
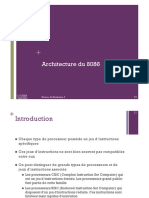
Chapitre Microprocessuer 8086
Chapitre Microprocessuer 8086
Vous aimerez peut-être aussi
- 6809 EnsaDocument15 pages6809 EnsaAchraf Rossoneri75% (12)
- Chapitre3 ProfDocument21 pagesChapitre3 ProfFedi AffesPas encore d'évaluation
- CH 2Document45 pagesCH 2raghda amamiPas encore d'évaluation
- Note de Cours Chap 3 Et 4 - 2Document42 pagesNote de Cours Chap 3 Et 4 - 2Амр ХашмиPas encore d'évaluation
- Chapitre 3Document47 pagesChapitre 3Anwer BaccarPas encore d'évaluation
- Cours No 04 Etude de L'architecture Du Microprocesseur 8086Document6 pagesCours No 04 Etude de L'architecture Du Microprocesseur 8086Wassim AmamichePas encore d'évaluation
- Etude de L'architecture Du Microprocesseur 8086.: Chapitre N 04Document6 pagesEtude de L'architecture Du Microprocesseur 8086.: Chapitre N 04Zakaria ToualbiaPas encore d'évaluation
- 5cpu 8086Document9 pages5cpu 8086Ben Aissa OussamaPas encore d'évaluation
- Module 1 - 8086Document19 pagesModule 1 - 8086Hiba TounePas encore d'évaluation
- Le Microprocesseur 8086Document22 pagesLe Microprocesseur 8086Merbai YassinePas encore d'évaluation
- 04 Microprocesseur 8086Document18 pages04 Microprocesseur 8086nesrine ninaPas encore d'évaluation
- Microprocess EurDocument12 pagesMicroprocess Eurmabroukoussema61Pas encore d'évaluation
- 3 MemoireDocument6 pages3 MemoirekaifallahghitaPas encore d'évaluation
- Cours Assembleur IIDocument25 pagesCours Assembleur IImhaouch AyoubPas encore d'évaluation
- Cours ArchOrdi Chap2Document26 pagesCours ArchOrdi Chap2Houda SenoussiPas encore d'évaluation
- Chapitre IV Le Microprocesseur Intel 8086Document12 pagesChapitre IV Le Microprocesseur Intel 8086Aziz BechPas encore d'évaluation
- Microprocesseur 8086Document79 pagesMicroprocesseur 8086Hichem Hamdi100% (3)
- Chapitre 3Document49 pagesChapitre 3Hamza BeninePas encore d'évaluation
- A-Préliminaires B - Présentation de CPU 8086 C - Registres de CPU 8086 Icroprocesseur (CPU) 8086Document34 pagesA-Préliminaires B - Présentation de CPU 8086 C - Registres de CPU 8086 Icroprocesseur (CPU) 8086Hiba SaghirPas encore d'évaluation
- Le Microprocesseur 8086Document31 pagesLe Microprocesseur 8086Imed Abdesslem100% (1)
- Cours 8086 2015-1Document105 pagesCours 8086 2015-1Dilane GhomsiPas encore d'évaluation
- Microprocesseur 8086Document21 pagesMicroprocesseur 8086Terry Fian82% (11)
- Conception À Microprocesseurs - ArdjaniDocument146 pagesConception À Microprocesseurs - Ardjaniamine menadPas encore d'évaluation
- Microprocess EurDocument12 pagesMicroprocess Eurmabroukoussema61Pas encore d'évaluation
- Cours Microprocesseur MicroControleur M1 GI Chap 3Document15 pagesCours Microprocesseur MicroControleur M1 GI Chap 3Hassan MohamedPas encore d'évaluation
- TP1 Micro PDocument3 pagesTP1 Micro Pleo slegPas encore d'évaluation
- Chapitre 3Document11 pagesChapitre 3Manar BaraãPas encore d'évaluation
- Document 3jbiDocument16 pagesDocument 3jbiFiras ChabbahPas encore d'évaluation
- TP01 MicroprpcesseurDocument19 pagesTP01 MicroprpcesseurHanae BoutabaPas encore d'évaluation
- 8086 PDFDocument14 pages8086 PDFHichem HamdiPas encore d'évaluation
- Cours 8 AssembleurDocument40 pagesCours 8 AssembleurMohammed DarouichePas encore d'évaluation
- Présentation Chapitre 567Document30 pagesPrésentation Chapitre 567faouzighribiPas encore d'évaluation
- Interfaçage Du Microprocesseur 8086Document29 pagesInterfaçage Du Microprocesseur 8086Abderrazzak Riali50% (2)
- Emul 8086Document24 pagesEmul 8086Lahcen SibouihPas encore d'évaluation
- PolyasmDocument54 pagesPolyasmDOUNIA100% (1)
- Chapitre 3 AssembleurDocument14 pagesChapitre 3 AssembleurWajdi BelhajPas encore d'évaluation
- Chapitre 1 ΜP APIDocument7 pagesChapitre 1 ΜP APIMohammed ALMUSHIAAPas encore d'évaluation
- Local Media5834431901403907515Document24 pagesLocal Media5834431901403907515chatyasPas encore d'évaluation
- Structure 68000Document9 pagesStructure 68000Otman Mchachti100% (2)
- Assembleur 8086Document83 pagesAssembleur 8086Yassine Jammeli100% (1)
- Chapitre4 8086 PDFDocument14 pagesChapitre4 8086 PDFReda TadjeddinePas encore d'évaluation
- Chapitre2 Architecture Interne PDFDocument8 pagesChapitre2 Architecture Interne PDFReda TadjeddinePas encore d'évaluation
- TP 555Document7 pagesTP 555ʚïɞ OùŠšàmà ʚïɞPas encore d'évaluation
- Chapitre 1Document25 pagesChapitre 1bouk omraPas encore d'évaluation
- TP2 Micro 2Document8 pagesTP2 Micro 2Riadh CrbPas encore d'évaluation
- Le Microprocesseur 8086 8088Document16 pagesLe Microprocesseur 8086 8088Nassimos YalanosPas encore d'évaluation
- 2-Registres 8080 - 8086 - FLAGSDocument6 pages2-Registres 8080 - 8086 - FLAGSkaifallahghitaPas encore d'évaluation
- 3 Cours Microprocesseur 16 BitsDocument15 pages3 Cours Microprocesseur 16 BitsSeghiour AbdellatifPas encore d'évaluation
- SAM - Chapitre 3 - Partie 1Document8 pagesSAM - Chapitre 3 - Partie 1الشاب المسلمPas encore d'évaluation
- Cours Microcontrôleur MCS-51Document19 pagesCours Microcontrôleur MCS-51Maha BadriPas encore d'évaluation
- coursSDN2 ch3Document27 pagescoursSDN2 ch3Mounir AhmedouPas encore d'évaluation
- Registres, Mémoire Et Instructions Arithmétiques/Logiques Du 8086Document18 pagesRegistres, Mémoire Et Instructions Arithmétiques/Logiques Du 8086meryPas encore d'évaluation
- 02 - La Mémoire 2Document20 pages02 - La Mémoire 2Farouk MoflohPas encore d'évaluation
- Microprocesseur8086 MergedDocument19 pagesMicroprocesseur8086 MergedMouhamed MoustaphaPas encore d'évaluation
- Le Pic 16f877Document5 pagesLe Pic 16f877karam karamPas encore d'évaluation
- 9) Microprocesseur 8086Document44 pages9) Microprocesseur 8086oussama sahliPas encore d'évaluation
- Arbre quadruple: Exploration des structures de données hiérarchiques pour l'analyse d'imagesD'EverandArbre quadruple: Exploration des structures de données hiérarchiques pour l'analyse d'imagesPas encore d'évaluation
- Remplissage d'inondation: Flood Fill : Explorer le terrain dynamique de la vision par ordinateurD'EverandRemplissage d'inondation: Flood Fill : Explorer le terrain dynamique de la vision par ordinateurPas encore d'évaluation
- Banque de filtres: Aperçu des techniques de banque de filtres de Computer VisionD'EverandBanque de filtres: Aperçu des techniques de banque de filtres de Computer VisionPas encore d'évaluation
- Rendu de ligne de balayage: Explorer le réalisme visuel grâce aux techniques de rendu ScanlineD'EverandRendu de ligne de balayage: Explorer le réalisme visuel grâce aux techniques de rendu ScanlinePas encore d'évaluation
- Cle USB UEFI PDFDocument8 pagesCle USB UEFI PDFJean-Claude HOUEDANOUPas encore d'évaluation
- Édition de Windows 10clé de Produit GénériqueDocument3 pagesÉdition de Windows 10clé de Produit GénériquegratienkatembokibasuPas encore d'évaluation
- Installation Des LogicielsDocument4 pagesInstallation Des Logicielsfils makitaPas encore d'évaluation
- Msi Geforce GTX 1080 Ti Gaming X 11g Datasheet PDFDocument1 pageMsi Geforce GTX 1080 Ti Gaming X 11g Datasheet PDFAnouar SpeedPas encore d'évaluation
- Plantage Au Boot Suite Au Formatage D Un OsDocument5 pagesPlantage Au Boot Suite Au Formatage D Un OsFranck Carin Tchuitio TchakamPas encore d'évaluation
- Erreur 5Document2 pagesErreur 5Chiril ColotencoPas encore d'évaluation
- TP Debug InfoDocument47 pagesTP Debug InfoBagol SayaPas encore d'évaluation
- Touche Menu BootDocument2 pagesTouche Menu BootMoussa LompoPas encore d'évaluation
- Installer Windows XP Avec Une Clef USBDocument11 pagesInstaller Windows XP Avec Une Clef USBbolathebear100% (1)
- HomeDocument6 pagesHomeEmmanuel ZorrellyPas encore d'évaluation
- Guide Pratique SEDocument22 pagesGuide Pratique SELandry KikauPas encore d'évaluation
- TP MsdosDocument12 pagesTP MsdosMorel SimoPas encore d'évaluation
- Manual DVD Portatil jr4dvdrw - PCDocument76 pagesManual DVD Portatil jr4dvdrw - PCbinwillyPas encore d'évaluation
- Chapitre4 8086 PDFDocument14 pagesChapitre4 8086 PDFReda TadjeddinePas encore d'évaluation
- Asus Striker II NSE Motherboard User Guide FrenchDocument40 pagesAsus Striker II NSE Motherboard User Guide FrenchsmartmeisterPas encore d'évaluation
- CloneZilla Partie 1 Créer Une Image SystemeDocument12 pagesCloneZilla Partie 1 Créer Une Image SystemetitusPas encore d'évaluation
- Photo To Cartoon 7.0.5283.37168 NovirusDocument2 pagesPhoto To Cartoon 7.0.5283.37168 NovirusImed HammoudaPas encore d'évaluation
- TP Debug InfoDocument15 pagesTP Debug InfoSalman AslamPas encore d'évaluation
- Micro Pratique Hors-Serie N33 Windows 10Document100 pagesMicro Pratique Hors-Serie N33 Windows 10Georges AkbannPas encore d'évaluation
- TP Configuration Du BiosDocument15 pagesTP Configuration Du BiosMohamed NokairiPas encore d'évaluation
- Safety Information - Information de Sécurité - Sicherheitsinformation - Información de SeguridadDocument2 pagesSafety Information - Information de Sécurité - Sicherheitsinformation - Información de SeguridadRyan PambudiPas encore d'évaluation
- Mas Entreprise - Inv Mas PC - 2022-11-30 10 - 14 PDFDocument23 pagesMas Entreprise - Inv Mas PC - 2022-11-30 10 - 14 PDFBahri SlimPas encore d'évaluation
- Precios Adni System 16 de Setiembre 2022Document184 pagesPrecios Adni System 16 de Setiembre 2022Jesus CarrascoPas encore d'évaluation
- TD2Document2 pagesTD2pro madridPas encore d'évaluation
- UsbFix ReportDocument7 pagesUsbFix ReportBassem MeradjiPas encore d'évaluation
- Autres Tuto DDocument6 pagesAutres Tuto DPaul DayangPas encore d'évaluation
- Maintenance Informatique L1Document117 pagesMaintenance Informatique L1kzstkgtqfpPas encore d'évaluation
- Cle DDocument29 pagesCle DTriki BilelPas encore d'évaluation
- Crack WindevDocument1 pageCrack WindevHamza Elkina50% (4)
- Installation Windev 17 Sur W8Document1 pageInstallation Windev 17 Sur W8bendjillali youcef100% (1)






















































































Télécharger au format pdf ou txt
Vous aimerez peut-être aussi
- 6809 EnsaDocument15 pages6809 EnsaAchraf Rossoneri75% (12)
- Chapitre3 ProfDocument21 pagesChapitre3 ProfFedi AffesPas encore d'évaluation
- CH 2Document45 pagesCH 2raghda amamiPas encore d'évaluation
- Note de Cours Chap 3 Et 4 - 2Document42 pagesNote de Cours Chap 3 Et 4 - 2Амр ХашмиPas encore d'évaluation
- Chapitre 3Document47 pagesChapitre 3Anwer BaccarPas encore d'évaluation
- Cours No 04 Etude de L'architecture Du Microprocesseur 8086Document6 pagesCours No 04 Etude de L'architecture Du Microprocesseur 8086Wassim AmamichePas encore d'évaluation
- Etude de L'architecture Du Microprocesseur 8086.: Chapitre N 04Document6 pagesEtude de L'architecture Du Microprocesseur 8086.: Chapitre N 04Zakaria ToualbiaPas encore d'évaluation
- 5cpu 8086Document9 pages5cpu 8086Ben Aissa OussamaPas encore d'évaluation
- Module 1 - 8086Document19 pagesModule 1 - 8086Hiba TounePas encore d'évaluation
- Le Microprocesseur 8086Document22 pagesLe Microprocesseur 8086Merbai YassinePas encore d'évaluation
- 04 Microprocesseur 8086Document18 pages04 Microprocesseur 8086nesrine ninaPas encore d'évaluation
- Microprocess EurDocument12 pagesMicroprocess Eurmabroukoussema61Pas encore d'évaluation
- 3 MemoireDocument6 pages3 MemoirekaifallahghitaPas encore d'évaluation
- Cours Assembleur IIDocument25 pagesCours Assembleur IImhaouch AyoubPas encore d'évaluation
- Cours ArchOrdi Chap2Document26 pagesCours ArchOrdi Chap2Houda SenoussiPas encore d'évaluation
- Chapitre IV Le Microprocesseur Intel 8086Document12 pagesChapitre IV Le Microprocesseur Intel 8086Aziz BechPas encore d'évaluation
- Microprocesseur 8086Document79 pagesMicroprocesseur 8086Hichem Hamdi100% (3)
- Chapitre 3Document49 pagesChapitre 3Hamza BeninePas encore d'évaluation
- A-Préliminaires B - Présentation de CPU 8086 C - Registres de CPU 8086 Icroprocesseur (CPU) 8086Document34 pagesA-Préliminaires B - Présentation de CPU 8086 C - Registres de CPU 8086 Icroprocesseur (CPU) 8086Hiba SaghirPas encore d'évaluation
- Le Microprocesseur 8086Document31 pagesLe Microprocesseur 8086Imed Abdesslem100% (1)
- Cours 8086 2015-1Document105 pagesCours 8086 2015-1Dilane GhomsiPas encore d'évaluation
- Microprocesseur 8086Document21 pagesMicroprocesseur 8086Terry Fian82% (11)
- Conception À Microprocesseurs - ArdjaniDocument146 pagesConception À Microprocesseurs - Ardjaniamine menadPas encore d'évaluation
- Microprocess EurDocument12 pagesMicroprocess Eurmabroukoussema61Pas encore d'évaluation
- Cours Microprocesseur MicroControleur M1 GI Chap 3Document15 pagesCours Microprocesseur MicroControleur M1 GI Chap 3Hassan MohamedPas encore d'évaluation
- TP1 Micro PDocument3 pagesTP1 Micro Pleo slegPas encore d'évaluation
- Chapitre 3Document11 pagesChapitre 3Manar BaraãPas encore d'évaluation
- Document 3jbiDocument16 pagesDocument 3jbiFiras ChabbahPas encore d'évaluation
- TP01 MicroprpcesseurDocument19 pagesTP01 MicroprpcesseurHanae BoutabaPas encore d'évaluation
- 8086 PDFDocument14 pages8086 PDFHichem HamdiPas encore d'évaluation
- Cours 8 AssembleurDocument40 pagesCours 8 AssembleurMohammed DarouichePas encore d'évaluation
- Présentation Chapitre 567Document30 pagesPrésentation Chapitre 567faouzighribiPas encore d'évaluation
- Interfaçage Du Microprocesseur 8086Document29 pagesInterfaçage Du Microprocesseur 8086Abderrazzak Riali50% (2)
- Emul 8086Document24 pagesEmul 8086Lahcen SibouihPas encore d'évaluation
- PolyasmDocument54 pagesPolyasmDOUNIA100% (1)
- Chapitre 3 AssembleurDocument14 pagesChapitre 3 AssembleurWajdi BelhajPas encore d'évaluation
- Chapitre 1 ΜP APIDocument7 pagesChapitre 1 ΜP APIMohammed ALMUSHIAAPas encore d'évaluation
- Local Media5834431901403907515Document24 pagesLocal Media5834431901403907515chatyasPas encore d'évaluation
- Structure 68000Document9 pagesStructure 68000Otman Mchachti100% (2)
- Assembleur 8086Document83 pagesAssembleur 8086Yassine Jammeli100% (1)
- Chapitre4 8086 PDFDocument14 pagesChapitre4 8086 PDFReda TadjeddinePas encore d'évaluation
- Chapitre2 Architecture Interne PDFDocument8 pagesChapitre2 Architecture Interne PDFReda TadjeddinePas encore d'évaluation
- TP 555Document7 pagesTP 555ʚïɞ OùŠšàmà ʚïɞPas encore d'évaluation
- Chapitre 1Document25 pagesChapitre 1bouk omraPas encore d'évaluation
- TP2 Micro 2Document8 pagesTP2 Micro 2Riadh CrbPas encore d'évaluation
- Le Microprocesseur 8086 8088Document16 pagesLe Microprocesseur 8086 8088Nassimos YalanosPas encore d'évaluation
- 2-Registres 8080 - 8086 - FLAGSDocument6 pages2-Registres 8080 - 8086 - FLAGSkaifallahghitaPas encore d'évaluation
- 3 Cours Microprocesseur 16 BitsDocument15 pages3 Cours Microprocesseur 16 BitsSeghiour AbdellatifPas encore d'évaluation
- SAM - Chapitre 3 - Partie 1Document8 pagesSAM - Chapitre 3 - Partie 1الشاب المسلمPas encore d'évaluation
- Cours Microcontrôleur MCS-51Document19 pagesCours Microcontrôleur MCS-51Maha BadriPas encore d'évaluation
- coursSDN2 ch3Document27 pagescoursSDN2 ch3Mounir AhmedouPas encore d'évaluation
- Registres, Mémoire Et Instructions Arithmétiques/Logiques Du 8086Document18 pagesRegistres, Mémoire Et Instructions Arithmétiques/Logiques Du 8086meryPas encore d'évaluation
- 02 - La Mémoire 2Document20 pages02 - La Mémoire 2Farouk MoflohPas encore d'évaluation
- Microprocesseur8086 MergedDocument19 pagesMicroprocesseur8086 MergedMouhamed MoustaphaPas encore d'évaluation
- Le Pic 16f877Document5 pagesLe Pic 16f877karam karamPas encore d'évaluation
- 9) Microprocesseur 8086Document44 pages9) Microprocesseur 8086oussama sahliPas encore d'évaluation
- Arbre quadruple: Exploration des structures de données hiérarchiques pour l'analyse d'imagesD'EverandArbre quadruple: Exploration des structures de données hiérarchiques pour l'analyse d'imagesPas encore d'évaluation
- Remplissage d'inondation: Flood Fill : Explorer le terrain dynamique de la vision par ordinateurD'EverandRemplissage d'inondation: Flood Fill : Explorer le terrain dynamique de la vision par ordinateurPas encore d'évaluation
- Banque de filtres: Aperçu des techniques de banque de filtres de Computer VisionD'EverandBanque de filtres: Aperçu des techniques de banque de filtres de Computer VisionPas encore d'évaluation
- Rendu de ligne de balayage: Explorer le réalisme visuel grâce aux techniques de rendu ScanlineD'EverandRendu de ligne de balayage: Explorer le réalisme visuel grâce aux techniques de rendu ScanlinePas encore d'évaluation
- Cle USB UEFI PDFDocument8 pagesCle USB UEFI PDFJean-Claude HOUEDANOUPas encore d'évaluation
- Édition de Windows 10clé de Produit GénériqueDocument3 pagesÉdition de Windows 10clé de Produit GénériquegratienkatembokibasuPas encore d'évaluation
- Installation Des LogicielsDocument4 pagesInstallation Des Logicielsfils makitaPas encore d'évaluation
- Msi Geforce GTX 1080 Ti Gaming X 11g Datasheet PDFDocument1 pageMsi Geforce GTX 1080 Ti Gaming X 11g Datasheet PDFAnouar SpeedPas encore d'évaluation
- Plantage Au Boot Suite Au Formatage D Un OsDocument5 pagesPlantage Au Boot Suite Au Formatage D Un OsFranck Carin Tchuitio TchakamPas encore d'évaluation
- Erreur 5Document2 pagesErreur 5Chiril ColotencoPas encore d'évaluation
- TP Debug InfoDocument47 pagesTP Debug InfoBagol SayaPas encore d'évaluation
- Touche Menu BootDocument2 pagesTouche Menu BootMoussa LompoPas encore d'évaluation
- Installer Windows XP Avec Une Clef USBDocument11 pagesInstaller Windows XP Avec Une Clef USBbolathebear100% (1)
- HomeDocument6 pagesHomeEmmanuel ZorrellyPas encore d'évaluation
- Guide Pratique SEDocument22 pagesGuide Pratique SELandry KikauPas encore d'évaluation
- TP MsdosDocument12 pagesTP MsdosMorel SimoPas encore d'évaluation
- Manual DVD Portatil jr4dvdrw - PCDocument76 pagesManual DVD Portatil jr4dvdrw - PCbinwillyPas encore d'évaluation
- Chapitre4 8086 PDFDocument14 pagesChapitre4 8086 PDFReda TadjeddinePas encore d'évaluation
- Asus Striker II NSE Motherboard User Guide FrenchDocument40 pagesAsus Striker II NSE Motherboard User Guide FrenchsmartmeisterPas encore d'évaluation
- CloneZilla Partie 1 Créer Une Image SystemeDocument12 pagesCloneZilla Partie 1 Créer Une Image SystemetitusPas encore d'évaluation
- Photo To Cartoon 7.0.5283.37168 NovirusDocument2 pagesPhoto To Cartoon 7.0.5283.37168 NovirusImed HammoudaPas encore d'évaluation
- TP Debug InfoDocument15 pagesTP Debug InfoSalman AslamPas encore d'évaluation
- Micro Pratique Hors-Serie N33 Windows 10Document100 pagesMicro Pratique Hors-Serie N33 Windows 10Georges AkbannPas encore d'évaluation
- TP Configuration Du BiosDocument15 pagesTP Configuration Du BiosMohamed NokairiPas encore d'évaluation
- Safety Information - Information de Sécurité - Sicherheitsinformation - Información de SeguridadDocument2 pagesSafety Information - Information de Sécurité - Sicherheitsinformation - Información de SeguridadRyan PambudiPas encore d'évaluation
- Mas Entreprise - Inv Mas PC - 2022-11-30 10 - 14 PDFDocument23 pagesMas Entreprise - Inv Mas PC - 2022-11-30 10 - 14 PDFBahri SlimPas encore d'évaluation
- Precios Adni System 16 de Setiembre 2022Document184 pagesPrecios Adni System 16 de Setiembre 2022Jesus CarrascoPas encore d'évaluation
- TD2Document2 pagesTD2pro madridPas encore d'évaluation
- UsbFix ReportDocument7 pagesUsbFix ReportBassem MeradjiPas encore d'évaluation
- Autres Tuto DDocument6 pagesAutres Tuto DPaul DayangPas encore d'évaluation
- Maintenance Informatique L1Document117 pagesMaintenance Informatique L1kzstkgtqfpPas encore d'évaluation
- Cle DDocument29 pagesCle DTriki BilelPas encore d'évaluation
- Crack WindevDocument1 pageCrack WindevHamza Elkina50% (4)
- Installation Windev 17 Sur W8Document1 pageInstallation Windev 17 Sur W8bendjillali youcef100% (1)