Vous aimerez peut-être aussi
- Bien débuter avec SQL: Exercices dans l'interface PhpMyAdmin et MySQLD'EverandBien débuter avec SQL: Exercices dans l'interface PhpMyAdmin et MySQLPas encore d'évaluation
- Cours AngularDocument44 pagesCours Angularyosri grira100% (1)
- TD1 CorrectionDocument9 pagesTD1 CorrectionVivo Vivoo VI71% (7)
- ParetoDocument13 pagesParetoIkram El GhazouaniPas encore d'évaluation
- Top Ten 50Document35 pagesTop Ten 50Beppe SorboPas encore d'évaluation
- CH 01 - Complexité AlgorithmiqueDocument6 pagesCH 01 - Complexité AlgorithmiqueDjalel HemidiPas encore d'évaluation
- TD Architecture PDFDocument18 pagesTD Architecture PDFatig khaoulaPas encore d'évaluation
- Alimentations StatiquesDocument16 pagesAlimentations StatiquesKdr Khair-Eddine100% (1)
- Cours Systemes de Transmission de MouvementDocument5 pagesCours Systemes de Transmission de MouvementdjalikadjouPas encore d'évaluation
- RtosDocument12 pagesRtosPer PersoPas encore d'évaluation
- TD1 CorrectionDocument6 pagesTD1 CorrectionHoussem1993100% (1)
- Systemes Dexploitation Chapitre2 Gestion ProcessusDocument32 pagesSystemes Dexploitation Chapitre2 Gestion ProcessusGEEKGHAZIPas encore d'évaluation
- Cours Temps ReelDocument22 pagesCours Temps ReelNicolas SirtakysPas encore d'évaluation
- COURS Systemes Embarques PDFDocument33 pagesCOURS Systemes Embarques PDFseye abdou azizPas encore d'évaluation
- CCNA 02 Introduction À l'IOSDocument138 pagesCCNA 02 Introduction À l'IOSyikhlefPas encore d'évaluation
- Cours 5 - Algo Distribué-OrdonnancementDocument18 pagesCours 5 - Algo Distribué-Ordonnancementdhm med tiyibePas encore d'évaluation
- TP 1 StructureDocument4 pagesTP 1 Structureahmed fahssiPas encore d'évaluation
- Rtos QuestionsDocument12 pagesRtos QuestionsManissa BelaliaPas encore d'évaluation
- Chap2 SE ProcessusDocument34 pagesChap2 SE Processusمسيطر AraPas encore d'évaluation
- Rts TPDocument31 pagesRts TPMarc NdanjiPas encore d'évaluation
- Chapitre 2 - Introduction RtosDocument9 pagesChapitre 2 - Introduction RtoselmcadbuickPas encore d'évaluation
- DSP BIOS (Mode de Compatibilité)Document53 pagesDSP BIOS (Mode de Compatibilité)Maria Lahmari0% (1)
- Chapitre 2 CSTR 2019-2020Document26 pagesChapitre 2 CSTR 2019-2020Ahmed BnziPas encore d'évaluation
- Moussa Ado SimulatorDocument24 pagesMoussa Ado SimulatorAbdel GansonrePas encore d'évaluation
- TP1 CTRDocument4 pagesTP1 CTRYoussouf gairanPas encore d'évaluation
- Fiche TD N°1Document5 pagesFiche TD N°1sadl urhPas encore d'évaluation
- CorrectionDocument3 pagesCorrectionfaridboularbihPas encore d'évaluation
- TD Complet Reseau2 1112Document15 pagesTD Complet Reseau2 1112Salah Gharbi100% (1)
- Chapitre N°03-1-1Document15 pagesChapitre N°03-1-1Youssouf gairanPas encore d'évaluation
- L'Optimisation Des Ordres SQLDocument11 pagesL'Optimisation Des Ordres SQLYahia HamichePas encore d'évaluation
- TP1 5Document15 pagesTP1 5Salsec ZombrePas encore d'évaluation
- Système D'exploitationDocument16 pagesSystème D'exploitationDiarnou FayePas encore d'évaluation
- MpsDocument214 pagesMpsHousem Eddine BenjemaaPas encore d'évaluation
- Résumé LinuxDocument10 pagesRésumé LinuxAdel 22Pas encore d'évaluation
- Ao 5Document18 pagesAo 5houriaPas encore d'évaluation
- Conceptin de Processeur Partie Operative 1Document33 pagesConceptin de Processeur Partie Operative 1rimamkkPas encore d'évaluation
- 5 AlgorithmiqueDocument14 pages5 AlgorithmiqueHilaire AgboPas encore d'évaluation
- CM - Automatisme Et Info Ind - 2020 - Chap 1Document24 pagesCM - Automatisme Et Info Ind - 2020 - Chap 1Tchapdie Bris100% (1)
- Algorithmique S1 LMD - 080512Document74 pagesAlgorithmique S1 LMD - 080512joyskanekPas encore d'évaluation
- Liste Chainee Et Arbre BinaireDocument1 pageListe Chainee Et Arbre BinaireTchouata BidiasPas encore d'évaluation
- ORDONNANCEMMENTDocument16 pagesORDONNANCEMMENTBoris Meva'aPas encore d'évaluation
- ReadmeDocument15 pagesReadmeMed MadridPas encore d'évaluation
- Algorithme AvancéDocument70 pagesAlgorithme AvancéSalah Ben Salha0% (1)
- Chapitre 1 PDFDocument31 pagesChapitre 1 PDFdonePas encore d'évaluation
- TD Complet Reseau2 1314Document15 pagesTD Complet Reseau2 1314Georges Le Mignon OlePas encore d'évaluation
- Chap2 VonNeumann PDFDocument40 pagesChap2 VonNeumann PDFGhassen OuniPas encore d'évaluation
- Sujets T DTPDocument126 pagesSujets T DTPAbdellatif FarzouzPas encore d'évaluation
- Temps Réel Chp1Document29 pagesTemps Réel Chp1CAMPUS TIZI OUZOUPas encore d'évaluation
- SE2 Partie 1Document61 pagesSE2 Partie 1Mamado BogadoPas encore d'évaluation
- Cours DSP AB AsmDocument23 pagesCours DSP AB AsmIly'as En-naouiPas encore d'évaluation
- RTOSDocument20 pagesRTOSAlouani KacemPas encore d'évaluation
- Composant de Routeur PDFDocument37 pagesComposant de Routeur PDFrokspoofPas encore d'évaluation
- Chapitre I - Introduction GeneraleDocument11 pagesChapitre I - Introduction Generale1c21f2407fPas encore d'évaluation
- CORRECTION Informatique Sujet 1 NEWDocument4 pagesCORRECTION Informatique Sujet 1 NEWAlida DONGMOPas encore d'évaluation
- Sys Exp-Chapitre2Document8 pagesSys Exp-Chapitre2Oussema ChattiPas encore d'évaluation
- Résumé SSIDocument23 pagesRésumé SSIbeautiful mindPas encore d'évaluation
- Cours2 ADODocument29 pagesCours2 ADOkarimslayer7Pas encore d'évaluation
- Chapitre 2Document8 pagesChapitre 2oscarPas encore d'évaluation
- Chapitre 7GPDocument5 pagesChapitre 7GPBadr EdouhabiPas encore d'évaluation
- Presentation STATADocument14 pagesPresentation STATAmoussamamadouPas encore d'évaluation
- TP C54 PDFDocument18 pagesTP C54 PDFSanou BougharriouPas encore d'évaluation
- Travaux PratiquesDocument18 pagesTravaux PratiquesSolomane KanéPas encore d'évaluation
- Les Systemes Temps Reels Cours M2 Auto. & Sys. 2022Document22 pagesLes Systemes Temps Reels Cours M2 Auto. & Sys. 2022Yarin AmounaPas encore d'évaluation
- Ordonncement 2021 2022 Chapitre 1Document57 pagesOrdonncement 2021 2022 Chapitre 1Rä Høuba100% (1)
- Python pour Débutants : Guide Complet pour Apprendre la Programmation Pas à PasD'EverandPython pour Débutants : Guide Complet pour Apprendre la Programmation Pas à PasPas encore d'évaluation
- CompteDocument5 pagesCompteaziz exp00Pas encore d'évaluation
- Théorie Des Langages Et Automates Série de TD N°4: Exercice 1Document2 pagesThéorie Des Langages Et Automates Série de TD N°4: Exercice 1aziz exp00Pas encore d'évaluation
- TP1 GuideDocument14 pagesTP1 Guideaziz exp00Pas encore d'évaluation
- Théorie Des Langages Et Automates Série de TD N°3: Exercice 1Document2 pagesThéorie Des Langages Et Automates Série de TD N°3: Exercice 1aziz exp00Pas encore d'évaluation
- c4 PDFDocument33 pagesc4 PDFHajer Naas Ep KasraouiPas encore d'évaluation
- CompteDocument5 pagesCompteaziz exp00Pas encore d'évaluation
- Bda-SqlDocument91 pagesBda-Sqlaziz exp00Pas encore d'évaluation
- Adobe Scan 12 Juin 2021 1Document6 pagesAdobe Scan 12 Juin 2021 1aziz exp00Pas encore d'évaluation
- TP #01: Création D'une Base Des DonnéesDocument4 pagesTP #01: Création D'une Base Des Donnéesaziz exp00Pas encore d'évaluation
- Adobe Scan 12 Juin 2021 1Document6 pagesAdobe Scan 12 Juin 2021 1aziz exp00Pas encore d'évaluation
- C.rendu tp1 C++Document7 pagesC.rendu tp1 C++aziz exp00Pas encore d'évaluation
- POOChapi 1Document39 pagesPOOChapi 1Marwen HihiPas encore d'évaluation
- TP BD 2022Document8 pagesTP BD 2022aziz exp00Pas encore d'évaluation
- Bda-SqlDocument91 pagesBda-Sqlaziz exp00Pas encore d'évaluation
- TP BD 2022Document8 pagesTP BD 2022aziz exp00Pas encore d'évaluation
- TP BD 2022Document8 pagesTP BD 2022aziz exp00Pas encore d'évaluation
- TP BD 2022Document8 pagesTP BD 2022aziz exp00Pas encore d'évaluation
- TP BD 2022Document8 pagesTP BD 2022aziz exp00Pas encore d'évaluation
- Bda-SqlDocument91 pagesBda-Sqlaziz exp00Pas encore d'évaluation
- Bda-SqlDocument91 pagesBda-Sqlaziz exp00Pas encore d'évaluation
- Bda-SqlDocument91 pagesBda-Sqlaziz exp00Pas encore d'évaluation
- TP BD 2022Document8 pagesTP BD 2022aziz exp00Pas encore d'évaluation
- Bda-SqlDocument91 pagesBda-Sqlaziz exp00Pas encore d'évaluation
- Cours Probabilités (Chapitre 1 - Analyse Combinatoire)Document41 pagesCours Probabilités (Chapitre 1 - Analyse Combinatoire)Khadija Dia100% (1)
- MEMOIRE Samer MoussaDocument94 pagesMEMOIRE Samer Moussatoni JabbourPas encore d'évaluation
- Pvsyst Evaluation: Pvsyst - Rapport de SimulationDocument7 pagesPvsyst Evaluation: Pvsyst - Rapport de Simulationidriss habibiPas encore d'évaluation
- Bascules SynchronesDocument7 pagesBascules SynchronesMohamed Ben FredjPas encore d'évaluation
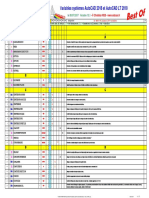
- Variables Systemes AutoCAD 2Mxx-BEST of VARIABLESDocument7 pagesVariables Systemes AutoCAD 2Mxx-BEST of VARIABLESazePas encore d'évaluation
- Matematica În Egipul Antic FR 3Document3 pagesMatematica În Egipul Antic FR 3Valeriu TurcanuPas encore d'évaluation
- Mem Corr AndriantavyDocument66 pagesMem Corr AndriantavyWael TrabelsiPas encore d'évaluation
- 0-Rappel Langage SQLDocument4 pages0-Rappel Langage SQLaminehosnyPas encore d'évaluation
- Examen National Du BTS - Maintenance Industrielle - Session de Mai 2015Document4 pagesExamen National Du BTS - Maintenance Industrielle - Session de Mai 2015enjy top1Pas encore d'évaluation
- cm2 Exercices SymetrieDocument4 pagescm2 Exercices Symetriegjx7qcfwmyPas encore d'évaluation
- PLE CoursDocument95 pagesPLE CoursFranck-Olivier KassouPas encore d'évaluation
- Crabol XXIV-3Document2 pagesCrabol XXIV-3Pham Van DuongPas encore d'évaluation
- ADE - UHA 2022-2023 (Alioune-Badara-Ibn - Diene@uha - FR) - 6.6.4jDocument1 pageADE - UHA 2022-2023 (Alioune-Badara-Ibn - Diene@uha - FR) - 6.6.4jAlioune Badara Ibn Abu Talib DiènePas encore d'évaluation
- Enrobage EC2Document7 pagesEnrobage EC2Abdelkader Drr100% (1)
- Beer - Méthode de Clarinette (1891)Document60 pagesBeer - Méthode de Clarinette (1891)fabri21Pas encore d'évaluation
- Cours Matlab 2020Document55 pagesCours Matlab 2020soufianealjahid523Pas encore d'évaluation
- Examen1+Solution Microcontrà Leurs Et Microprocesseurs - PDF  Version 1Document4 pagesExamen1+Solution Microcontrà Leurs Et Microprocesseurs - PDF  Version 1Chaima BellatPas encore d'évaluation
- TP BDV 2016Document17 pagesTP BDV 2016Khabtane AbdelhamidPas encore d'évaluation
- NPS - VPN Sous Windows2012 ServerDocument19 pagesNPS - VPN Sous Windows2012 ServerAKUEPas encore d'évaluation
- Ifr AttDocument9 pagesIfr AttpatrouilledeafrancePas encore d'évaluation
- Travaux Dirigés - TD - ArbresDocument2 pagesTravaux Dirigés - TD - Arbresلا إلٰه إلّا اللهPas encore d'évaluation
- TP 2 InstrumentationDocument6 pagesTP 2 Instrumentationrami kafiPas encore d'évaluation
- 1-html CssDocument88 pages1-html CssSouleymane TraorePas encore d'évaluation
- TP E P RedresseurDocument5 pagesTP E P RedresseurRafik BouhennachePas encore d'évaluation