
BIBLIOGRAPHIE
D. ROYE, D. DIALLO
La commande vectorielle du moteur asynchrone : Aspects pédagogiques
Journées d’études SEE, Décembre 1992 LILLE
J. LESENNE, F. NOTELET, G. SEGUIER
Introduction 4 l’Electrotechnique approfondie
‘Technique et Documentation
Ph. BARRET
Régimes transitoires dans les machines tournantes électriques
EYROLLES
J. CHATELAIN
Machines électriques
EPFL - Editions Georgi
M. GRANDPIERRE
Commande numérique des machines électriques
Thése de Doctorat d’Etat - L.N.P.T. TOULOUSE 1987
J.P. HAUTIER
Contribution a la conception des commandes dans les systémes
a convertisseurs statiques
Habilitation a diriger des recherches - Rapport de synthése
U.S.T.L. LILLE 1989
J.P, HAUTIER, M. GRANDPIERRE
Dispositifs de commande dans les systémes électrotechniques
Journées du club EEA - TOULOUSE 1991
P. BORNE
Commande et optimisation des processus
Méthodes et techniques de I'Ingénicur
Editions TECHNIP
Ph, THELLIER
Algorithmes de commande vectorielle pour un ensemble
‘onduleur-machine asynchrone
Mémoire d’Ingénieur CNAM - LILLE 1992
M. PIETRZAK DAVID
Algorithmes de commande d’un variateur électrique asynchrone
‘Thése de Doctorat d’Etat - ILN.P.T. TOULOUSE 1988
J.P. HAUTIER
Synthése des algorithmes de commande
Cours du CNAM = LILLE
Vous aimerez peut-être aussi
- Chap5 (Conv. Freq. Tension Intérmédiaire en U) PDFDocument43 pagesChap5 (Conv. Freq. Tension Intérmédiaire en U) PDFsperatePas encore d'évaluation
- Electronique de Puissance: Escription Des Phénomènes de CommutationDocument30 pagesElectronique de Puissance: Escription Des Phénomènes de CommutationOURO-AGOUDAPas encore d'évaluation
- MotorisationDocument91 pagesMotorisationmoiPas encore d'évaluation
- Biomechanical Energy Harvesting and Autonomous SystemsDocument8 pagesBiomechanical Energy Harvesting and Autonomous SystemsmoiPas encore d'évaluation
- DSP Lf2407ADocument92 pagesDSP Lf2407AFarid KhouchaPas encore d'évaluation
- Electron I Quel 2Document93 pagesElectron I Quel 2Hattab MakerPas encore d'évaluation
- Cours HacheursDocument90 pagesCours HacheursBouchakour SalimPas encore d'évaluation
- Modelisation Et Commande de La Machine Synchrone Par J.P Hautier J.P CaronDocument62 pagesModelisation Et Commande de La Machine Synchrone Par J.P Hautier J.P Caronmoi100% (1)