Vous aimerez peut-être aussi
- Le Microprocesseur 8086 8088Document16 pagesLe Microprocesseur 8086 8088Nassimos YalanosPas encore d'évaluation
- LabviewDocument19 pagesLabviewtortorouPas encore d'évaluation
- G: DFLDocument16 pagesG: DFLAmar MedjaldiPas encore d'évaluation
- Cours - Architecture ch4Document41 pagesCours - Architecture ch4Hoody 05100% (1)
- Simulation D'une Carte de Commande A Base de PicDocument63 pagesSimulation D'une Carte de Commande A Base de Pictanweer100% (1)
- IIA - Régulation Et Asszervissement - Chap3 - Schema Bloc - 20 Oct 22Document4 pagesIIA - Régulation Et Asszervissement - Chap3 - Schema Bloc - 20 Oct 22TECHNOLOGIES MODERNES DU CAMEROUNPas encore d'évaluation
- Presentation Du Pic 16f877 PDFDocument22 pagesPresentation Du Pic 16f877 PDFyoussefPas encore d'évaluation
- Exemple Grafcet Cycle Pendulaire en LadderDocument3 pagesExemple Grafcet Cycle Pendulaire en LadderAchraf MoussafirPas encore d'évaluation
- Correction EXamen 2018 Actionneur SpéciauxDocument4 pagesCorrection EXamen 2018 Actionneur Spéciauxkhaled100% (1)
- Assemleur 8051Document47 pagesAssemleur 8051Hosni Mohamed100% (1)
- Cours ListDocument17 pagesCours ListWa ILPas encore d'évaluation
- Td2 Trans StatiqueDocument5 pagesTd2 Trans Statiquesara100% (1)
- Abdou. Initiation API Millenium 3Document21 pagesAbdou. Initiation API Millenium 3sethabdellahPas encore d'évaluation
- Exercices - 3ISE Info IndustrielleDocument2 pagesExercices - 3ISE Info IndustrielleDany Mbadinga0% (1)
- Rapport Tap Univ BBA Partie 1Document25 pagesRapport Tap Univ BBA Partie 1Emy ImenePas encore d'évaluation
- La Commande D'un Moteur Pas À Pas Par Un Arduino-UNODocument42 pagesLa Commande D'un Moteur Pas À Pas Par Un Arduino-UNOwal.d.papelPas encore d'évaluation
- Chapiiiiiiitre 3Document7 pagesChapiiiiiiitre 3haknmPas encore d'évaluation
- Synthese Des Hacheurs JCRDocument7 pagesSynthese Des Hacheurs JCRDriss GhandiPas encore d'évaluation
- ControleDocument6 pagesControleمحفوظ سعيدPas encore d'évaluation
- Chapitre V - Cours - TEAI - 5Document12 pagesChapitre V - Cours - TEAI - 5Wã Lïd SãådätPas encore d'évaluation
- Technique Rapports Realisation D Un Robot Teleguide Par InfrarougeDocument18 pagesTechnique Rapports Realisation D Un Robot Teleguide Par InfrarougeThe geek Cuesta100% (1)
- Moteur Pas - À-Pas Chapitre 2Document7 pagesMoteur Pas - À-Pas Chapitre 2Adel Haddad HauntedPas encore d'évaluation
- API Chap4 Inro Programmation-1Document39 pagesAPI Chap4 Inro Programmation-1Hamenih AbdyPas encore d'évaluation
- Chapitre 1: Les Actionneurs Électriques: Licence Sciences Et Techniques. Génie Mécanique R. HabachiDocument55 pagesChapitre 1: Les Actionneurs Électriques: Licence Sciences Et Techniques. Génie Mécanique R. Habachiyoussef 122Pas encore d'évaluation
- Rapport de AKAFFOUDocument16 pagesRapport de AKAFFOUkpea chris dylanPas encore d'évaluation
- TP2 - Commande D'un Moteur Pas - À - Pas - BIPOLAIREDocument12 pagesTP2 - Commande D'un Moteur Pas - À - Pas - BIPOLAIREBoukahil Aymen100% (1)
- Polycope-TP Capteurs EEA 2021Document32 pagesPolycope-TP Capteurs EEA 2021AradPas encore d'évaluation
- Rapport BE - SME - EzzainabiDocument23 pagesRapport BE - SME - EzzainabiHassanZainabiPas encore d'évaluation
- TP 4 ApiDocument2 pagesTP 4 Apiayoub belaidiPas encore d'évaluation
- Chap8-Les RegistresDocument6 pagesChap8-Les RegistresAhmed GourinePas encore d'évaluation
- Moteur Asynchrone Essai Part13 PDFDocument4 pagesMoteur Asynchrone Essai Part13 PDFLuis CuellarPas encore d'évaluation
- Cours Systémes Echantillonnés 1Document13 pagesCours Systémes Echantillonnés 1Shompinho Matloaa100% (1)
- TP2 TapDocument6 pagesTP2 TapReda BadroPas encore d'évaluation
- Cours Régulation Et Commande AvancéDocument89 pagesCours Régulation Et Commande AvancéRebiat YacinePas encore d'évaluation
- Projet Generateur de Fonction PDFDocument14 pagesProjet Generateur de Fonction PDFLoye PharèsPas encore d'évaluation
- Chap RedressementDocument28 pagesChap RedressementBousmaha YoucefPas encore d'évaluation
- Approximation Du Modèle Géométrique Inverse D'un Robot Manipulateur Par Les Réseaux de Neurones ArtificielsDocument70 pagesApproximation Du Modèle Géométrique Inverse D'un Robot Manipulateur Par Les Réseaux de Neurones ArtificielsMohamed LahninePas encore d'évaluation
- Les Microcontrôleurs PIC de MicrochipDocument28 pagesLes Microcontrôleurs PIC de MicrochipMohamed CoulibalyPas encore d'évaluation
- COMPTE TP2 CapteurDocument16 pagesCOMPTE TP2 CapteurGuergour WalidPas encore d'évaluation
- TP N °1: Vérin:: Commande Par Microprocesseur 6809Document10 pagesTP N °1: Vérin:: Commande Par Microprocesseur 6809Mouhcine Ben MoussaPas encore d'évaluation
- Exercices Gracets CoordonnesDocument5 pagesExercices Gracets CoordonnessaulnierPas encore d'évaluation
- Serie Exo AutomatismesDocument8 pagesSerie Exo AutomatismesSalimMalekPas encore d'évaluation
- 02-Synthese DissipateurDocument4 pages02-Synthese DissipateurBuen ChicoPas encore d'évaluation
- Automate TSX3705Document8 pagesAutomate TSX3705Hans lionel ABAGHA ELLAPas encore d'évaluation
- Enoncé TP 02Document14 pagesEnoncé TP 02Nizar Toujeni100% (1)
- Chap 3-Redressement Commandée Monophasé 20011-BF-OKDocument73 pagesChap 3-Redressement Commandée Monophasé 20011-BF-OKAnonymous R8mA5JFjTPas encore d'évaluation
- TD Grafcet 06 02 23Document10 pagesTD Grafcet 06 02 23Hamadi DialloPas encore d'évaluation
- Programme Étude Des Systèmes Techniques IndustrielsDocument9 pagesProgramme Étude Des Systèmes Techniques IndustrielsRaphaël SimoninPas encore d'évaluation
- TP8 MCCprofDocument8 pagesTP8 MCCprofPatrick DelsolPas encore d'évaluation
- TP2 MicroprocesseurDocument14 pagesTP2 MicroprocesseurAdem AounPas encore d'évaluation
- TP Microprocesseur ControleurDocument32 pagesTP Microprocesseur ControleurSalma NsalmaPas encore d'évaluation
- 2 Prog AssembleurDocument5 pages2 Prog AssembleurAnonymous Cr8uWCWxu100% (1)
- Utilisation Logipicv2Document20 pagesUtilisation Logipicv2alyamor100% (1)
- Jeu D - Instructions Du PIC16F84ADocument9 pagesJeu D - Instructions Du PIC16F84AOMAR ENNAJIPas encore d'évaluation
- Tp02 Les Circuits CombinatoiresDocument14 pagesTp02 Les Circuits CombinatoiresLamine MossadakPas encore d'évaluation
- Etude Et Simulation D'un Capteur de Pression CapacitifDocument79 pagesEtude Et Simulation D'un Capteur de Pression CapacitifHassan B'ouPas encore d'évaluation
- 727 PDFDocument93 pages727 PDFBachir BchiriPas encore d'évaluation
- Théorie et conception des filtres analogiques, 2e édition: Avec MatlabD'EverandThéorie et conception des filtres analogiques, 2e édition: Avec MatlabPas encore d'évaluation
- Twistronics: Le saint graal de la physique, des matériaux quantiques et des nanotechnologiesD'EverandTwistronics: Le saint graal de la physique, des matériaux quantiques et des nanotechnologiesPas encore d'évaluation
- Global M2 RTDocument2 pagesGlobal M2 RTАмр ХашмиPas encore d'évaluation
- Rattrapage Calculateurs Et Interfacage Telecoms S5Document2 pagesRattrapage Calculateurs Et Interfacage Telecoms S5Амр ХашмиPas encore d'évaluation
- Notes de Cours Calculateurs - Interfacage - Chap 1 - 2Document27 pagesNotes de Cours Calculateurs - Interfacage - Chap 1 - 2Амр ХашмиPas encore d'évaluation
- Planning Rattrapage 2019-2020-L3S5 GEDocument1 pagePlanning Rattrapage 2019-2020-L3S5 GEАмр ХашмиPas encore d'évaluation
- Chapitre 2 4pDocument32 pagesChapitre 2 4pFiras KachroudiPas encore d'évaluation
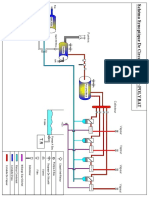
- Schéma Synoptique de Circuit de Vapeur POLYBATDocument1 pageSchéma Synoptique de Circuit de Vapeur POLYBATZribi AmeniPas encore d'évaluation
- Pneu Premier Prix 165 70 R13 79T 150634 21002069 PDFDocument1 pagePneu Premier Prix 165 70 R13 79T 150634 21002069 PDFJean EudesPas encore d'évaluation
- Memoire - FinalDocument83 pagesMemoire - FinalKhadija BelkasPas encore d'évaluation
- Android France FR 2009-12-23 Integrer Des Pub Admob Dans SesDocument17 pagesAndroid France FR 2009-12-23 Integrer Des Pub Admob Dans SesYoussef AddiPas encore d'évaluation
- Exercices TransistorDocument2 pagesExercices Transistorمسلمة حرةPas encore d'évaluation
- Expose Sur Le PontDocument42 pagesExpose Sur Le PontPrince IrPas encore d'évaluation
- PC Astuces - Protéger Ses Enfants Sous Windows 7Document4 pagesPC Astuces - Protéger Ses Enfants Sous Windows 7Polovsky MG GodenPas encore d'évaluation
- Formation RS MINERVEDocument7 pagesFormation RS MINERVEthiePas encore d'évaluation
- Microsoft Office Directeur D'écoleDocument2 pagesMicrosoft Office Directeur D'écoleInformatiqueEducationPas encore d'évaluation
- Choix Outil ReportingDocument4 pagesChoix Outil ReportingJihad MifdalPas encore d'évaluation
- Technicien de Maintenance en Chauffage Ventilation Et ClimatisationDocument3 pagesTechnicien de Maintenance en Chauffage Ventilation Et ClimatisationGastov GhassenPas encore d'évaluation
- Ac 989 Port-BouetDocument56 pagesAc 989 Port-BouetAIME KOULOUPas encore d'évaluation
- Présentation D'une Boutique de Quartier Au Cameroun Dans La Ville de YaoundéDocument22 pagesPrésentation D'une Boutique de Quartier Au Cameroun Dans La Ville de YaoundéGabriel MonsieurPas encore d'évaluation
- Gestion de Droits D'accès Dans Des Réseaux Informatiques: MémoireDocument101 pagesGestion de Droits D'accès Dans Des Réseaux Informatiques: MémoireMohamed SaadaouiPas encore d'évaluation
- CindyniqueDocument3 pagesCindyniqueSilvia JaimesPas encore d'évaluation
- EBS Premium DXI 460Document128 pagesEBS Premium DXI 460Babacar Ndiaye100% (1)
- Economie Numerique Partie1Document30 pagesEconomie Numerique Partie1Seydou TourePas encore d'évaluation
- Exercices Excel 2000 - Tome 2Document102 pagesExercices Excel 2000 - Tome 2MDADAPas encore d'évaluation
- API EleveDocument6 pagesAPI EleveAFADPas encore d'évaluation
- BS PcVue-Solutions Energy-Management-System FRDocument9 pagesBS PcVue-Solutions Energy-Management-System FRTaha Ben AmorPas encore d'évaluation
- Compte RenduDocument1 pageCompte RendumarouenPas encore d'évaluation
- Enoncé-Projet en Langage CDocument4 pagesEnoncé-Projet en Langage CKhadija ELFRANIPas encore d'évaluation
- Cours - Traitement de TexteDocument3 pagesCours - Traitement de Texteأحمد رميدةPas encore d'évaluation
- Guide Pour La Constitution Des Dossiers Pour L'émission de La Monnaie Électronique Par Les Trésors Publics NationauxDocument26 pagesGuide Pour La Constitution Des Dossiers Pour L'émission de La Monnaie Électronique Par Les Trésors Publics NationauxChamgwei IzuzuPas encore d'évaluation
- TD 5Document2 pagesTD 5LGT AMINEPas encore d'évaluation
- Cours - Technologie ÉlectriqueDocument36 pagesCours - Technologie ÉlectriqueOuedraogo HassanePas encore d'évaluation
- Livraison Par Geodis Secteur TextileDocument3 pagesLivraison Par Geodis Secteur Textilemoi149Pas encore d'évaluation
- Cours 2 Fibre OptiqueDocument6 pagesCours 2 Fibre OptiqueFaty GueyePas encore d'évaluation
- Chap 4 Gestion GroupesDocument15 pagesChap 4 Gestion Groupessoutien russePas encore d'évaluation