Académique Documents
Professionnel Documents
Culture Documents
Exercices Pour Entrainer
Exercices Pour Entrainer
Transféré par
Abd el moumen HemiciTitre original
Copyright
Formats disponibles
Partager ce document
Partager ou intégrer le document
Avez-vous trouvé ce document utile ?
Ce contenu est-il inapproprié ?
Signaler ce documentDroits d'auteur :
Formats disponibles
Exercices Pour Entrainer
Exercices Pour Entrainer
Transféré par
Abd el moumen HemiciDroits d'auteur :
Formats disponibles
Exercices pour entrainer :
Exercice 01 :
Soit le robot RPR de la figure 01 ci-contre :
La situation X de l’effecteur ‘E’ est décrite par ses
coordonnées cartésiennes (𝑥, 𝑦) ainsi par l’angle 𝛼 du
dernier segment avec l’horizontale, à savoir :
X = (𝑥, 𝑦, 𝛼)𝑇 .
Les coordonnées articulaires sont données par :
q = (𝜃1 , 𝑟2 , 𝜃3 )𝑇 .
On a : 𝑟𝑒 = 0.35𝑚. Figure 01 : Robot plan RPR
1. Donner l’expression du modèle géométrique direct : 𝑋 = 𝑓(𝑞).
2. Donner l’expression du modèle géométrique inverse :𝑞 = 𝑓 −1 (𝑋). Que valent les
variables articulaires pour : 𝑥 = 1𝑚, 𝑦 = 0.8𝑚, 𝛼 = 60°.
Exercice 02 :
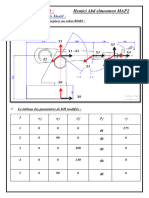
Le robot de la figure ci-contre st un robot 6R.
1. Quel est le type du poignet de ce robot ?
2. Etablir les quatre premières lignes du tableau
des paramètres de Khalil & Kleinfinger.
3. Calculer 0𝑇4
4. Montrer que la position du centre du poignet est
donnée par :
𝑃𝑥 𝑐1 (𝑠23 . 𝑟4 + 𝑑2 + 𝑑3 . 𝑐2 ) − 𝑠1 . 𝑟3
𝑃 = [𝑃𝑦 ] = [𝑠1 (𝑠23 . 𝑟4 + 𝑑2 + 𝑑3 . 𝑐2 ) + 𝑐1 . 𝑟3 ]
𝑃𝑧 𝑐23 . 𝑟4 − 𝑑3 . 𝑠2
5. Calculer cette position pour la configuration zéro
géométrique de la figure 02 et pour : 𝑑2 = 50𝑚𝑚,
𝑑3 = 425𝑚𝑚, 𝑟3 = 50𝑚𝑚 et 𝑟4 = 425𝑚𝑚.
6. Que devient la position de la pince lorsqu’on
choisit le repère de base sur la table d’atelier et
on pose : 𝑂0 𝑂1 = 𝑑1 = 400𝑚𝑚.
Figure 02 : Zéro géométrique du Robot Staùbli TX90
Solution des exercices :
Exercice 01 :
MGD :
𝑥 = 𝑟2 ∗ 𝑐𝑜𝑠(𝜃1 ) + 𝑟𝑒 ∗ 𝑐𝑜𝑠(𝜃1 + 𝜃3 )
{ 𝑦 = 𝑟2 ∗ 𝑠𝑖𝑛(𝜃1 ) + 𝑟𝑒 ∗ 𝑠𝑖𝑛(𝜃1 + 𝜃3 ) .
𝛼 = 𝜃1 + 𝜃3
MGI :
𝑥 − 𝑟𝑒 ∗ 𝑐𝑜𝑠(𝛼) = 𝑟2 ∗ 𝑐𝑜𝑠(𝜃1 ) … (1)
{ .
𝑦 − 𝑟𝑒 ∗ 𝑠𝑖𝑛(𝛼) = 𝑟2 ∗ 𝑠𝑖𝑛(𝜃1 ) … (2)
é𝑞(2)
On pose : 𝑥 − 𝑟𝑒 ∗ 𝑐𝑜𝑠(𝛼) = 𝑍1 et 𝑦 − 𝑟𝑒 ∗ 𝑠𝑖𝑛(𝛼) = 𝑍2 , donne : 𝜃1 = atan2 (𝑍2 , 𝑍1 ). Et le
é𝑞(1)
carré et la somme des équations donnent :
𝑟2 = √𝑍1 2 + 𝑍2 2 .
𝜃3 = 𝛼 − 𝜃1 .
Et sachant que : 𝑟𝑒 = 0.35𝑚 et les variables opérationnelles ont pour valeurs : 𝑥 = 1𝑚, 𝑦 = 0.8𝑚, 𝛼 =
60°.
Solution du MGI : 𝑍1 = 𝑥 − 𝑟𝑒 ∗ 𝑐𝑜𝑠(𝛼) = 0.825𝑚 et 𝑍2 = 𝑦 − 𝑟𝑒 ∗ 𝑠𝑖𝑛(𝛼) = 0.496𝑚
𝜃1 = atan 2(𝑍2 , 𝑍1 ) = 31.01°, 𝑟2 = √𝑍1 2 + 𝑍2 2 = 0.962𝑚 et 𝜃3 = 𝛼 − 𝜃1 ≈ 29°
Exercice 02 :
1. Le poignet de ce robot est une rotule (trois axes concourants).
2. Les quatre lignes de DH modifié :
3. Calcul de 0𝑇4 : 0𝑇4 = 0𝑇1 ∗ 1𝑇2 ∗ 2𝑇3 ∗ 3𝑇4 tel que :
cos(𝑞1 ) − sin(𝑞1 ) 0 0 cos(𝑞2 ) − sin(𝑞2 ) 0 𝑑2
) cos(𝑞1 ) 0 0 0
0
𝑇1 = [ sin(𝑞1 0], 1𝑇 = [
2
1 0 ], 2𝑇 =
3
0 0 1 0 −sin(𝑞 2 ) −cos(𝑞 2 ) 0 0
0 0 0 1 0 0 0 1
cos(𝑞3 ) − sin(𝑞3 ) 0 𝑑3 cos(𝑞4 ) − sin(𝑞4 ) 0 0
) cos(𝑞3 ) 0 0 −1 −𝑟4
[ sin(𝑞3 0 0 ], 3
𝑇4 = [ ]
0 0 1 𝑟3 sin(𝑞4 ) cos(𝑞4 ) 0 0
0 0 0 1 0 0 0 1
−𝑠1 𝑠4 + 𝑐4 𝑐1 𝑐23 −𝑐4 𝑠1 −𝑐1 𝑠4 𝑐23 𝑐1 𝑠23 𝑟4 𝑐1 𝑠23 + 𝑑2 𝑐1 − 𝑟3 𝑠1 + 𝑑3 𝑐1 𝑐2
0 𝑐 𝑠 + 𝑐4 𝑠1 𝑐23 𝑐1 𝑐4 − 𝑠4 𝑠1 𝑐23 𝑠1 𝑠23 𝑟4 𝑠1 𝑠23 + 𝑑2 𝑠1 + 𝑟3 𝑐1 + 𝑑3 𝑐2 𝑠1
𝑇4 = [ 1 4 ]
−𝑐4 𝑠23 𝑠4 𝑠23 𝑐23 𝑟4 𝑐23 − 𝑑3 𝑠2
0 0 0 1
4. la position du centre du poignet est donnée par la quatrième colonne (sauf le 1):
𝑃𝑥 𝑟4 𝑐1 𝑠23 + 𝑑2 𝑐1 − 𝑟3 𝑠1 + 𝑑3 𝑐1 𝑐2 𝑐1 (𝑠23 . 𝑟4 + 𝑑2 + 𝑑3 . 𝑐2 ) − 𝑠1 . 𝑟3
𝑃 = [𝑃𝑦 ] = [𝑟4 𝑠1 𝑠23 + 𝑑2 𝑠1 + 𝑟3 𝑐1 + 𝑑3 𝑐2 𝑠1 ] = [𝑠1 (𝑠23 . 𝑟4 + 𝑑2 + 𝑑3 . 𝑐2 ) + 𝑐1 . 𝑟3 ]
𝑃𝑧 𝑟4 𝑐23 − 𝑑3 𝑠2 𝑐23 . 𝑟4 − 𝑑3 . 𝑠2
5. Position pour la configuration zéro géométrique et les paramètres géométriques
𝑑2 , 𝑑3 , 𝑟3 , 𝑟4 :
𝑑2 + 𝑑3 475
𝑃=[ 𝑟3 ] = [ 50 ] 𝑚𝑚
𝑟4 425
6. La position de la pince lorsqu’on choisit le repère de base coïncidant avec la table d’atelier
𝑑2 + 𝑑3 475
et que : 𝑂0 𝑂1 = 𝑑1 = 400𝑚𝑚 : 𝑃 = [ 𝑟3 ] = [ 50 ] 𝑚𝑚
𝑟4 + 𝑑1 825
Vous aimerez peut-être aussi
- PDF AutoDocument37 pagesPDF AutoAbd el moumen HemiciPas encore d'évaluation
- TD1Document1 pageTD1Abd el moumen HemiciPas encore d'évaluation
- Serie n2 Map84Document5 pagesSerie n2 Map84Abd el moumen HemiciPas encore d'évaluation
- NIVEAUDocument6 pagesNIVEAUAbd el moumen HemiciPas encore d'évaluation
- Devoir Robotique MAP2Document8 pagesDevoir Robotique MAP2Abd el moumen HemiciPas encore d'évaluation
- TP 1 CommandeDocument9 pagesTP 1 CommandeAbd el moumen HemiciPas encore d'évaluation
- TP Acm RapportDocument16 pagesTP Acm RapportAbd el moumen HemiciPas encore d'évaluation