Académique Documents
Professionnel Documents
Culture Documents
Chap 0
Chap 0
Transféré par
Simplice0 évaluation0% ont trouvé ce document utile (0 vote)
12 vues65 pagesTitre original
chap-0
Copyright
© © All Rights Reserved
Formats disponibles
PDF ou lisez en ligne sur Scribd
Partager ce document
Partager ou intégrer le document
Avez-vous trouvé ce document utile ?
Ce contenu est-il inapproprié ?
Signaler ce documentDroits d'auteur :
© All Rights Reserved
Formats disponibles
Téléchargez comme PDF ou lisez en ligne sur Scribd
0 évaluation0% ont trouvé ce document utile (0 vote)
12 vues65 pagesChap 0
Chap 0
Transféré par
SimpliceDroits d'auteur :
© All Rights Reserved
Formats disponibles
Téléchargez comme PDF ou lisez en ligne sur Scribd
Vous êtes sur la page 1sur 65
A-
cos}
D-
Ee
NB,
CHAPITRE O
L'ALGEBRE DES OPERATEURS DE
MOMENT CINI
VALEURS PROPRES DE J? ET J, 3 BASE. STANDARD.
1 - Quelques propriétés utiles
2 - Sous-espaces irréductibles.
3 - Base standard...
OPERATEURS DE ROTATION. ..
1 = Définition, propriétés simples
2 = Structure du groupe.. a
3- Matrices de représentation du groupe,
4 - Construction explicite des matrices.
REUNION DE PLUSIEURS SOUS-SYSTEMES. .
(Composition des moments cinétiques)
1 - Position du probléme.
2 = Réduction de 1a représentation produit.
TRANSFORMATION DES OBSERVABLES. -
1 - Opérateurs de rotation dans 1'espace des observables.
2 - Opérateurs scalaires, vectoriels,
3 - Généralisation : opérateurs tensoriels irréductibles.....
THEOREME DE WIGNER-ECKART
1 - Démonstration
2 - Applications et exemples
+ Ce chapitre correspond d une différente présentation du cours de
celle du polycopié, auquel tl enprunte des éléments des chapitres
WI et VII. It est destiné a étre lu avant le polycopté lut-mime,
d'od sa nunérotation zéro.
rP?
+31
- 34
40
41
43
48
53
54
58
Ce chapitre est un premier contact avec un type de raisonnement
fréquent dans 1étude des symétries en mécanique quantique. I] illustre
bien la puissance de ce type de raisonnement car I'hypothese dont nous
partirons est trés simple : nous adnettrons seulenent que T'on peut définir,
dans l'espace des états & du systéme physique étudié, ltaction de trois
opérateurs hermitiques notés A, B et C, dont les relations de commutation
_stécrivent (#) =
(A, B] = iC
(B,C) = iA
Ic, A] = iB @)
(ces trois relations sont obtenues par permutation circulaire des opérateurs).
Un exemple bien connu de tels opérateurs est, pour un systéme constitué
d'une particule de position R et d'impulsion B, les trois composantes (divi-
sées par h) de moment cinétique orbital = Rx P .
De cette seule hypothése, nous allons voir qu'on peut tirer de
nombreuses conclusions :
+ Les valeurs propres de I'opérateur
D = AZ + B2 + C? (?)
ne peuvent prendre que certaines valeurs constituant un
ensenble discret.
+ La structure de l'espace des états & n'est pas quelconque :
& se décompose en sous-espaces “irréductibles" engendrés par
les kets de “bases standard" que nous définirons plus bas.
La dimension de & et les valeurs propres de D sont reliées.
+ Dans &, on peut définir I'action d'un groupe d'opérateurs R,
que nous appellerons “opérateurs de rotation", et dont les
matrices ne sont pas quelconques.
(@) Ona:
1A, alt = (ap - Balt = Bta* - atet = - (4%, 8°)
Le i des relations (1) est done indispensable si A, B et C sont
hermitiques.
+ Toutes les observables (#) A agissant dans I'espace des
Stats & peuvent subir les transformations unitaires associées
aux R. Suivant leffet de ces transformations, on peut dis-
tinguer parmi les A différents types d'opérateurs : opérateurs
scalaires, vectoriels, tensoriels, etc... Cette distinction
conduit au théoréme de Wigner-Eckart, dont les applications
sont nombreuses.
Une partie de ce chapitre n'est en fait qu'un rappel du cours
de mattrise de physique. Le probléme des symétries en mécanique quantique
est abordé ici de facon un peu technique, basée sur l'utilisation systé-
matique de calculs sur des commutateurs. Ceci permet d'introduire assez
rapidement des outils (en particulier le théoréme de Wigner-Eckart, déja
mentionné) qui sont utiles a d'autres cours ; on peut aussi introduire
simplement les notions d‘algébre et de groupe de Lie, de représentation
irréductible, dans un cas particulier. Dans les chapitres suivants, nous
reviendrons sur ces questions avec un point de vue plus général.
(#) Rappelons que le mot "observable" déstgne un opérateur hermitique &
spectre complet.
JET 32, BASE STANDARD
Pour pouvoir utiliser des formules déja connues sans changement
de notations, nous poserons
Ae Of B= dyn C= 0,/ (3-a)
ce qui revient a assimiler A, B et C aux trois composantes d'un moment
cinétique J.
Alors :
p= Jn? (3-b)
et les relations (1) peuvent étres écrites
BP Jz mye 9, (4)
sgt ah 2 ie ay
od
xp =X Xe x3
et
241 sii, J, k, sont une permutation paire de 1,2,3.
- 1 si la permutation est impaire.
0 si deux des indices i, j, k sont égaux.
i)
[dans le second membre de (*), 1a somme sur k ne comprend en fait jamais
plus d'un terme, et souvent I'on n‘écrit pas Te {]. Nous désignons par
pérateur_de moment cinétique” tout ensemble de 2 opérateurs satisfaisant aux
relations de commutation (*) ; cette dénomination sera justifiée plus bas.
Donnons quelques exemples d'opérateurs de ce type
(4) Pour une particule sans spin, nous avons déja cité le
moment cinétique orbital C = Rx P. Si la particule a un spin non-nul, on
définit dans son espace des états de spin & I'action de trois opérateurs
Sys Sy et S, satisfaisant les relations de commutation (4):
BS Jem 5
eae S
1% ee emat
Comme tous les opérateurs de spin commutent avec tous les opérateurs
orbitaux :
i, +5, ein Tey (ly +)
by, Bota [y+ Sx (8-b)
Donc f + $ est un opérateur de moment cinétique.
Exercice : montrer que { x $ posséde 1a méme propriété.
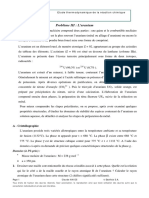
(ii) Prenons pour & ‘espace habituel a 3 dimensions et consi-
dérons une rotation de vecteur (*) infinitésimal 88. Comme le montre la
figure 1, cette rotation transforme un vecteur quelconque V en un vecteur
V! donné par :
V4 x Ve (4+ sax) V (ey)
Désignons par @ le vecteur unitaire a/a et par 6 I‘angle
infinitésimal de rotation :
6a = U oe (8)
La relation (7) exprime que l'opérateur de rotation infinitée-
simaleR est donné par
R (88) =H; (59) = A+ 03 x (°)
(a) Le vecteur & d'une rotation est par définition porté par L'aze de
rotation et de longueur a égale a L'angle de rotation (1a direction
de % détermine l'are autour duquel L'angle de rotation est posttif).
-6-
Introduisons les vecteurs unitaires @,, ey et &, des 3 axes de coordonnées 5
rotons Sa, 6a,, Sa, 1es conposantes de 68 sur ces axes, Uys Uy» U, celles
de U. Nous avons :
Risa)
+t sa, x
x &
+a 8 x
y
= T+ say Mh + bay TM, + 5a, ™M,
= a+ sim (29)
oa M désigne I'ensemble de 3 matrices suivant :
0 bo i jo -1
m= (0 0-1) my=0 0 9 m= 0 o
lo 1 9 ¥ bio o 0 0 (2)
11 est facile de vérifier que :
els ay by) dy
in (ay b, - a, dy) dy
+
5
ih (a, by = ay by) I, eC)
relation que nous pouvons écrire de facon plus condensée
(2-3,8- = in xb) eT (3)
Sous cette forme, nous voyons que les axes de coordonnées Oxyz ne jouent
aucun role privilégié : avec un systéme d'axes orthonormé quelconque
Ox'y'z', les relations de commutation entre composantes de J restent les
némes.
11 est commode pour la suite d'introduire les opérateurs :
+ 16
tty (6)
Ona:
(9,, a} = 2h oy (7a)
a, dL = 2 od tho, (7-6)
2-32 - a7
do, eB - 92 -n 9, (17-¢)
1
Bas (Id +0 0,) +0? (7-4)
Les propriétés suivantes peuvent alors étre établies (*) :
(4) Les valeurs propres de J2 sont réelles, positives ou nulles.
Elles seront notées :
i(j + 1) n?
od j > 0. Quant a celles de J,, nous les écrirons mh (m 20).
(ii) Dans T'espace des états, on peut prendre une base ortho-
normée de vecteurs propres communs a J? et J,. Ces vecteurs seront notés
\k, j, m>, od 1*indice k sert a distinguer entre eux les kets propres
relatifs a deux mémes valeurs de j et de m (k est utile si J? et J, ne
forment pas un £.C.0.C. a eux seuls).
(*) Nous ne donnons pas ict 1a démonstration de ces propriétés classiques,
qué fait partie du programme de la mattrise. On pourra la trouver dans
tout ouvrage de mécanique quantique, par exemple la référence (13),
chapttre VI, § C.
(iii) Ona:
-jemc4g (8)
Cette égalité peut étre montrée a partir du fait que le carré de 1a norme
des kets J, |k, J, m est positif ou nul.
(iv) J_|k, J, m> est un ket propre (non-nul) commun a J2, avec
la valeur propre j(j + 1)h2 (inchangée), et 3 J,, avec 1a valeur propre
(m - 1)h (diminuée de h), sauf si m= - J (le ket est alors nul).
(v) On a la propriété symétrique pour J, od 1'on doit remplacer
les - par des +:
J, 1k, J, m est un ket propre (non-nul) commun a J2, avec la
valeur propre j(j + 1)h? (inchangée) et a J,, avec la valeur propre
(m+ 1)h (augmentée de n), sauf si m= + j (le ket est alors nul).
(vi) A tout ket |k, Jj, m, Iaction des opérateurs J, et J_
permet d'associer une famille de (2j + 1) kets orthogonaux, associés a
Ja méme valeur de j et aux (2) +1) valeurs de m:
mej »j-l »d-2 > j+l raat
L'action de J_ (respectivement de J,) sur chacun de ces kets donne le ket
suivant de la famille (le précédent pour J,), sauf sur le dernier (le pre-
mier pour J,) sur lequel son action donne zéro.
(vii) Le nombre 2j est entier. Par suite :
_ soit j est entier, ce qui est alors également vrai pour m 5
| soit j est “demi-entier" (une fraction du type p/2 of p est impair et
positif), ce qui est alors aussi vrai pour m.
Introduisons alors l'ensemble d'opérateurs K(a), dépendant de
3 paramatres réels a,, ay et a,, condensés dans Ta notation & :
K(a)
Kays ays a,)
y
ay Ix tay dy + Az dy
Bicehs (3)
L'ensemble de ces opérateurs constitue une algébre (#).. (sur le corps des
réels) de dimension 3, si l'on définit 1a loi de composition interne de
produit par un commutateur =
K(a) # K(B)
FrKca), KB)
n k(& x B)
(nous avons utilisé la relation (15) ).
2 - Sous-espaces irréductibles
Nous allons maintenant définir une notion importante, celle
de sous-espace irréductible vis-a-vis de l'ensemble des opérateurs
K(@) = @ + Ide T'algabre ot.
Soit E un sous-espace de I'espace & od agissent ces opérateurs.
Nous supposons & stable (on dit aussi "globalement invariant") sous leur
action, clest-a-dire que :
|e = Ka) [het (2)
Si maintenant & peut s‘écrire comme la sonme directe
B-8,+%, (22)
de deux sous-espaces non-vides dont ‘un au moins (& ou &2) est également
stable sous l'effet de tous les opérateurs K(a), I'espace & est dit
réductible (par rapport @ l'ensemble ot d'opérateurs). Si une telle décom-
position est impossible, i] est dit irréductible.
(®) Rappelons que, par définition, un ensembles constitue une algébre si
Se est un espace vectoriel dans lequel on a défint une lot suppl émen-
tatve de composition interne (produit noté #) bilinéaive et distribu-
tive par rapport @ L'addition. En tout, 3 loisde composition, dnt 2
internes, sont done défints dans St: mLtiplication par un sealaire \,
addition et miltiplication internes.
-10-
Supposons & réductible et choisissons dans &,, stable sous
Jaction des opérateurs K(3), une base orthonormée que nous prenons pour
les pi premiers kets d'une base orthonormée (|y,*) de E (p; désigne 1a
dimension de @,). Examinons alors 1'allure des matrices M(&) associées aux
opérateurs K(a) 3 le fait que #, soit supposé stable entraine que :
(3)
od Tes zones hachurées symbolisent les éléments qui peuvent tre non-nuls
(Ithermiticité de 1a matrice impose que 1a nullité de tout élénent en
dessous de la diagonale principale entraine celle d'un autre élément au
dessus de cette diagonale). La matrice M() est done diagonalisée “par
morceaux".
Remarques :
(i) Les matrices M n'ont 1a forme (75) que dans certaines
bases particuliéres ; 1a réductibilité d'un espace ne se voit pas toujours
du premier coup dei] sur Tes matrices associées aux opérateurs dans une
base quelconque.
(44) Une matrice M donnée est toujours diagonal isable,
puisqu'hermitique. Vis--vis d'une matrice unique, & est donc toujours
réductible (en somme directe de sous-espaces de dimension un).
Nais, pour 1a notion de réductibilite qui nous intéresse, le
problame est 1a diagonalisation par morceaux simultanée de tous Tes M(2)
dans une méme base (et non une base dépendant de 4).
Si E est réductible, on peut donc le décomposer en deux sous-
espaces stables &; et & ; ces derniers peuvent éventuellement étre eux-
mmémes décomposés en somme directe de sous-espaces plus petits, etc...
eis
Par application répétée de cette procédure, on aboutit au bout d'un certain
temps & des espaces qui sont tous irréductibles (ceci arrive nécessairement
au plus tard quand tous les sous-espaces sont de dimension un). Ces sous-
espaces seront notés &
E-g ef ©... 08 (4)
1° Sty th
Si la dimension de & est infinie, cette somme peut éventuellement étre
également infinie.
Remarque
I] n'est pas évident que cette série d'espaces &, soit unique.
ce point sera discuté plus bas et nous verrons qu'effectivement les sous-
espaces & peuvent, en général, dépendre de 1a facgon dont 1a réduction de &
est effectuée.
3 - Base standard
Comme le montre la relation (18), i] est évidemment equivalent
de dire que & est globalement invariant sous I'action de toute composante
ay de J sur un vecteur u, ou sous I'action des opérateurs K(). I1 est
également équivalent de considérer ]'invariance par rapport aux 3 opérateurs
J,» J, et J_ qui, par combinaison linéaire, permettent d'engendrer J.
Le sous-espace irréductible & étant stable sous I'action de
Jys iT Test également sous celle de 3. Ceci signifie que l'on peut
diagonal tser Vopérateur J? 4 1'intérieur de chaque espace & et obtenir
un certain nombre de valeurs propres j(j + 1)h? 00 j = ji, ie etc.
Montrons que cette valeur propre est en réalité unique. En effet, si l'on
avait deux valeurs j; et jz différentes de j, & serait la sonme directe
de plusieurs sous-espaces orthogonaux associés a des valeurs propres dis-
tinctes de lopérateur J2. Comme J? commute avec toute composante de J,
ni Jy ni aucune fonction de J n'aurait d*élénents de matrice non nul entre
ces sous-espaces orthogonaux. Ce serait donc le cas des opérateurs K(a),
et la représentation serait réductible.
Done j a une valeur unique dans &. A partir de maintenant,
ce sous-espace sera noté &(r, §).
Soit |r, J. m> un ket de &(x, j), obtenu par diagonalisation
de J, dans le sous-espace invariant, et relatif 4 la valeur propre mh
(on peut par exemple choisir la valeur maximale possible, m= J). A ce
ket, on peut associer (cf § A-1, propriété (vi)] une famille de (2j + 1)
kets orthogonaux obtenus par action de J, et J_, qui sont vecteurs propres
de J, avec les valeurs propres at (m= J, j- 1,4 = 2)... ~ 3). Ces kets
appartiennent & &(x, j) {invariant sous ‘action de Js] et engendrent un
sous-espace de &(1, j) qui n'est autre que &(x, j) lui méme. En effet, ce
sous-espace est invariant par construction sous I'action de J), J, et J
done de tout opérateur K(3). C'est donc un sous-espace invariant de &(t, j)
et, ce dernier étant irréductible, ce ne peut étre que &(x, j) Tui-méme.
Montrons maintenant que, si |r, J, m est normé, les kets
lz, J, m+ I> associés aux valeurs voisines de m le sont également lors-
qu'ils sont définis par :
ted. m eh SGFT)= mm eT) |r, J, me 1>
(5)
Calculons pour cela 1a norme des deux membres de cette égalité. 11 vient
(puisque J_ est I'adjoint de J,) :
=
nEj(d + 1) - m(m 2 1)) est également
normé. Partant d'un ket |x, J. m> quelconque, les relations (75) peuvent
donc nous fournir une base orthonormée de &(r, j) ; elles nous permettent
de passer d'un ket |x, J, m> quelconque de cette base aux kets de valeurs
ise
voisines de m (*).
En résumé, les propriétés des kets |x, j, m> que nous avons
définis sont
J? [rs i, G(G + Un? |x, 5G, m
3, its i,m mi [ty J, m (28)
nh Vj(V* 1) > mm ST) |r, j,mtb
de |e, J, m
On a, de plus, la relation d'orthogonalité :
ty je mitts ity m'> = Sipe 855s Sam' (29)
[le 6, résulte de ce que les espaces &(r, j) sont par construction
orthogonaux entre eux ; 1€5 Spm, €t S;51 résultent de 1'orthogonalité
de vecteurs propres d'opérateurs hermitiques lorsqu' ils sont associés
des valeurs propres différentes) et celle de fermeture :
SS dm constitue ce que 1'on appelle une
“base standard” dans I'espace des états du systéme.
Ce type de base est particuli@rement bien adapté 4 1'étude des
propriétés du moment cinétique d'un systéme physique quelconque. En effet,
résumons les résultats obtenus :
la relation (75) a été prise pour
(8) Il faut en fait or que
définir, par acti. J, le ket |x, J, m+ I> a partir do It. i. om,
y de |t, i, m+ 2 a [ty J, m par
Pe
avrion de J_ (ou imorsemont, en venversant les rles de dy et o).
elle permet égatem
+
Cette propriété s'établit factlement en utilisant @ nouveau (19-b)
et (13-0),
_ Les éléments de matrice de J,, J, et J, sont imnédiatement
donnés par (28), compte tenu de la définition (18) de J, et J.
. Les espaces &(r, j) sont obtenus en regroupant entre eux
les (25 + 1) kets associés aux mémes valeurs de x, et de j, et en prenant
Je sous-espace qu'ils engendrent. Quelle que soit la nature du systéme
physique considéré, ces espaces &(r, j) ont toujours les ménes dimensions
23 + 1 [od j = 0, 1/2, 1, 3/2, .-. ete] et les mémes proprietés vis-a-vis
du moment cinétique total J: ils sont globalement invariants, et les
formules (18) permettent de calculer les matrices associées 4 tout opéra-
teur Jy ou K(&) & partir de 1a donnée du seul nombre j.
_ Une fonction F(3) quelconque du moment cinétique laisse
&(x, J) invariant et est représentée dans chaque &(t, J) par des matrices
qui ne dépendent que de F et non du systéme physique étudié.
La discussion qui suit s'applique donc dans tous les cas od
J'on étudie un systéme physique par 1a mécanique quantique.
Remarques
(i) Une autre facon de construire une base standard.
Supposons que 1'on dispose d'un ensemble d'observables Ky, Kas...
Kj» formant avec 3? et J, un £.C.0.C. Nous ferons I'hypothese supplémentaire
que les opérateurs K; conmutent, non seulenent entre eux et avec J,, mais
avec les deux autres ‘conposantes Jy et dy (Tes K; conmutent avec toute
composante J,, de J: ce sont des opérateurs “scalaires"). Dans ce cas,
les kets propres conmuns :
kis key cee Key eee bbe mm
as ke
a Ky, Koy «+++ Ky» J? et J, forment une base standard, a condition de fixer
leurs phases relatives par :
vee 5 J,
3 jm = (FGF) mlm T) [kis kos +++
Oylkiy key eee k
ay)
eGo
On notera que, pour pouvoir écrire cette égalité, il ne suffit
pas que (J,, Kj] = 0, mais 11 faut également que J,» Kj] = 0. L'opérateur
K sera par exemple, Ihamiltonien d'un systéme invariant par rotation.
(44) Revenons sur le probléme de I'influence de 1a fagon dont
est effectuée 1a décomposition de 1a représentation initiale en représen-
tations irréductibles.
Dans chaque &(1, j), la.valeur propre j(j + 1)h? de ¥ est
dégénérée (2j + 1) fois. Un cas particuli@rement simple est celui ou,
dans l'espace de réprésentation total, la dégénérescence de chaque valeur
propre de J? n'est pas supérieure 8 (2j + 1). Dans ce cas {ou J? et J,
forment un £.C.0.C. et I'indice + est inutile], &(x, j) ne peut étre que
Je sous-espace propre correspondant de J? et chaque valeur propre 5 (5+1)n2
fait apparaitre une fois et une seule 1a représentation irréductible
correspondante. La facon dont 1a décomposition est effectuée n'a donc
dans ce cas, aucune influence, ni sur les espaces &(x, j) trouvés, ni sur
les représentations irréductibles trouvées.
Dans le cas général, 1a valeur propre j(j + 1)n? peut @tre
(25 + 1) x q(J) fois dégénérée (00 a(j) entier], et on trouvera nécessai-
rement q(j) sous-espaces &(r, j) associés 4 1a méme valeur de j [le nombre
+ prend q(j) valeurs distinctes). Par suite, la représentation de dimen-
sion (2j + 1) apparaitra toujours q(j) fois, indépendanment de 1a fagon
dont 1a décomposition a été effectuée. Cependant, les sous-espaces &(t, J)
peuvent, eux, dépendre de cette décomposition. Prenons par exemple, deux
dtentre eux, &(1y, j) et 8(t2, Jj), et deux de leurs kets respectifs
Ixy, 3, m et |t2.J, m>. Au lieu de ces deux kets, on peut prendre un
ensemble de deux de leurs combinaisons linéaires, également, orthonormés
(par exemple, 1a somme et la différence, multipliées par 2” /2), par
action successive de J, et J_ sur ces deux nouveaux kets, on voit facile-
ment qu'on engendre deux families de (2j + 1) kets, combinaisons Tinéaires
{avec les mémes coefficients) de celles qui engendraient &(r1, j) et
&(x2, J) 3 ces deux nouvelles families engendrent deux sous-espaces
£(x';, Jj) et &(x'2, J) qui ont des propriétés identiques aux précédents .
Lorsque J2 et J, ne forment pas un £.C.0.C., les sous-espaces de repré-
sentations elles-mémes, peuvent dépendre de 1a fagon dont est effectuée
Ja décomposition de 1a représentation.
-16-
8 - OPERATEURS DE ROTATION
1 - Définition, propriétés simples
Revenons sur I'exemple d'opérateur de moment cinétique
J=inM
agissant dans l'espace habituel 4 3 dimensions et introduit en (13). La
composante
= ih ™
vy in my,
sur un vecteur unitaire quelconque étant hermitique, on voit facilement
que 1'opérateur
ef HM = 44 oT, + UOT)? + -- (22a)
est unitaire (le paramétre est supposé réel) :
eitdyn griodyy Lg (32-b)
En fait, cet opérateur est simplement 1'opérateur:2 (4) de rotation d'un
angle ¢ autour de U. Pour des angles dg infinitésimaux, ceci découle de
Ja définition méme de Wet J puisque, au premier ordre en dg :
eM ede dome. =D edn dM+ ... (33)
qui coincide bien avec le second membre de (1°). D'autre part, la rotation
d'angle 4 + d autour de 0 peut @tre obtenue par produit d'une rotation
d'angle ¢ et d'une autre d'angle dp autour du méme axe :
Rgldo) Ryo)
Rale + do)
[£4 dom Rylo) (3h-a)
Done :
ds »
a ale) = Mm Ryo) (3%-b)
avec la “condition initiale’
Ryle =0)=4
-c)
Il est facile de verifier que e? "u satisfait ces equations. Donc :
Raale) = ef = erie /* (35-a)
-W-
Si l'on introduit le vecteur
aot (35-p)
cette relation devient
RB) = eM =
Revenons maintenant au cas général od J est un opérateur
de moment cinétique quelconque. Par exponentiation, on peut associer
(35-¢)
& tout opérateur hermitique
poe ad
un opérateur unitaire :
3) 2 ec iK()/m Lia dn
Ra)
24-fan +d, Gae+.. (38-a)
qui sera aussi noté :
Rta) = Tul (36-b)
Nous avons :
at(a) = a7) = R(-8) (38-c)
Prolongeant ce que nous avons obtenu dans un cas particulier, nous appel-
Jerons “opérateurs de rotation" les opérateurs R.
Dans les chapitres ultérieurs de ce polycopié, cette dénomi-
nation sera justifiée plus en détail. Cependant, dés ici, nous pouvons
remarquer que les opérateurs R peuvent étre utilisés pour effectuer
une rotation sur le vecteur a. En effet, nous formons I'opérateur hermi-
tique
K(B) = 6.9 (37-a)
en un autre opérateur hermitique par 1'opération unitaire-Q (a) en posant
Kt = R(3) K(B) Rta) (37-b)
Lorsque 4 est un vecteur infinitésimal 6a :
R(da) = 4-p dT + .. (38-a)
et d'aprés (15) :
K
ct- ta. BH te Pad
8.3 - 214.5, BN + 0(5a7)
= b.3 4 (dd x B)T
2B (38-b)
avec :
Bis (44 dé x) B = R(da) B (38-c)
Donc, K' appartient & T'algébre XR:
K' = K(B') (33)
et le paramatre B a subi la rotation infinitésimale écrite en (?-c).
Par intégration comme en (3"), on peut ensuite passer a des
rotations finies, et ainsi montrer que, quel que soit @ :
kt = R(a) (6.3) rt(8)
= BY. = KB) (40a)
avec +
Be Qa) (#9-b)
Ltalgébre c% est donc stable sous I'action des trans-
formations unitaires construites a partir de ses propres opérateurs.
Remarque :
Les opérateurs R peuvent étre utilisés également pour trans-
former d'autres opérateurs R, si l'on pose :
ri = R(3) (6) RFC) (*t-a)
ua fh,
or:
n(a) (B.d" R*8)
= R(&) (By Re) x RB) EB Rta) x.
= (R (3) (Baty) = Gr.3)" (*1-b)
-19-
de sorte que :
iB In (1c)
j R(B') =e
| Vensenble © des opérateurs unitaires R est donc stable, comme 1'algébre
2 - Structure de groupe
Rappelons qu'un groupe est un ensemble muni d'une loi de
composition interne telle que
. tout élément du groupe ait un inverse
. il existe un élément neutre
. la propriété d'associativité soit vérifiée.
Pour l'ensemble ©, des opérateurs R(), i] nous faut montrer
que le produit de deux opérateurs R est encore un opérateur R (loi fermée) :
R(B) R(a) = R(C) vib (42)
Alors, l'inverse sera évidemment R(-a) et 1'élément neutre R(a = 0).
Lorsque B est paralléle a 4, Ja relation (*2) est vérifiée
si
c=a+68
et la démonstration est inmédiate.
Supposons maintenant 6 de direction quelconque, mais infinité-
simal ; nous choisissons la direction de 3 comme axe 0z. Le probléme est
alors de calculer le produit :
a(db) afaé,) = 1 FBS) eo 120,/n (a)
ou
db- -
46.3 = db, 0, + Sta + Ba, (#3-b)
Nous avons utilisé les définitions (18) de J, et posé :
ab, = db, = idd, (43-¢)
D'aprés (28), nous obtenons :
R(dB) R(aé,) [eo 5, me
evina §
U.
=F db, SICFIY =HHTY |r Jy m-d>
A= imdb») fro J, m
= 3 db_ ITTY MCAT |r, Je wl (4)
= 20 -
Calculons d‘autre part :
R(a + 8a) |t, 5, om a = ae,
Nous obtenons, au premier ordre en sa :
R(g468) = no 2, cb" tae, + 8.1"
+
tee
+ (68.3) ayn) + 0(6a2)
(8)
Posons
sa, = ba, ¢ i Say (88-a)
Alors
ee at ba-
8.3 = 4a, 0, + Salt Hoy, (#6-b)
et, dans le second membre de (“5), le terme en 6a, donne :
5 An ot
ga FA BT at ("ale 4,
n=l
= vida, mn et" |e, j, m ("7-a)
Celui en sa, donne (=) :
ay fa
Enel at
tym gel gcgey = amtmeTY (n)"
fy
S (mei) + (met) ms et |x, 5, ml>
t
(#) Nous utilisons 1a relation
i
= (zy) te’
avee
-21-
F
ae
s
s
=
2
i
:
(7-b)
Enfin, le terme en éa_ donne de facgon analogue :
salt
= L ayn
ehcp
lL acpety = m(miy (h)"
§ (me1)"") + (met) m+... + at
a
sa ;
=e [ec 1] SiaeTy > mmely |r, J, mel>
a
Ves 5, mb
fe 1;
(7-e)
Nous voyons alors que I'identification avec le second membre de ('") est
possible; $i nous posons :
\ 6a, = db,
sia
daa, =H ab ("8-a)
gray Ot
nous avons alors :
R(dB) (3)
{Comme (4a,)* = sa_, le vecteur 64 est bien réel]. La loi de composition
est donc bien fermée lorsque 6 est infinitesimal (un des opérateurs R
est infiniment proche de 4). On vérifie bien sur (“8) que si a + 0,
R(a + 6a) (*8-b)
6a + B
comme prévisible ; de méme, si db est paralléle aa, sb, est nul, et l'on
trouve 6d = db, ce qui était également prévisible.
Pour démontrer que 1a loi de composition est également fermée
lorsque B est fini, nous allons procéder nar intégration. I1 est commode
d'écrire la relation (*®-a) sous la forme :
= F(a). (Pec)
ou ¥ désigne un opérateur agissant dans 1'espace habituel, associé a une
matrice 3 x 3 dont on peut calculer les éléments a partir de ("*-a).
Commencons par donner le schéma de 1a démonstration, qui sera
ensuite précisée plus bas. Si 1‘on impose 3 6 un premier accroissement
~22-
infinitésimal db, (en partant de 6 = 6), les relations (“*) donnent :
R(dby) R(Z) = R(a + 681) (*9-a)
a condition de poser : Sa = 7 (a)-dby (“by
Mais la méme opération peut étre recormencée 4 partir de 1a nouvelle valeur
3 + 63, ; en effet, si l'on choisit un accroissement db, et si l'on pose :
a2 7 (3 + 68,).dB. (*8-c)
on ade méme : R(db2) R(Z + 62)) = R(a + b& + S82) (*8-d)
Or, le premier membre de cette égalité est égal d'aprés (**-a) a R(dB») R(dBi) x
R(a). Si maintenant db, et db, sont choisis paralléles, le produit R(db.) R(db,)
vaut simplement R( dd, + dbz) et l'on obtient :
R(db, + dbp) R(Z) = R(2 + 6a) + 582)
De proche en proche, on peut ainsi arriver au produit R(b) R(a), comme
schématisé sur la figure.
De fagon plus précise, on peut introduire un para-
métre t réel (que I'on peut interpréter comme le
temps), variant entre 0 et 1 de sorte que le vecteur
Bt) = tb (88a)
varie entre 0 et 5 en prenant des accroissements
toujours paralléles. Le vecteur §(t) est, d'autre
part, défini var 1'équation différentielle
& at) = Fp s+ F(t 18 (58-b)
avec 1a condition initiale : 5(t =0) = (88-c)
On a, quel que soitt: dd = F¢ +3) .4b (88-4)
et 1a comparaison avec (“?-b) et (*?-c) montre que di correspond bien aux
accroissements 6a: , 8a , etc... Changeons dans (“8-b) 2 ena +d et dB en
db' pour écrire : R(db') (2+ B(t)) = R(a +5 + dd) (58-8)
Done : d (RB + a(t)) 3 = [ (dB) - D] R(a + 3(t))
_ ee CF)
= (-p (Bd)dt 2 + H(t)
Par intégration, on obtient (*) : R(a + 3(t)) = R(B'(t)) Ra) (5°-g)
et donc, pour t = 1: R(c) = R(b) R(a)
avec : f=3+35(1)
(*) On vérifie irmdtiatement que (8°-f) eat abtenu par dérivation de fee
par Papport
~ 23 -
3 - Matrices de réprésentation du groupe
Soit (|u,>) une base de Iespace & od agissent Tes opérateurs
Jy. Dans cette base, les opérateurs unitaires R (@) sont associés 3 des
matrices M d'éléments :
= 13.3/n
Hott) = = }, les éléments
de matrice seront notés :
“18.30 |
Cl @) =< demic td, m> (83-a)
Utilisant (28) et (52-a), on constate qu'ils dépendent de j, metm',
mais pas de x (et qu'ils seraient nuls si le bra et Te ket étaient repérés
par des valeurs différentes des indices j ou 1). Lorsque j est fixé et que
met m' varient (entre +j et -j), on obtient des matrices RUS) de dimension
(2 + 1) (25 + 1). qui fournissent des représentations irréductibles du
groupe G.
La relation (53-a) est équivalente a :
Ra) fe dem = J REC) [ry ds mt (53-b)
d.
S30
Construisons explicitement les matrices (R'!) dans des cas
simples, c'est-a-dire pour les valeurs les plus petites de j. Pour cela,
41 suffit de choisir une valeur de j, d'utiliser les relations standard
(28) pour calculer les matrices associées 2 J, , J_ et J,, donc celles
associées 8 J,, Jy et J, ou J, pour @ quelconque. Par exponentiation, on
obtient ensuite les matrices R elles-mémes.
Cette valeur de j ne nous conduit qu'a la représentation dite "triviale",
de dimension 1. En effet, mne peut étre que nul [relation (2°)] et les
formules (2) donnent :
(Jy) = (0) (84a)
Pour les opérateurs de rotation, on vérifie immédiatement que :
(rts (e)) =) (5%-b)
quels que soient U et ¢.
v2
Les matrices sont alors des matrices 2 x 2. On obtient imédiatement (*) :
() = 4 ( 4 (58-2)
e i . 0 55.
: “6 i i rf ‘) (5-6)
\ d
h J bh “7
(Jy) = (Jy) (58-c)
oe J y 2 hg
Nous retrouvons donc les trois matrices de Pauli (a un facteur h/2 prés).
Quant 4 l'opérateur J?, i est associé a 1a matrice unité 2 x 2, multiplice
par 3h2/4,
(#) Par convention, et quelle que vit la valeur de j, nous rangeons toujours
les vecteurs de base par ordre de m décroissant :
ods dB bts ds doh, wees Ie ds
Ie a, dy
~ 26 -
Passons maintenant aux opérateurs de rotation finie. Par
exemple, par exponentiation de (55-a), on trouve sans difficultés :
~ig/2
(ay) = é vor} (68-8)
itésimal est :
De méme, pour une rotation autour de Ou, od l'opérateur infi
Jy Ue Ix Hy Yy * Up Je
On peut utiliser les propriétés des matrices de Pauli to? =U
pour obtenir :
(a! ‘algle))
(eu) = cos $- SB sing a.5
$ iulsing (iu - i
fos $- iu, sin§ (-1 uy - uy) sin
~ $ ¢ i in &
(-i uy + uy) sin F cos $+ iu, sin
(58-b)
Remarque :
Dans notre raisonnement, nous avons procédé par conditions
nécessaires, montrant quelle forme doivent avoir des représentations
irréductibles du groupe G . Réciproquenent, {1 est donc utile de verifier
que les matrices obtenues conviennent effectivement ; mais i] est trivial
de vérifier que les matrices (55) satisfont aux relations de commutation
requises. On peut également controler que les opérateurs ey" consti-
Tedtt bien un groupe (conme nous T'avons établi plus haut), car la relation
(58-b) donne 1a matrice unitaire 2 x 2 de déterminant 1 1a plus générale.
La dimension de la représentation est 1 dans ce cas et [cf note
précédente pour l'ordre des vecteurs de base] =
0 -1
bh ih
(7a) (aden fo 0 0) CQr2fr 0 Yoyy Zr o
° 0 - Melo YR
“1
par un raisonnement analogue a celui qui vient d'étre fait dans le cas ot
j= 1/2, on trouve :
Ae 0 0
(a5 ) o 1 0 (57-6)
2 tet’
-27-
et, par exemple :
Ki + cos ¢)/2 -sing/vZ (1 - cos $)/2)
(085 ) = [sing v2 cos ¢ -sing/ V2
y (1 = cos ¢)/2 sing/¥2 (1 + cos ¢)/2)
(7c)
be fagon analogue, on pourrait construire Ta matrice (R 11 (4) ) pour &
quelconque. .
nous allons voir,
Les matrices ainsi obtenues sont en fait bien connues :Vqurelles
ne sont autres que les matrices de rotation Gug(6) ) dans T'espace habituel ,
acrites simplement dans une base différente.
Un tel résultat était prévisible ; dans Itespace habituel &(3)
4.3 dimensions, nous avons défini plus haut 1'action d'un opérateur
J = ih a% satisfaisant aux relations de commutation d'un moment cinétique.
Tout le raisonnement que nous effectuons ici par un espace & quelconque
stapplique donc & &3) et, en consequence :
= Jar d
x Sy ee)
quetles sont les valeurs de j possibles priori, 1a dimension totale de
l'espace étant 3 ? Nous pouvons avoir :
3 fois j=0
ov lfois j
ov lfois j=l
‘
» 1 fois 3
Les deux premiares possibilités sont exclues par le fait qu'il n'existe
pas de direction (réelle ou complexe) dans &/3) qui reste invariante sous
}taction de toutes les rotations. Nous avons donc une fois j = 1 et les
matrices de rotation (2) sont irréductibles. Elles ne peuvent donc étre
que les matrices que nous venons de construire, & un changement de base
prés (matrices senblables) .
On peut effectuer de facon explicite le changement de base
(complexe) qui permet de passer des matrices (QQ) de rotation dans lespace
habituel aux matrices (R4 = 4), nous allons effectuer Te calcul, a titre
de verification, et surtout parce qu'il nous conduira 4 introduire une
base de vecteurs ly ; a> et ley dont nous aurons besoin au § D
suivant. Nous allong donc appliquer dans I'espace habituel 1a méme procédure
oR EOR RT RORRRAET
rca ea mermenenoner neninemnnnnnnccnnatmrnirnnecnnee
- 28 -
que celle qui nous a conduit aux expressions (°7) dans un espace &(x,J=1).
Pour prendre des notations habituelles 4 celles d'un espace des états,
appelons Ry oe ley >, 1g, > les vecteurs de base portés par un triédre
orthonormé Oxyz dans Vespace habituel.
Nous avons déja obtenu au § A [relations (7?)] I'expression
des rotations infinitésimales, et en particulier :
Ry (se) = 1+ som, (88a)
2
-1 0
nm, ieee (58-b)
0 9
comme dans un espace &(r, J), diagonalisons I'opérateur de rotation infi-
nitésimale autour de Oz. 11 est facile de diagonaliser (5%-b) et on obtient
Ja base (de vecteurs définis a un facteur de phase prés)
le = ee [Ike + 18]
le = (>
>= 4 [Ie : ity] (58)
11 nous reste, comme en (25), a définir la phase relative des
vecteurs de base. L'opérateur qui correspond ici a J, est ici =
int = in (M+ im) (80-a)
od M, et TM, sont Tes matrices écrites en (11), (Je in s'introduit
confornénent 3 (23)} On obtient dans 1a base initiale lee» Wey >» [eo t
inM, = bh [0 0 -i (60-b)
Par suite :
aio
Pour obtenir exactement les relations (57-a), nous sommes conduits 4
prendre la base :
ype Bee - 4 [i> + ila]
le> = lg>
> L 4 at 6
aca [lee - iy] (61a)
(clest 1a méme que 1a précédente, & un changenent prés de signe du premier
vecteur).
Compte tenu de I'expression (11), des matrices ™dans la
base initiale [&> » ley >, [é,> » on calcule aisément leur action dans
la nouvelle base lps f> + [ey> - Par exemple :
Se et ne net (81-c)
Cette expression, multipliée par ih, redonne bien la matrice de vy écrite
en (57a). Un calcul tout & fait analogue permettrait de verifier Ta méne
propriété pour mw, et Jy. Pour finir, par exponentiation, on passe des
rotations infinitésimales aux rotations finies et on vérifie ainsi que,
dans la base lp > \6> . (ey » les ee de rotation (Qi(¢) )
deviennent identiques aux matrices a!" 3(9).
Nous aurons besoin plus loin de la matrice S de changement de
base qui permet de passer des Wee . ey > (6 aux ley . lee > le,
Cette matrice stécrit :
ft o
ve
s- |-+ 0 (Sta
a )
0 1
Rappelons que, par convention, 1a matrice de changement de
base contient dans ses colonnes les composantes des nouveaux vecteurs de
base sur les anciens =
yy & &)
& 8 &) (s) (82-b)
$ est une matrice unitaire
st 2 st (82-c)
pire que les matrices (Q) stidentifient aux matrices (Ri) par te
cchangenent de base considéré, revient & écrire :
(etSBegy y= (sh) gle) ) (5) (63-a)
"7
ou, inversement =
(Bate) = 69) CREAMS (63-b)
i
C - REUNION DE PLUSIEURS SOUS-SYSTEMES
(composition des moments cinétiques).
Considérons deux systémes physiques P, et FH et le systeme
physique » constitué par l'ensemble des deux précédents. Si &, et £2
désignent les espaces des états associés a 7, et Jy respectivenent, celui
associé 8 P stécrit :
& = 8) 0, (8t-a)
Nous savons que I'action d'un opérateur de moment cinetique [ctest-a-dire
satisfaisant les relations de commutation ()) 3, a ete définie dans &: 5
et que de méme, laction de J, a été définie dans a2. On vérifie alors
immédiatement que :
-31-
(i) J, et 5, sont encore des opérateurs de moment cinétique
lorsqu'ils sont considérés comme des opérateurs (prolongés) agissant
dans &.
(ii) Topérateur
T-U+h (S*=b)
est également un opérateur de monent cinétique. Nous 1'appellerons
“moment cintétique total".
1 - Position du probléme
Nous pouvons définir des groupes G et Ge d'operateurs de
rotation agissant respectivement dans £1 ou & ou, par prolongement,
dans & :
(Zi) = exp | -
Gino lit @ |e2dam> (67-4)
ol <1, tz» dis Jo Sont fixés tandis que chacun des indices m, et my a
(25, + 1) et (252 + 1) valeurs possibles.
&(x1t2 + Judz) est invariant sous I'action de toute fonction
we -de J, et Jz, en particulier sous celle du moment cinétique total J-3,+ Jp.
En d'autres termes, cet espace est invariant sous l'action des opérateurs
deGu, @, et de Gis Gp. A Vinterieur de &(tit2 3 jijo)> Topérateur
T (ay. 3p) a pour éléments de matrice =
pli del, hy =
mms 3
aa
et HAS dyin fh, Ta/t yy gt aaa
qui engendre &(tyx2 3 jyJq) peut
étre obtenu 4 partir d'un autre ket quelconque de la méme base par actions
répétées de J, , et de Jz ,. De facon générale, tout ket |v, 45,5, >
de &(ryt2 3 J,J2) peut donner |r,t2 5 51525,52> par action des opérateurs
J, 4 et Jp, a une certaine puissance, puis par action répétée de J) _
et Jo _ un ket quelconque de base. Donc, &(1,t2 3 JiJ2) n'a pas de sous-
espace invariant sous ‘action du groupe produit tensoriel dont les éléments
sont donnés en (85-c).
Revenons maintenant au groupe . I1 est clair que ce groupe,
sous-groupe de G, © G , est du méme type que Gy et Gr eux-ménes ; ses
éléments dépendent aussi de 3 paramétres réels et peuvent étre engendrés &
partir d'un opérateur de moment cinétique J. L'ensenble GQ est donc un groupe
dtopérateurs de rotation auquel tous les raisonnements du § B précédent sont
applicables. Comme pour @ = 4. , les matrices T fournissent une représen-
tation [ i] suffit de faire 3, = 3, = 3 dans (**) } que nous appellerons
“représentation produit. Le probléme qui nous intéresse ici est de savoir
si cette représentation est réductible ou non (#) ; dans l'affirmative, nous
désirons décomposer &(t, t2 ji j2) en sous-espaces irréductibles. En d'autres
termes, nous voulons effectuer sur la représentation de (les ménes opérations
qu'au § B-3 et 4 précédents.
(2) Diagonaliser par blocs les matrices de Q n'implique pas nécessaivenent
Ja mime diagonalization pour zoutes les matrices deG, o @) , cone %
est un eous-ensemble. Done, la représentation peut étve réductible
vis-a-vis de 3g sans l'étre vis-d-vis deGr eG :
- 34
Si l'on peut réduire la représentation produit, c'est qu'il
existe une autre base de &(1,2 3 jij) od :
Wi,
Ve,
is?)
(QA) = Ryle) =
oO
ww
ele)
Brae
Brits due) = 8 er 9) (63-0)
td
{nous simplifions 1a notation &t,t2 3 t J), qui serait plus compléte,
en &x, J)I-
Nous allons voir qu'une telle décomposition est effectivement
possible. Le probléme sera alors de déterminer quelles sont les représenta~
tions qui apparaissent (caractérisées par les valeurs de J), de savoir
combien de fois chaque valeur de J apparait, comment faire le changement
de base, etc...
2 - Réduction de la représentation produit
Comme nous avons déja fait a plusieurs reprises, nous pas-
serons rapidement sur les démonstrations de ce paragraphe, qui figurent dans
Jes cours de mécanique quantique élémentaire [voir par exemple, la référence
(33), chapitre xX, § Cl.
a) Valeurs propres de J? e
ele
1] apparait dés I‘abord que 1a représentation produit est en
général réductible. En effet, si elle ne 1'était pas, on aurait une seule
valeur de J possible telle que 20 + 1 = (2j; + 1) (2i2 + 1) et chaque
valeur propre Mi de l'opérateur :
J, = di, + 2, (7-2)
serait réalisée une fois et une seule (entre +) et -J). Or, (sauf si ou
Jy ou j est nul), on peut trouver des combinaisons différentes de m
et m, conduisant 4 1a méme sonme :
Mz m+ m (70-b)
Le méme raisonnement donne facilenent les valeurs de J possibles.
‘A toute représentation irréductible dans &(x, J) est associée une fois et
une seule toute valeur de M égale 2d, J- 1,9 - 2, ---5 ~J. Done, la
valeur J = 5; + dz est réalisée, et une seule fois : ceci provient de
5, + ip. Pour la
J'existence d'un ket et d'un seul, tel que M =m + m2
valeur M = jy + jg - 1s elle est dégénérée deux fois (m = Ji - 1s
mp = J OU m = Jy, M2 = Jo ~ W. La valeur maximale de J = 51 + Je
donnant lieu a un ket 02 M = J + jp - 1, il existe nécessairement la
valeur J = j; + jp - 1. Le raisonnement se poursuit de méme et on obtient
Je résultat bien connu ; les valeurs possibles pour J sont :
(ath
hi+d2-1
”
Chaque valeur de J n*étant réalisée qu'une seule fois, I'indice x est en
fait inutile (#). On vérifie que 1a somme des dimensions des espaces
&(3) est bien égale & celle de I'espace de départ =
(20 #3) = (2, #1) (in +0) (2)
VW5i - Jel
Nous voyons donc que J*et J, fornent un £.C.0.C. (**) dans
8(x4tq 3 Jyd2)- Nous avions déja Itensenble des deux opérateurs Jy, et 9:
(2) IL se trows que, dans le cas du groupe des opérateurs dé rotation, Ja
dScomposition d'une reprgsentation produit tensoriel de représentatton
irréductible ne fait jamais apparatere plus d'une jois chaque vépré
tation irréductidle. Ce n'est pas toujours le cas pour un groupe quelconque
(8) Un £.C.0.C. est w: "ensemble complet d'observables qui commtont"
(voir par exemple, la référence (13), § D-3-1
or
Comment passer de 1a base [xit2 3 JiJzmma> associée au second £.C.0.C.
(a partir de maintenant, nous noterons Jes kets |J,Jjomm>, ignorant des
indices qui sont devenus inutiles) @ la “base couplée" des kets |J, M>
associée au premier ?
Le raisonnement effectué plus haut montre qu'on peut poser =
Jo = Sy + doe Moja fer = Wine doom = day me = So?
(73)
Par action de :
a = dL tds
on construit ensuite tous les autres kets :
JO = jit doe
de 1a méme "famille" repérée par la valeur j; + jo de J. On obtient ainsi
les 25, + 232 + 1 premiers kets de 1a nouvelle base qui donne £(9 = jiti2)-
On raisonne ensuite dans le supplémentaire de ce sous-espace,
ou la valeur propre M= J; + Jp ~ 1 est réalisée une seule fois (non dégé-
nérée), au lieu de deux fois dans I'espace initial. Le raisonnement est
alors exactement le méme, le seul probléme qui se pose étant celui du choix
de 1a phase d'un des kets de base (I'action de J, fixant ensuite celle des
autres). Par convention, on pose :
reel > 0 74)
11 est clair que le raisonnement est récurrent ; de cette fagon, on obtient
tous les kets |J, M> -
Pour résumer les résultats obtenus, nous avons obtenu da
decomposition (8%-b) du sous-espace &(t;t2 3 jij) sous 1a forme
iy + do
8(ryt; $ dads) = > 2(9) (78a)
J= Ti - del
ea
Chaque &(J) est engendré par les 20 + 1 kets |J, M> de Ta base standard
associés a 1a valeur correspondante de Jet 2M=J,I-1,9-2, .--
Le fait que l'indice 1 de (%-b) est inutile tient au fait que, dans la
décomposition de 1a représentation produit tensoriel (®7-c ), il se trouve
que chaque valeur de J permise apparait une seule fois. De facon symbol ique,
rae
on peut écrire :
jit ie
(ald) 9 (ghd) aa (ai)
d= Th - del (78-b)
@
En ce qui concerne les kets |J, M> de la “base couplée",
leurs relations de transformations sont plus simples que celles de 1a
“pase découplée" |+,5,m, 3 t2j2m,> . En effet, les relations (6®) donnent,
lorsque 3) = a = a:
R(B) Ieae due M5 tae dav mr
ea Cilig Ciel
= aR (8) Vays ym, OR (a) Yatome
Teas das m'y 5 tos dos m'a> (76-a)
alors que, pour 1a base couplée, une seule matrice (R) suffit a effectuer
Ja rotation :
ROR) Joy = Be CREME) yay fon (78-b)
ae
b) Coefficients de Clebsch-Gordan
Les coefficients de Clebsch-Gordan sont, par définition, les
produits scalaires :
Ce sont les { (25, + 1) (252 + 1)12 coefficients d'une matrice unitaire
de changement de base (1a matrice est en fait réelle et donc orthogonale)
(i) Par construction, ces coefficients sont totalement indé-
pendants de la nature du systéme physique considéré, ainsi que der, et t2 :
ils traduisent des propriétés des groupes G de rotation.
- 38 -
(ii) Ils sont réels =
=< MS .5ammy> (77)
(cette propriété vient de ce que les coefficients qui apparaissent par
action de J,, J, sont réels).
(iti) Régles de sélection :
ne peut étre non-nul que si :
Mem, +m
lj: + dol 29 > ir - dal (régle du triangle, cf fig. VI-6)
. dest entier si jj et Jp sont tous deux, soit entiers, soit
demi-entiers.
_ J est demi-entier si un des deux nombres quantiques
(seulement) est demi-entier.
—
os
[*
/
q
(iv) Relations d'orthogonalité :
Le fait que les deux bases {|J, M>} et {|j,Jommg>} de
@(1yt2 3 Jydz) soient orthonormées entraine que :
> = Sy. Sys
m +m =
ue (78-a)
et: eee ee
= Saint, Smam' y
(78-0)
YA, 292 |-Vel
Poe
(v) Lien avec les matrices de rotation. On a :
cats (fd ye
‘mim! y ‘mgm! 2
deits 3
ae (RE age
Je Th al ™
(79-a)
et, inversement :
Bag yyy = LL Se Aidammteld te Sydow! yaa 0H
mm, Mom >
(RES y (eWay
mm" mam'2
(73-b)
Exercices :
(i) Calculer 1'2lément de matrice =
7 -ig Tim se
en introduisant des matrices de rotation et utilisant le fait que
J= J, +I, . Developer d'autre part les kets |J,Jamm> et Jaydam' ym" 9>
sur la base |J, M> et démontrer 1a formule (79-a).
Pour démontrer la formule (78-b) , partir de :
sur la base |j,J2mmp> .
(ii) Calculer explicitement les coefficients de Clebsch-Gordan
Remarque =
on montre (voir par exemple, référence (13), complément B,)
que :
réel > 0 (80-a)
edad ymamy|, Mo = (151 #92 7 9 jy jgmm,|d >
ejydormeme|d, “Mo = (191 1 327 9 cig Sgmm,|d
et les relations de récurrence :
YF TY = MOTE T)
(89-6)
De ces relations, on déduit que :
= (-1)9 7 "QeT (80-c)
Cette derni@re égalité, qui donne les coefficients correspondants a un
moment cinétique J = 0 (avec 3, = Jp = J)s nous sera utile au § suivant.
Exercice :
Démontrer les relations (80-b) et (8°-c).
Remarque :
On peut appliquer plusieurs fois les raisonnements de ce § C
et composer 3, 4, moments cinétiques ; voir le § B-3 du chapitre VI
du polycopié (coefficients 3j et 6j de Wigner)
D - TRANSFORMATION DES OBSERVABLES
Une observable B est un opérateur hermitique & spectre complet
(tout vecteur |y> peut étre décomposé sur les. vecteurs propres de 8). Nous
avons déja introduit en (37-b) Iopérateur k', transformé d'un opérateur
K(&) par lopération unitaire R(&). Pour une observable B quelconque, nous
poserons
Bt = (8) B RECA) (81-a)
est également hermitique, puisque :
(yt = prt(aytet Rta) = 8 (81-b)
D'autre part, si le paramétre d est infinitésimal (rotation R infinite
simale), on obtient
i
8 (1 = fb ad.3) 8 (1 + fb od.3) + (402)
B - (d3.3, 8) + (da)
a - fae (a, 81 + O(de?) (1c)
aie
Ctest donc le commutateur de B avec une composante de J qui apparait dans
ce cas.
Composons successivement deux transformations unitaires
(finies ou infinitésimales) R(3) et R(B) ; i1 vient :
R(B) Bt RE(B)
8
R(b) R(d) B RECS) E(B) (82-a)
Done, si l'on introduit 1'opérateur produit :
R(@) = R(B) R(a) (82-b)
On peut écrire :
Bt = R(2)B RIE) (8)
C'est donc bien l'opérateur produit R(@) qui donne le produit successif
des deux transformations.
1 - Opérateurs de
Ltensemble des opérateurs B constitue une espace vectoriel(*)
&, de dimension N? si l'espace & lui-méme est de dimension finie N. Par
exemple, si & est I'espace des états d'un spin 1/2, tout opérateur B
agissant dans & peut s'ecrire :
B= adttBo ty oy + So, (8)
tation dans l'espace des observables
(00 0, » cy et a, sont Tes matrices de Pauli) ; c'est done une combinaison
Jinéaire de 4 opérateurs indépendants, qui engendrent 1'espace S’.
De facon plus générale, si lu,>) désigne une base orthonormée
dans &, ona :
Tus (8c)
Les by, apparaissent ainsi comme les conposantes de 8 sur 1a “base d'opé-
rateurs" Q,,+ engendrant I'espace %.
Lorsque B sera considéré comme un vecteur de S, nous 1*écrirons :
Bee & (88-2)
Ja double notation ket étant destinée a rappeler qu'il s‘agit en fait
d'opérateurs agissant dans &.
Dans %, on peut définir l'action d'opérateurs linéaires c
[s' » = € je» (86-b)
Par exemple, si 8' est donné par (8!-a), on définit ainsi “I'opérateur de
rotation"
Ra] a> = [Bt >
= | R(8) BREA) » (87-a)
Lorsque & est infinitésimal, on obtient la rotation infinitésimale dont
l'effet, d'aprés (8!-c), est donné par :
a
R(da)| B> = [B» - FI] (da.S, Bl> (87-b)
que nous pouvons encore écrire :
R (a8)| 8 > = a
raj) |B» (87-c)
en définisant I'action de J par (pour simplifier, nous abandonnons 1a
notation ® pour '}) :
a.) [B> = [[d3.3, 8) > (87-d)
ou encore :
yy lB = [bya > (87-e)
Cette définition fait de '] un opérateur de moment cinétique.
En effet :
ib,. (ys ay] »
iby. ys 5] > (88-a)
Ye Wy FB
Dy de 18 >
- 43 --
mais 1'identité de Jacobi donne :
a (dys ai] + Ly. (8, ail +f (yy, oa] =0
(88-b)
de sorte que :
ye yy bee = tlhe, ay. a) >
= inf a, 8 >
= in ye |B > (88-c)
8 étant quelconque, nous obtenons par permutation circulaire des axes
les relations de commutation standard :
Che? 4x Fe ‘Ix, (°)
Nous pouvons donc transposer 4 % tous les raisonnements faits précédenment
dans &. Nous allons en particulier introduire des sous-espaces irréductibles
K(x, Kk) qui sont l'analogue des &(+, j) ; en principe, K peut étre entier
ou demi-entier, mais seul le premier cas nous intéresse en pratique. Les
valeurs K = 0 et K = 1 nous conduiront 4 1'un de ces opérateurs scalaires
et vectoriels respectivement ; nous envisagerons ensuite des valeurs plus
Glevées de K (opérateurs tensoriels irréductibles).
2 - Opérateurs scalaires et vectoriels
a - Opérateurs scalaires (K = 0
Lorsque K = 0, un sous-espace s(t, K) n'a qu'une dimension.
L'opérateur B correspondant au"ket" unique qui lengendre, est invariant
dans toute rotation :
B R(a) B RY(a) Va (20-a)
ou encore (rotations infinitésimales) :
(3,8) = 0 (2b)
On montre facilement que les deux relations (2°) sont équivalentes ; un
opérateur B les satisfaisant est dit “opérateur scalaire”.
b - Opérateurs vectoriels (K = 1)
Lorsque K = 1, le sous-espace O¥(1, K) posséde 3 dimensions ;
- 44 -
Nous avons donc 3 opérateurs qui se transforment linéairement Tes uns dans
les autres par rotation.
Un exemple en est J lui-méme, puisque nous avons montré en
(4°) que =
(Bd) (91-a)
R(a) (B. R* (a)
avec :
B= Qayb (22-b)
Ces relations montrent bien que toute combinaison linéaire des composantes
de J est transformée en une autre combinaison linéaire du méme type sous
Veffet de Iopérateur R(4) {aucune direction B ne restant invariante
dans toute rotation, le sous-espace d‘opérateurs correspondant est bien
irréductible] .
(i) Définition
De fagon générale, nous prendrons les relations (°1) comme
définition générale d'un opérateur vectoriel V , en écrivant :
R(a) (8. ety) = BY (lc)
B' étant toujours donné par (9!-b). Nous vérifierons plus bas que cette
définition est bien équivalente a imposer que les composantes de V engendrent
un sous-espace irréductible S¥(r, K = 1). Si l'on développe (93-b) suivant =
bye Fa) yi
x
i
il vient, par identification des termes en b, dans (St-c) :
i
R(a) vy RB) = GRE)
a J
55 (91-4)
qui peut constituer une définition équivalente d'un opérateur vectoriel Vv.
D'autres définitions, toujours équivalentes, sont données par :
“14
/ [x
KO) vy
J Nl ere)
clest-a-dire, si V* symbolise l'ensemble des 3 opérateurs V,' , V/' et V," =
We RO)T T= Ryle Ve (hf)
Remarque : La matrice (G¥) permet également de passer de
en transposant (?!-e), i) vient : (V,' Wy' V2") = (Vy Vy VG
| 11 faut prendre garde dans ce type de calculs, a ne pas intervertir ® et
Se". La situation est schématisée sur la figure, ol tout operateur 5.¥
est défini comme une combinaison linéaire
de Vy + Vy + V, (axes de Ta figure). La
definition (?!=c) montre que l'effet d'une
V revient simple-
rotation de l‘opérateur b
Vg ment sur cette figure & effectuer une rota-
tion ordinaire de 6 (la figure est faite
dans le cas particulier of Oz est l'axe de
rotation).
Ya Par définition, le “vecteur" ¥' symbolyse l'ensemble des 3
| opérateurs V' = 8.0, Vi = 8.Uetv,' = é, Vy ote nay. yt
Le produit scalaire ne dependant que de la position relative des vecteurs
on a également V/ = (Ro e Pao Y= 8. ‘) Let des relations
ay
a composantes y et 2], ce qui conduit a écrire V"
comme en (9!-f).
(ii) Rotations infinitésimales
Sous l'effet d'un opérateur de rotation infinitésimale
R(da) = R (ids),
ve (l= det
devient V' donne par
=V-dpuxd (82a)
Comparant a la formule générale (S!-c), nous obtenons 1a condition pour
que V soit vectoriel sous la forme :
ta ,Vps - ind (
Par linéarité, on peut encore obtenir 1a définition équivalente
(3.0), (HH) 1 = in (Gx wT (22-c)
Une derniére facon de définir un opérateur vectoriel ¥ est
d'expliciter les composantes de cette égalité, ce qui donne :
(ae Vd = 0
Foe Wl = iy,
Lays vei = cit yy
- 46 -
(& ces trois relations, on ajoute les 6 autres obtenues par permutation
circulaire des indices x, y et z).
(iii) Composantes standard
Pour verifier que Tes 3 composantes de V engendrent bien un
sous-espace irréductible Si(r, K = 1), nous devons trouver une “base
standard", constituée de conbinaisons linéaires indépendantes de V,, V,
et V,. se transformant par rotation Tes unes dans Tes autres suivant Tes
natrices(R'S * 1). Mais, nous avons déja renarqué en (6%) que :
- -1
Ce Oe
j= My gl
(= (8) (RE) sh
od 1a matrice ($) est donnée par (62-a), (4 partir de maintenant, nous
sous-entendons les notations i et »). Nous voyons donc que, par un change-
ment de base dans 1'espace des composantes de ¥, les rotations seront
décrites par les matrices (R!9 = 1), au lieu des matrices (S). La
définition que nous avons prise d'un opérateur vectoriel correspond bien
a celle d'un espace 2(r, K = 1).
Effectuons explicitement ce changement de base ; ce calcul
nous sera utile pour la suite. Si les composantes V,, Vy, V, se tranforment
par rotation suivant les matrices (SU) [relation (91-g)] les opérateurs
Vyqe Vo et Vy définis par:
(yy Yo Vey) = MY YYZ) (8) (2-a)
se transformeront suivant tes (R'I = 4), puisque :
(Vea VouaYa re) R(V,, Vo Vy) at
: +
= RU Vy Vp) BE CS)
BW Vy MA) (8)
= YY) DS)
<1
= (Vy, Vy Veg) (S72) (5)
(33-6)
ce qui donne d'apras (63-a) =
nea =1
Wyy" Vo! Ven!) = Van Yo Van (FE 4D (33-¢)
-47 -
Les composantes V,, Vp et V_j de V sont appelées “composantes
standard" de l'opérateur vectoriel V. Explicitons (22-a) ; nous obtenons
[relation (62-a)} :
1 <
Ve oT Ou, tiv
UW. - iv (2a)
Ces composantes sont également notées V,, avec m= +1, 0, -1.
Pour la relation (7*-c), elle s‘écrit :
Neem Yas (8)
ope 2
mn a
(nous sous-entendrons a partir de maintenant, les paramétres U et ¢), qui
est T'analogue de :
Riizlm> = iE (RSM) ge a, mt >
Rappelons 1a définition (53-a) des (REI = MN)
(RD) ay =< dem lexp -fo, li, m>
On congoit donc 1'intérét d'introduire des composantes standard V,, : elles
nous permettent d'appliquer sans changement 1a théorie du moment cinétique
et de 1a base standard du chapitre précédent.
Remarque :
On peut noter 1‘analogie entre la formule (62-b) de définition
d'une nouvelle base (complexe) dans l'espace habituel et la définition
(23-a) des composantes standard. I1 faut cependant prendre garde au fait
que :
(98=c)
- 48 -
3 - Généralisation : opérateurs tensoriels irréductibles
a) Définition, relations fondamentales
Par définition, un “opérateur tensoriel irréductible"
(8)
est un ensemble de (2K +1) opérateurs, appelés “composantes standard",
qui se transforment par rotation suivant la matrice (rfF =). nous
noterons ue) ces composantes, avec =
Q = K, Kel, K-2, -.. K+ 1, 71
Le nombre K est appelé ordre de 1'opérateur irréductible. L'opérateur
correspond au “double ket"
|r, Ke Q > analogue de |x, J K,m=Q>
8)
et les (2K +1) composantes de 1%) fournissent done une base standard
dans un sous-espace irréductible Q(t, K).
Les relations générales (28) s'écrivent ici (a partir de
maintenant, nous abandonnons 1‘ indice + pour alléger les notations) +
(ye ede =O IK 0
} . (38+)
ye =n A(KF TY ~ T= Ty [k, Qe
qui sont équivalentes a [relation (87-e)]:
{> rH = ro)
t ta, TO) =n REET TE TY hl (25-0)
Pour des rotations finies, 1'égalité (53-b) donne ici :
(98-c)
L’une quelconque des relations (5) peut étre prise comme définition des
(K)
composantes d'un opérateur tensoriel irréductible T!™'.
b) Produit de deux opérateurs tensoriels irrédu
Considérons deux opérateurs tensoriels irréductibles, 1'opé-
rateur TCS.) d'ordre K, et Topérateur W{K2) d'ordre Kp. Nous ellons nous
- 49 -
intéresser aux produits de leurs composantes :
(Kx) (Ke)
Ta a “sash
wKe < Q2 < Ke (98-a)
on obtient ainsi un ensenble de (2K,+1) (2Kg+1) opérateurs se transformant
linéairement les uns dans les autres par rotation. En d'autres termes, on
a un espace vectoriel d'opérateurs, de dimension (2K,+1) (ZKj+1), invariant
par rotation. Nous allons voir que cet espace n'est en général pas irré-
ductible et peut étre décomposé en sous-espaces invariants de dimension
inférieure. En effet : ane an
n 6) wt) at R io) at rR v&2) ci
= Tg, gg, MO MOD
0'10'2 an
Les opérateurs écrits en (26-a) se transforment done par rotation comme
des produits tensoriels de kets [J=K,, MQ, > @ [U=Kp, M=Q2 > [ relation
(78-a)]. Nous sommes donc ramenés au probléme de 1a composition des moments
cinétiques. En conséquence, nous pouvons affirmer que les opérateurs uw
definis par :
(yl Fo. > WK) y(Ko)
20) = quatong < Ki Ke Gr Qalk Q> THQ)? whos
K = Ky + Koy Ky + Ky - dy coos [Kr - Kel
Q= Ky Kl, - eased
(37-2)
se transforment par rotation de facon plus simple, comme les kets de la
base couplée |J=K, M=Q > { relation (76-b)]. On a donc
(kK) gto ol (Kh) (K)
RZ R v CR arg a (97-b)
et les 2K+1 opérateurs 2) associés 4 une méme valeur de K donnent un
opérateur tensoriel irréductible.
Inversement, les produits (26a) s*expriment en fonction des
nouveaux opérateurs sous 1a forme :
rE) y(K) 2 fe Ky ke Qe IK Q> ZK) (97-¢)
a QW K,Q Q
On voit donc apparaitre une somme d'opérateurs tensoriels irréductibles
dont lordre va de |K,-K2| & Kz + Ky.
0
Les égalités (27) permettent de simplifier bien des calculs lorsque kK; et
ke sont quelconques. En particulier, on voit que, pour obtenir par produit
un opérateur scalaire, i1 faut toujours partir de deux opérateurs tenso-
riels irréductibles du méme ordre. On utilise alors (°°-c) pour écrire le
produit scalaire de deux opérateurs TK) eg 2(K)
CK) (Ks 21y0 76K) y GK)
i pee hg Wa) oo)
a
[La suppression du (-1)* (2k+1)""/? de (20-c) assure que, si k = 1, on
retrouve le produit scalaire ordinaire de deux vecteurs cf. (MO).
c) Hermiticité
Lopérateur T'*) est dit hermitique si
(Kt 2 cay? 1h)
ea oo ()
+
Par exemple, si V est hermitique (V, wee), ona?
mall
ve
(> YY)
Ly + fy)
we
et on verifie bien (2°). Une justification plus générale de la relation (°°)
peut tre donnée si I'on introduit les conposantes cartésiennes du tenseur
18) (ef, chapitre VII, § 8 du polycopié}, auxquelles on impose I'hermiticité.
Prenons deux opérateurs vectoriels (K = 1) notés Vet Wi, et
construisons par produit d'autres opérateurs tensoriels. Les relations (°°)
nous donnent :
\2,2>= jiiii>
,ie2 Lpiio>+tpri01>
ve
|2,0>= Lpri-as+tti00>+tpi-arr>
& e 6
\2, -1>= Lyi0-1>+4+ii-10>
res ve
\2, -2 > fl.-1-1>
|, -1 >
Jo, o>
-51-
fiito>-+Lfi01>
2
fia-r>-Ljri-1i>
v2
firo-1>-4 ii-10>
oem
fio0o0>++}ii-1i>
%
JlLai-t>-
(200)
égalités qui nous permettent de construire 3 tenseurs, K = 2, l et 0.
@k-0
Nous obter
(K20)
T(Qeo) *
Ltopérateur scalaire (
simplement. proportion:
nons :
LE Vy MM tM My)
3 +1 1 0-0 -1 "+1
1
el et Wy My HD
ly
-Lea (201)
5
invariant par rotation) que nous obtenons est donc
e] au produit scalaire V.W.
eras 5 oa VW HV
Maton) = 2 Me VM, +4 (WyW-VNy I
1 al
3 (yay = Valen) = = WB = Waly 1
1 el “VW 7
FVM yVigy) = oO Va U Ha TV My VME) I
we
(202-a)
On reconnaTt alors les composantes de 1'opérateur :
R-VxW (192-b)
et on voit que :
(k=
ei
i
ye Ke
~ 52 -
(Kel
ket)
(Kel) _
KD) (202-¢)
En d'autres termes :
(Kel) 1 axW (102-4)
Les relations de commutation de cet opérateur avec le moment cinétique
total J sont celles d'un opérateur vectoriel.
GD k=2
(2).
Me = Mar Me
(2) eel
My tae Ma Mo * Mo Mea)
(2). 1 +
To = ge Ma Bat Mo Vay Ma
(2) 1
Ty ae Mo 1 Mo)
(2).
Peel (293-a)
L'expression de T{2) peut etre mise sous la forme :
°
(2) 2 1 - va 03.)
sal OM, WW VW) (203-b)
Remarque :
On peut de méme, multiplier successivement 3, 4, ... opérateurs
vectoriels, et obtenir des valeurs de K de plus en plus élevées. Le tableau
suivant résume la situation :
valeurs de K
ook
Nous voyons apparaitre des représentations irréductibles du
groupe des rotations allant jusqu'a la valeur maximale J = n (valeurs
entourées sur le tableau). On remarque que cette valeur maximale n'est
obtenue qu'une seule fois (un seul schéma de couplage), contrairement aux
autres valeurs.
E - THEOREME DE WIGNER-ECKART
Le théoréme de Wigner-Eckart donne une relation trés utile
concernant 1'élément de matrice (*) :
aa ae [TO Som
d'un opérateur tensoriel irréductible 1{§) dans une base standard. Nous
allons voir que cet 6lénent de matrice est proportionne! au coefficient
de Clebsch-Gordan
< JM Jot KM Q>
avec un coefficient de proportionnalité indépendant de M, M et Q. Dans
les calculs de mécanique quantique of 1'on utilise une base standard
(ce qui est fréquenment le cas), ceci entraine une notable simplification :
on peut dire de facon résumée que, quand on connait un élément de matrice,
on en connait, gréce au théoréme de Wigner-Eckart, un grand nonbre d'autres.
La présence du coefficient de Clebsch-Gordan entraine ]'existence de régles
de sélection : par exemple, on doit avoir M = Q +M" pour que ce coefficient
soit non-nul ; 1a nullité de tous les éléments de matrice ne satisfaisant
pas cette égalité en découle immédiatement, sans aucun calcul.
Avant de donner une démonstration précise du théoréme, donnons~
en 1a ligne générale. Nous conmencerons par remarquer que, lors d'une
rotation, le ket =
k) '
TD) Ley at Mt >
q |
devient :
rT(K) gt op ct, ot, Mh >
Q
bans cette expression, R T'K) a est connu (transformation
d‘un opérateur tensoriel irréductible), ainsi que R |r‘, J‘, M' > (trans-
formation des kets d'une base standard). Par suite, par un raisonnement
analogue & celui que nous avons déja effectué (au § D-3-b par exemple),
(@) Nous effectuons ici un tras Léger changement de notations, éerivant
J et M (nombres quantiques du moment einétique total du systéme)
au lieu de j et m.
‘on voit que 1a transformation des kets Oe J', Mt > se fait come
celle de produits tensoriels [J = K,H=Q>e [v's NM >. Ceci nous
conduira & coupler J* et R pour former Jn «4K, et faire apparaitre
des états [k, 0 = J", N > grace aux coefficients de Clebsch-Gordan
11 ne nous restera alors plus qu'a effectuer un
produit scalaire par < x, J, MI . On stattend a ce qu'il soit nul (comme
pour une base standard) sauf si J = J", M = M" 5 ces @galites, reportées
dans le coefficient < J' KM’ Q jg" M" >, donnent bien le coefficient
annoncé.
précisons maintenant le raisonnement qui vient d'étre ébauché.
Nous allons procéder en deux étapes. En premier lieu, nous établirons un
Jenne concernant le produit scalaire 5 puis nous
démontrerons le théoréme lui-méme.
a) Lenme
Considérons deux ensembles, de 2d+1 et 2J+1 vecteurs :
In. 3, M> Medd. 7d
ke os NS Wed", dMely eed"
Par hypothése, ces kets satisfont aux propriétés d'une base standard (*) =
ltaction de J,, J_, J,, et donc de toute composante dy de J, est donnée
par les relations (28). Dans ces conditions, nous allons montrer que
Je produit scataire < ty J, Mik, J", MY >
© est nul sauf si J = J" et M=M
© est indépendant de M (et M")
La démonstration de ce lemme est trés simple :
« deux kets propres de J?, ou de J, (qui sont des opérateurs
hermitiques) sont orthogonaux s'ils sont associés 4 des valeurs propres
différentes.
fférentes |t, ¢, > et |k, J", MY > sont urtlisées
(©) Les notations
pou" inetecer sur Le fait que cos Kets n'appartioment pas nécossai—
reine 2 une mone base standard (La déeonposttion de |k, J", M" ~
gun tes |t, J, N> pout faire interventr plustewra valeurs de *)-
Vous aimerez peut-être aussi
- Chimie Générale (PDFDrive)Document511 pagesChimie Générale (PDFDrive)SimplicePas encore d'évaluation
- Exam Jan20 Phys102 CorrigeDocument13 pagesExam Jan20 Phys102 CorrigeSimplicePas encore d'évaluation
- 1ere Annee 2012 2013 CompressDocument8 pages1ere Annee 2012 2013 CompressSimplicePas encore d'évaluation
- Dokumen - Tips l1 s1 2017 2018 Phys 102 Physique Experimentale OptiquehebergementDocument188 pagesDokumen - Tips l1 s1 2017 2018 Phys 102 Physique Experimentale OptiquehebergementSimplicePas encore d'évaluation
- CC 14dec2015 Sujet Correction BaremeDocument12 pagesCC 14dec2015 Sujet Correction BaremeSimplicePas encore d'évaluation
- ManuelTracker 2020Document28 pagesManuelTracker 2020SimplicePas encore d'évaluation
- Cours PFDDocument16 pagesCours PFDSimplicePas encore d'évaluation
- Stra Paleo Bcgs3 CoursDocument89 pagesStra Paleo Bcgs3 CoursSimplicePas encore d'évaluation
- Recueil Careme - Paques 2013Document16 pagesRecueil Careme - Paques 2013SimplicePas encore d'évaluation
- These 25112011Document163 pagesThese 25112011SimplicePas encore d'évaluation
- 31718Document496 pages31718SimplicePas encore d'évaluation
- FourierDocument48 pagesFourierSimplicePas encore d'évaluation
- Probleme III LuraniumDocument12 pagesProbleme III LuraniumSimplicePas encore d'évaluation
- Outils Calcul Scientifique Ch4 Transformation de Laplace21-5-12Document12 pagesOutils Calcul Scientifique Ch4 Transformation de Laplace21-5-12SimplicePas encore d'évaluation
- Billion 06801300 Detournay 53371400 2019Document78 pagesBillion 06801300 Detournay 53371400 2019SimplicePas encore d'évaluation
- CorrigéDocument4 pagesCorrigéSimplicePas encore d'évaluation
- PHQ330 MqiiDocument165 pagesPHQ330 MqiiSimplicePas encore d'évaluation
- Transformee de FourierDocument18 pagesTransformee de FourierSimplicePas encore d'évaluation
- Chap SerieFourierDocument25 pagesChap SerieFourierSimplicePas encore d'évaluation
- MQ1 Part1Document79 pagesMQ1 Part1SimplicePas encore d'évaluation
- TD #04 Espace Des États Et Notation de DiracDocument8 pagesTD #04 Espace Des États Et Notation de DiracSimplicePas encore d'évaluation
- FourierDocument14 pagesFourierSimplicePas encore d'évaluation
- Physique Quantique: Université Paris-SaclayDocument96 pagesPhysique Quantique: Université Paris-SaclaySimplicePas encore d'évaluation
- Lp206 Chap ViiDocument16 pagesLp206 Chap ViiSimplicePas encore d'évaluation
- EXAMEN 2010 Texte CorrigeDocument21 pagesEXAMEN 2010 Texte CorrigeSimplice100% (1)
- Guide RéparationDocument30 pagesGuide RéparationSimplicePas encore d'évaluation
- TD Correction Derniers ExosDocument15 pagesTD Correction Derniers ExosSimplicePas encore d'évaluation
- Transformee de FourierDocument35 pagesTransformee de FourierSimplicePas encore d'évaluation
- TD6 Transfo Fourier2019 20Document2 pagesTD6 Transfo Fourier2019 20SimplicePas encore d'évaluation
- fh056 01Document5 pagesfh056 01SimplicePas encore d'évaluation