Vous aimerez peut-être aussi
- Cours 8086 2015-1Document105 pagesCours 8086 2015-1Dilane GhomsiPas encore d'évaluation
- Document 3jbiDocument16 pagesDocument 3jbiFiras ChabbahPas encore d'évaluation
- Chapitre 3Document11 pagesChapitre 3Manar BaraãPas encore d'évaluation
- Cours Assembleur IIDocument25 pagesCours Assembleur IImhaouch AyoubPas encore d'évaluation
- TP01 MicroprpcesseurDocument19 pagesTP01 MicroprpcesseurHanae BoutabaPas encore d'évaluation
- A-Préliminaires B - Présentation de CPU 8086 C - Registres de CPU 8086 Icroprocesseur (CPU) 8086Document34 pagesA-Préliminaires B - Présentation de CPU 8086 C - Registres de CPU 8086 Icroprocesseur (CPU) 8086Hiba SaghirPas encore d'évaluation
- Cours Microprocesseur MicroControleur M1 GI Chap 3Document15 pagesCours Microprocesseur MicroControleur M1 GI Chap 3Hassan MohamedPas encore d'évaluation
- Le Microprocesseur 8086 8088Document16 pagesLe Microprocesseur 8086 8088Nassimos YalanosPas encore d'évaluation
- Cours No 04 Etude de L'architecture Du Microprocesseur 8086Document6 pagesCours No 04 Etude de L'architecture Du Microprocesseur 8086Wassim AmamichePas encore d'évaluation
- Etude de L'architecture Du Microprocesseur 8086.: Chapitre N 04Document6 pagesEtude de L'architecture Du Microprocesseur 8086.: Chapitre N 04Zakaria ToualbiaPas encore d'évaluation
- Emul 8086Document24 pagesEmul 8086Lahcen SibouihPas encore d'évaluation
- Chapitre 3 Microprocesseurs 8086 C2I2!S S1Document30 pagesChapitre 3 Microprocesseurs 8086 C2I2!S S1Karym ElhoussinePas encore d'évaluation
- Microprocesseur8086 MergedDocument19 pagesMicroprocesseur8086 MergedMouhamed MoustaphaPas encore d'évaluation
- Le Microprocesseur 8086Document31 pagesLe Microprocesseur 8086Imed Abdesslem100% (1)
- Cours ArchOrdi Chap2Document26 pagesCours ArchOrdi Chap2Houda SenoussiPas encore d'évaluation
- Assembleur 8086Document83 pagesAssembleur 8086Yassine Jammeli100% (1)
- Hadil TaymaDocument10 pagesHadil Taymamabroukoussema61Pas encore d'évaluation
- Emul 8086Document24 pagesEmul 8086Med Al ZaïbiPas encore d'évaluation
- Le Microprocesseur 8086Document22 pagesLe Microprocesseur 8086Merbai YassinePas encore d'évaluation
- Chapitre2 Architecture Interne PDFDocument8 pagesChapitre2 Architecture Interne PDFReda TadjeddinePas encore d'évaluation
- 3 Cours Microprocesseur 16 BitsDocument15 pages3 Cours Microprocesseur 16 BitsSeghiour AbdellatifPas encore d'évaluation
- TP1 Micro PDocument3 pagesTP1 Micro Pleo slegPas encore d'évaluation
- CH 2Document45 pagesCH 2raghda amamiPas encore d'évaluation
- Chapitre V MicroprocesseurDocument10 pagesChapitre V MicroprocesseurMouhamed MoustaphaPas encore d'évaluation
- 5cpu 8086Document9 pages5cpu 8086Ben Aissa OussamaPas encore d'évaluation
- Chap4 ICT104Document21 pagesChap4 ICT104christimimbangPas encore d'évaluation
- Chapitre 3Document47 pagesChapitre 3Anwer BaccarPas encore d'évaluation
- Microprocess EurDocument12 pagesMicroprocess Eurmabroukoussema61Pas encore d'évaluation
- Chapitre3 ProfDocument21 pagesChapitre3 ProfFedi AffesPas encore d'évaluation
- TP 555Document7 pagesTP 555ʚïɞ OùŠšàmà ʚïɞPas encore d'évaluation
- Conception À Microprocesseurs - ArdjaniDocument146 pagesConception À Microprocesseurs - Ardjaniamine menadPas encore d'évaluation
- P Et C Chapitre 3Document43 pagesP Et C Chapitre 3oumayma2010Pas encore d'évaluation
- Cours 3 - Chapitre III - Jeux D - Instructions - 2020 PDFDocument35 pagesCours 3 - Chapitre III - Jeux D - Instructions - 2020 PDFboujemaa SAADATPas encore d'évaluation
- Note de Cours Chap 3 Et 4 - 2Document42 pagesNote de Cours Chap 3 Et 4 - 2Амр ХашмиPas encore d'évaluation
- Les Pic 16F877Document14 pagesLes Pic 16F877Haythem FerjaniPas encore d'évaluation
- SAM - Chapitre 3 - Partie 1Document8 pagesSAM - Chapitre 3 - Partie 1الشاب المسلمPas encore d'évaluation
- Microprocesseur 8086Document79 pagesMicroprocesseur 8086Hichem Hamdi100% (3)
- Présentation Chapitre 567Document30 pagesPrésentation Chapitre 567faouzighribiPas encore d'évaluation
- Cours AUT AII M1 SESTRDocument29 pagesCours AUT AII M1 SESTRichrak.djelil.idPas encore d'évaluation
- AssembleurDocument31 pagesAssembleurHajar El atmaniPas encore d'évaluation
- Microprocess EurDocument12 pagesMicroprocess Eurmabroukoussema61Pas encore d'évaluation
- Module 1 - 8086Document19 pagesModule 1 - 8086Hiba TounePas encore d'évaluation
- Uc-16F877 DIADocument14 pagesUc-16F877 DIAPapeCheikh SYLLAPas encore d'évaluation
- Informatique Industrielle - Part1Document29 pagesInformatique Industrielle - Part1Wassim GarredPas encore d'évaluation
- Cours UP Beguenane 1Document21 pagesCours UP Beguenane 1Souhaib Louda100% (1)
- Notes de Cours Calculateurs - Interfacage - Chap 1 - 2Document27 pagesNotes de Cours Calculateurs - Interfacage - Chap 1 - 2Амр ХашмиPas encore d'évaluation
- Microprocess Eur Intel 8086: Elaborée ParDocument9 pagesMicroprocess Eur Intel 8086: Elaborée Parmabroukoussema61Pas encore d'évaluation
- Chapitre 3Document46 pagesChapitre 3Ahmed JguirimPas encore d'évaluation
- Cours Microprocesseur Et MicrocontroleursimplDocument171 pagesCours Microprocesseur Et MicrocontroleursimplAbdou Super100% (1)
- TP2 Micro 2Document8 pagesTP2 Micro 2Riadh CrbPas encore d'évaluation
- Les Systemes A Base de MicroprocesseurDocument8 pagesLes Systemes A Base de Microprocesseura.rharrabPas encore d'évaluation
- Chapitre 3 Le Microcontroleur Pic 16f84Document29 pagesChapitre 3 Le Microcontroleur Pic 16f84Samen LempirePas encore d'évaluation
- Moto 6809Document46 pagesMoto 6809Kawtar FelkiPas encore d'évaluation
- 8) Microprocesseur 8086Document31 pages8) Microprocesseur 8086oussama sahliPas encore d'évaluation
- 9) Microprocesseur 8086Document44 pages9) Microprocesseur 8086oussama sahliPas encore d'évaluation
- AssembleurDocument17 pagesAssembleurSalah DAHOUATHIPas encore d'évaluation
- Exposé Le MicroprocesseurDocument8 pagesExposé Le MicroprocesseurMamadou Seydou Diallo67% (6)
- Chapitre IV Le Microprocesseur Intel 8086Document12 pagesChapitre IV Le Microprocesseur Intel 8086Aziz BechPas encore d'évaluation
- Cours Microcontrôleur MCS-51Document19 pagesCours Microcontrôleur MCS-51Maha BadriPas encore d'évaluation
- Python pour Débutants : Guide Complet pour Apprendre la Programmation Pas à PasD'EverandPython pour Débutants : Guide Complet pour Apprendre la Programmation Pas à PasPas encore d'évaluation
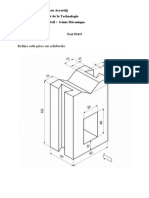
- TP 1 EsquisseDocument2 pagesTP 1 EsquisseMohammed ALMUSHIAAPas encore d'évaluation
- Fon CtionDocument5 pagesFon CtionMohammed ALMUSHIAAPas encore d'évaluation
- tp2 FonctionDocument2 pagestp2 FonctionMohammed ALMUSHIAAPas encore d'évaluation
- TP N 1 EsquisseDocument1 pageTP N 1 EsquisseMohammed ALMUSHIAAPas encore d'évaluation
- TP 1 EsquisseDocument2 pagesTP 1 EsquisseMohammed ALMUSHIAAPas encore d'évaluation
- Techniques Commande AvanceeDocument3 pagesTechniques Commande AvanceeMohammed ALMUSHIAAPas encore d'évaluation
- Esquisses DAO 2016Document10 pagesEsquisses DAO 2016Mohammed ALMUSHIAAPas encore d'évaluation
- TP2 - P APIDocument7 pagesTP2 - P APIMohammed ALMUSHIAAPas encore d'évaluation
- Chapitre 1 ΜP APIDocument7 pagesChapitre 1 ΜP APIMohammed ALMUSHIAAPas encore d'évaluation
- Techniques Commande AvanceeDocument3 pagesTechniques Commande AvanceeMohammed ALMUSHIAAPas encore d'évaluation
- TP4 - P APIDocument1 pageTP4 - P APIMohammed ALMUSHIAAPas encore d'évaluation
- Chapitre 1 Avec Exemples D'applicationsDocument10 pagesChapitre 1 Avec Exemples D'applicationsMohammed ALMUSHIAAPas encore d'évaluation
- Chapitre 2Document4 pagesChapitre 2Mohammed ALMUSHIAAPas encore d'évaluation
- TP4 - P APIDocument1 pageTP4 - P APIMohammed ALMUSHIAAPas encore d'évaluation
- TD3 - P ApiDocument2 pagesTD3 - P ApiMohammed ALMUSHIAAPas encore d'évaluation
- Corrigé Type Examen Final Microprocesseurs Et API Master ELMDocument4 pagesCorrigé Type Examen Final Microprocesseurs Et API Master ELMMohammed ALMUSHIAAPas encore d'évaluation
- Intel 8086Document53 pagesIntel 8086maatoufi1667% (3)
- Chapitre 3 - P APIDocument9 pagesChapitre 3 - P APIMohammed ALMUSHIAAPas encore d'évaluation
- Chapitre 5 - Processeurs API.Document23 pagesChapitre 5 - Processeurs API.Mohammed ALMUSHIAAPas encore d'évaluation
- Chapitre 5 - Processeurs API.Document23 pagesChapitre 5 - Processeurs API.Mohammed ALMUSHIAAPas encore d'évaluation
- Chapitre 2 ΜP APIDocument12 pagesChapitre 2 ΜP APIMohammed ALMUSHIAAPas encore d'évaluation
- Chapitre 4 - P APIDocument12 pagesChapitre 4 - P APIMohammed ALMUSHIAAPas encore d'évaluation
- Assembleur 80X86Document36 pagesAssembleur 80X86Mohammed ALMUSHIAAPas encore d'évaluation
- Chapitre 4 - P APIDocument12 pagesChapitre 4 - P APIMohammed ALMUSHIAAPas encore d'évaluation
- TD2 - P APIDocument2 pagesTD2 - P APIMohammed ALMUSHIAAPas encore d'évaluation
- TD4 - P APIDocument2 pagesTD4 - P APIMohammed ALMUSHIAAPas encore d'évaluation
- Corrigé Type Examen Final Microprocesseurs Et API Master ELMDocument4 pagesCorrigé Type Examen Final Microprocesseurs Et API Master ELMMohammed ALMUSHIAAPas encore d'évaluation
- Intel 8086Document53 pagesIntel 8086maatoufi1667% (3)
- TD3 - P ApiDocument2 pagesTD3 - P ApiMohammed ALMUSHIAAPas encore d'évaluation
- TD1 - P APIDocument2 pagesTD1 - P APIMohammed ALMUSHIAAPas encore d'évaluation
- Bit LockerDocument5 pagesBit LockerSuley PatersonPas encore d'évaluation
- Basys 2Document26 pagesBasys 2Hichem KhamallahPas encore d'évaluation
- Cours - Conception Des ProcessersDocument69 pagesCours - Conception Des ProcessersAhmed GanouniPas encore d'évaluation
- Linux Networking HOWTO (PDFDrive)Document80 pagesLinux Networking HOWTO (PDFDrive)Rams FranckPas encore d'évaluation
- Livres InformatiqueDocument96 pagesLivres InformatiqueThierno Hassane BahPas encore d'évaluation
- 1-Algo (Rappel 1)Document112 pages1-Algo (Rappel 1)farah AfouzarPas encore d'évaluation
- 6ordinateur PeripheriquesDocument2 pages6ordinateur PeripheriquesAnonymous Wpl47Bwu4Pas encore d'évaluation
- TMP 10401 Interface Diagnostic Elm 327.Php 1 1076055030Document9 pagesTMP 10401 Interface Diagnostic Elm 327.Php 1 1076055030Anonymous oyUAtpKPas encore d'évaluation
- Cours 2Document20 pagesCours 2Aziz JeghamPas encore d'évaluation
- Radius Vid2 - Bon01Document8 pagesRadius Vid2 - Bon01AGUE SidoinePas encore d'évaluation
- DISM GUI, Ajouter Un Pilote À Une ISO WindowsDocument6 pagesDISM GUI, Ajouter Un Pilote À Une ISO WindowsmatrixleblancPas encore d'évaluation
- TP PfSense InstallationDocument8 pagesTP PfSense InstallationJogre AmpionPas encore d'évaluation
- Debuter CPPDocument6 pagesDebuter CPPDRAGONSOBTIPas encore d'évaluation
- Rappelle ArduinoDocument42 pagesRappelle ArduinosanadPas encore d'évaluation
- td1 Parallèle 2Document3 pagestd1 Parallèle 2slim yaichPas encore d'évaluation
- Fiche Python 2021 2022Document1 pageFiche Python 2021 2022mariemPas encore d'évaluation
- Pfe Islem RyhemDocument65 pagesPfe Islem Ryhemyassinesalhi0070Pas encore d'évaluation
- Cours 13 PujolleDocument21 pagesCours 13 PujolleEl Amrani LailaPas encore d'évaluation
- Examen de Systeme D Exploitation Linux Enonce CorrigeDocument6 pagesExamen de Systeme D Exploitation Linux Enonce CorrigealoPas encore d'évaluation
- ScripDocument11 pagesScripjospin alonzoPas encore d'évaluation
- NCYBTK2019Document149 pagesNCYBTK2019denisPas encore d'évaluation
- Formation Oracle VM AdministrationDocument156 pagesFormation Oracle VM AdministrationIsshin KurosakiPas encore d'évaluation
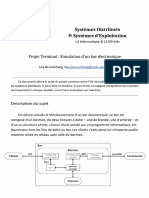
- (1 Iversité Systèmes Distribués: Projet Terminal: Simulation D'un Bar ÉlectroniqueDocument4 pages(1 Iversité Systèmes Distribués: Projet Terminal: Simulation D'un Bar ÉlectroniqueGuilhem ZouhairPas encore d'évaluation
- Cours de LabviewDocument74 pagesCours de LabviewDjouweinannodji YvesPas encore d'évaluation
- Ti89 PDFDocument97 pagesTi89 PDFlelu8210Pas encore d'évaluation
- 2.510229f FR SEMA-200 PDFDocument76 pages2.510229f FR SEMA-200 PDFService Technique MICRO MÉDICALPas encore d'évaluation
- Cours D'algorithmeDocument31 pagesCours D'algorithmeKOUASSIPas encore d'évaluation
- 2015 - Programmation Orientée Objet en JavaDocument218 pages2015 - Programmation Orientée Objet en JavaBabacarDiagoPas encore d'évaluation
- Chap 7 - Exceptions en JAVADocument20 pagesChap 7 - Exceptions en JAVAhafsa ladhassePas encore d'évaluation
- Cours Programmation PythonDocument17 pagesCours Programmation Pythonhicham2012Pas encore d'évaluation