Vous aimerez peut-être aussi
- 000n Yann Lecun Enjeux de Lintelligence Artificielle 20150201v3Document7 pages000n Yann Lecun Enjeux de Lintelligence Artificielle 20150201v3AngéniolPas encore d'évaluation
- Définition Mathématique: Modifier Modifier Le CodeDocument9 pagesDéfinition Mathématique: Modifier Modifier Le CodeSabah SabahPas encore d'évaluation
- Quelle Est La Différence Entre Machine Learning Et Deep Learning ?Document4 pagesQuelle Est La Différence Entre Machine Learning Et Deep Learning ?boutaynaPas encore d'évaluation
- Ai Pour DebutantsDocument9 pagesAi Pour Debutantsdiavotchka 12Pas encore d'évaluation
- Nathanael Taco IADocument8 pagesNathanael Taco IANathanaël TacoPas encore d'évaluation
- Les Réseaux de Neurones Artificiels (ANN)Document12 pagesLes Réseaux de Neurones Artificiels (ANN)michelone129925Pas encore d'évaluation
- Satge RapportDocument7 pagesSatge Rapportmed ayoub khPas encore d'évaluation
- Chapitre 3 - FiniDocument17 pagesChapitre 3 - Finiisk sedd100% (1)
- Chapitre 4 Conception de Capteur Intelligents Par DeeplearningDocument34 pagesChapitre 4 Conception de Capteur Intelligents Par DeeplearningIftissen NabilPas encore d'évaluation
- Réseaux de NeuroneDocument73 pagesRéseaux de NeuroneIbrahim Ben AbderrahmenPas encore d'évaluation
- Dans Le Domaine IADocument4 pagesDans Le Domaine IAseick moussa chehemPas encore d'évaluation
- Apprentissage Automatique - Machine Learning - 091317Document5 pagesApprentissage Automatique - Machine Learning - 091317Irène La MerveillePas encore d'évaluation
- Boids PaperDocument18 pagesBoids Paperseyba tourePas encore d'évaluation
- INF 365 ING-Données-Chap3 - 2019Document9 pagesINF 365 ING-Données-Chap3 - 2019NOUTCHEU CHOUBAELPas encore d'évaluation
- ARTIFICIAL NEURAL NETWORK (Enregistré Automatiquement)Document14 pagesARTIFICIAL NEURAL NETWORK (Enregistré Automatiquement)Van BabaPas encore d'évaluation
- INF365 Chap4 22Document10 pagesINF365 Chap4 22Armando Franck NguePas encore d'évaluation
- Python Inter B3 - 5Document7 pagesPython Inter B3 - 5elkemar le saoPas encore d'évaluation
- Rapport Sur: L'application Des Réseaux NeuronauxDocument28 pagesRapport Sur: L'application Des Réseaux NeuronauxNajlae ChtebiPas encore d'évaluation
- Reconnaissance Des Formes 18 05 2009Document15 pagesReconnaissance Des Formes 18 05 2009chihebabir1992Pas encore d'évaluation
- Interprétabilité en Machine Learning, Revue de Littérature Et PerspectivesDocument6 pagesInterprétabilité en Machine Learning, Revue de Littérature Et PerspectiveslutuyaelyseePas encore d'évaluation
- Res Eaux de Neurones Art If I Ciel SDocument13 pagesRes Eaux de Neurones Art If I Ciel SKhalifa BakkarPas encore d'évaluation
- Chap 3Document19 pagesChap 3Abdelfatah FerhatPas encore d'évaluation
- Intelligence Artificielle VS Machine Learning VS Deep LearningDocument2 pagesIntelligence Artificielle VS Machine Learning VS Deep LearningKarlPas encore d'évaluation
- Apprentissage AutomatiqueDocument13 pagesApprentissage AutomatiqueNajib Najib0% (1)
- L'intelligence artificielle: Les machines sont-elles déjà plus intelligentes que nous?D'EverandL'intelligence artificielle: Les machines sont-elles déjà plus intelligentes que nous?Pas encore d'évaluation
- E BookDocument12 pagesE Bookbrico johnPas encore d'évaluation
- Chapitre 1-Intoduction, Définition Et Application de Machine LearningDocument32 pagesChapitre 1-Intoduction, Définition Et Application de Machine Learningfedibouabid49Pas encore d'évaluation
- Syllabus de Programmation Orientée Objet 2023 BAC 2 INFODocument52 pagesSyllabus de Programmation Orientée Objet 2023 BAC 2 INFOMk SamaPas encore d'évaluation
- SecretDocument2 pagesSecretYasPas encore d'évaluation
- Le Deep Learning Définition Et FonctionnementDocument3 pagesLe Deep Learning Définition Et Fonctionnementnohaila nohaPas encore d'évaluation
- d51.2 - Me Eit-Aibd - Octobre 2021 - CorrigéDocument10 pagesd51.2 - Me Eit-Aibd - Octobre 2021 - CorrigéNatacha OzannePas encore d'évaluation
- TutoPython&KerasLesréseauxdeneurones-TutorielPython 1683742635968 PDFDocument23 pagesTutoPython&KerasLesréseauxdeneurones-TutorielPython 1683742635968 PDFkoudou EliePas encore d'évaluation
- L'intelligence Artificielle SymboliqueDocument9 pagesL'intelligence Artificielle Symboliquemichelone129925Pas encore d'évaluation
- IA Version 3 Mon Premier Cours RéduitDocument47 pagesIA Version 3 Mon Premier Cours RéduitWidad BananePas encore d'évaluation
- Exposé PMCDocument6 pagesExposé PMCAssad DaviesPas encore d'évaluation
- Ai MepDocument15 pagesAi MepAchraf RamiPas encore d'évaluation
- Partie 2Document4 pagesPartie 2Hajiime HinataPas encore d'évaluation
- Sujet VISION Tensorflow ROBIA 2023 P1Document11 pagesSujet VISION Tensorflow ROBIA 2023 P1alexis.thomasPas encore d'évaluation
- Cours RNDocument13 pagesCours RNCédric KuetePas encore d'évaluation
- TIA - Cours - Chapitre1 - Généralités Sur Le Soft ComputingDocument6 pagesTIA - Cours - Chapitre1 - Généralités Sur Le Soft Computinglounes djayetPas encore d'évaluation
- 1-Introduction Aux RNADocument20 pages1-Introduction Aux RNAHiba SaghirPas encore d'évaluation
- OMEREDIAPODocument41 pagesOMEREDIAPOBajikila AmandPas encore d'évaluation
- Cree Une Intelligence Artificielle - L'essentiel Sur Le Reseau de Neurones Artificiels - PRT 1Document5 pagesCree Une Intelligence Artificielle - L'essentiel Sur Le Reseau de Neurones Artificiels - PRT 1Dieudonné GBEMENOUPas encore d'évaluation
- Introduction Lapprentissage Automatique EnspsDocument18 pagesIntroduction Lapprentissage Automatique EnspsYouth ZoomPas encore d'évaluation
- Introduction À L'apprentissage Automatique.1Document4 pagesIntroduction À L'apprentissage Automatique.1aya bouremanaPas encore d'évaluation
- Support de Cours - IA - GenerativeDocument5 pagesSupport de Cours - IA - GenerativeAbedalwahabe ElbadaouiPas encore d'évaluation
- Intro Machine LearningDocument240 pagesIntro Machine LearningBossa Mulamba100% (1)
- ReservoirDocument11 pagesReservoirkarel nkpwangPas encore d'évaluation
- Cours RNNDocument28 pagesCours RNNKen ZaPas encore d'évaluation
- Machine Learning Avec PythonDocument8 pagesMachine Learning Avec Pythonhyacinthe d'almeida100% (1)
- Chapitre 1 Concepts de Base de La PooDocument20 pagesChapitre 1 Concepts de Base de La PooAnicet KrennaPas encore d'évaluation
- la-cyber-IA-de-Vectra-FR BNDocument18 pagesla-cyber-IA-de-Vectra-FR BNcoulibaly zonzeriguePas encore d'évaluation
- 2023-04-06 Eclairage Sur CHATGPT FRDocument15 pages2023-04-06 Eclairage Sur CHATGPT FRsergemartinbkkPas encore d'évaluation
- Diag Neuro FloueDocument5 pagesDiag Neuro FlouejacklombertPas encore d'évaluation
- Convolutional Neural Networks (CNN) and Deep LearningDocument6 pagesConvolutional Neural Networks (CNN) and Deep LearningMOHAMED ABDELMALEKPas encore d'évaluation
- Le Deep LearningDocument1 pageLe Deep LearningMichael ChallengerPas encore d'évaluation
- Intelligence Artificielle Et Réseaux de NeuronesDocument73 pagesIntelligence Artificielle Et Réseaux de NeuronesJoël J.JOURNAUX100% (1)
- Réseau de Neurones Artificiels - Qu'Est-ce Que C'est Et À Quoi Ça SertDocument6 pagesRéseau de Neurones Artificiels - Qu'Est-ce Que C'est Et À Quoi Ça SertParfait Sylvanus Zanclan AHOUANTOPas encore d'évaluation
- Huawei Cloud SecurityDocument4 pagesHuawei Cloud SecurityRavaka DiamondraPas encore d'évaluation
- Workbook Philippians FRA 4Document13 pagesWorkbook Philippians FRA 4Ravaka DiamondraPas encore d'évaluation
- Itm - Responsable Logistique 1Document3 pagesItm - Responsable Logistique 1Ravaka DiamondraPas encore d'évaluation
- Itm Coordonnateur-1Document3 pagesItm Coordonnateur-1Ravaka DiamondraPas encore d'évaluation
- Itm Assistante-1Document1 pageItm Assistante-1Ravaka DiamondraPas encore d'évaluation
- MathDocument55 pagesMathRavaka DiamondraPas encore d'évaluation
- Règlement Intérieur D NOELADocument9 pagesRèglement Intérieur D NOELARavaka DiamondraPas encore d'évaluation
- 2011LARE0016 CapredonDocument195 pages2011LARE0016 CapredonRavaka DiamondraPas encore d'évaluation
- 08 ProbabiliteDocument6 pages08 ProbabiliteRavaka DiamondraPas encore d'évaluation
- CH6-orbitales HybridesDocument18 pagesCH6-orbitales HybridesRavaka DiamondraPas encore d'évaluation
- Document 570658Document135 pagesDocument 570658Ravaka DiamondraPas encore d'évaluation
- PDF Chronologie MadagascarDocument21 pagesPDF Chronologie MadagascarRavaka DiamondraPas encore d'évaluation
- FID FSS Manuel Comptable Version DéfDocument46 pagesFID FSS Manuel Comptable Version DéfRavaka DiamondraPas encore d'évaluation
- Tableau OECFM 2017-01 v1.4Document1 pageTableau OECFM 2017-01 v1.4Ravaka DiamondraPas encore d'évaluation
- Examen1 (2001)Document3 pagesExamen1 (2001)Ravaka DiamondraPas encore d'évaluation
- Epi PgeDocument76 pagesEpi PgeDominique ZuranoPas encore d'évaluation
- Tout de L Eps PDFDocument12 pagesTout de L Eps PDFyoussef naymPas encore d'évaluation
- Message Du Graal Tome 1Document232 pagesMessage Du Graal Tome 1magandfPas encore d'évaluation
- Fuite Des Compétence en Afrique FrancophoneDocument35 pagesFuite Des Compétence en Afrique FrancophoneGilbertOumPas encore d'évaluation
- Analyse Comparative Des Pratiques Des Bailleurs de FondsDocument90 pagesAnalyse Comparative Des Pratiques Des Bailleurs de FondsnasaPas encore d'évaluation
- Amelioration Du Climat Des AffairesDocument62 pagesAmelioration Du Climat Des AffairesAWARE GUEHIDAPas encore d'évaluation
- L'éducation Face À La MondialisationDocument12 pagesL'éducation Face À La MondialisationSibaPas encore d'évaluation
- Indices Et Indicateurs de Développement HumainDocument123 pagesIndices Et Indicateurs de Développement HumainRachid Ait MansourPas encore d'évaluation
- Sujets Corrigés BDocument50 pagesSujets Corrigés Btemoehaa.hokuinPas encore d'évaluation
- Livre Lepolitique de A Nouda v8 4 PDFDocument424 pagesLivre Lepolitique de A Nouda v8 4 PDFIlhamPas encore d'évaluation
- Information-Legale Dans Les Affaires-ActesDocument69 pagesInformation-Legale Dans Les Affaires-ActesDembele HervéPas encore d'évaluation
- Manuel Suivi Evaluation PNDP III FinalDocument72 pagesManuel Suivi Evaluation PNDP III FinalNankam pierre JoresPas encore d'évaluation
- ESL Brochure (FRA)Document162 pagesESL Brochure (FRA)Chesnel EKOGHAPas encore d'évaluation
- B - SSOs Ecosystem Mapping & Co-Working Spaces - Mapping in TunisiaDocument2 pagesB - SSOs Ecosystem Mapping & Co-Working Spaces - Mapping in TunisiaAkhiat KhadijaPas encore d'évaluation
- Evaluation Du PersonnelDocument31 pagesEvaluation Du Personnelrobert kamba mukedi100% (1)
- 1861 - L'Algerie Pour Les AlgériensDocument84 pages1861 - L'Algerie Pour Les AlgériensMarc MorellPas encore d'évaluation
- De La Justice Dans La Révolution Et DanDocument195 pagesDe La Justice Dans La Révolution Et DanLinda KaboudiPas encore d'évaluation
- Exam-Sess1 - 16 - Corrige Complet PDFDocument6 pagesExam-Sess1 - 16 - Corrige Complet PDFJustine GengembrePas encore d'évaluation
- Devoir 1 Culture Générale Et Expression 2ème AnnéeDocument2 pagesDevoir 1 Culture Générale Et Expression 2ème Annéeveronica RPas encore d'évaluation
- Kant - Qu' Est Ce Que Les LumieresDocument7 pagesKant - Qu' Est Ce Que Les LumieresEce Gülser100% (1)
- Domovision AubainDocument63 pagesDomovision AubainDestinPas encore d'évaluation
- Mémoire Les Impacts de La Digitalisation Sur Efficacité Du Dialogue Soc...Document103 pagesMémoire Les Impacts de La Digitalisation Sur Efficacité Du Dialogue Soc...Mohamed El100% (3)
- François Bordes: Penser Le Labyrinthe - Archives, Démocratie Et CréationDocument8 pagesFrançois Bordes: Penser Le Labyrinthe - Archives, Démocratie Et CréationDavo Lo SchiavoPas encore d'évaluation
- Entrepreneuriat Social - Innover Au Service de L'intérêt Général PDF - Télécharger, LireDocument8 pagesEntrepreneuriat Social - Innover Au Service de L'intérêt Général PDF - Télécharger, Lirekhaled rafikPas encore d'évaluation
- Tableaux de Bord Manager Innovant DossierDocument29 pagesTableaux de Bord Manager Innovant DossierRiyad BENZIANPas encore d'évaluation
- Leçon InauguraleDocument26 pagesLeçon InauguraleMapucheGRPas encore d'évaluation
- A. Loisy, Autour D'un Petit LivreDocument350 pagesA. Loisy, Autour D'un Petit LivreaufklaerungPas encore d'évaluation
- GD Monitoring Evaluation Learning Resilience 190618 FRDocument32 pagesGD Monitoring Evaluation Learning Resilience 190618 FRLuce DambaPas encore d'évaluation
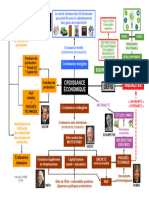
- Term 01 - Croissance - C - CMDocument1 pageTerm 01 - Croissance - C - CMcacojolie44Pas encore d'évaluation
- Programmes de Philosophie 2018 PDFDocument74 pagesProgrammes de Philosophie 2018 PDFTeresa WrightPas encore d'évaluation