Vous aimerez peut-être aussi
- Automatique Linéaire: Ingénieur Biomédicale Instrumentation Et MaintenanceDocument18 pagesAutomatique Linéaire: Ingénieur Biomédicale Instrumentation Et Maintenancetoute chosePas encore d'évaluation
- TD8 - Correction SLDDocument27 pagesTD8 - Correction SLDanna.lux2001Pas encore d'évaluation
- Td5 Regulation IndustrielleDocument8 pagesTd5 Regulation IndustrielleZakaria Bencherki100% (1)
- TPIdentification ET Régulation (ZENDAOUI Elmehdi Gecsi-2)Document10 pagesTPIdentification ET Régulation (ZENDAOUI Elmehdi Gecsi-2)Mehdi ZendaouiPas encore d'évaluation
- 200 Systemes AsservisDocument9 pages200 Systemes AsservistarekocpPas encore d'évaluation
- TD 2 RégulationDocument1 pageTD 2 RégulationÄÿë MënPas encore d'évaluation
- TP1 Asservissement ING1 ISIMMDocument8 pagesTP1 Asservissement ING1 ISIMMlahmar RayenPas encore d'évaluation
- Mai 2015Document6 pagesMai 2015Ali brahim MahamatPas encore d'évaluation
- Le But de TPDocument17 pagesLe But de TPOussama AyrisPas encore d'évaluation
- RappelDocument25 pagesRappelahmad ahmadPas encore d'évaluation
- Exercices Regulation HEI42TCDocument60 pagesExercices Regulation HEI42TCMohamed Ben Fredj79% (14)
- TP01 Régulation de VitesseDocument11 pagesTP01 Régulation de Vitesse3dmotiondzPas encore d'évaluation
- Support Cours Commande Analogique Master Electrotechnique10Document38 pagesSupport Cours Commande Analogique Master Electrotechnique10Nappa NabilPas encore d'évaluation
- 21 PSIEClinrepDocument3 pages21 PSIEClinrepEl kamar-channelPas encore d'évaluation
- TDN°1Document4 pagesTDN°1samad marPas encore d'évaluation
- Cours SALC Ch4Document11 pagesCours SALC Ch4Licence1 espPas encore d'évaluation
- Compte Rendu: Travaux Pratique AutomatiqueDocument14 pagesCompte Rendu: Travaux Pratique AutomatiqueadnaneadnanePas encore d'évaluation
- Cours Thermodynamique 1er PrincipeDocument13 pagesCours Thermodynamique 1er Principemariecurie.academy19Pas encore d'évaluation
- Page de GardeDocument10 pagesPage de GardemarouaPas encore d'évaluation
- Correcteursv3Document9 pagesCorrecteursv3James Clerk MaxwellPas encore d'évaluation
- TP AutomatiqueDocument24 pagesTP AutomatiqueHoussam Haddani100% (1)
- Correction SystemesDocument5 pagesCorrection Systemesnradhy2725Pas encore d'évaluation
- TP1 AutomatiqueDocument29 pagesTP1 AutomatiqueMaryPas encore d'évaluation
- Universite Hassiba Benbouali Du Chlef Faculté de Technologie Département D'ElectrotchniqueDocument5 pagesUniversite Hassiba Benbouali Du Chlef Faculté de Technologie Département D'Electrotchniquechaimaagherbi5Pas encore d'évaluation
- Partiel de Transfert Thermique Du 25 Janvier 2017+corrigéDocument16 pagesPartiel de Transfert Thermique Du 25 Janvier 2017+corrigédallagi mohamed100% (1)
- Les Techniques de RungeDocument5 pagesLes Techniques de RungesalahouchenesalahPas encore d'évaluation
- Compte Rendu D'automatiqueDocument12 pagesCompte Rendu D'automatiqueMOHAMED TAMZAITIPas encore d'évaluation
- TD Automatique 1A JMD 2011Document20 pagesTD Automatique 1A JMD 2011Hajri MohamedPas encore d'évaluation
- TP 2 Version FinaleDocument12 pagesTP 2 Version FinaleZH HamzaPas encore d'évaluation
- Cours SALC ch3Document8 pagesCours SALC ch3Sissy carburePas encore d'évaluation
- TP2 ThermoDocument5 pagesTP2 ThermoKamo ZitoPas encore d'évaluation
- TP1 - Etude Et Programmation Des Systèmes Continus - 2GMDocument7 pagesTP1 - Etude Et Programmation Des Systèmes Continus - 2GMahaweni004Pas encore d'évaluation
- TD Revision Automatique 2022Document4 pagesTD Revision Automatique 2022Oussama ChoukerPas encore d'évaluation
- Binder 1 DDocument39 pagesBinder 1 DKOTCHI kouadio FabricePas encore d'évaluation
- Cours Automatique Des SystèmesDocument6 pagesCours Automatique Des SystèmesIkram El JamaiPas encore d'évaluation
- Travaux Pratiques Automatique.....Document17 pagesTravaux Pratiques Automatique.....MOHAMED TAMZAITIPas encore d'évaluation
- Emd Reg 2014Document7 pagesEmd Reg 2014sana ouferkachPas encore d'évaluation
- Etude de La Regulation de Niveau Sur Le Systeme HydrauliqueDocument6 pagesEtude de La Regulation de Niveau Sur Le Systeme HydrauliqueLaachi AllawaPas encore d'évaluation
- Compte Rendu D'automatique 3Document8 pagesCompte Rendu D'automatique 3omarchrifPas encore d'évaluation
- Republique Algerienne Democratique Et Populaire: Commande AvancéeDocument12 pagesRepublique Algerienne Democratique Et Populaire: Commande AvancéeÎslãm MïmøPas encore d'évaluation
- Rapport Des Travaux PratiquesDocument33 pagesRapport Des Travaux PratiquesYassir EL AYYADIPas encore d'évaluation
- Chapitre 1 SaeDocument7 pagesChapitre 1 SaemedPas encore d'évaluation
- FasciculeTD Chapitre1Document20 pagesFasciculeTD Chapitre1AlaEddineBelhajFrajPas encore d'évaluation
- TD02 Exo3à6 Avec-SolutionDocument4 pagesTD02 Exo3à6 Avec-Solutionchaib draa hadjerPas encore d'évaluation
- Analyse Mathématique pour l'ingénieur: Analyse Mathématique pour l'ingénieur, #2D'EverandAnalyse Mathématique pour l'ingénieur: Analyse Mathématique pour l'ingénieur, #2Pas encore d'évaluation
- Exercices d'intégrales de lignes, de surfaces et de volumesD'EverandExercices d'intégrales de lignes, de surfaces et de volumesPas encore d'évaluation
- PDF AutoDocument37 pagesPDF AutoAbd el moumen HemiciPas encore d'évaluation
- Serie n2 Map84Document5 pagesSerie n2 Map84Abd el moumen HemiciPas encore d'évaluation
- TD1Document1 pageTD1Abd el moumen HemiciPas encore d'évaluation
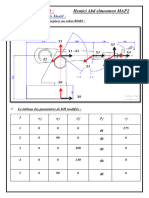
- Devoir Robotique MAP2Document8 pagesDevoir Robotique MAP2Abd el moumen HemiciPas encore d'évaluation
- TP 1 CommandeDocument9 pagesTP 1 CommandeAbd el moumen HemiciPas encore d'évaluation
- TP Acm RapportDocument16 pagesTP Acm RapportAbd el moumen HemiciPas encore d'évaluation
- EXERCICEDocument5 pagesEXERCICEMarius DimaPas encore d'évaluation
- 59 PDFDocument2 pages59 PDFBastien RabierPas encore d'évaluation
- (PFS) (TD) PalanDocument2 pages(PFS) (TD) PalanHachmiPas encore d'évaluation
- Undp CMR Canevas Projet GEF SGP FrançaisDocument13 pagesUndp CMR Canevas Projet GEF SGP Françaisking azPas encore d'évaluation
- Olimpiada Franceza Model SubiectDocument17 pagesOlimpiada Franceza Model SubiectD.IPas encore d'évaluation
- Paul Ballanfat - Ivresse de La Mort Dans Le Discours Mystique Et Fondements Du ParadoxeDocument32 pagesPaul Ballanfat - Ivresse de La Mort Dans Le Discours Mystique Et Fondements Du ParadoxeNikola PantićPas encore d'évaluation
- CAO - FAO À 5 Axes (Partie2)Document295 pagesCAO - FAO À 5 Axes (Partie2)Hanane TounsiPas encore d'évaluation
- EBOOK Melanie Milburne - Le Souffle de La Passion PDFDocument84 pagesEBOOK Melanie Milburne - Le Souffle de La Passion PDFLaali Christy67% (3)
- Les Question QCM Management Strategique P. JaouhariDocument7 pagesLes Question QCM Management Strategique P. JaouhariSiham AkachoudPas encore d'évaluation
- Approches Theoriques en Analyse de Polit PDFDocument34 pagesApproches Theoriques en Analyse de Polit PDFJean KoffiPas encore d'évaluation
- MonEtiquetteRetour NA2305191713144 2Document2 pagesMonEtiquetteRetour NA2305191713144 2HADANGUE ChristopherPas encore d'évaluation
- Interphonie & Vidéophonie, Halima FerganiDocument23 pagesInterphonie & Vidéophonie, Halima Ferganifergani100% (1)
- Les Génies de La Science (Vol1) - DarwinDocument98 pagesLes Génies de La Science (Vol1) - Darwinuser scribdPas encore d'évaluation
- Procedures D'executionDocument30 pagesProcedures D'executionVirane DantonPas encore d'évaluation
- Book PBCF FR WebDocument70 pagesBook PBCF FR WebMorgane patrick EffoutamePas encore d'évaluation
- Guide en 4 Étapes Pour Rejoindre DIGICALL PARTNERDocument1 pageGuide en 4 Étapes Pour Rejoindre DIGICALL PARTNERalaesahbouPas encore d'évaluation
- Voigtlander Vito B-FrenchDocument33 pagesVoigtlander Vito B-FrenchCristina LonardoniPas encore d'évaluation
- Le Marketing Social: Un Oxymore Qui A Du Sens ? : Module Interprofessionnel de Santé PubliqueDocument40 pagesLe Marketing Social: Un Oxymore Qui A Du Sens ? : Module Interprofessionnel de Santé PubliqueMeryam MeryPas encore d'évaluation
- Activites Du CommissionnaireDocument67 pagesActivites Du CommissionnaireRIHANI MohamedPas encore d'évaluation
- Asturias Leyenda AlbenizDocument7 pagesAsturias Leyenda AlbenizRavodPas encore d'évaluation
- 7a - Note D'information Accueil Au Restaurant Scolaire 2022 2023Document2 pages7a - Note D'information Accueil Au Restaurant Scolaire 2022 2023cpd boualitPas encore d'évaluation
- CPS D'achevement Lot 09Document169 pagesCPS D'achevement Lot 09Abdellah MarniPas encore d'évaluation
- Limites Et Continuite Exercices Non Corriges 1 5Document2 pagesLimites Et Continuite Exercices Non Corriges 1 5Ali KhatibmknsPas encore d'évaluation
- Contrat Type ArchitecteDocument19 pagesContrat Type ArchitecteAdel ShatlaPas encore d'évaluation
- Cours 2Document25 pagesCours 2jpPas encore d'évaluation
- Pedagogie 1Document6 pagesPedagogie 1gerard1993Pas encore d'évaluation
- Bulletin Kine N°25Document32 pagesBulletin Kine N°25Arzhel MideletPas encore d'évaluation
- Memo Lean Six SigmaDocument1 pageMemo Lean Six SigmamehdiPas encore d'évaluation
- Métier de FormationDocument2 pagesMétier de FormationRanto Andriampenitra RasoamanambolaPas encore d'évaluation
- ATOUTS - Difficultes Du GabonDocument1 pageATOUTS - Difficultes Du GabonmbimbodevdasPas encore d'évaluation