Vous aimerez peut-être aussi
- Pieces de Rechange Sadet 2011Document27 pagesPieces de Rechange Sadet 2011Ilyas AouladlahcenPas encore d'évaluation
- Etude Machine Asynchrone TriphaseDocument5 pagesEtude Machine Asynchrone TriphaseRomiald Noussi SohPas encore d'évaluation
- Entite RelationDocument2 pagesEntite RelationIlyas AouladlahcenPas encore d'évaluation
- Corrig Des TDDocument5 pagesCorrig Des TDIlyas AouladlahcenPas encore d'évaluation
- E4 Sirfi 1Document2 pagesE4 Sirfi 1Sirfi DannePas encore d'évaluation
- Outils Informatique Et Statistique Part2Document20 pagesOutils Informatique Et Statistique Part2Hadjer AdaidaPas encore d'évaluation
- IDsl 0310 FR FR-FRDocument476 pagesIDsl 0310 FR FR-FRBa MamadouPas encore d'évaluation
- CV - Mokamanede Sandrina - Bep PDFDocument3 pagesCV - Mokamanede Sandrina - Bep PDFZoyea ZoyeaPas encore d'évaluation
- CSE Instructor Materials Chapter3Document28 pagesCSE Instructor Materials Chapter3Linux HamzaPas encore d'évaluation
- 1 ToIP M FAYE AFIDocument14 pages1 ToIP M FAYE AFIOumoul BacharPas encore d'évaluation
- TP CCF 3h Programmation Centrale ELA 3000 2010-01Document4 pagesTP CCF 3h Programmation Centrale ELA 3000 2010-01Alain GeoffroyPas encore d'évaluation
- Malaxage Beton LCPC Oa41Document211 pagesMalaxage Beton LCPC Oa41dino cedricPas encore d'évaluation
- CV Abdelkebir DebbaghDocument1 pageCV Abdelkebir DebbaghAbdelkebir DEBBAGHPas encore d'évaluation
- Manuel GigamediaDocument5 pagesManuel GigamediaLaurent OlivierPas encore d'évaluation
- TD1-2020 CompressedDocument1 pageTD1-2020 CompressedBrice KouamPas encore d'évaluation
- Raissouni Et Al - Cartographie de La Sensibilité Des Sols A L'érosion, Au Niveau Du Bassin Versant de L'oued Laou (Rif Nord Occidental, Maroc) .Document1 pageRaissouni Et Al - Cartographie de La Sensibilité Des Sols A L'érosion, Au Niveau Du Bassin Versant de L'oued Laou (Rif Nord Occidental, Maroc) .AHMED RAISSOUNIPas encore d'évaluation
- Cours M2 ISTR v2Document34 pagesCours M2 ISTR v2Yasmine EL QOTNIPas encore d'évaluation
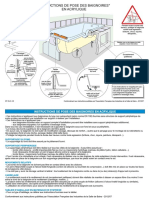
- Instructions de Pose Des Baignoires en AcryliqueDocument2 pagesInstructions de Pose Des Baignoires en Acryliquecloud adsophPas encore d'évaluation
- Vade-Mecum de Kinésithérapie Et de Rééducation Fonctionnelle Télécharger, Lire PDFDocument6 pagesVade-Mecum de Kinésithérapie Et de Rééducation Fonctionnelle Télécharger, Lire PDFAchraf RabadiPas encore d'évaluation
- Check-List Hse BouiraDocument8 pagesCheck-List Hse BouiraManseur AmarPas encore d'évaluation
- Tubaro - Le-Micro-Travail-En-France - DiPLab-2019Document73 pagesTubaro - Le-Micro-Travail-En-France - DiPLab-2019lorenamfPas encore d'évaluation
- Guide Utilisateur Prestashop 1.7Document312 pagesGuide Utilisateur Prestashop 1.7wxcvPas encore d'évaluation
- TTS - Conditions Générales v1.4Document6 pagesTTS - Conditions Générales v1.4lvinchonPas encore d'évaluation
- Cable Distribution FRDocument1 pageCable Distribution FRyoyorigolo9Pas encore d'évaluation
- Check-List CamionDocument1 pageCheck-List CamionabdouPas encore d'évaluation
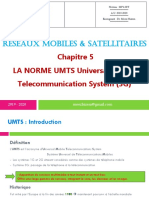
- Chapitre 5 Réseaux Mobiles SatellitairesDocument22 pagesChapitre 5 Réseaux Mobiles Satellitairesmohamed amine boukariPas encore d'évaluation
- Gestionnaire Administratif Et Comptable - Fiche de Poste 2023Document1 pageGestionnaire Administratif Et Comptable - Fiche de Poste 2023Armelle TapéPas encore d'évaluation
- L'Essentiel Automatismes Et Contrôle (PDFDrive)Document290 pagesL'Essentiel Automatismes Et Contrôle (PDFDrive)RénélicPas encore d'évaluation
- Etude Des PompesDocument8 pagesEtude Des Pompessaif amriPas encore d'évaluation
- DEP Mécanique Dengin de Chantier Eleve ÉtrangerDocument3 pagesDEP Mécanique Dengin de Chantier Eleve ÉtrangerMch HamidiPas encore d'évaluation
- RARH-Series Lightweight Hollow Plunger Cylinders FRDocument2 pagesRARH-Series Lightweight Hollow Plunger Cylinders FRjjh38Pas encore d'évaluation
- Ia l3 2019 CC SolutionsDocument3 pagesIa l3 2019 CC SolutionsAbdallahi SidiPas encore d'évaluation
- Schema Des EtudesDocument1 pageSchema Des EtudesLechelonPas encore d'évaluation
- E TRACKER S DPT FRDocument62 pagesE TRACKER S DPT FRGábor NémethPas encore d'évaluation