Vous aimerez peut-être aussi
- Check-List Hse BouiraDocument8 pagesCheck-List Hse BouiraManseur AmarPas encore d'évaluation
- Num 2Document2 pagesNum 2Cherry BmPas encore d'évaluation
- Schema Des EtudesDocument1 pageSchema Des EtudesLechelonPas encore d'évaluation
- TTS - Conditions Générales v1.4Document6 pagesTTS - Conditions Générales v1.4lvinchonPas encore d'évaluation
- 3 BPEL 1upDocument54 pages3 BPEL 1upMohamed AminePas encore d'évaluation
- Chapitre 2 Les Installations Eclairage Domestique PDFDocument25 pagesChapitre 2 Les Installations Eclairage Domestique PDFChristian0% (1)
- DEP Mécanique Dengin de Chantier Eleve ÉtrangerDocument3 pagesDEP Mécanique Dengin de Chantier Eleve ÉtrangerMch HamidiPas encore d'évaluation
- Votre Reçu de Billet Électronique Courjonodile 25sep2023 Paris MadridDocument2 pagesVotre Reçu de Billet Électronique Courjonodile 25sep2023 Paris Madridodile.courjonPas encore d'évaluation
- Tubaro - Le-Micro-Travail-En-France - DiPLab-2019Document73 pagesTubaro - Le-Micro-Travail-En-France - DiPLab-2019lorenamfPas encore d'évaluation
- Module 6 Suivi EvaluationDocument20 pagesModule 6 Suivi EvaluationJonas HabaPas encore d'évaluation
- CSE Instructor Materials Chapter3Document28 pagesCSE Instructor Materials Chapter3Linux HamzaPas encore d'évaluation
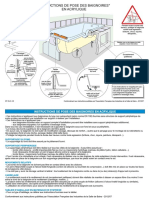
- Instructions de Pose Des Baignoires en AcryliqueDocument2 pagesInstructions de Pose Des Baignoires en Acryliquecloud adsophPas encore d'évaluation
- IDsl 0310 FR FR-FRDocument476 pagesIDsl 0310 FR FR-FRBa MamadouPas encore d'évaluation
- Cahier Des Charges Logo DjiboutiDocument5 pagesCahier Des Charges Logo DjiboutiPierrick SossahPas encore d'évaluation
- Check-List CamionDocument1 pageCheck-List CamionabdouPas encore d'évaluation
- td7 1Document7 pagestd7 1saidPas encore d'évaluation
- Dossier de Cours Technologies WebDocument31 pagesDossier de Cours Technologies WebWilfrid GomadjePas encore d'évaluation
- Degrade Homme - Recherche GoogleDocument1 pageDegrade Homme - Recherche GoogleJulien OllagnierPas encore d'évaluation
- CV - Mokamanede Sandrina - Bep PDFDocument3 pagesCV - Mokamanede Sandrina - Bep PDFZoyea ZoyeaPas encore d'évaluation
- Chapitre 2 PDFDocument34 pagesChapitre 2 PDFDodo LinaPas encore d'évaluation
- RARH-Series Lightweight Hollow Plunger Cylinders FRDocument2 pagesRARH-Series Lightweight Hollow Plunger Cylinders FRjjh38Pas encore d'évaluation
- TD1-2020 CompressedDocument1 pageTD1-2020 CompressedBrice KouamPas encore d'évaluation
- Exercices Algebre Relationnelle+SQL-V2Document2 pagesExercices Algebre Relationnelle+SQL-V2Yassin HawariPas encore d'évaluation
- E4 Sirfi 1Document2 pagesE4 Sirfi 1Sirfi DannePas encore d'évaluation
- Cours RedactionDocument29 pagesCours RedactionBadia MahmoudiPas encore d'évaluation
- E TRACKER S DPT FRDocument62 pagesE TRACKER S DPT FRGábor NémethPas encore d'évaluation
- Vade-Mecum de Kinésithérapie Et de Rééducation Fonctionnelle Télécharger, Lire PDFDocument6 pagesVade-Mecum de Kinésithérapie Et de Rééducation Fonctionnelle Télécharger, Lire PDFAchraf RabadiPas encore d'évaluation
- 1 ToIP M FAYE AFIDocument14 pages1 ToIP M FAYE AFIOumoul BacharPas encore d'évaluation
- Etude Des PompesDocument8 pagesEtude Des Pompessaif amriPas encore d'évaluation
- Chapitre 5 Réseaux Mobiles SatellitairesDocument22 pagesChapitre 5 Réseaux Mobiles Satellitairesmohamed amine boukariPas encore d'évaluation