Académique Documents
Professionnel Documents
Culture Documents
M1Energ Revision
Transféré par
Rafika Hammoumi0 évaluation0% ont trouvé ce document utile (0 vote)
8 vues8 pagesTitre original
M1Energ-Revision
Copyright
© © All Rights Reserved
Formats disponibles
PPT, PDF, TXT ou lisez en ligne sur Scribd
Partager ce document
Partager ou intégrer le document
Avez-vous trouvé ce document utile ?
Ce contenu est-il inapproprié ?
Signaler ce documentDroits d'auteur :
© All Rights Reserved
Formats disponibles
Téléchargez comme PPT, PDF, TXT ou lisez en ligne sur Scribd
0 évaluation0% ont trouvé ce document utile (0 vote)
8 vues8 pagesM1Energ Revision
Transféré par
Rafika HammoumiDroits d'auteur :
© All Rights Reserved
Formats disponibles
Téléchargez comme PPT, PDF, TXT ou lisez en ligne sur Scribd
Vous êtes sur la page 1sur 8
Révision
• Réglage des correcteurs
• Par modèle désiré
• Par la méthode Ziegler-Nichols
• Par avance de phase
Réglage des correcteurs par modèle désiré
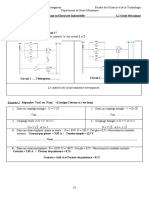
On considère le système de la figure ci-dessus où uc(t) est un
échelon unitaire.
Donner les FTBO1 et FTBF1 du système, KR étant un gain.
On prend KR = 1. Donnez les FTBO2 et FTBF2.
Discuter la précision et la rapidité du système entre boucle
ouverte (BO) et boucle fermée (BF).
On insère un régulateur C(p) = kp, dans la chaîne directe.
Donnez les FTBO3 et FTBF3.
Réglez kp pour obtenir en boucle fermée un système du 1er
ordre avec une constante de temps égale à 1s.
Correcteur PID par Ziegler-Nichols
Correcteur à avance de phase
• Performances désirées (stabilisation du système)
Marge de phase Mφd = 60° et temps de réponse tr5% = 3s.
Vous aimerez peut-être aussi
- Examen L2Document2 pagesExamen L2Rafika HammoumiPas encore d'évaluation
- CorrRattrap L2Document2 pagesCorrRattrap L2Rafika HammoumiPas encore d'évaluation
- Examenl21 2020Document2 pagesExamenl21 2020Rafika HammoumiPas encore d'évaluation
- L2 CorrigeExam2020Document8 pagesL2 CorrigeExam2020Rafika HammoumiPas encore d'évaluation
- Mesur Instrum Chap1Document15 pagesMesur Instrum Chap1Rafika HammoumiPas encore d'évaluation