Académique Documents
Professionnel Documents
Culture Documents
Socheleau Manuscrit El
Transféré par
ami_chtiTitre original
Copyright
Formats disponibles
Partager ce document
Partager ou intégrer le document
Avez-vous trouvé ce document utile ?
Ce contenu est-il inapproprié ?
Signaler ce documentDroits d'auteur :
Formats disponibles
Socheleau Manuscrit El
Transféré par
ami_chtiDroits d'auteur :
Formats disponibles
Ndordre : 2011telb0197
S So ou us s l le e s sc ce ea au u d de e l l U Un ni iv ve er rs si it t e eu ur ro op p e en nn ne e d de e B Br re et ta ag gn ne e
Tlcom Bretagne
En habilitation conjointe avec lUniversit de Bretagne Occidentale
Ecole Doctorale sicma
Communications acoustiques sous-marines sur canal fortement
dispersif en temps et en frquence :
point de vue de la thorie de l'information
Thse de Doctorat
Mention : Sciences et Technologies de lInformation et de la Communication
Prsente par Franois-Xavier Socheleau
Dpartement : Signal et Communications
Laboratoire : UMR CNRS 3192 Lab-STICC
Directeur de thse : Christophe Laot
Jury :
Prsident M. Didier Le Ruyet, Professeur, Conservatoire National des Arts et Mtiers
Rapporteurs M. Mrouane Debbah, Professeur, Ecole Suprieure dElectricit
M. Joo Pedro Gomes, Matre de confrences, Instituto Superior Tcnico
Examinateurs M. Gilles Burel, Professeur, Universit de Bretagne Occidentale
M. Christophe Laot, Matre de confrences, Tlcom Bretagne
M. Jean-Michel Passerieux, Ingnieur expert sonar, Thales Underwater
Systems
Invit M. Nicolas Beuzelin, Expert systmes de tlcommunication sous-marins,
DGA Techniques Navales
t
e
l
-
0
0
6
3
8
8
3
6
,
v
e
r
s
i
o
n
1
-
7
N
o
v
2
0
1
1
t
e
l
-
0
0
6
3
8
8
3
6
,
v
e
r
s
i
o
n
1
-
7
N
o
v
2
0
1
1
Cette thse a t prpare TlcomBretagne au sein du dpartement Signal et Com-
munications (UMR CNRS 3192 Lab-STICC) et Thales Underwater Systems au sein du
service des Etudes Gnrales Sonar de novembre 2008 octobre 2011. Une partie des tra-
vaux prsents dans ce manuscrit est issue dune collaboration avec le professeur Stoja-
novic de Northeastern University, Boston, USA.
Cette thse Cifre a t co-nance par Thales Underwater Systems et lANRT. Ce travail
a galement t soutenu par le GESMA (Groupes dEtudes Sous-Marines de lAtlantique)
qui a fourni une partie des donnes relles exploites dans ce manuscrit.
t
e
l
-
0
0
6
3
8
8
3
6
,
v
e
r
s
i
o
n
1
-
7
N
o
v
2
0
1
1
t
e
l
-
0
0
6
3
8
8
3
6
,
v
e
r
s
i
o
n
1
-
7
N
o
v
2
0
1
1
Remerciements
Je tiens tout dabord exprimer ma profonde reconnaissance envers Christophe Laot
et Jean-Michel Passerieux pour la qualit de leur encadrement tout au long de cette thse.
Leur disponibilit, la pertinence de leurs conseils, leur culture scientique, le partage de
leur exprience, leur conance et leur soutien mont t trs prcieux aux cours de ces
trois dernires annes.
Je remercie vivement Didier Le Ruyet pour mavoir fait lhonneur de prsider mon jury
de thse ainsi que Gilles Burel et Nicolas Beuzelin pour y avoir particip. Je remercie ga-
lement les rapporteurs Mrouane Debbah et Joao Pedro Gomes pour le soin quils ont
apport la lecture et lvaluation de ce manuscrit.
Je souhaite aussi remercier Milica Stojanovic pour mavoir accueilli dans son labora-
toire Northeastern University.
Ces annes passes TlcomBretagne ont aussi t loccasionde dvelopper des col-
laborations fructueuses sur des sujets scientiques divers. Jassocie pleinement ces re-
merciements Sbastien Houcke, Abdeldjalil Assa-El-Bey et Mohamed Rabie Oularbi avec
qui jai collabor sur des problmes de dtection en radio-cognitive, Dominique Pastor
qui a trs fortement inuenc ma visiondes statistiques robustes et de la parcimonie ainsi
que Samir Saoudi sans qui je naurais putre initi auconcept ducinquime quart-temps.
Enn, je noublie pas tous les membres de lquipe EGS de Thales ainsi que ceux du
dpartement Signal & Communications de Tlcom Bretagne que je remercie pour leur
bonne humeur quotidienne qui contribue crer une excellente atmosphre de travail.
t
e
l
-
0
0
6
3
8
8
3
6
,
v
e
r
s
i
o
n
1
-
7
N
o
v
2
0
1
1
t
e
l
-
0
0
6
3
8
8
3
6
,
v
e
r
s
i
o
n
1
-
7
N
o
v
2
0
1
1
Rsum
Le canal acoustique sous-marin (ASM) est rput comme difcile. Il prsente la fois
des effets de rexion/rfraction gnrant de la dispersion temporelle importante, une
attnuation fortement croissante avec la frquence qui restreint la bande-passante dis-
ponible, ainsi quune forte variabilit du milieu, qui, combine avec une faible clrit
des ondes acoustiques, induit une dispersion frquentielle consquente.
Contrairement la recherche dans le domaine des radio-communications qui repose
principalement sur des modles de propagations bien tablis, la recherche en commu-
nication ASM ne dispose pas de tels modles et sappuie majoritairement sur des expri-
mentations en mer.
Lobjectif principal de ce travail de thse est de montrer que malgr notre connais-
sance limite sur la ralit physique du canal, il est possible, en utilisant des outils tho-
riques adapts, de dterminer en laboratoire des directives pertinentes aussi bien pour la
slection des modulations et la validation des modems correspondants que pour les pr-
dictions de dbit. Dans ce contexte, la thorie de linformation savre tre un outil trs
prcieux pour infrer un maximum de conclusions sur le canal et induire des directives
pratiques sur les formats de modulation.
Nous dveloppons dans un premier temps un point de vue de thorie de linformation
sur la modlisation de canaux acoustiques sous-marins doublement dispersifs en sap-
puyant sur le principe dentropie maximale. Dans un cadre dinfrence plus empirique,
nous proposons ensuite un modle de canal aliment par des donnes relles qui repose
sur lhypothse selon laquelle une rponse impulsionnelle de canal mesure en mer
nest quune observation dun processus alatoire sous-jacent. Nous drivons dans un
troisime temps de nouvelles bornes de capacit sur le canal ASM en considrant des
hypothses plus ralistes que ltat de lart sur le sujet : le canal est ici suppos double-
ment dispersif, la puissance crte limite et la ralisation courante du canal inconnue
de lmetteur et du rcepteur (contexte non-cohrent). Enn, nous nous intressons la
structure propre du canal et cherchons optimiser la forme donde de transmission
pour trouver un bon compromis entre les notions trs intriques de robustesse et de
dbit qui caractrisent les performances des systmes de communication.
Mots cls
Communications acoustiques sous-marines, thorie de linformation, modlisation de
canal
t
e
l
-
0
0
6
3
8
8
3
6
,
v
e
r
s
i
o
n
1
-
7
N
o
v
2
0
1
1
t
e
l
-
0
0
6
3
8
8
3
6
,
v
e
r
s
i
o
n
1
-
7
N
o
v
2
0
1
1
Abstract
The underwater acoustic channel (UAC) is knownto be a difcult communicationme-
dium. It generates signicant temporal dispersion due to the effects of reection and re-
fraction, its attenuation strongly increases with the frequency, which limits the available
bandwidth, and its strong variability combined with the low speed of acoustic waves in-
duces substantial frequency dispersion.
Unlike research in the eld of radio communications that relies primarily on well-
established propagation models, research in underwater acoustic communications does
not have such models and is mostly based on sea trials.
The main objective of this thesis is to show that despite our limited knowledge on
the physical reality of the channel, it is possible, using appropriate theoretical tools, to
determine in laboratory relevant guidelines for the selection of modulations and the va-
lidation of corresponding modems, as well as for the prediction of achievable data rates.
In this context, information theory proves to be a valuable tool to infer a maximum of
conclusions on the channel and induce practical guidelines on the design of transmis-
sion schemes.
We rst develop an information theoretic viewpoint on doubly dispersive UAC
modeling that relies on the principle of maximumentropy. In a more empirical inference
framework, we then propose a channel model driven by real data that is based on the
assumptionthat a channel impulse response measuredat sea is a single observationof an
underlying random process. Third, we derive new bounds on the capacity of underwater
acoustic channels and consider more realistic assumptions than the state-of-the-art on
that topic : the channel is assumed to be doubly dispersive, the average-power and the
peak-power of the input signal are assumed to be nite, and neither the transmitter nor
the receiver knows the current realization of the channel (non-coherent setting). Finally,
we focus on the eigen structure of the channel and seek to optimize the signalling scheme
in order to nd a good compromise between the intertwined notions of reliability and
data rate that characterize the performance of communication systems.
Keywords
Underwater acoustic communications, information theory, channel modeling
t
e
l
-
0
0
6
3
8
8
3
6
,
v
e
r
s
i
o
n
1
-
7
N
o
v
2
0
1
1
t
e
l
-
0
0
6
3
8
8
3
6
,
v
e
r
s
i
o
n
1
-
7
N
o
v
2
0
1
1
Table des matires
Remerciements iii
Rsum v
Abstract vii
Table des matires xi
Acronymes xiii
Notations xv
Introduction gnrale 1
I Modlisation du canal 5
Introduction 7
1 Gnralits sur le milieu de propagation acoustique sous-marin 13
1.1 Physique du milieu . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
1.1.1 Clrit de londe acoustique . . . . . . . . . . . . . . . . . . . . . . . . 13
1.1.2 Equation donde et thorie des rayons . . . . . . . . . . . . . . . . . . 14
1.1.3 Pertes de propagation . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
1.1.4 Variabilit de lenvironnement . . . . . . . . . . . . . . . . . . . . . . . 18
1.1.5 Bruit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
1.2 Implications des particularits du milieu sur les communications . . . . . . 19
1.2.1 Environnement petit fond et dispersion temporelle . . . . . . . . . . . 19
1.2.2 Bande passante disponible . . . . . . . . . . . . . . . . . . . . . . . . . 20
1.2.3 Compression/dilatationDoppler . . . . . . . . . . . . . . . . . . . . . . 21
1.2.4 Dispersion frquentielle . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
t
e
l
-
0
0
6
3
8
8
3
6
,
v
e
r
s
i
o
n
1
-
7
N
o
v
2
0
1
1
x TABLE DES MATIRES
1.3 Modle de transmission . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
1.3.1 Oprateur canal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
1.3.2 Canal alatoire et hypothse WSSUS . . . . . . . . . . . . . . . . . . . 23
1.3.3 Approximation bande troite . . . . . . . . . . . . . . . . . . . . . . . . 24
1.3.4 Modle discret quivalent en bande de base . . . . . . . . . . . . . . . 26
1.3.5 Exemple de canaux rels . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
2 Modle de canal entropie maximale 31
2.1 Principe dentropie maximale . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
2.2 Modlisation de la densit de probabilit du canal . . . . . . . . . . . . . . . 32
2.2.1 Modle gaussien . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
2.2.2 Paramtres incertains . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
2.3 Modlisation des uctuations temporelles du canal . . . . . . . . . . . . . . . 35
2.4 Illustrations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
2.4.1 Comparaison avec des donnes relles . . . . . . . . . . . . . . . . . . 39
2.4.2 Limitations du modle . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
3 Rejeu stochastique de canal 45
3.1 Infrence empirique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
3.1.1 Canal stationnaire en tendance . . . . . . . . . . . . . . . . . . . . . . . 45
3.1.2 Densit de probabilit du canal . . . . . . . . . . . . . . . . . . . . . . 49
3.2 Corrlations entre trajets et rejeu . . . . . . . . . . . . . . . . . . . . . . . . . . 52
3.3 Illustrations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
Conclusion 57
II Capacit du canal et optimisation du schma de signalisation 59
Introduction 61
4 Sur la capacit du canal acoustique sous-marin 65
4.1 Sur la capacit non-cohrente . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
4.2 Modle de transmission . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
4.3 Bornes de capacit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
4.3.1 Dnition de la capacit non-cohrente . . . . . . . . . . . . . . . . . 70
4.3.2 Bornes suprieures . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
4.3.3 Borne infrieure . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73
t
e
l
-
0
0
6
3
8
8
3
6
,
v
e
r
s
i
o
n
1
-
7
N
o
v
2
0
1
1
TABLE DES MATIRES xi
4.4 Illustrations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74
4.4.1 Evaluation des bornes de capacit sur canaux synthtiques . . . . . . 75
4.4.2 Evaluation des bornes de capacit sur un canal rel . . . . . . . . . . . 76
5 Sur loptimisation du schma de signalisation 81
5.1 Structure singulire du canal et signalisation de Weyl-Heisenberg . . . . . . 81
5.1.1 Diagonalisation approche . . . . . . . . . . . . . . . . . . . . . . . . . 81
5.1.2 Signalisation de Weyl-Heisenberg . . . . . . . . . . . . . . . . . . . . . 82
5.1.3 Compromis interfrence-efcacit spectrale . . . . . . . . . . . . . . . 84
5.2 Optimisation de puissance . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91
5.2.1 Motivations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91
5.2.2 Schma de Weyl-Heisenberg contraint en puissance crte . . . . . . . 93
5.2.3 Sur ltalement du canal de transmission . . . . . . . . . . . . . . . . . 95
5.2.4 Optimisation de puissance sur des canaux sous-tals . . . . . . . . . 96
5.2.5 valuation numrique pour les canaux sous-tals . . . . . . . . . . . 99
5.2.6 Directives de conception . . . . . . . . . . . . . . . . . . . . . . . . . . 106
5.2.7 Cas des canaux sur-tals . . . . . . . . . . . . . . . . . . . . . . . . . . 106
Conclusion 109
Conclusion gnrale et perspectives 111
A Solution numrique de lquation(2.19) 127
B Dcomposition modale empirique 129
C Dtails sur la preuve du thorme 4.3.2 131
C.1 Calcul de lim
N
1
N
logdet
y
. . . . . . . . . . . . . . . . . . . . . . . . . . . . 131
C.2 Calcul de lim
N
1
N
logdet
y|x
. . . . . . . . . . . . . . . . . . . . . . . . . . . 132
D Dtails sur la preuve du thorme 4.3.3 133
E Bornes sur le rapport signal sur interfrence 137
t
e
l
-
0
0
6
3
8
8
3
6
,
v
e
r
s
i
o
n
1
-
7
N
o
v
2
0
1
1
t
e
l
-
0
0
6
3
8
8
3
6
,
v
e
r
s
i
o
n
1
-
7
N
o
v
2
0
1
1
Acronymes
Pour des raisons de lisibilit, la signicationdune abrviationou dun acronyme nest
souvent rappele qu sa premire apparition dans le texte dun chapitre. Par ailleurs,
puisque nous utilisons toujours labrviation la plus usuelle, il est frquent que ce soit le
terme anglais qui soit employ.
AFD Average Fade Duration
ASM Acoustique Sous-Marin(e)
AUV Autonomous Underwater Vehicle
CSI Channel State Information
d.d.p densit de probabilit
EMD Empirical Mode Decomposition
i.i.d indpendant et identiquement distribu
KL Kullback-Leibler
LCR Level Crossing Rate
MIMO Multiple Input Multiple Output
MMSE MinimumMean Square Error
NMSE Normalized Mean Square Error
OFDM Orthogonal Frequency Division Multiplexing
OTI Out-of-band Tone Insertion
PAPR Peak-to-Average Power Ratio
rms root mean square
RX Rcepteur
SINDR Signal-to-Interference plus Noise plus Distortion Ratio
SINR Signal-to-Interference plus Noise Ratio
SIR Signal-to-Interference Ratio
SISO Single Input Single Output
SNDR Signal-to-Noise plus Distortion Ratio
SNR Signal-to-Noise Ratio
TEB Taux dErreur Binaire
TX Emetteur
WH Weyl-Heisenberg
WSSUS Wide-Sense Stationary and Uncorrelated Scattering
t
e
l
-
0
0
6
3
8
8
3
6
,
v
e
r
s
i
o
n
1
-
7
N
o
v
2
0
1
1
t
e
l
-
0
0
6
3
8
8
3
6
,
v
e
r
s
i
o
n
1
-
7
N
o
v
2
0
1
1
Notations
Nous avons regroup ci-dessous les principales notations employes dans les diff-
rents chapitres du document. Dans la mesure du possible, nous avons tent de conserver
les mmes notations dun chapitre lautre.
x vecteur
A matrice
()
T
transpos
()
conjugu
()
transpos et conjugu
produit de Hadamard
[]
k,l
lment de la k-ime ligne et l -ime colonne dune matrice
I
N
matrice identit N N
1
N
vecteur N 1 dont les lments sont gaux 1
D(x) matrice diagonale contenant les lments du vecteur x
x
l
vecteur x de dimension N1 dont les Nl premiers lments ont t
dcals l fois vers le bas et o les l premiers sont ensuite mis zros
F
norme de Frobenius
norme euclidienne
tr() trace
E{} esprance mathmatique
CN (m, R) distributiondunvecteur gaussiencirculaire de moyenne met de ma-
trice de covariance R
partie relle
partie imaginaire
argument dun nombre complexe
| | module
y, z produit scalaire entre y(t ) et z(t ) tel que y, z =
_
+
y(t )z
(t )dt
() distribution de Dirac
oprateur nabla
oprateur laplacien
L
2
(R) espace de Hilbert des fonctions de carr intgrable
H oprateur canal
h
H
(, t ) rponse impulsionnelle du canal
G
H
(, ) fonction dtalement du canal
S
H
(, ) fonction de diffusion du canal
t
e
l
-
0
0
6
3
8
8
3
6
,
v
e
r
s
i
o
n
1
-
7
N
o
v
2
0
1
1
t
e
l
-
0
0
6
3
8
8
3
6
,
v
e
r
s
i
o
n
1
-
7
N
o
v
2
0
1
1
Introduction gnrale
Motivations et contexte de ltude
La capacit communiquer efcacement sous leau sans liaisonlaire revt unintrt
majeur pour de nombreuses applications lies lanalyse, lexploration ou lexploitation
du milieu sous-marin. La transmission de donnes ocanographiques par des observa-
toires immergs, la commande de robots sous-marins tloprs, le positionnement de
systmes se dplaant dans les fonds marins ou lenvoi de messages entre un sous-marin
et un btiment de surface en sont quelques exemples particuliers [Lurton, 2011; Juhel,
2005]. Alors que la conductivit lectrique de leau limite trs fortement la propagation
des ondes radio-lectriques et que les ondes optiques souffrent de la diffusion induite
par les htrognits du milieu marin, londe acoustique savre tre le support le mieux
adapt la transmission dinformation sur de longues distances.
Les modems acoustiques commercialiss de nos jours oprent principalement dans
des gammes de frquences allant de quelques centaines de hertz plusieurs dizaines de
kilohertz et offrent des dbits allant de quelques bits par jour plusieurs dizaines de kilo-
bits par seconde. Ces dbits sont fortement conditionns par les contraintes de consom-
mation dnergie des modems et par les distances de communications vises, le produit
dbit-distance tant habituellement infrieur 50 kbits/skm [Kilfoyle and Baggeroer,
2000]. Comparativement aux performances offertes par les systmes de communica-
tion radio voluant dans lair, les dbits des modems acoustiques peuvent paratre d-
risoires. Cependant, il faut noter que les contraintes imposes par le milieu sous-marin
sont semblablement disproportionnes. Le canal acoustique sous-marin prsente la
fois des effets de rexion/rfraction gnrant de la dispersion temporelle, une att-
nuation fortement croissante avec la frquence qui restreint la bande-passante dispo-
nible, ainsi quune forte variabilit du milieu, qui, combine avec une faible clrit des
ondes acoustiques, induit une dispersion frquentielle importante. A titre de comparai-
son, les systmes radio mobiles sont eux aussi contraints par les phnomnes de disper-
sion temps-frquence. La grande diffrence avec les communications acoustiques sous-
marines (ASM) est lordre de grandeur de ces phnomnes. Le produit dispersion tem-
porelle - dispersion frquentielle est habituellement compris entre 10
4
et 10
7
pour les
systmes radio alors quil est gnralement de lordre de 10
2
pour les systmes ASM.
Aprs les travaux prcurseurs des annes 70-80 [Baggeroer, 1984] et les pre-
mires valuations des communications cohrentes haut-dbit des annes 90
[Kilfoyle and Baggeroer, 2000], de nouvelles formes dondes et techniques de rcep-
t
e
l
-
0
0
6
3
8
8
3
6
,
v
e
r
s
i
o
n
1
-
7
N
o
v
2
0
1
1
2 INTRODUCTION GNRALE
tion prometteuses mergent actuellement [Stojanovic et al., 2008]. Parmi ces techniques,
souvent empruntes au domaine des radio-communications, on trouve les modula-
tions multi-porteuses [Frassati et al., 2005; Gomes and Stojanovic, 2009; Li et al., 2008;
Leus and van Walree, 2009], le recours aux systmes multi-capteurs [Li et al., 2009;
Roy et al., 2007], les techniques de codage canal type turbo-codes [Trubuil et al., 2010] ou
LDPC [Huang et al., 2008], lidentication de canaux parcimonieux [Berger et al., 2010;
Zamanizadeh et al., 2010] ou encore les techniques itratives de rception [Laot et al.,
2010; Otnes and Eggen, 2008]. Les rcentes exprimentations de ces technologies ouvrent
des perspectives trs intressantes compares celles des modems commercialiss ac-
tuellement. Certains rsultats exprimentaux rapports dans la littrature dmontrent
mme quil est parfois possible de communiquer 10 kbits/s sur des distances de lordre
de 50 km [Sangfelt et al., 2008], ce qui correspond un produit dbit-distance 10 fois
suprieur aux limites communment admises jusqu rcemment. Cependant, il est
encore difcile de dterminer si ces nouvelles techniques peuvent effectivement mener
une rupture technologique en acoustique sous-marine ou si les rsultats rapports
sont principalement la consquence de conditions exprimentales exceptionnellement
favorables.
En effet, lidentication de formes dondes performantes ou la comparaison de tech-
niques de transmission concurrentes reste un processus laborieux en acoustique sous-
marine. Contrairement la recherche dans le domaine des radio-communications qui
repose principalement sur des modles de propagationbien tablis, la recherche en com-
municationacoustique sous-marine ne dispose pas de tels modles et sappuie majoritai-
rement sur des exprimentations en mer. Ceci sexplique en partie par une connaissance
limite des phnomnes physiques qui rgissent le milieu sous-marin et par labsence de
consensus au sein de la communaut de recherche sur certaines proprits, notamment
statistiques, ducanal [Stojanovic and Preisig, 2009]. Labsence de modles standardiss
induit ds lors des cycles de dveloppement longs et coteux.
Un des objectifs de ce travail de thse est de montrer que malgr notre connaissance
limite de la ralit physique du canal, il est possible, en utilisant des outils thoriques
adapts, de dterminer en laboratoire des directives pertinentes aussi bien pour la s-
lection des modulations et la validation des modems correspondants que pour les pr-
dictions de dbit. En limitant le recours aux essais en mer, ce travail de laboratoire peut
permettre de rduire les cycles de dveloppement des systmes de communications et
dacclrer ainsi la qute vers lun des objectifs ultimes en communication ASM: lidenti-
cation des techniques dmission-rception offrant le meilleur produit dbit-distance
1
.
Toute la difcult consiste alors exploiter au mieux la connaissance objective du milieu
de propagation sans spculer sur le comportement du canal, ce qui pourrait mener des
conclusions errones.
Dans ce cadre de travail particulier, la thorie de linformation savre tre un outil
trs prcieux pour infrer un maximum de conclusions sur le canal et induire des direc-
tives pratiques sur les formats de modulation. Pour baliser le chemin vers la maximi-
sation du produit dbit-distance, nous nous sommes focalis sur les proprits du canal
de transmission en abordant notamment les sujets de modlisation de canal, de calcul
1. Pour tre plus prcis, ce Saint Graal sexprime plutt en fonction du produit efcacit spectrale-
distance (bits/s/Hz.km).
t
e
l
-
0
0
6
3
8
8
3
6
,
v
e
r
s
i
o
n
1
-
7
N
o
v
2
0
1
1
INTRODUCTION GNRALE 3
de capacit et doptimisation de schma de signalisation par rapport la structure de ce
canal. Mme si les rexions proposes dans ce manuscrit reposent sur des outils tho-
riques, la majeure partie des illustrations et analyses numriques se base sur des signaux
rels enregistrs en mer. On sattache ainsi faire le lien entre la thorie et la physique du
milieu. On notera aussi que le travail prsent dans ce manuscrit se limite aux systmes
de transmission Single-Input Single-Output (SISO) nutilisant quun seul transducteur
lmission et quun seul hydrophone la rception.
Plan et contributions
Ce manuscrit de thse sarticule autour de deux parties distinctes. Chacune de ces
parties dbute par sa propre introduction, permettant de situer prcisment le contexte
de travail ainsi que les contributions par rapport la littrature existante. La prsente
introduction est donc succincte.
Dans le cadre de la premire partie, nous nous intressons la modlisation des ca-
naux ASM dispersifs en temps et frquence.
Le chapitre 1 prsente des gnralits sur les phnomnes physiques qui rgissent le
comportement du canal acoustique sous-marin ainsi que leurs impacts sur les systmes
de communications.
Dans le chapitre 2, nous nous attachons construire un modle de canal param-
trique partir dune informationrestreinte sur le milieuASM modliser. Enutilisant une
mthode dinfrence inductive, connue sous le nom du principe dentropie maximale,
nous montrons quil est possible dobtenir un modle proche de la ralit physique en
connaissant seulement quelques grandeurs statistiques comme la puissance moyenne et
ltalement Doppler. Ce modle repose principalement sur les travaux de Jaynes [Jaynes,
1957], Debbah et al. [Debbah and Mller, 2005; Guillaud et al., 2007], et reprend une par-
tie importante de larticle
F.-X. Socheleau, C. Laot, and J.-M. Passerieux, "Concise Derivation of Scattering
Function from Channel Entropy Maximization", IEEE Trans. Commun, vol. 58, no.
11, Nov. 2010.
Au chapitre 3, nous proposons un modle de canal pilot par des donnes relles. Ce
modle, dit de rejeu stochastique, repose sur lhypothse selon laquelle un canal sond
en mer est une observation dun processus alatoire sous-jacent. A partir de la mesure
effectue en mer, les proprits statistiques du canal sont analyses an de pouvoir g-
nrer en laboratoire de nouvelles ralisations du processus observ. Contrairement au
modle du chapitre 2, qui est paramtrique et ne ncessite pas de donnes relles, le mo-
dle propos dans le chapitre 3 est non paramtrique et consiste, partir de lobservation
dun canal sur une tranche temporelle donne, gnrer dautres ralisations de ce canal
ayant exactement les mmes proprits statistiques. Ce chapitre couvre larticle
F.-X. Socheleau, C. Laot, andJ.-M. Passerieux, "Stochastic Replay of Non-WSSUS Un-
derwater Acoustic Communication Channels Recorded at Sea", IEEE Trans. Signal
Process., vol. 59, No. 10, pp. 4838-4849, 2011.
Dans la seconde partie de ce manuscrit, nous cherchons tout dabord connatre les
t
e
l
-
0
0
6
3
8
8
3
6
,
v
e
r
s
i
o
n
1
-
7
N
o
v
2
0
1
1
4 INTRODUCTION GNRALE
limites thoriques de dbit de communication quil est possible datteindre en ASM et
initions ensuite une rexionsur les directives de conceptionde schmas de signalisation
qui permettraient doptimiser les ressources offertes par le milieu ASM.
La capacit du canal de transmission acoustique sous-marin est aborde dans le cha-
pitre 4 en considrant des contraintes plus ralistes que ltat de lart sur le sujet. Le ca-
nal est ici suppos doublement dispersif, les puissances crtes et moyennes limites et
la ralisation courante du canal inconnue de lmetteur et du rcepteur (contexte non-
cohrent). La capacit exacte du canal sous de telles hypothses reste encore inconnue.
Par consquent, des bornes sur cette capacit sont calcules. Ce chapitre reprend en par-
tie larticle
J.-M. Passerieux, F.-X. Socheleau, C. Laot, "Achievable Rates over Doubly Selective
Rician-Fading Channels under Peak-Power Constraint", soumis IEEE Trans. Wire-
less Commun., Oct. 2011.
Le chapitre 5 sintresse loptimisation du schma de signalisation au regard des ca-
ractristiques du canal ASM. Nous considrons un schma de signalisation de type Weyl-
Heisenberg qui consiste multiplexer linformation en temps-frquence et permet une
adaptation relativement souple au caractre doublement dispersif du canal. Nous discu-
tons des diffrents paramtres quil est possible doptimiser et discutons de leur impact
sur linterfrence observe la rception et sur le dbit dinformation. Nous nous focali-
sons particulirement sur les techniques doptimisation de puissance.
t
e
l
-
0
0
6
3
8
8
3
6
,
v
e
r
s
i
o
n
1
-
7
N
o
v
2
0
1
1
Premire partie
Modlisation du canal acoustique
sous-marin
t
e
l
-
0
0
6
3
8
8
3
6
,
v
e
r
s
i
o
n
1
-
7
N
o
v
2
0
1
1
t
e
l
-
0
0
6
3
8
8
3
6
,
v
e
r
s
i
o
n
1
-
7
N
o
v
2
0
1
1
Introduction
An danticiper en laboratoire les performances des systmes de communication
acoustique en environnements sous-marins rels, les modles de canaux de propaga-
tion sont essentiels. Selon leur degr dexhaustivit et de prcision, ces modles peuvent
augmenter fortement la probabilit de succs des essais terrain et rduire ainsi le
cot de dveloppement du systme global. De nombreuses techniques de modlisa-
tion sont disponibles dans la littrature [Brekhovskikh and Lysanov, 1991; Cristol, 2005;
Zhang et al., 2009; Stojanovic, 2008; Geng and Zielinski, 1995; Galvin and Coats, 1996;
Bjerrum-Niese and Ltzen, 2000; Essebbar et al., 1994; Xie et al., 2006; Porter and Bucker,
1987]. Ces modles de canaux acoustiques sous-marins (ASM) reposent sur des forma-
lismes qui sont gnralement soit dterministes et gouverns par des considrations phy-
siques [Stojanovic, 2008; Essebbar et al., 1994; Zhang et al., 2009; Porter and Bucker, 1987]
ou stochastiques [Galvin and Coats, 1996; Geng and Zielinski, 1995; van Walree et al.,
2008] ou une combinaison des deux (les moments des modles stochastiques tant cal-
culs partir de paramtres physiques) [Cristol, 2005; Bjerrum-Niese and Ltzen, 2000;
Xie et al., 2006]. Quel que soit le formalisme choisi, il est communment admis que le ca-
nal est un systme linaire variant dans le temps entirement caractris par sa rponse
impulsionnelle h
H
(, t ) telle que lentre s(t ) et la sortie r (t ) de ce systme vrient
r (t ) =
_
h
H
(, t )s(t )d, (1)
o reprsente le domaine des retards, i.e. le domaine de dispersion temporelle des
multi-trajets du canal, et t le temps absolu.
Comme nous allons le prsenter dans le chapitre 1, les lois de la physique dtermi-
niste savrent trs utiles pour dterminer certaines caractristiques de cette rponse im-
pulsionnelle. Elles permettent notamment de connatre prcisment les retards darrive
des diffrents trajets du canal en fonction de la conguration de la transmission (immer-
sion de lmetteur et du rcepteur, distance, frquence, prol bathyclrimtrique etc.)
ainsi que la puissance moyenne relative de ces trajets. Alors que les considrations d-
terministes offrent une modlisation prcise du comportement moyen du canal, la mo-
dlisation statistique apparat tre la plus approprie pour tenir compte des uctuations
temporelles rapides de la rponse du canal dues aux phnomnes alatoires tels que la
rexion sur les interfaces rugueuses (surface de la mer et le fond) ou les mouvements
de lmetteur (TX) et rcepteur (RX) autour de leur position nominale. Dans un forma-
lisme probabiliste, le canal est alors entirement caractris par la densit de probabi-
lit conjointe du processus alatoire h
H
(, t ). Alors que les distributions marginales de ce
t
e
l
-
0
0
6
3
8
8
3
6
,
v
e
r
s
i
o
n
1
-
7
N
o
v
2
0
1
1
8 INTRODUCTION
processus sapprochent souvent de modles paramtriques connus (de type gaussien par
exemple), ses uctuations temporelles sont plus difciles modliser car elles dpendent
de phnomnes de diffrentes chelles (cycles saisonniers, mouvement des vagues, mou-
vements de TX et RX, caractristiques des diffuseurs etc.).
La modlisation de canal est gnralement confronte un dilemme rcurrent : celui
de capturer au maximumla dynamique relle des processus ocaniques tout en limitant
le nombre de paramtres dentre et le cot de calcul. Non seulement la complexit de
calcul dun modle crot rapidement avec son niveau dexhaustivit mais plus il cherche
sapprocher de la ralit physique prcise du canal et moins il est probable que tous
les paramtres dentre requis soient connus avec une prcision sufsante pour rendre le
modle pertinent. En dautres termes, mme si le modle est trs bon, si la connaissance
que lon a sur les valeurs numriques des paramtres dentre est trop approximative, le
modle est inutile. En communication acoustique sous-marine o lacquisition de don-
nes relles cote cher, les hypothses heuristiques sont souvent prpondrantes pour
palier le manque de connaissances sur les proprits du canal [Kilfoyle and Baggeroer,
2000, Sec. II]. Comme soulign dans lintroduction gnrale, il ny a pas de consensus
dans la communaut de recherche sur la caractrisation statistique des processus dva-
nouissement ASM [Stojanovic and Preisig, 2009]. Ce type de construction de modle ad-
hoc peut entraner des approximations non objectivement justies et est donc non-
consensuel.
Dans un contexte o des efforts mergent de la communaut de recherche en com-
munications ASM pour dnir des modles de canaux standardiss [Otnes et al., 2009],
nous nous sommes intress la modlisationstatistique de canal dans deux cadres din-
frence bien distincts, chacun des ces cadres tant conditionn par le degr de connais-
sance disposition sur le processus modliser. Le premier modle de canal, propos
dans le chapitre 2, repose sur une vision baysienne ou subjective de la notion de pro-
babilit alors que le second modle, prsent dans le chapitre 3, sinscrit lui dans une
dmarche empirique ou frquentiste. Lapproche baysienne considre une probabilit
comme le degr de conviction attribu par un individu la ralisation dun vnement
en tenant compte de son exprience ou de ses constatations alors que la vision frquen-
tiste interprte la probabilit dun vnement comme la frquence relative avec laquelle
il se produit dans un grand nombre dexpriences. Dans un contexte de modlisation, ces
deux approches, souvent opposes, sont de notre point de vue complmentaires, la per-
tinence de lune ou lautre dpendant du degr dabondance de linformation disponible
sur le canal.
Dans le cas souvent rencontr en ASM o des modles de propagation sont nces-
saires mais o linformation disposition sur les phnomnes modliser est limite
et/ou onreuse rassembler, il semble judicieux dopter pour une approche baysienne
de modlisation. Dans le cadre baysien, on ne cherche pas simuler la ralit physique
du canal, qui nest pas connue de faon exhaustive, mais on se focalise plutt sur la mo-
dlisation de la connaissance objective dont on dispose sur cette ralit, tout en laissant
linformationinconnue dans unespace noncontraint. Lobjectif est ici de proposer le mo-
dle le moins arbitraire possible qui ne spcule pas sur le comportement du canal et qui
ne fait pas appel des hypothses non justies. Cette exigence de modlisation peut
tre exprim par le desideratum ou axiome de cohrence utilis en infrence inductive.
t
e
l
-
0
0
6
3
8
8
3
6
,
v
e
r
s
i
o
n
1
-
7
N
o
v
2
0
1
1
INTRODUCTION 9
Ce desideratumpeut tre formul comme suit [Jaynes, 2003] : If a conclusion can be rea-
soned out in more than one way, then every possible way must lead to the same result
2
. En
dautres termes, si lon demande plusieurs personnes de construire un modle partir
de la mme information sur le canal tout en rpondant lexigence de cohrence, alors
toutes ces personnes doivent aboutir au mme modle. Dans [Debbah and Mller, 2005],
Debbah et Mller on abord la question de modlisation cohrente de canaux de propa-
gations en appliquant le principe dentropie maximale introduit dans [Jaynes, 1957] par
Jaynes. Classiquement, lorsque lon veut reprsenter une connaissance imparfaite dun
phnomne X pour lequel seule une information a priori I est connue, le principe den-
tropie maximale consiste attribuer X la densit de probabilit ayant la plus forte en-
tropie parmi toutes les densits de probabilit compatibles avec I . Lentropie au sens de
Shannon tant une mesure du degr dincertitude dune densit de probabilit, la dis-
tribution qui maximise lentropie est, par dnition, la plus incertaine et donc la moins
arbitraire parmi toutes les distributions compatibles avec les contraintes imposes par I .
Comme soulign dans [Jaynes, 1957], la modlisationausens du maximumdentropie
nest pas cense reprsenter la ralit physique dun phnomne, mais plutt un tat de
connaissance sur cette ralit. Une tche essentielle est alors de dterminer la quantit et
le type dinformation dont le modle a besoin pour caractriser lenvironnement mo-
dliser avec sufsamment de prcision. Idalement, on cherche contraindre un modle
avec des paramtres qui soient trs informatifs et faciles connatre ou estimer pour
un environnement donn. Ceci est principalement justie par la volont de fournir un
modle de canal sufsamment prcis qui repose sur peu de paramtres pour lesquels il
est ais de spcier des valeurs numriques.
A laide du principe dentropie maximale et en sinspirant des travaux prsents dans
[Jaynes, 1957] et [Debbah and Mller, 2005], nous proposons dans le chapitre 2, un mo-
dle analytique pour les densits de probabilits marginales du processus h
H
(, t ) discr-
tis ainsi que pour les densits spectrales de puissance de ce processus. Nous montrons
quil est possible de construire un modle compatible avec les donnes exprimentales
partir dune connaissance limite du canal, exprime sous formes de moments tels que la
puissance moyenne ou ltalement doppler. Hormis la proprit de cohrence associe
au principe dentropie maximale, un des atouts majeurs de linfrence baysienne en
gnral est quelle permet dadapter facilement le modle en fonction de linformation
disponible. Au mme titre quune thorie scientique, un modle est une construction
toujours provisoire en principe : il se doit dtre compatible avec les phnomnes obser-
vables par exprimentation, mais cette compatibilit ne signie pas que le modle ou la
thorie soient dnitifs. Lorsquune observation vient contredire le modle, celui-ci peut
voluer pour prendre en compte ces nouvelles donnes.
La limite de lapproche baysienne ou plutt de son formalisme, se rvle lorsquil y
a profusion dinformation sur le canal. Mme si les donnes relles sont onreuses col-
lecter, des entreprises ou institutions lancent rgulirement des campagnes de sondage
du canal ASM pour constituer des bases de donnes utiles lvaluation de systmes en
cours de dveloppement ou au design de systmes futurs. Les donnes rcupres lis-
2. Si une conclusion peut tre obtenue par plus dun moyen, alors tous ces moyens doivent aboutir au
mme rsultat.
t
e
l
-
0
0
6
3
8
8
3
6
,
v
e
r
s
i
o
n
1
-
7
N
o
v
2
0
1
1
10 INTRODUCTION
sue des ces campagnes se prsentent sous la forme dobservations bruites
3
duprocessus
alatoire h
H
(, t ) sur une fentre de dure de lordre de plusieurs dizaines ou centaines de
secondes (cf. chapitre 1). Si lon cherche reproduire au plus proche, laide dun modle
paramtrique, le comportement des processus h
H
(, t ) pour lesquels on dispose dob-
servations riches (i.e. sur de longues dures par rapport au uctuations lmentaires du
canal), le formalisme dinfrence baysienne peut savrer tre lourd manipuler. Typi-
quement, lorsque les proprits statistiques du canal changent au cours du temps ou que
diffrents trajets sont corrls, lutilisationdu principe dentropie maximale devient com-
plexe. En cas de profusion de donnes, on sapproche dun rgime asymptotique pour
lequel linfrence empirique prend tout son sens. Dans ce rgime asymptotique, les ap-
proches baysienne et empirique doivent en thorie converger mais lapproche empi-
rique peut savrer plus facile mettre en oeuvre.
Contrairement linfrence baysienne qui construit un modle pour nous partir
de linformation dont on dispose, linfrence empirique requiert souvent une intuition
pralable pour imaginer un modle, cette intuition tant ensuite compare aux donnes
laide de tests statistiques pour valider ou invalider le modle. Ce caractre intuitif, qui
est souvent dcri, a une vertu : il permet, dans certains cas, de prendre un raccourci et
daboutir rapidement un modle satisfaisant dun point de vue oprationnel. Lillustra-
tion typique de ce cas est la modlisation dune densit de probabilit partir du trac
dhistogrammes des donnes observes. Cette approche est totalement discutable dun
point de vue mthodologique mais a le mrite dtre pragmatique et peut aboutir un
modle simple qui satisfasse les exigences oprationnelles requises sur le modle.
Dans un cadre dinfrence empirique, nous proposons dans le chapitre 3 un modle
de canal aliment par des donnes relles issues de mesures exprimentales effectues
en mer. De faon similaire au modle de canal rcemment propos par van Walree et al.
dans [van Walree et al., 2008], notre modle repose sur le postulat selon lequel un canal
de communication ASM sond un endroit donn et sur une fentre temporelle donne
est une observation dun processus alatoire ergodique sous-jacent h
H
(, t ). A partir de
cette mesure, les proprits statistiques du canal sont analyses an de pouvoir gnrer
en laboratoire de nouvelles ralisations du processus observ. Cest ce que nous appelons
par la suite le rejeu stochastique de canal. Une telle mthode de modlisation offre un
cadre dapplication assez restreint compar aux modles de propagation paramtriques
usuels puisquelle correspond une conguration de transmission (immersion TX/RX,
frquence, distance TX-RX etc.) particulire. Cependant, cette approche est dun grand
intrt car elle permet de reproduire de faon able la ralit physique du milieu ASM et
dexploiter pleinement les expriences en mer dans des conditions de laboratoire contr-
les et reproductibles. A partir dune rponse impulsionnelle enregistre en mer et grce
au rejeu stochastique, il est ainsi possible de comparer des techniques de transmissions
concurrentes confrontes au mme canal avec un niveau de signication statistique pr-
cis. Loriginalitprincipale de la mthode propose dans la chapitre 3 par rapport aux m-
thodes de rejeu stochastique existantes [van Walree et al., 2008; Galvin and Coats, 1996]
vient de la relaxation des hypothses simplicatrices et parfois errones de stationnarit
au sens large du processus h
H
(, t ) et de dcorrlation entre les diffrents trajets du canal.
3. En plus dtre bruites, les observations de h
H
(, t ) sont gnralement obtenues travers un proces-
sus de mesure qui les dforme (comme la convolution avec les instruments de mesure par exemple).
t
e
l
-
0
0
6
3
8
8
3
6
,
v
e
r
s
i
o
n
1
-
7
N
o
v
2
0
1
1
INTRODUCTION 11
Cette premire partie consacre la modlisation de canal est organise en trois cha-
pitres. Le chapitre 1prsente les principaux phnomnes physiques qui conditionnent les
proprits du canal ASMet leurs implications sur les performances des systmes de com-
munication. Dans un cadre dinfrence baysien, le chapitre 2 est consacr la construc-
tion dun modle statistique de canal partir dune connaissance limite de celui-ci. Le
chapitre 3 repose sur lanalyse de donnes relles et est ddi ltude dun modle de
rejeu stochastique de canal.
t
e
l
-
0
0
6
3
8
8
3
6
,
v
e
r
s
i
o
n
1
-
7
N
o
v
2
0
1
1
t
e
l
-
0
0
6
3
8
8
3
6
,
v
e
r
s
i
o
n
1
-
7
N
o
v
2
0
1
1
CHAPITRE
1
Gnralits sur le milieu de
propagation acoustique
sous-marin
It is wrong to think that the task of physics is to nd out
how Nature is. Physics concerns what we can say about
Nature.
Niels Bohr
Ce chapitre est consacr aux rappels, dnitions et notations qui seront utilises dans
cette partie du document. Nous nous intressons tout dabord aux principaux phno-
mnes physiques qui rgissent le comportement du canal acoustique sous-marin et dis-
cutons ensuite leurs impacts sur les systmes de communication. Enn, nous prsentons
dans un troisime temps les notations et les hypothses relatives au canal sur lesquelles
reposent les travaux prsents dans ce manuscrit.
1.1 Physique du milieu
Du fait de son caractre non-homogne, locan est un milieu de propagation trs
complexe pour londe acoustique. Comme nous allons le prsenter dans cette section,
les htrognits, quelles soient rgulires ou alatoires, impactent fortement le champ
acoustique. Cette section a pour objectif de rappeler quelques notions lmentaires de
physique lies la propagation des ondes acoustiques en milieu sous-marin et se limite
aux phnomnes inuant les performances des systmes de communication.
1.1.1 Clrit de londe acoustique
Le son se propage dans leau
1
une vitesse de lordre de 1500 m.s
1
et dune manire
gnrale, le milieu acoustique sous-marin nest pas isoclre. La clrit c du son dpend
en effet de grandeurs telles que la temprature, la pression hydrostatique ou la salinit
(dans une moindre mesure) qui varient dun point de lespace un autre et qui peuvent
aussi uctuer au cours du temps. Des formules empiriques sont disponibles dans la litt-
rature pour exprimer cette dpendance de c vis--vis de ces trois paramtres (la pression
tant gnralement exprime par le biais de la profondeur z). Une formule couramment
utilise est la formule de Clay et Medwin dont lexpression est [Clay and Medwin, 1977]
c =1449.2+4.6T 0.055T
2
+0.00029T
3
+(1.340.010T)(S 35) +0.016z, (1.1)
1. A titre de comparaison, les ondes acoustiques se propagent environ 340 m.s
1
dans lair.
t
e
l
-
0
0
6
3
8
8
3
6
,
v
e
r
s
i
o
n
1
-
7
N
o
v
2
0
1
1
14
CHAPITRE 1. GNRALITS SUR LE MILIEU DE PROPAGATION ACOUSTIQUE
SOUS-MARIN
avec c en m.s
1
, T la temprature en degrs Celsius, S la salinit en % et z en mtres. La
clrit de londe acoustique crot avec chacun de ces paramtres et est variable dans le
temps et dans lespace. Hormis quelques rgions comme celles o convergent les cou-
rants chauds et froids, le gradient vertical de clrit est gnralement beaucoup plus im-
portant que le gradient horizontal (rapport de lordre de 1000 [Brekhovskikh and Lysanov,
1991]). Ds lors quil sagisse de modliser les variations spatiales de la clrit, unmodle
simpli consiste alors approcher la structure de locean par un empilement de strates
horizontales auxquelles on attribue des valeurs de clrit diffrentes suivant leur pro-
fondeur. Le champ de clrit sur une zone gographique et un instant donn est alors
reprsent par le prol bathyclrimtrique sur lequel la clrit est trace en fonction de
la profondeur.
Dans des environnements grand-fond, la temprature diminue gnralement avec la
profondeur linverse de la pression qui augmente avec celle-ci. La salinit variant peu,
leffet contraire de la temprature et de la pression aboutit un prol de clrit qui d-
crot dabord avec la profondeur (prpondrance de leffet de la temprature en surface)
puis augmente avec z (effet de la pression). A titre dexemple, la gure 1.1 illustre de faon
trs schmatique la bathyclrimtrie dans les zones climat tempr. Prs de la surface,
la temprature et la pression tant en gnral quasiment constantes, la vitesse du son
varie peu. A mesure que la profondeur augmente, la temprature diminue, impliquant
une diminution de la clrit qui nest pas compense par laugmentation de la pression
avec la profondeur. Cette zone de diminution de temprature est appele la thermocline
principale. Au del dune certaine profondeur, la temprature atteint une valeur stable
denviron 4 C (on parle disotherme), et partir de l, laugmentation de pression avec
la profondeur fait crotre la clrit. La gure 1.1 est bien entendu schmatique et dans
la ralit on observe de nombreux prols de clrit trs diffrents (se rfrer la base
World Ocean Atlas
2
par exemple).
La variation de la clrit se situe gnralement entre 1450 et 1550 m.s
1
. Mme si
ces variations sont relativement faibles, nous allons voir quelles affectent de faon trs
signicative la propagation des ondes acoustiques dans locan.
1.1.2 Equation donde et thorie des rayons
Dune manire gnrale, la propagation des ondes acoustiques en milieu non homo-
gne est dcrite par lquation donde [Robinson and Lef, 1994]
div
_
1
p(r , t )
_
1
c
2
(r , t )
2
p(r , t )
t
2
=
_
0, en dehors de la source
S(r , t ), la source,
(1.2)
avec
r le vecteur position,
t le temps,
la densit du milieu,
p(r , t ) la pression acoustique,
c(r , t ) la clrit du son,
2. http ://www.nodc.noaa.gov/
t
e
l
-
0
0
6
3
8
8
3
6
,
v
e
r
s
i
o
n
1
-
7
N
o
v
2
0
1
1
1.1. PHYSIQUE DU MILIEU 15
Figure 1.1 Reprsentation schmatique duprol de clrit en zone tempre (source :
[Stojanovic and Preisig, 2009]).
S(r , t ) la distribution de la source.
Si lon considre un milieu dont la clrit est invariante dans le temps
3
et une source
harmonique qui gnre une pression de la forme p(r , t ) = p(r ) exp(i t ), (1.2) devient
lquation de Helmholtz indpendante du temps
div
_
1
p(r )
_
+k
2
p(r ) =(r r
s
), (1.3)
o r
s
est la position de la source, () limpulsion de Dirac, et k = /c le nombre donde.
Pour les rgions loignes de la source o la densit du milieu ne varie pas de faon no-
table, (1.3) devient
p(r ) +k
2
p(r ) =0, (1.4)
o reprsente ici le laplacien. La rsolution des quations que nous venons de dcrire
reprsente la base de la plupart des modles de propagation dvelopps par les acousti-
ciens. Le milieuacoustique sous-marintant complexe, les solutions de lquationdonde
ou de Helmholtz sont approches de faon numrique. En fonction des hypothses sup-
poses sur le milieu, il existe diffrentes approches de modlisation, on peut citer par
exemple : la thorie des rayons, lquation parabolique, les mthodes des modes nor-
maux et des modes coupls, la mthode des lments nis, la mthode des diffrences
nies ou lintgration du nombre donde (Fast Field Program) [Buckingham, 1992; Etter,
2003; Robinson and Lef, 1994; Brekhovskikh and Lysanov, 1991].
Dans un contexte de communicationASM, lapproche la plus souvent applique est la
thorie des rayons. On suppose dans cette thorie que lnergie acoustique transmise de
3. o tout du moins variant trs lentement lchelle des phnomnes modliser
t
e
l
-
0
0
6
3
8
8
3
6
,
v
e
r
s
i
o
n
1
-
7
N
o
v
2
0
1
1
16
CHAPITRE 1. GNRALITS SUR LE MILIEU DE PROPAGATION ACOUSTIQUE
SOUS-MARIN
lmetteur au rcepteur suit des chemins particuliers, que lon appelle rayons, et qui sont
par dnition les normales aux fronts dondes de phase constante. Cette thorie sappuie
aussi sur lhypothse hautes frquences des signaux transmis. Un signal est dit haute-
frquence lorsque sa longueur donde est trs infrieure au gradient de clrit. Une di-
rective approximative pour la dnition dun signal haute frquence est fournie par la
relation [Etter, 2003, Sec. 4.3]
f >10
c
H
(1.5)
o f est la frquence en Hz et H la hauteur de la colonne deau en m. Dans lapproche
par rayons, la pression acoustique est reprsente sous la forme
p(r ) = A(r ) exp(i k
0
W(r )), (1.6)
o k
0
est le nombre donde de rfrence (i.e. un point x), A dsigne lampli-
tude inconnue et W la fonction dite eikonale, inconnue galement. En dveloppant
lquation de Helmholtz, A et W sont obtenus par la rsolution du systme suivant
[Brekhovskikh and Lysanov, 1991]
(W)
2
=
_
k
k
0
_
2
(1.7)
2AW +AW = 0. (1.8)
Lquation (1.7) est dite eikonale et dnit la gomtrie des rayons, i.e., les lignes ortho-
gonales au front donde avec W = cste. Lquation (1.8), dite de transport, permet quant
elle de dterminer lamplitude de londe. Aprs quelques manipulations, lquation ei-
konale permet daboutir une loi de loptique gomtrique trs connue, la loi de Snell-
Descartes : ncos = cste o dsigne langle de rasance form par la direction du rayon
acoustique et linterface entre deux milieux de clrit diffrente et o n est lindice de
rfraction.
A partir de la loi de Snell-Descartes et pour un prol de clrit donn, il est possible
de tracer les trajectoires des rayons issus dune source sonore. En considrant une stra-
tication horizontale de locan, la variation continue de lindice du milieu avec la pro-
fondeur entrane une courbure progressive des ondes acoustiques qui, daprs (1.7), sont
rfractes vers les zones de plus faible clrit. Dans un milieu qui nest pas isoclre, les
rayons ne suivent donc pas des trajectoires rectilignes. Ceci est illustr la gure 1.2 qui
montre un trac de rayons associ un prol de clrit mesur en Atlantique nord.
La courbure des ondes acoustiques implique lapparition de zones gographiques
particulires comme les zones dites dombre qui restent non insonies mme si lmet-
teur rayonne de faon isotrope. Une autre particularit du canal ASM est lexistence de
chenaux sonores qui se trouvent proximit de zones o le gradient de clrit dans
la colonne deau est nul. Dans ces chenaux, dcouverts au cours de la seconde guerre
mondiale, londe acoustique peut se propager sans tre rchie par la surface ou le fond
par simple rfraction et bncie dun phnomne de guide donde permettant de trans-
mettre de linformation sur de trs longues distances.
t
e
l
-
0
0
6
3
8
8
3
6
,
v
e
r
s
i
o
n
1
-
7
N
o
v
2
0
1
1
1.1. PHYSIQUE DU MILIEU 17
Figure 1.2 (a) Exemple de prol de clrit mesur en Atlantique nord, (b) trac de
rayons associ avec un metteur immerg 1000 m de profondeur (source : [Rabaste,
2006]).
1.1.3 Pertes de propagation
Lors de son cheminement dans le canal ASM, le signal acoustique subit une attnua-
tion qui dpend principalement des pertes induites par trois phnomnes de nature dif-
frente. Ondistingue les pertes par divergence gomtrique, les pertes par amortissement
et les pertes dues aux interactions avec le fond et la surface.
Les pertes par divergence gomtrique correspondent la diminution de la densit
surfacique de puissance au fur et mesure que londe acoustique sloigne de la source.
Ces pertes sexpriment en dcibels comme
A
d
=10mlogD, (1.9)
o D est la distance en mtres entre lmetteur et le rcepteur et m est le facteur de dis-
persionspatiale dpendant de la gomtrie de cette dispersion(cylindrique : m=1, sph-
rique : m=2).
Les pertes par amortissement correspondent en partie la transmission de lnergie
acoustique dun signal au milieu sous la forme dnergie calorique. Ce phnomne est
du la viscosit de leau de mer qui induit des forces de frottements lchelle molcu-
laire lors du passage dune onde acoustique. Il existe aussi une attnuation supplmen-
taire rsultante de la dissociation ou relaxation de composs chimiques (acide borique
et sulfate de magnsium) lors du passage cette onde [Domingo, 2008]. Lamortissement
est exprim grce un coefcient dabsorption ( f ) qui dpend de la frquence et est
exprim en dB perdu par kilomtre. Il existe plusieurs modles pour ce coefcient, une
t
e
l
-
0
0
6
3
8
8
3
6
,
v
e
r
s
i
o
n
1
-
7
N
o
v
2
0
1
1
18
CHAPITRE 1. GNRALITS SUR LE MILIEU DE PROPAGATION ACOUSTIQUE
SOUS-MARIN
expression largement employe est donne par la formule de Thorp
( f ) 0.11
f
2
1+ f
2
+44
f
2
4100+ f
2
+2.75.10
4
f
2
+0.003, (1.10)
o f est la frquence exprime en kHz.
Les pertes de rexion fond ou surface sont assez complexes modliser. Les pertes
la surface vont dpendre par exemple de la rugosit ou des bulles dair formes par les
vagues et les pertes de rexionsur le fond sont fonctiondu relief, du type de sdiment ou
de langle de rasance. En premire approximation, on peut considrer que la surface de
la mer comme un recteur idal du fait de la trs grande diffrence dimpdance entre
leau de mer et lair. Si la surface de la mer est calme, la rexion est proche de la perfec-
tion et londe est seulement dphase de sans tre fortement attnue. Les pertes de
rexion
b
sur le fond peuvent quant elles tre approches dans des conditions idales
par [Brekhovskikh and Lysanov, 1991]
b
() =
_
_
_
b
sin
(c/c
b
)
2
cos
2
b
sin+
(c/c
b
)
2
cos
2
, cos c/c
b
1, sinon,
(1.11)
o et c dsignent la densit et la clrit du son dans leau et
b
et c
b
la mme
chose mais dans le fond marin. Pour des modles plus dtaills, le lecteur peut se rf-
rer [Brekhovskikh and Lysanov, 1991; Domingo, 2008; Lurton, 2011; Cristol, 2005] par
exemple.
On notera que la puissance dune source acoustique sexprime en dB rfrenc par
rapport une pression de 1 Pa une distance de 1 mtre de la source, cette unit est
note par la suite dB re Pa @ 1 m. Pour rfrence une puissance acoustique de 171 dB re
Pa @ 1 m correspond une puissance lectrique de 1 W.
1.1.4 Variabilit de lenvironnement
En plus dtre htrogne, le milieuocanique uctue au cours du temps. Ces uctua-
tions interviennent diffrentes chelles, on peut citer par exemple :
les phnomnes plantaires qui agissent lchelle de la circonfrence terrestre et
sur plusieurs annes,
les cycles saisonniers qui vont, entre autres, impacter les prols de clrit au tra-
vers des variations de temprature,
les phnomnes de mares qui sont des cycles journaliers,
les phnomnes sappliquant aux microstructures (quelques mtres) telles que les
turbulences, les vagues ou la rugosit des interfaces fond et surface.
1.1.5 Bruit
Il existe plusieurs sources naturelles importantes de bruit ambiant dans locan des
frquences dintrt pour les communications acoustiques. Les principales sources de
bruit ambiant sont [Stojanovic, 2007] : les turbulences, le trac maritime, les vagues et
t
e
l
-
0
0
6
3
8
8
3
6
,
v
e
r
s
i
o
n
1
-
7
N
o
v
2
0
1
1
1.2. IMPLICATIONS DES PARTICULARITS DU MILIEU SUR LES COMMUNICATIONS
19
le bruit thermique. Chacune des sources peut tre modlise par une distribution gaus-
sienne de densit spectrale de puissance donne par
turbulences : 10logN
t
( f ) =1730log f , (1.12)
trac maritime : 10logN
s
( f ) =40+20(s 0.5) +26log f 60log( f +0.03),(1.13)
vagues : 10logN
w
( f ) =50+7.5w
1/2
+20log f 40log( f +0.4), (1.14)
bruit thermique : 10logN
th
( f ) =15+20log f . (1.15)
Le frquence est ici exprime en kHz, s reprsente le facteur dactivit maritime com-
pris entre 0 et 1 et w est la vitesse du vent en m.s
1
. Il existe bien videmment dautres
sources de bruit (biologiques ou autres) qui ne sont pas voques ici car elles sont spci-
ques un contexte particulier (ex. : claquement des crevettes, sifement, claquement,
ppiement etc. des mammifres marins). Des exemples de densit spectrale de bruit sont
montrs la gure 1.3 pour diffrents facteurs dactivit maritime et vitesses de vent. Un
modle simpli consiste approcher la contribution des quatre sources de bruit par un
modle de densit spectrale de puissance dcroissant de 17 ou 18 dB par dcade.
10
0
10
1
10
2
10
3
10
4
10
5
10
20
30
40
50
60
70
80
90
100
110
f (Hz)
D
S
P
d
u
b
r
u
i
t
(
d
B
r
e
P
a
@
1
m
)
Modle simplifi
s=0, w=0m.s
1
s=0.5, w=0 m.s
1
s=0, w=10 m.s
1
s=0.5, w=10 m.s
1
Figure 1.3 Densit spectrale de puissance de bruit.
1.2 Implications des particularits du milieu sur les com-
munications
1.2.1 Environnement petit fond et dispersion temporelle
Le contexte dapplication de cette thse se focalise principalement sur lenvironne-
ment marin dit petit-fond . De nombreuses dnitions de lexpression petit-fond
t
e
l
-
0
0
6
3
8
8
3
6
,
v
e
r
s
i
o
n
1
-
7
N
o
v
2
0
1
1
20
CHAPITRE 1. GNRALITS SUR LE MILIEU DE PROPAGATION ACOUSTIQUE
SOUS-MARIN
sont avances dans la littrature. Elles se raccrochent gnralement soit des consid-
rations gologiques ou se fondent sur le rapport entre la distance de propagation D et
la hauteur deau H. Dun point de vue gologique, les petits fonds correspondent aux
plateaux continentaux dont la profondeur est gnralement infrieure la centaine de
mtres. Du point de vue de la propagation acoustique, on parle de petits fonds lorsque
les rayons acoustiques mis interagissent de faon importante avec les limites que sont le
fondet la surface [Rabaste, 2006]. Ces interactions peuvent sexprimer autravers de carac-
tristiques gomtriques comme le rapport D/H. Par exemple, dans [Coates, 1993], dif-
frentes terminologies sont employes en fonction du rapport D/H pour qualier la pro-
fondeur des eaux. Dans notre contexte, on sintresse aux applications qui voluent prin-
cipalement dans les zones portuaires ou ctires et pour lesquels D/H >>1. Un exemple
typique dapplication correspondant ce contexte est la communication sur plusieurs
kilomtres entre un robot sous-marin autonome (AUV
4
) et une plate-forme en surface
dans une zone o la hauteur deau est de lordre de plusieurs dizaines de mtres.
Du fait de la faible hauteur deau, la bathyclrimtrie des environnements petits
fonds ne prsente pas toutes les caractristiques de celle des grands fonds comme illustr
aux gures 1.1 et 1.2-(a). Cette bathyclrimtrie petit fond est principalement dtermi-
ne par la temprature. En hiver, la couche deau est isotherme de sorte que le milieu de-
vient isoclre, alors quen t elle peut prsenter une diminution de temprature entre
la surface et le fond induisant un gradient ngatif de clrit. Lenvironnement petit fond
est gnralement plus htrogne que lenvironnement grand fond du fait par exemple
des phnomnes de mares, de la rugosit du fond, de la prsence potentielle destuaires
etc.
De part les nombreuses rexions sur le fond et la surface, les canaux ASMpetits fonds
sont trs dispersifs en temps ce qui peut engendrer de linterfrence entre symboles din-
formation transmis et dgrader les performances des systmes de communication (ou
au moins complexier les rcepteurs). Comme illustr la section 1.3, cette dispersion
est de lordre de plusieurs milli-secondes pour les canaux les moins dispersifs jusqu la
centaine de milli-secondes pour les canaux les plus dispersifs.
1.2.2 Bande passante disponible
Comme il est montr dans la sectionprcdente, les pertes de propagationainsi que la
puissance du bruit ambiant dpendent fortement de la frquence. Les pertes damortis-
sement augmentent signicativement avec la frquence alors que le bruit lui diminue.
Lattnuation du signal saccrot aussi mesure que la distance parcourue par londe
acoustique augmente. Dans un environnement petit-fond et pour une frquence et une
distance donnes, il possible deffectuer un bilan de liaison approximatif en calculant le
rapport signal sur bruit espr la rception comme
SNR(D, f ) =SL+DI( f ) 10mlogD
. .
di ver gence
( f ).D10
3
. .
absor pti on
50+18log( f )
. .
br ui t
, (1.16)
4. Autonomous Underwater Vehicle
t
e
l
-
0
0
6
3
8
8
3
6
,
v
e
r
s
i
o
n
1
-
7
N
o
v
2
0
1
1
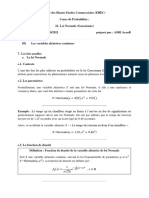
1.2. IMPLICATIONS DES PARTICULARITS DU MILIEU SUR LES COMMUNICATIONS
21
o SL (pour sound level) est la puissance du signal transmis et DI le gain dantenne fonc-
tion de la frquence et de la longueur de lantenne. La gure 1.4 reprsente le rapport
signal sur bruit du canal acoustique en fonction de la frquence et de la distance avec
m = 1.5, SL choisi arbitrairement tel que SNR(D, f ) = 20 dB 1 km et 1 kHz et DI=0
dB (antenne omni-directionnelle). La gure 1.4 met en vidence trois proprits du canal
ASM trs impactantes pour les systmes de communication :
1. la bande passante disponible diminue rapidement en fonction de la distance la-
quelle on veut transmettre. En dautres termes, la capacit du canal dcrot rapide-
ment avec la distance.
2. La frquence optimale, dans le sens ole SNRest maximis, est dcroissante enfonc-
tion de la distance.
3. La bande passante disponible est du mme ordre de grandeur que la frquence cen-
trale, ce qui rend le canal intrinsquement large bande.
0 5 10 15 20 25 30 35 40 45 50
20
10
0
10
20
30
40
50
f (kHz)
S
N
R
(
d
B
)
D=2 km
D=1 km
D=5 km
D=20 km
D=50 km
D=10 km
Figure 1.4 Rapport signal sur bruit du canal acoustique en fonction de la frquence et
de la distance.
1.2.3 Compression/dilatationDoppler
La faible clrit des ondes acoustiques et le caractre large bande du canal induisent
un effet Doppler trs prononc ds lors que lmetteur et/ou le rcepteur sont en mou-
vement. Le Doppler rsultant de cette mobilit est dni comme le ratio entre la vitesse
relative metteur-rcepteur v et la clrit du milieuc. Pour une frquence pure f
n
, leffet
Doppler peut tre exprim au travers dune simple pondration frquentielle avec
f
n
= f
n
(1+). (1.17)
Cette relation est souvent utilise pour les signaux bande troite qui vrient f
c
/B >> 1
o f
c
est la frquence porteuse et B la bande du signal. Dans ce cas, il est souvent consi-
dr que le spectre complet du signal est translat par une mme valeur de frquence
t
e
l
-
0
0
6
3
8
8
3
6
,
v
e
r
s
i
o
n
1
-
7
N
o
v
2
0
1
1
22
CHAPITRE 1. GNRALITS SUR LE MILIEU DE PROPAGATION ACOUSTIQUE
SOUS-MARIN
Doppler f
c
. Pour les signaux large bande comme utiliss en communications ASM, ce
dcalage Doppler nest pas uniforme sur la bande B et est gnralement reprsent par
une compression/dilatation
5
temporelle du signal transmis tel que [Sharif et al., 2000]
r (t ) =s ((1+)t ) , (1.18)
o r (t ) est le signal reu et s(t ) le signal transmis
6
. Dans le domaine frquentiel,
cette compression/dilatation a pour effet de transformer un signal en bande de base
de bande B en un signal de bande (1 + )B centr sur autour de la frquence f
c
[Stovanovic and Freitag].
Cet effet Doppler doit imprativement tre pris en compte la rception, notamment
dans les tages de synchronisation, pour viter une dgradation importante des perfor-
mances de transmission [Eynard and Laot, 2008]. Comme discut au chapitre 3, la mobi-
lit de lmetteur et du rcepteur peut aussi impacter les proprits statistiques du canal.
On notera de plus que la faible clrit des ondes acoustiques peut tre critique pour des
applications rseaux puisquelle engendre des dlais de propagations trs importants (ex :
il faut plus de 13 s pour effectuer un ping sur un noeud situ 10 km).
1.2.4 Dispersion frquentielle
Comme discut la section 1.1.4, le canal ASMuctue au cours du temps. Les uctua-
tions lchelle de la dure dun paquet de donnes (de plusieurs secondes plusieurs
minutes) sont principalement dues la rugosit et lagitation de la surface de la mer,
aux irrgularits du fond combines aux mouvements de lmetteur et la prsence de
populations supercielles de micro-bulles dair [Cristol and Passerieux, 2009]. Ces micro-
structures sont gnralement considres comme alatoires. Une puissance acoustique
rencontrant une surface alatoire est redistribue selon deux composantes :
une partie cohrente, se comportant de faon spculaire, cest--dire comme si lin-
terface tait plane, sauf pour un taux dattnuation prenant la forme dun simple
coefcient de rexion,
une partie alatoire diffuse.
Les uctuations du canal, engendres par la diffusion alatoire de la puissance acous-
tique, gnrent donc de la dispersion frquentielle, designe galement comme ltale-
ment Doppler. Au mme titre que la dispersion temporelle peut induire de linterfrence
entre symboles pour les systmes de communication, la dispersion frquentielle peut in-
duire de linterfrence entre sous-porteuses si linformation est multiplexe dans le do-
maine frquentiel. Mme si linformation est uniquement multiplexe dans le domaine
temporel, la dispersion frquentielle implique dans la plupart des cas la mise en oeuvre
dalgorithmes adaptatifs pour suivre les variations du canal. La dispersion frquentielle
des canaux ASM est gnralement de lordre de quelques Hertz [van Walree, 2011].
5. compression si v >0 et dilatation sinon.
6. On suppose implicitement un canal idal mono-trajet sans perte de puissance et sans bruit.
t
e
l
-
0
0
6
3
8
8
3
6
,
v
e
r
s
i
o
n
1
-
7
N
o
v
2
0
1
1
1.3. MODLE DE TRANSMISSION 23
1.3 Modle de transmission
1.3.1 Oprateur canal
Laction du canal ASMpeut tre dcrite au travers dun oprateur linaire H: L
2
(R)
L
2
(R), o L
2
(R) reprsente lespace de Hilbert des fonctions de carr intgrable, tel que
lentre s(t ) et la sortie r (t ) du canal vrient
r (t ) = (Hs)(t ) (1.19)
=
_
h
H
(, t )s(t )d (1.20)
=
_
G
H
(, )s(t )e
2j t
dd, (1.21)
o h
H
(, t ) est la rponse impulsionnelle du canal variant dans le temps et G
H
(, ) est la
fonction dtalement caractrisant la rectivit du diffuseur associ au retard et la
frquence Doppler . Cette fonction vrie G
H
(, ) =
_
h
H
(, t )e
2j t
dt .
Dnition 1.3.1 H est dit dispersif en temps si, pour s(t ) =(t ), la dure du signal (Hs)(t )
est strictement positive.
Dnition 1.3.2 H est dit dispersif en frquence si, pour s(t ) = e
j 2f
0
t
, la bande du signal
(Hs)(t ) est strictement positive.
Dnition 1.3.3 Hest dit slectif en temps si h
H
(, t ) dpend de t .
Dnition 1.3.4 Hest dit slectif en frquence si h
H
(, t ) dpend de .
Proprit 1.3.1 Un canal slctif en temps (resp. frquence) est dispersif en frquence (resp.
temps) et inversement.
Onnotera quil existe dautres formalismes de reprsentationde loprateur canal, no-
tamment lorsque celui-ci est large bande (cf. [Rickard et al., 2005] par exemple).
1.3.2 Canal alatoire et hypothse WSSUS
Il est gnralement judicieux de modliser les canaux ASM comme alatoires. Pre-
mirement parce quune description uniquement dterministe du milieu de propagation
physique est trop complexe dans la plupart des cas dintrt pratique, et deuximement,
parce quune description alatoire est plus robuste dans le sens o les systmes de com-
munication conus sur la base de canaux alatoires devraient pouvoir fonctionner dans
une multitude denvironnements de propagation diffrents. Par consquent, nous consi-
drons loprateur Hcomme alatoire.
Pour faciliter le traitement mathmatique, il est parfois ncessaire de faire des hy-
pothses supplmentaires sur le canal. Un modle simplif de loprateur H est le mo-
dle WSSUS (wide-sense stationary and uncorrelatedscattering) propos par Bello [Bello,
t
e
l
-
0
0
6
3
8
8
3
6
,
v
e
r
s
i
o
n
1
-
7
N
o
v
2
0
1
1
24
CHAPITRE 1. GNRALITS SUR LE MILIEU DE PROPAGATION ACOUSTIQUE
SOUS-MARIN
1963]. Ce modle repose sur deux hypothses lmentaires : la stationnarit au sens large
et la dcorrlation du phnomne de diffusion. Comme expliqu au chapitre 3, ces hypo-
thses ne sont pas toujours vries dans la pratique. Cependant, sur une fentre tempo-
relle et une bande limite, ces hypothses peuvent tre considres comme raisonnables,
on parle alors de modle quasi-WSSUS. Mathmatiquement, le modle WSSUS implique
E
_
_
G
H
(, )
h
()
__
G
H
(
)
h
)
_
_
=S
H
(, )(
)(
), (1.22)
o
h
=E
t
{h
H
(, t )} et S
H
(, ) dsigne la fonction de diffusion du canal qui vrie
S
H
(, ) =
_
u
R
H
(, u)e
2j u
du, (1.23)
avec R
H
(, u) =E
_
_
h
H
(, t )
__
h
H
(, t +u)
_
.
Dnition 1.3.5 La valeur quadratique moyenne (rms) de ltalement Doppler du canal
est dnie comme
rms
=
_
_
( )
2
q
H
()d
_
q
H
()d
(1.24)
o =
_
q
H
()d
_
q
H
()d
et o q
H
() =
_
S
H
(, )d est le prol puissance-Doppler du canal.
Dnition 1.3.6 Le facteur dtalement du canal est dni comme le produit
H
=4
max
max
o
max
et
max
sont respectivement ltalement maximum des retards et du Doppler
tels que S
H
(, ) +|
|
2
() = 0 pour || >
max
et || >
max
. Le support du canal est not
D
=[
max
,
max
] [
max
,
max
]
Lhypothse WSSUS est invoque aux chapitres 4 et 5 principalement par convenance
mathmatique. Limplication physique de cette approximationest discute dans ces cha-
pitres respectifs.
1.3.3 Approximation bande troite
Le modle des rayons de la section 1.1.2, qui dcrit le signal reu comme un nombre
ni de rayons propres retards les uns par rapport aux autres et ayant subi chacun une
attnuation et un dphasage diffrents, permet de modliser la rponse impulsionnelle
h
H
(, t ) comme une somme de Dirac retards les uns des autres et pondrs par des co-
efcients valeurs complexes. Cette rponse impulsionnelle scrit
h
H
(, t ) =
L1
l =0
c
l
(t )(
l
(t )), (1.25)
o L reprsente le nombre de trajets et c
l
(t ) et
l
(t ) sont respectivement lattnuation
complexe et le retard associs au l -ime trajet linstant t . On notera que la slectivit
temporelle du canal sexprime au travers la dpendance de lattnuation complexe par
rapport t et que le canal est slectif en frquence si L 1. La compression/dilatation
t
e
l
-
0
0
6
3
8
8
3
6
,
v
e
r
s
i
o
n
1
-
7
N
o
v
2
0
1
1
1.3. MODLE DE TRANSMISSION 25
Doppler qui rsulte du caractre large bande du canal et de la mobilit relative entre
lmetteur et le rcepteur sexprime quant elle au travers de la dpendance par rapport
t du retard associ chaque trajet. En effet, si lon note vitesse relative de chaque trajet
comme v
l
, alors le retard
l
(t ) est une fonctionafne dutemps et vrie
l
(t ) =
l
t v
l
/c
o
l
est une constante. Dans ce cas, la sortie du canal scrit
r (t ) =
_
L1
l =0
c
l
(t )
_
l
+t
v
l
c
_
s(t )d. (1.26)
Dans notre contexte petit-fond o D/H >>1, on peut supposer que les angles de d-
part (resp. arriv) entre les points de rexions fond-surface et le transducteur dmission
(resp. de rception) sont quasiment les mmes de faon ce que v
l
v, l . Cette hypo-
thse permet de simplier la reprsentationducanal. Eneffet, si lon pose u =+t v/c =
+t , alors (1.26) devient
r (t ) =
_
u
L1
l =0
c
l
(t )(u
l
) s((1+)t u)du. (1.27)
La sortie du canal peut donc se reprsenter sous la forme
r (t ) =(Hs) ((1+)t ) , (1.28)
avec une nouvelle expression de la rponse impulsionnelle du canal donne par
h
H
(, t ) =
L1
l =0
c
l
_
t /(1+)
_
(
l
). (1.29)
Le canal ASM large bande peut donc sexprimer sous la forme dun canal bande troite
ds lors que le facteur dchelle (1+) est appliqu sur le signal transmis. Dans la plupart
des rcepteurs actuels, ce facteur dchelle est compens en tte de rception par simple
rchantillonnage du signal reu de sorte que les traitements situs en aval de ce r-
chantillonnage peuvent faire lhypothse bande troite [Mason et al., 2008; Sharif et al.,
2000; Eynard and Laot, 2008]. Par la suite, on considrera donc le canal ASMsous la forme
bande troite donne dans (1.29).
La gure 1.5-(a) montre lvolution temporelle du prol de puissance dun canal rel
sond en mer avec un metteur mobile. Sur cette gure, on peut observer que le retard de
chaque trajet drive au cours du temps comme modlis par (1.25). La drive moyenne
est approximativement de 8 ms sur une fentre de 20 s ce qui correspond une vitesse
relative moyenne de 0.6 m.s
1
. On notera que par soucis de lisibilit nous avons jusquici
implicitement suppos une vitesse v indpendante du temps alors que dans la ralit, et
comme montr par la gure 1.5-(a), lmetteur et le rcepteur peuvent subir des accl-
rations.
La gure 1.5-(b) montre le mme canal aprs compensation Doppler par rechan-
tillonnage. Dans ce cas, la rponse impulsionnelle du canal peut sexprimer sous la forme
donne par (1.29).
t
e
l
-
0
0
6
3
8
8
3
6
,
v
e
r
s
i
o
n
1
-
7
N
o
v
2
0
1
1
26
CHAPITRE 1. GNRALITS SUR LE MILIEU DE PROPAGATION ACOUSTIQUE
SOUS-MARIN
dB
20
18
16
14
12
10
8
6
4
2
0
(ms)
T
e
m
p
s
(
s
)
0 10 20 30 40 50 60
0
5
10
15
20
dB
20
18
16
14
12
10
8
6
4
2
0
(ms)
T
e
m
p
s
(
s
)
0 10 20 30 40 50 60
0
5
10
15
20
(a) (b)
Figure 1.5 Evolution temporelle du prol de puissance dun canal rel sond en mer
Mditerrane. (a) Pas de compensationDoppler, (b) Doppler compens par rechantillon-
nage.
1.3.4 Modle discret quivalent en bande de base
Sous lhypothse que les uctuations temporelles du canal peuvent se reprsenter
dans le domaine frquentiel sur un support compact de largeur B
D
et que le signal den-
tre est bande limite B, la relation dentre/sortie (1.20) peut se discrtiser et se repr-
senter en bande de base sous la forme [Artes et al., 2004]
y
c
_
k
f
o
_
=
l =
__
h
H
_
,
k
f
o
_
e
j 2f
c
sinc
_
f
i
l
_
d
_
x
c
_
k
f
o
l
f
i
_
, (1.30)
o y
c
(.) et x
c
(.) dsignent respectivement lenveloppe complexe des signaux reus et mis,
f
o
B +B
D
, f
i
B et sinc(x) =sin(x)/(x).
La relation dentre/sortie (1.30) peut tre simplie davantage en considrant que le
signal dentre est sur-chantillonn une frquence f
s
B+B
D
tel que f
i
= f
o
= f
s
. Dans
ce cas, (1.30) peut scrire sous la forme
y(k) =
l =
h
l
(k)x(k l ), (1.31)
o h
l
(k) dsigne le canal discret quivalent en bande de base
7
dexpression
h
l
(k) =
_
h
H
_
,
k
f
s
_
e
j 2f
c
sinc
_
f
s
l
_
d, (1.32)
y(k) = y
c
(k/f
s
) et x(k) =x
c
(k/f
s
).
En consquence de la relation (1.32), on notera que dun point de vue purement tho-
rique, mme si h
H
(, t ) est WSSUS, h
l
(k) ne peut pas vrier lhypothse de diffuseurs
dcorrls prsente la section 1.3.2. En effet, en supposant un canal WSSUS h
H
(, t ),
7. Par soucis de lisibilit, dans la suite du manuscrit nous nous autorisons un abus de langage et d-
signons h
l
(k) comme le l -ime trajet du canal alors quil ne reprsente pas un trajet physique mais un
coefcient du canal discret quivalent en bande de base.
t
e
l
-
0
0
6
3
8
8
3
6
,
v
e
r
s
i
o
n
1
-
7
N
o
v
2
0
1
1
1.3. MODLE DE TRANSMISSION 27
la covariance entre chaque coefcient du canal nest pas ncessairement nulle car elle
sexprime comme
R
l p
(u) = E
_
_
h
l
(k)
h
l
__
h
p
(k +u)
h
p
_
_
, (1.33)
=
_
R
H
_
,
u
f
s
_
sinc
_
f
s
l
_
sinc
_
f
s
p
_
d, (1.34)
o
h
l
=E
k
{h
l
(k)} et R
H
(, ) est donne par lexpression (1.23). Cependant, sous certaines
conditions, il est possible de retrouver des coefcients du canal discret dcorrls. Par
exemple, si lon suppose que la fonction de covariance R
H
_
,
u
f
s
_
est constante par rapport
sur un intervalle T, (1.34) devient
R
l p
(u) =
m=
R
H
_
mT,
u
f
s
__
T
_
m+
1
2
_
T
_
m
1
2
_
sinc
_
f
s
l
_
sinc
_
f
s
p
_
d. (1.35)
Si f
s
vrie f
s
>>1/T alors
_
T
_
m+
1
2
_
T
_
m
1
2
_
sinc
_
f
s
l
_
sinc
_
f
s
p
_
d 0, p =l . (1.36)
Dans ce cas, les coefcients du canal sont dcorrls et R
l l
(u) R
H
_
l
f
s
,
u
f
s
_
/f
s
. Cette ap-
proximation se vrie de plus en plus mesure que f
s
augmente. En consquence, un
moyen de garantir que les trajets du canal de transmissiondiscret quivalent en bande de
base sont mutuellement dcorrls, sous lhypothse dun canal de propagation WSSUS,
est de choisir une frquence dchantillonnage signicativement suprieure la bande
du signal transmis. Du fait des faibles bandes passantes offertes en ASM, ce nest pas
une contrainte forte et cest mme une pratique courante notamment pour compenser la
compression/dilatation Doppler o des facteurs de sur-chantillonnage de 8 ou 16 sont
employs [Mason et al., 2008; Eynard and Laot, 2008].
1.3.5 Exemple de canaux rels
Une partie des rexions et des illustrations prsentes dans ce manuscrit se base sur
des donnes exprimentales recueillies par Thales Underwater Systems proximit de
Sanary-sur-mer (mer Mditerrane) en Octobre 2004 et par le GESMA
8
dans la rade de
Brest (ocan Atlantique) en Octobre 2007. Les deux montages exprimentaux, ainsi que
les conditions dessai, sont rsums dans le tableau 1.1.
Pour les essais de 2004, un ltre adapt une squence binaire pseudo-alatoire a t
mis en oeuvre pour fournir lvolutiontemporelle de la rponse du canal. En 2007, lexp-
rimentation na pas t initialement conue pour le sondage de canal de sorte quaucun
signal sonde ddi na t utilis. Toutefois, puisque toutes les donnes transmises taient
parfaitement connues la rception, il a t possible destimer les rponses impulsion-
nelles laide de mthodes du type moindres carrs adaptatifs.
8. Groupes dEtudes Sous-Marines de lAtlantique
t
e
l
-
0
0
6
3
8
8
3
6
,
v
e
r
s
i
o
n
1
-
7
N
o
v
2
0
1
1
28
CHAPITRE 1. GNRALITS SUR LE MILIEU DE PROPAGATION ACOUSTIQUE
SOUS-MARIN
Tableau 1.1 Conditions dexprimentations
Mer Mditerrane
(2004)
Ocan Atlantique
(2007)
Tx puissance (dB re 1 Pa @
1 m)
190 185
Tx-Rx distance (m) 500-10000 500-3000
Profondeur (m) 60-120 10-40
Tx/Rx immersion (m) 20-50 5
Tx/Rx vitesse relative (m.s
1
) 0-4 0-3
Frquence porteuse (kHz) 6 11.2 or 17.5
Signal sonde Squence pseudo-
alatoire de 48 ms
rpte toutes les
125 ms, comme
donne dans
[Fan and Darnell,
1996, pp. 293].
Flux de donnes
QPSK continu 2.9
kBd ou 4.35 kBd
a
Conditions de mer Vitesse du vent : 10-
15 m.s
1
, hauteur des
vagues modre
Petite houle
a
Se rfrer [Goalic et al., 2008a] pour plus de dtails.
Les gures 1.6 et 1.7 prsentent des rponses de canaux issus de ces exprimentations
aprs compensation Doppler. Les dures dobservation de ces canaux varient de 30 160
secondes. On peut remarquer quen fonction des conditions dexprimentation, ltale-
ment temporel varie de 5 15 ms pour les canaux sonds en Atlantique et stend jusqu
50 ms pour les canaux sonds en mer Mditerrane. On notera aussi qu lexception du
canal (d), un trajet dominant relativement stable est toujours prsent.
t
e
l
-
0
0
6
3
8
8
3
6
,
v
e
r
s
i
o
n
1
-
7
N
o
v
2
0
1
1
1.3. MODLE DE TRANSMISSION 29
dB
30
25
20
15
10
5
0
(ms)
T
e
m
p
s
(
s
)
0 10 20 30 40 50 60
0
5
10
15
20
25
dB
30
25
20
15
10
5
0
(ms)
T
e
m
p
s
(
s
)
0 10 20 30 40 50 60
0
5
10
15
20
25
0 10 20 30 40 50 60
35
30
25
20
15
10
5
0
(ms)
P
u
i
s
s
a
n
c
e
(
d
B
)
0 10 20 30 40 50 60
35
30
25
20
15
10
5
0
(ms)
P
u
i
s
s
a
n
c
e
(
d
B
)
(a) (b)
dB
30
25
20
15
10
5
0
(ms)
T
e
m
p
s
(
s
)
0 10 20 30 40 50 60
0
5
10
15
20
dB
30
25
20
15
10
5
0
(ms)
T
e
m
p
s
(
s
)
0 10 20 30 40 50 60
0
5
10
15
20
0 10 20 30 40 50 60
30
25
20
15
10
5
0
(ms)
P
u
i
s
s
a
n
c
e
(
d
B
)
0 10 20 30 40 50 60
30
25
20
15
10
5
(ms)
P
u
i
s
s
a
n
c
e
(
d
B
)
(c) (d)
Figure 1.6 Exemples de prols de puissance instantans et moyens de canaux rels. (a)
Mer Med. : D = 1000 m, B = 1 kHz, (b) mer Med. : D = 2500 m, B = 1 kHz (c) mer Med. :
D =5000 m, B =1 kHz (d) mer Med. : D =9000 m, B =1 kHz.
t
e
l
-
0
0
6
3
8
8
3
6
,
v
e
r
s
i
o
n
1
-
7
N
o
v
2
0
1
1
30
CHAPITRE 1. GNRALITS SUR LE MILIEU DE PROPAGATION ACOUSTIQUE
SOUS-MARIN
dB
30
25
20
15
10
5
0
(ms)
T
e
m
p
s
(
s
)
0 2 4 6 8 10 12 14
0
20
40
60
80
100
120
140
160
dB
30
25
20
15
10
5
0
(ms)
T
e
m
p
s
(
s
)
0 5 10 15
0
50
100
150
0 2 4 6 8 10 12 14
40
35
30
25
20
15
10
5
0
(ms)
P
u
i
s
s
a
n
c
e
(
d
B
)
0 2 4 6 8 10 12 14 16 18
35
30
25
20
15
10
5
0
(ms)
P
u
i
s
s
a
n
c
e
(
d
B
)
(e) (f)
Figure 1.7 Exemples de prols de puissance instantans et moyens de canaux rels. (e)
Ocan Atl. : D = 1000 m, f
c
= 17, 5 kHz, B = 2, 9 kHz (f ) ocan Atl. : D=2000 m, f
c
= 11, 2
kHz, B =1, 6 kHz.
t
e
l
-
0
0
6
3
8
8
3
6
,
v
e
r
s
i
o
n
1
-
7
N
o
v
2
0
1
1
CHAPITRE
2
Modle de canal entropie
maximale
pluralitas non est ponenda sine necessitate.
Guillaume dOckham
Dans ce chapitre, nous prsentons un modle de canal dispersif en temps et en fr-
quence bas sur le principe dentropie maximale initialement propos par Jaynes [Jaynes,
1957]. Aprs un bref rappel des fondements de ce principe, nous adaptons les travaux
de Debbah et al. [Debbah and Mller, 2005; Guillaud et al., 2007] sur les canaux radio-
frquences pour obtenir unmodle analytique des densits de probabilits marginales du
processus alatoire quest le canal ASM. Nous modlisons ensuite les uctuations tempo-
relles du canal par maximisationdu taux dentropie exprim en fonction du spectre Dop-
pler. Par construction, le modle propos est cohrent dans le sens o il ne repose que
sur une informationobjective de lenvironnement modliser. Par comparaison avec des
donnes relles, il est montr au travers de mesures de statistiques dvanouissement et
de taux derreur binaires, quune simple connaissance des statistiques du second ordre
(puissances moyennes, talement Doppler) peut tre sufsante pour obtenir un modle
pertinent pour tester des systmes de communication. On notera que le modle propos
dans ce chapitre se limite aux canaux stationnaires au sens strict.
2.1 Principe dentropie maximale
Le principe dentropie maximale, galement appel principe dumaximumdentropie,
est une mthode gnrale dinfrence inductive qui permet dattribuer un modle, ex-
prim sous forme de densit de probabilit, une quantit X partir dinformations par-
tielles sur cette quantit. Ce principe, introduit par Jaynes en1957 [Jaynes, 1957], peut tre
vucomme une extensionduprincipe dindiffrence
1
formalis par J. Bernoulli et Laplace.
Ce principe dindiffrence indique que sil ny a aucune raison de croire que, sur un en-
semble dvnements mutuellement exclusifs, un vnement est plus susceptible de se pro-
duire que tout autre, alors on doit supposer que tous les vnements sont qui-probables.
Dans un contexte baysien o la probabilit reprsente un tat de connaissance ou de
croyance, la distribution uniforme correspond alors ltat dignorance maximale.
Jaynes a tendu cette vision dinfrence au cas o une informationa priori I est dispo-
nible sur la variable alatoire X que lon cherche modliser. En se basant sur les axiomes
de Shannon [Shannon, 1948] qui interprte lentropie comme une mesure de la quantit
dincertitude dune densit de probabilit, Jaynes dmontre que parmi lensemble E des
densits de probabilits compatibles avec la connaissance I , la densit dentropie maxi-
1. aussi connu sous le nom de principe de raison insufsante
t
e
l
-
0
0
6
3
8
8
3
6
,
v
e
r
s
i
o
n
1
-
7
N
o
v
2
0
1
1
32 CHAPITRE 2. MODLE DE CANAL ENTROPIE MAXIMALE
male est la densit la moins arbitraire choisir pour modliser X. En dautres termes, la
densit
P
X|I
=argmax
pE
_
p(x) logp(x) dx, (2.1)
correspond la densit qui contraint le moins linformationinconnue sur X. Choisir toute
autre distribution entranerait lajout implicite dinformations subjectives sur X et serait
donc non cohrent
2
par rapport I .
Pour plus de dtails sur les desiderata de raisonnement plausible sur lesquels le
principe dentropie maximale repose, le lecteur peut se rfrer [Cox, 1946; Jaynes,
2003]. Des justications formelles duprincipe dentropie maximale sont disponibles dans
[Shore and Johnson, 1980; Jaynes, 1982]
3
.
2.2 Modlisation de la densit de probabilit du canal
2.2.1 Modle gaussien
La grande majorit des modles de propagation statistiques supposent que la r-
ponse impulsionnelle du canal est un processus gaussien [Cristol, 2005; Chitre, 2007;
van Walree et al., 2008; Qarabaqi and Stojanovic, 2009; Socheleau et al., 2009]. Lhypo-
thse sappuie gnralement sur largument physique selon lequel pour un retard x,
le signal reu est la somme de la contribution dun grand nombre de rexions diffuses.
Comme montr dans [Debbah and Mller, 2005], au lieu dtre suppose, la gaussianit
peut tre formellement justie la lumire du principe dentropie maximale.
Considrons notre canal comme unprocessus alatoire multi-vari de L trajets H(k) =
[h
0
(k), , h
L1
(k)]
T
o k reprsente lindice temporel. A titre dexemple, analysons le cas
o la seule information disponible sur le canal est quil soit stationnaire au sens strict et
dnergie nie
2
. En cohrence avec cette information limite, un modle de densit de
probabilit P(H) peut tre obtenu en maximisant lentropie du canal
_
P(H) logP(H)dH (2.2)
sous la contrainte
_
P(H)dH =1 and
_
L1
l =0
|h
l
|
2
P(H)dH =
2
. (2.3)
Les contraintes formalisent mathmatiquement notre connaissance sur le canal. Notez
que lindice k est volontairement omis lorsquil ny a pas de rfrences des proprits
temporelles. Ce problme de maximisation peut tre rsolu en utilisant les multiplica-
teurs de Lagrange
L(P) =
_
P(H) logP(H)dH +
_
1
_
P(H)dH
_
+
_
_
L1
l =0
|h
l
|
2
P(H)dH
_
(2.4)
2. au sens donne en introduction de la partie I
3. Malgr son intrt largement dmontr pour de nombreuses applications pratiques, la philosophie
du principe du maximum dentropie reste toujours polmique, voir [Ufnk, 1996] par exemple.
t
e
l
-
0
0
6
3
8
8
3
6
,
v
e
r
s
i
o
n
1
-
7
N
o
v
2
0
1
1
2.2. MODLISATION DE LA DENSIT DE PROBABILIT DU CANAL 33
et en annulant le drive fonctionnelle L(P)
L(P)
P
=logP(H) 1
L1
l =0
|h
l
|
2
=0. (2.5)
La rsolution du systme dquations (2.3) et (2.5) aboutit des trajets indpendants et
identiquement distribus (i.i.d) suivant une loi normale [Debbah and Mller, 2005], i.e.,
P(H) =
1
(
2
/L)
L
L1
l =0
e
L
|
h
l
|
2
2
. (2.6)
Contrairement la dnition classique de modles de canaux, la gaussianit ainsi que
lindpendance entre trajets nest pas une hypothse a priori mais la consquence de la
contrainte dnergie nie.
Pour afner notre modle, les approches de modlisation dveloppes par les acous-
ticiens peuvent se rvler trs utiles. Par exemple, laide de techniques bases sur le
trac de rayons [Porter and Bucker, 1987; Cristol, 2005], il est possible dobtenir le pro-
l de puissance du canal (cf. Figure 2.1) pour une conguration donne. Ceci implique
que pour chaque trajet l , nous pouvons connatre sa puissance moyenne relative p
l
=
E
_
|h
l
|
2
_
. En utilisant des modles comme [Cristol, 2005], cette puissance moyenne peut
mme tre dcompose comme la somme des puissances des diffuseurs et dune com-
posante spculaire telle que p
l
=
2
l
+|d
l
|
2
avec d
l
=E{h
l
} lexpression de la composante
spculaire et
2
l
=E{|h
l
d
l
|
2
}. Dans ce cas, la distributiondu canal qui maximise lentro-
pie devient
P(H) =
L1
l =0
1
(
2
l
)
e
|
h
l
d
l
|
2
2
l
. (2.7)
Ce rsultat indique que lorsque notre connaissance du canal est limite aux statistiques
dordre 1 et 2, le modle le moins arbitraire implmenter, au regard du principe den-
tropie maximale, est le modle gaussien. Une distributiongaussienne induit alors un va-
nouissement de Rice ou de Rayleigh en fonction de la valeur de d
l
. Contraindre le modle
avec des statistiques dordre suprieur rsulterait en une distribution diffrente. Cepen-
dant, dans la pratique, notre connaissance se limite souvent des statistiques dordre 2
et comme montr dans la section 2.4, cette connaissance peut savrer sufsante pour
aboutir un modle satisfaisant.
2.2.2 Paramtres incertains
Le modle obtenu lquation 2.7 suppose que tous les paramtres dentre repr-
sentant notre tat de connaissance du canal sont connus de faon dterministe. Lors de
lutilisationdun modle, il arrive cependant que lon soit seulement en mesure de borner
notre connaissance sur le canal. Un des cas les plus pertinents en pratique correspond
la situation o en labsence de donnes relles et sans accs des modles trs avancs
comme [Cristol, 2005], il nest pas possible de connatre
2
l
et |d
l
|
2
avec prcision. Pour des
environnements petit-fond et partir de considrations physiques rudimentaires bases
sur les lois de Snell-Descartes et la formule de Thorp (cf. [Stojanovic, 2008] par exemple),
t
e
l
-
0
0
6
3
8
8
3
6
,
v
e
r
s
i
o
n
1
-
7
N
o
v
2
0
1
1
34 CHAPITRE 2. MODLE DE CANAL ENTROPIE MAXIMALE
0 1 2 3 4 5 6
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
(ms)
P
u
i
s
s
a
n
c
e
m
o
y
e
n
n
e
r
e
l
a
t
i
v
e
Figure 2.1 Exemple de prol de puissance obtenu par trac de rayons. Lmetteur et le
rcepteur sont respectivement immergs 20 et 5 m et spars de 1 km.
il est gnralement possible dobtenir une bonne approximation de la puissance p
l
de
chaque trajet et de la phase
l
de sa composante spculaire
4
. Cependant la rpartition
de la puissance p
l
entre la composante spculaire et la composante alatoire (diffuse) est
rarement connue exactement. Nanmoins, avec un peu dexprience on peut borner le
ratio K
l
= |E{h
l
}|
2
/E{|h
l
d
l
|
2
} par des valeurs K
min
et K
max
. Comme illustr dans le cha-
pitre suivant, ce ratio uctue par exemple entre 0 et 30 pour les canaux mditerranens
montrs au chapitre 1 et peut tre suprieur 600 pour des canaux plus stables. Le mo-
dle dentropie maximale se formule alors avec des contraintes reprsentes sous forme
dingalits
max
P(H)
_
P(H) logP(H)dH,
avec 0 l <L,
_
_
K
min
|E{h
l
}|
2
E{|h
l
d
l
|
2
}
K
max
E{|h
l
|
2
} =p
l
,
E{h
l
} =
l
.
(2.8)
De manire quivalente, les contraintes de maximisation peuvent aussi scrire
0 l <L,
_ _
p
l
K
min
K
min
+1
E{h
l
}e
j
l
_
p
l
K
max
K
max
+1
,
p
l
K
max
+1
E{|h
l
E{h
l
}|
2
}
p
l
K
min
+1
.
(2.9)
Contrairement (2.7), E{h
l
} et E{|h
l
E{h
l
}|
2
} ne sont pas dtermins ici par des valeurs
dterministes, la connaissance du canal est uniquement reprsente par K
min
, K
max
et p
l
.
En drivant la fonctionnelle P(H) et en utilisant les conditions de Karush-Kuhn-Tucker
[Bonnans et al., 2006], il vient que P(H) sexprime comme dans (2.7) avec
2
l
=
p
l
K
min
+1
et
d
l
=
_
p
l
K
min
K
min
+1
e
j
l
. Le canal tant uniquement contraint par des statistiques dordre 1 et 2,
4. A chaque rexion fond ou surface, on peut supposer que la composante spculaire est dphase de
.
t
e
l
-
0
0
6
3
8
8
3
6
,
v
e
r
s
i
o
n
1
-
7
N
o
v
2
0
1
1
2.3. MODLISATION DES FLUCTUATIONS TEMPORELLES DU CANAL 35
ce rsultat correspond la distribution gaussienne dont le dterminant de la matrice de
covariance est le plus grand par rapport aux contraintes xes.
Mme si elle maximise lentropie du modle de canal, cette approche est limite dans
son application. En effet, quelles que soient les valeurs de K
min
et K
max
, la distribution
rsultante de (2.8) sera toujours indpendante de notre connaissance sur K
max
. Une alter-
native de modlisation, inspire du travail de Guillaud et al. sur les canaux MIMO radio-
frquences [Guillaud et al., 2007], consiste exploiter le principe dentropie maximale
tout en sassurant que le domaine des valeurs possibles pour K
l
soit explor au maximum.
La dmarche est la suivante :
1. A partir du principe dentropie maximale et dune certaine connaissance de K
l
(re-
prsente par K
min
et K
max
dans notre exemple), induire la densit de probabilit
P
K
l
(K).
2. A partir du principe dentropie maximale, induire le modle P
H|K
l
(H, K) qui suppose
K
l
connu.
3. Marginaliser P
H,K
l
(H, K) =P
H|K
l
(H, K)P
K
l
(K) pour obtenir P(H) :
P(H) =
_
R
+
P
H|K
l
(H, K)P
K
l
(K)dK. (2.10)
Si la seule information disposition sur K
l
est formalise par les bornes K
min
et K
max
,
on peut montrer que la distribution P
K
l
(K) qui maximise lentropie est uniforme sur
[K
min
; K
max
] [Cover and Thomas, 1991, ch. 12]. Si K
min
et K
max
sont choisis indpendam-
ment de l , alors P
K
l
(K) =P
K
(K) pour tout l . La distributionP
H|K
l
(H, K) =P
H|K
(H, K) sex-
prime quant elle comme (2.7) avec
2
l
=
p
l
K+1
et d
l
=
_
p
l
K
K+1
e
j
l
. Par consquent, le mo-
dle obtenu en utilisant cette mthode de marginalisation du paramtre incertain scrit
P(H) =
_
K
max
K
min
L1
l =0
K +1
p
l
(K
max
K
min
)
e
K+1
p
l
h
l
_
p
l
K
K+1
e
j
l
2
dK. (2.11)
Contrairement (2.8), ce modle ne maximise pas lentropie au regard de notre
connaissance du canal. Ceci est illustr la gure 2.2 o les entropies de P(H), obte-
nue par (2.8) et (2.11), sont compares en fonction de K
max
pour un canal mono-trajet,
K
min
tant x 0. La covariance et de ce fait lentropie de P
H|K
(H, K) tant une fonc-
tion dcroissante de K, il est attendu que lentropie de P(H) obtenue par marginalisation
diminue avec K
max
. Comme nous allons le voir dans la section 2.4 de ce chapitre, la m-
thode de marginalisation peut aboutir un modle plus raliste que le modle rsultant
de (2.8).
2.3 Modlisation des uctuations temporelles du canal
Les rexions que nous avons menes jusqu prsent sur la modlisation de canal
nintgrent que trs sommairement la dimensiontemporelle du processus alatoire H(k).
Nous avons voqu lhypothse de stationnarit au sens strict de ce processus la sec-
tion 2.2.1, savoir que pour tout k
1
et k
2
Z la distribution de H(k
1
) est gale celle de
t
e
l
-
0
0
6
3
8
8
3
6
,
v
e
r
s
i
o
n
1
-
7
N
o
v
2
0
1
1
36 CHAPITRE 2. MODLE DE CANAL ENTROPIE MAXIMALE
0 10 20 30 40 50 60 70 80 90 100
1.5
1
0.5
0
0.5
1
1.5
2
2.5
K
max
E
n
t
r
o
p
i
e
(
n
a
t
s
)
mthode avec marginalisation
mthode de lentropie maximale
Figure 2.2 Comparaison de lentropie du modle obtenu par (2.8) et (2.11) en fonction
de K
max
. L =1, p
l
=1 et K
min
=0.
H(k
2
), mais nous navons pas encore propos de modle pour la distribution conjointe
de H(k
1
), H(k
2
), , H(k
n
). Une bonne caractrisation de cette distribution conjointe est
primordiale pour notre modle puisque la conception et les performances des systmes
de communication sont fortement impactes par les uctuations temporelles du canal.
Nous allons voir dans cette section que le principe dentropie maximale savre, encore
une fois, trs utile pour modliser ces uctuations.
Quelle que soit notre connaissance sur le canal permettant daboutir aux modles
(2.6), (2.7), (2.8) ou (2.11), la maximisation de lentropie nous indique que les trajets
doivent tre modliss comme indpendants. Par consquent, lentropie conjointe du
processus alatoire multi-vari H(k) peut tre exprime comme la somme de lentropie
de chacun des processus {h
l
(k)}
k
. Ainsi, maximiser lentropie globale de H(k) revient
maximiser lentropie des diffrents {h
l
(k)}
k
indpendamment. Pour cette raison et par
souci de lisibilit, lindice l sera volontairement omis dans cette section.
Dune manire gnrale, lentropie ou plus exactement le taux dentropie dun pro-
cessus alatoire {X(k)} est dni comme [Cover and Thomas, 1991, ch. 4]
h
R
= lim
n
1
n
h
E
_
X(1), X(2), , X(n)
_
, (2.12)
o h
E
_
_
dsigne lentropie diffrentielle. Pour tre cohrent avec le principe dentropie
maximale, notre objectif est maintenant de trouver, pour chaque trajet, la distribution
conjointe de h(k
1
), h(k
2
), , h(k
n
) qui maximise le taux dentropie h
R
soumis un en-
semble de contraintes qui traduisent ltat de nos connaissances sur les uctuations tem-
porelles du canal.
A lexception de (2.11), tous les rsultats de la section 2.2 indiquent que H(k) doit tre
modlis comme un processus gaussien pour tre cohrent avec notre connaissance du
canal. Dans le cas gaussien stationnaire, la dynamique temporelle du processus peut non
seulement tre reprsente par la distribution conjointe de toutes ses variables mais elle
est aussi entirement dtermine par son spectre Doppler S() dni comme
t
e
l
-
0
0
6
3
8
8
3
6
,
v
e
r
s
i
o
n
1
-
7
N
o
v
2
0
1
1
2.3. MODLISATION DES FLUCTUATIONS TEMPORELLES DU CANAL 37
S() =
+
u=
E
_
_
h(k) E{h(k)}
__
h(k +u) E{h(k +u)}
_
_
e
2j u
. (2.13)
Reprsenter les uctuations temporelles du canal laide de S() plutt quavec la
distribution conjointe des variables du processus h(k) se rvle trs intressant dans
notre cas. En effet, Kolmogorov a montr que le taux dentropie dun processus ala-
toire gaussian discret h(k) peut sexprimer en fonction de son spectre Doppler tel que
[Cover and Thomas, 1991, ch. 12]
h
R
=
1
2
log(2e) +
1
2
_
1/2
1/2
logS()d. (2.14)
Le processus h(k) est ici implicitement suppos chantillonn une priode qui vrie
la thorme de Shannon tel que S() ait un support normalis born [
min
,
max
] avec
1/2
min
max
1/2. Le modle que lon cherche obtenir consiste donc trou-
ver S() qui maximise (2.14) partir de linformation dont on dispose sur les uctuations
temporelles du canal. En gnral, cette information peut se formaliser, pour chaque tra-
jet, comme un ensemble de moments spectraux
p
de fonctions connues m
p
(), p P
o P reprsente lensemble des ordres de contrainte, i.e.
p
=
_
max
min
m
p
()S()d. (2.15)
Notre problme est trs analogue la mthode destimation spectrale base sur
le principe dentropie maximale propose par Burg dans [Burg, 1975]. Cette mthode
cherche trouver S() qui maximise (2.14) partir de la connaissance de N points qui-
distants de la fonctiondautocovariance du processus modliser. Dans ce cas,
p
corres-
pond la fonction dautocovariance
p
=E
_
_
h(k)E{h(k)}
__
h(k+p)E
_
h(k +p)
__
_
qui
peut aussi tre exprime comme un moment trigonomtrique spectral tel que m
p
() =
e
2j p
et P ={0, 1, , N1}. Cette reprsentationdu canal qui ncessite la connaissance
de N points dautocovariance nest pas adapte notre contexte o lon cherche mod-
liser le canal de faon concise, cest dire avec un minimumde paramtres. Un raccourci
vers la modlisationconcise pourrait tre de choisir N petit, mais cela peut ne pas tre une
bonne option car on risque de ne pas caractriser le canal avec une prcision sufsante.
Une autre approche consiste exprimer ltat de nos connaissances sur les uctuations
temporelles du canal en termes de moments gomtriques tel que m
p
() =
p
. Dans un
contexte ASM, une telle reprsentation prsente trois avantages :
1. Les moments gomtriques sont faciles interprter physiquement de sorte que
leurs ordres de grandeur sont gnralement connus pour un environnement donn.
Typiquement,
0
est la puissance moyenne totale de h(k),
1
est le barycentre
de S() et
2
est homogne au carr de ltalement Doppler
rms
avec
rms
=
_
2
/
0
(
1
/
0
)
2
.
2. Ils sont faciles estimer lorsque lon dispose de donnes relles.
3. Ils sont informatifs dans le sens o peu de moments sont ncessaires pour obtenir
un modle prcis (cf. section 2.4 ).
t
e
l
-
0
0
6
3
8
8
3
6
,
v
e
r
s
i
o
n
1
-
7
N
o
v
2
0
1
1
38 CHAPITRE 2. MODLE DE CANAL ENTROPIE MAXIMALE
On notera quil est aussi possible de reprsenter les uctuations temporelles du canal par
des considrations spatiales sur les angles de dpart (resp. darrive) entre les diffuseurs et
le transducteur dmission (resp. rception) comme dans [Debbah and Mller, 2005, Eq.
(90)]. Cependant, dans un contexte SISO, les distributions sur ces angles sont rarement
connues, on prfrera donc la reprsentation sous forme de moments spectraux.
A partir de (2.14) et (2.15), le spectre Doppler de chaque trajet est obtenu en rsolvant
le problme doptimisation suivant
max
S()
_
max
min
logS()d,
avec
_
max
min
p
S()d =
p
, p P. (2.16)
De la mme manire que dans la section prcdente, la solution est obtenue grce aux
multiplicateurs de Lagrange
L(S) =
_
logS()d
pP
p
_
p
S()d
_
. (2.17)
En drivant L(S) par rapport S, on obtient
S() =
1
pP
p
p
. (2.18)
Les multiplicateurs
p
sont ensuite obtenus partir de lensemble des quations
_
max
min
pP
p
p
d =
q
, q P. (2.19)
En fonction de lensemble P, une solutionanalytique dun tel systme dquations est en
gnral difcile obtenir. Par consquent, pour faciliter le calcul des multiplicateurs
p
,
une approche numrique comme celle prsente lannexe A est prconise.
Comme indiqu prcdemment, le modle (2.18) est thoriquement valable unique-
ment pour les processus gaussiens et ne devrait donc pas sappliquer au processus issu
de la mthode (2.11) de marginalisationdu paramtre K. Cependant, trouver une expres-
sion analytique du taux dentropie du processus issu de (2.11) semble tre difcile. Par
consquent, nous proposons tout de mme dapprocher la relation qui lie les diffrentes
variables h(k
1
), h(k
2
), , h(k
n
) par le spectre Doppler donn par (2.18). Cette approxima-
tion peut tre justie comme suit : lorsque K
max
tend vers K
min
, la densit de probabilit
P(H) de lquation (2.11) tend vers P
H|K
(H, K) qui est gaussienne et lorsque K
max
est lar-
gement suprieur K
min
, lentropie devient rapidement trs faible (cf. gure 2.2) de sorte
quune approximation sur la distribution conjointe du processus H(k) ne devrait avoir
que trs peu dimpact sur lutilisation qui est faite du modle. Une autre manire de voir
cette approximation est de considrer que lon maximise une borne suprieure, donne
par (2.14), du taux dentropie du modle issu de (2.11) au lieu de maximiser le taux den-
tropie rel.
t
e
l
-
0
0
6
3
8
8
3
6
,
v
e
r
s
i
o
n
1
-
7
N
o
v
2
0
1
1
2.4. ILLUSTRATIONS 39
2.4 Illustrations
2.4.1 Comparaison avec des donnes relles
Comme soulign dans lintroductionde la partie I, le modle nest pas destin repr-
senter la ralit physique du canal, mais plutt un tat de connaissance de cette ralit.
Une question cruciale est alors de dterminer la quantit dinformation dont le modle
a besoin pour caractriser lenvironnement modliser avec sufsamment de prcision.
La rponse dpendbien entendude ce que nous avons lintentionde faire avec le modle.
En communications ASM, les simulateurs de canaux sont principalement employs
5
1. pour aider la conception de systmes de communication,
2. pour mesurer leurs performances en termes de taux derreur binaire (TEB).
Par consquent, pour valuer la mthode de modlisation entropie maximale, nous sug-
grons
1. de comparer les statistiques dvanouissement dun canal rel sond en mer avec
celles des diffrents modles dvelopps dans ce chapitre,
2. de comparer le TEB dun systme de communication donn lorsquil est confront
au canal rel et lorsquil est confront aux modles.
Idalement, nous voudrions caractriser le canal avec le minimum de paramtres pos-
sibles an dobtenir un modle simple utiliser. En rgle gnrale et comme discut dans
ce chapitre, linformation disponible sur le canal se limite des statistiques dordre deux
au plus. La gure 2.3 montre la rponse impulsionnelle du canal
6
qui va servir de r-
frence pour notre valuation. Ce canal a t sond en Atlantique 17,5 kHz dans une
bande de 3 kHz. A laide des mtriques dvanouissement et de TEB, notre objectif est
dvaluer la quantit dinformation dont le modle a besoin pour sapprocher au mieux
du comportement du canal rel. Pour ce faire, nous avons estim diffrents moments du
canal partir de la rponse impulsionnelle de la gure 2.3 et avons inject ces paramtres
dans le modle. p
l
est estim en moyennant la puissance instantane de chaque trajet,
2
(homogne ltalement Doppler) est estim en utilisant lalgorithme prsent dans
[Bello, 1965] (pour p = 1 et p > 2, les moments
p
sont supposs inconnus). La rap-
port de puissance K entre la composante spculaire et de la composante alatoire de
chaque trajet est estim en appliquant la mthode des moments de [Abdi et al., 2001].
La frquence Doppler maximale
max
est mesure partir de la mthode prsente dans
[Holtzman and Sampath, 1995], on suppose
min
=
max
.
Au cours de la phase de conception des systmes de communication, la slection de
codes correcteurs derreurs et dentrelaceurs est principalement dicte par les statistiques
derreurs par paquets. Ces statistiques sont entre autres donnes par le LCR(level crossing
rate) qui caractrise la svrit de lvanouissement dans le temps. LCR() correspond
au nombre moyen dvnements dvanouissement infrieurs par unit de temps et
sexprime en terme de probabilit comme
LCR() =P
_
r (k) , r (k 1) <
_
. f
s
, (2.20)
5. comme illustr au chapitre 4, les modles peuvent aussi tre utiliss pour estimer la capacit.
6. lvolution de son prol de puissance au cours du temps pour tre plus prcis.
t
e
l
-
0
0
6
3
8
8
3
6
,
v
e
r
s
i
o
n
1
-
7
N
o
v
2
0
1
1
40 CHAPITRE 2. MODLE DE CANAL ENTROPIE MAXIMALE
dB
30
25
20
15
10
5
0
(ms)
t
(
s
)
0 2 4 6 8 10 12 14
0
10
20
30
40
50
60
Figure 2.3 Exemple de canal sond en Atlantique 17.5 kHz dans 3 kHz de bande. La
frquence Doppler maximale est estime 6,2 Hz, ltalement Doppler de chaque trajet
varie entre 0.7 et 3,8 Hz et K estim est compris entre 0 et 32.
o r (k) = |
l
h
l
(k l )| et f
s
est la frquence dchantillonnage. Les gures 2.4-(a) et (b)
comparent les LCR obtenus pour diffrents degrs de connaissance sur le canal. La gure
2.4-(a) value limpact du choix du modle de densit de probabilit alors que la gure
2.4-(b) sintresse au modle des uctuations temporelles.
Plus prcisment, la gure 2.4-(a) compare les diffrents modles de densit de pro-
babilit prsents la section 2.2 en supposant une bonne connaissance des uctuations
temporelles du canal (i.e.
2
,
min
et
max
sont spcis en entre du modle partir des
valeurs estimes sur la rponse impulsionnelle originale). Le LCR mesur sur la rponse
impulsionnelle originale est aussi trac titre de rfrence. Cette rponse impulsionnelle
correspondant une seule observation dun processus alatoire sur une dure limite,
son LCR est estim avec une variance importante contrairement aux statistiques issues
des modles entropie maximale qui sont ici moyennes sur 1000 ralisations. Comme
attendu, plus on dispose dinformations sur le canal et plus le modle se rapproche de la
ralit. Le modle (2.7) qui intgre la connaissance de la puissance des composantes ala-
toires et spculaires se trouve tre le plus conforme aux donnes relles. On peut aussi
remarquer sur la gure 2.4-(a), que les modles (2.8) et (2.11) qui disposent de la mme
information sur le canal prsentent des rsultats bien distinctifs. Ces deux modles sont
caractriss par leur connaissance incertaine du rapport de puissance K. Pour les simu-
lations K
min
a t x 0 et K
max
32, ce qui correspond aux valeurs extrmes mesures
sur la rponse impulsionnelle relle. Malgr lentorse que le modle (2.11) reprsente par
rapport au concept dentropie maximale, celui-ci savre tre plus pertinent que (2.8) car,
comme expliqu la section 2.2.2, il explore tout le domaine des valeurs possibles pour
K.
La gure 2.4-(b) value limpact des connaissances des uctuations temporelles sur le
LCR pour trois scnarios diffrents. Pour chacun de ces scnarios, le modle de densit
de probabilit est donn par (2.7). Le premier cas correspond la situation o
2
,
min
et
t
e
l
-
0
0
6
3
8
8
3
6
,
v
e
r
s
i
o
n
1
-
7
N
o
v
2
0
1
1
2.4. ILLUSTRATIONS 41
20 15 10 5 0 5 10
10
5
10
4
10
3
10
2
10
1
10
0
10
1
10
2
(dB)
L
C
R
(
s
1
)
Canal rel
Modle (2.7)+(2.18)
Modle (2.8)+(2.18)
Modle (2.11)+(2.18)
(a)
20 15 10 5 0 5 10
10
5
10
4
10
3
10
2
10
1
10
0
10
1
10
2
(dB)
L
C
R
(
s
1
)
Canal rel
Modle (2.7)+(2.18),
max
et
2
connus
Modle (2.7)+(2.18),
max
connu,
2
=1/8
Modle (2.7)+(2.18),
max
et
2
inconnus
(b)
Figure 2.4 Comparaisondes LCRmesurs pour plusieurs modles dentropie maximale
obtenus partir de diffrents degrs de connaissance du canal. (a) Impact du modle de
densit de probabilit, (b) impact du modle des uctuations temporelles.
max
sont connus. Le deuxime scnario considre
min
et
max
connus et
2
choisi de fa-
on plus ou moins arbitraire gale 1/8. Ce choix de 1/8 correspond au second moment
du spectre Doppler de Jakes communment utilis en radio-mobile et parfois en ASM
de faon injustie [Qu and Yang, 2008; Byun et al., 2007; Hwang and Schniter, 2009]
7
. Le
troisime scnario traduit labsence quasi-totale dinformation sur la dynamique tempo-
relle du canal. Le terme quasi exprime lide que, mme si
2
,
min
et
max
ne sont pas
connus, il est toujours possible de borner la dynamique du canal par des considrations
physiques. Typiquement,
max
peut tre majore par
limite
qui est obtenue partir de la
connaissance de la frquence porteuse de transmission f
c
, de la vitesse de propagation
des ondes acoustiques c et de la vitesse relative maximale entre lmetteur et le rcepteur
v
limite
, soit
limite
= v
limite
f
c
/c. Pour les simulations, v
limite
a t xe 2 m.s
1
ce qui im-
plique
limite
= 23.3 Hz pour une clrit de 1500 m.s
1
. Lorsque seule
max
est connue,
7. Pour plus dtails sur la relation entre le principe dentropie maximale et le spectre de Jakes, le lecteur
peut se rfrer nos travaux prsents dans [Socheleau et al., 2010].
t
e
l
-
0
0
6
3
8
8
3
6
,
v
e
r
s
i
o
n
1
-
7
N
o
v
2
0
1
1
42 CHAPITRE 2. MODLE DE CANAL ENTROPIE MAXIMALE
0 2 4 6 8 10 12 14
10
6
10
5
10
4
10
3
10
2
10
1
10
0
Eb/N0 (dB)
T
E
B
Canal rel
Modle (2.7)+(2.18)
Modle (2.8)+(2.18)
Modle (2.11)+(2.18)
(a)
0 2 4 6 8 10 12 14
10
6
10
5
10
4
10
3
10
2
10
1
10
0
Eb/N0 (dB)
T
E
B
Canal rel
Modle (2.7)+(2.18),
max
et
2
connus
Modle (2.7)+(2.18),
max
connu,
2
=1/8
Modle (2.7)+(2.18),
max
et
2
inconnus
(b)
Figure 2.5 Comparaisondes TEBmesurs pour plusieurs modles dentropie maximale
obtenus partir de diffrents degrs de connaissance du canal. (a) Impact du modle de
densit de probabilit, (b) Impact du modle des uctuations temporelles.
on peut montrer que le spectre qui maximise le taux dentropie (2.14) est un spectre Dop-
pler plat de support [
max
,
max
] (cf. [Socheleau et al., 2010]). De faon similaire aux
valuations de la gure 2.4-(a), la gure 2.4-(b) montre que plus la connaissance des uc-
tuations temporelles est prcise et plus le modle entropie maximale se rapproche du
canal rel.
Pour illustrer davantage le comportement des modles issus du principe dentropie
maximale, nous avons mesur le TEB sans codage canal dun lien de communication
QPSK
8
lorsquil est confront aux diffrents modles. Ce type de lien a t choisi ici car il
correspond ce qui est actuellement implment dans la plupart des modems commer-
cialiss. Le TEB est valu en fonction du rapport Eb/N0 o Eb est lnergie par bit et N0
la densit spectrale de bruit. Les gures 2.5-(a) et (b) montrent les TEB obtenus pour des
degrs de connaissance du canal identiques ceux associs la gure 2.4. Ces rsultats
8. Le rcepteur est ici constitu dun annuleur dinterfrence pilot par les donnes avec un suivi de
phase conjoint.
t
e
l
-
0
0
6
3
8
8
3
6
,
v
e
r
s
i
o
n
1
-
7
N
o
v
2
0
1
1
2.4. ILLUSTRATIONS 43
corroborent les mesures effectues sur le LCR et mettent en vidence limportance de la
connaissance des paramtres K et
2
. On notera que mme lorsque le modle (2.7) avec
connaissance de
2
et
max
est implment, il subsiste un cart de TEB avec le canal rel
pour de forts Eb/N0. Cet cart peut sexpliquer par la combinaison de trois phnomnes
distincts. Premirement, la rponse impulsionnelle originale correspond une seule ob-
servationde dure limite duprocessus alatoire quest le canal et par consquent lincer-
titude relative destimation du TEB crot mesure que le TEB diminue. Deuximement,
les valeurs des paramtres dentre du modle sont issues destimationsur le signal rel et
ne sont donc pas des valeurs exactes. Enn, la connaissance suppose du canal exprime
au travers des contraintes prsentes aux sections 2.2 et 2.3 na pas la prtention dtre
exhaustive et peut rvler ses limites pour de faibles TEB.
2.4.2 Limitations du modle
La modlisation de canal base du principe dentropie maximale offre le principal
avantage de rpondre trois exigences fondamentales de modlisation :
1. cohrence-le modle ne repose que sur une connaissance objective de lenvironne-
ment modliser,
2. concision-relativement peu de paramtres sont ncessaires pour caractriser assez
prcisment un canal doublement dispersif,
3. ouverture-le modle est volutif, il peut tre mis jour chaque fois quune nouvelle
information sur lenvironnement modliser est disponible.
Malgr ces caractristiques intressantes, le principe dentropie maximale peut se mon-
trer difcile manipuler lorsque les proprits statistiques du canal sont un peu origi-
nales . Comme nous allons le voir dans le chapitre suivant, le canal ASM nest pas n-
cessairement stationnaire au sens strict comme suppos dans ce chapitre. De plus, il est
communment admis que les mouvements de lmetteur et du rcepteur tendent cor-
rler la partie uctuante des diffrents trajets dun mme canal, ce qui remet en cause
lindpendance des trajets induite lors de la construction des modles prsents dans
ce chapitre. Le principe dentropie maximale peut en thorie intgrer ces contraintes de
non-stationnarit et de corrlations entre trajets. La difcult consiste alors reprsenter
simplement cette information et pouvoir spcier si possible des valeurs numriques
aux paramtres rsultants de cette nouvelle information. Ceci peut savrer quelque peu
dlicat lorsque la corrlation entre trajets est un tenseur trois dimensions par exemple
(cf. chapitre suivant).
Dans notre contexte ASM, il ne nous a pas sembl pertinent de pousser le principe
dentropie maximale si loin car son formalisme et les outils mathmatiques quil requiert
apparaissent trs vite complexes manipuler
9
. La vocation que nous voulons donner au
modle de canal bas sur le principe dentropie maximale est une vocation de modle
synthtique utilis dans les premires phases dtude et de dveloppement dun sys-
tme de communication. Pour une modlisation au plus proche de la ralit physique,
9. Le lecteur intress pourra se rfrer aux travaux de Guillaud et al. [Guillaud et al., 2007] qui utilisent
le principe dentropie maximale de faon avance pour la modlisation de canaux MIMOavec une connais-
sance non dterministe de la corrlation entre antennes.
t
e
l
-
0
0
6
3
8
8
3
6
,
v
e
r
s
i
o
n
1
-
7
N
o
v
2
0
1
1
44 CHAPITRE 2. MODLE DE CANAL ENTROPIE MAXIMALE
nous prsentons dans le chapitre suivant un modle de canal pilot par des donnes
relles qui repose, contrairement lapproche de modlisation adopte jusquici, sur un
formalisme dinfrence empirique. Ce formalisme offre lavantage dtre simple utiliser
mais ncessite un peu dintuition et beaucoup de donnes sur le canal modliser.
t
e
l
-
0
0
6
3
8
8
3
6
,
v
e
r
s
i
o
n
1
-
7
N
o
v
2
0
1
1
CHAPITRE
3
Rejeu stochastique de canal
You have to learn the rules of the game. And then you
have to play better than anyone else.
Albert Einstein
Pour exploiter pleinement les exprimentations en mer dans des conditions de labo-
ratoire contrles et reproductibles, un modle de canal pilot par des donnes relles est
propos dans ce chapitre. Ce modle repose sur lhypothse selon laquelle uncanal sond
en mer est une observationdun processus alatoire sous-jacent. Apartir de cette mesure,
les proprits statistiques du canal sont analyses an de pouvoir gnrer en laboratoire
de nouvelles ralisations du processus observ. Sur la base de lanalyse de donnes re-
cueillies dans locan Atlantique et la mer Mditerrane, nous relchons lhypothse de
stationnarit au sens strict (et mme au sens large) invoque dans le chapitre prcdent
et par la plupart des modles existants [van Walree et al., 2008; Galvin and Coats, 1996].
Nous montrons tout dabord, grce la dcomposition modale empirique, quun modle
stationnaire en tendance correspond aux donnes analyses. Contrairement ltat de
lart sur le sujet, les trajets diffus sont ensuite supposs potentiellement corrls, de sorte
que les vritables statistiques du second ordre du canal sont prises en compte par notre
modle. Enn, des scnarios de test illustrent les avantages durejeustochastique de canal
pour la conception et la validation de systmes de communication.
3.1 Infrence empirique
Contrairement au chapitre prcdent, toute la construction du modle propos dans
ce chapitre repose sur linterprtation de donnes relles et plus particulirement sur les
donnes issues des exprimentations prsentes la section 1.3.5. La mthodologie de
modlisation adopte ici est assez subjective car elle se base principalement sur lintui-
tion et non sur linduction. Cependant, comme nous allons le voir par la suite, ce type
dapproche a le mrite daboutir un modle de canal relativement simple intgrant
des proprits statistiques assez complexes comme la non-stationnarit ou la corrlation
entre trajets.
3.1.1 Canal stationnaire en tendance
Lhypothse de stationnaritau sens large du canal est souvent admise pour simplier
les modles de propagation (cf. [Cristol, 2005; Geng and Zielinski, 1995; van Walree et al.,
2008]). Elle peut snoncer sous la forme suivante : pour tout 0 l L 1 et pour tout k,
t
e
l
-
0
0
6
3
8
8
3
6
,
v
e
r
s
i
o
n
1
-
7
N
o
v
2
0
1
1
46 CHAPITRE 3. REJEU STOCHASTIQUE DE CANAL
k
1
and k
2
Z
E{h
l
(k
1
)} = E{h
l
(k
2
)} , (3.1)
E
_
|h
l
(k
1
)|
2
_
= E
_
|h
l
(k
2
)|
2
_
<, (3.2)
E
_
h
l
(k
1
)h
l
(k
2
)
_
= E
_
h
l
(k)h
l
(k +k
2
k
1
)
_
. (3.3)
Bien que le concept soit bien dni en thorie, tester la stationnarit sur des donnes
relles nest pas direct. La stationnarit se rfre une invariance des proprits statis-
tiques au cours du temps, mais une pratique courante considre gnralement cette in-
variance dans un sens plus large, par rapport une chelle dobservation. Dans la suite de
ce chapitre, nous rfrenons donc la stationnarit par rapport lchelle dobservation.
Certaines tudes comme [Tomasi et al., 2011], montrent que lorsque lmetteur et le
rcepteur sont xes, le canal peut tre stationnaire au sens large sur des dures de plu-
sieurs minutes. Cependant lorsque les lments communiquants sont en mouvement,
cette proprit nest plus ncessairement vraie. En effet, la rponse impulsionnelle du
canal ASM tant dpendante de la topologie du milieu, de la distance TX-RX, de la pro-
fondeur dimmersion etc., ces grandeurs ou caractristiques sont dpendantes du mou-
vement de lmetteur et du rcepteur et peuvent faire varier les proprits statistiques du
canal au cours du temps. En analysant lenveloppe de canaux ASM rels, nous pouvons
conjecturer certaines proprits sur la stationnarit du canal. Par exemple, la gure 3.1
montre lvolution temporelle de lenveloppe des trois trajets les plus puissants du ca-
nal (f) de la gure 1.7. La gure 3.1 suggre que les signaux se propageant au travers du
canal ASM sont affects par des phnomnes dvanouissement de diffrentes chelles
temporelles. Lvanouissement est gnralement quali de lent ou rapide en rfrence
la vitesse laquelle lamplitude et la phase du canal uctuent par rapport aux contraintes
temporelles imposes sur lapplication qui utilise le canal. Par exemple, on peut compa-
rer le temps de cohrence du canal par rapport la dure dun mot de code, dun paquet
de donnes voire mme dun temps symbole. Les vanouissements rapides sont prdo-
minants dans la conception de systmes de communication car les paramtres de trans-
mission et les algorithmes de rception doivent tre adapts ses caractristiques pour
assurer de bonnes performances. Les vanouissements lents ne reprsentent quune va-
riation long terme du rapport signal sur bruit dont limpact sur les performances de
rception est gnralement bien connu analytiquement [Proakis, 2001]. La gure 3.1 in-
dique que lhypothse de stationnarit au sens large nest pas vrie sur notre chelle
dobservation car la moyenne locale de lenveloppe des trajets uctue dans le temps. A
contrario, les statistiques du second ordre semblent elles tre invariantes. Ces observa-
tions suggrent deux hypothses de modlisation :
Hypothse 3.1.1 Les vanouissements lents et rapides sont combins de faon additive.
Hypothse 3.1.2 Le canal ASMest un processus alatoire stationnaire en tendance, tel que
chaque trajet vrie
h
l
(k) =d
l
(k) +
l
(k) (3.4)
avec, pour tout k, k
1
et k
2
Z
E{h
l
(k)} =d
l
(k), (3.5)
t
e
l
-
0
0
6
3
8
8
3
6
,
v
e
r
s
i
o
n
1
-
7
N
o
v
2
0
1
1
3.1. INFRENCE EMPIRIQUE 47
et
E
_
_
h
l
(k
1
) E{h
l
(k
1
)}
__
h
l
(k
2
) E{h
l
(k
2
)}
_
_
= E
_
l
(k
1
)
l
(k
2
)
_
= E
_
l
(k)
l
(k +k
2
k
1
)
_
. (3.6)
d
l
(k) est appele la tendance qui est une composante pseudo-cohrente qui se com-
porte quasiment comme si le milieu tait dterministe et
l
(k) est un processus ala-
toire stationnaire au sens large de moyenne nulle. d
l
(k) peut tre interprte comme la
contributionde phnomnes pseudo-dterministes sur les uctuations du canal. A notre
chelle dobservation (entre 30 et 160 secondes), ces phnomnes rsultent principale-
ment de la variation de distance et de profondeur, de londulationdes vagues ou des ph-
nomnes dombrage ds la topologie de lenvironnement. En accord avec lhypothse
3.1.1, d
l
(k) peut tre vue comme la composante qui contribue aux vanouissements lents.
Quant
l
(k), il reprsente les uctuations du canal imputables aux diffuseurs respon-
sables de lvanouissement rapide. Onnotera que d
l
(k) est considre ici comme pseudo-
dterministe seulement parce que la fentre dobservation est limite par rapport la vi-
tesse de uctuation des phnomnes physiques sous-jacents. Une fentre dobservation
plus longue pourrait mener des conclusions diffrentes.
0 20 40 60 80 100 120 140
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
Temps (s)
|
h
l
(
k
)
|
Trajet 1
Trajet 2
Trajet 3
Figure 3.1 Exemples dvolution temporelle de lenveloppe des trajets dun canal ASM.
Pour valider et dnir plus prcisment notre modle de canal stationnaire en ten-
dance, nous cherchons maintenant isoler la tendance de la partie purement alatoire.
Si nous russissons isoler ces deux composantes et obtenir des proprits invariantes
sur d
l
(k) et
l
(k) pour tous les canaux analyss, alors nous pourrons admettre que lhy-
pothse 3.1.1 et 3.1.2 sont des hypothses senses. Pour trouver un oprateur ou un es-
pace dans lequel ces composantes sont sparables, nous nous sommes focalis sur les
proprits physiques du canal. Daprs lhypothse 3.1.2, d
l
(k) est contraint par les ph-
nomnes qui induisent des variations sur lamplitude du canal sur des dures de lordre
de quelques secondes (pour londulation des vagues par exemple) jusqu plusieurs mi-
nutes (drive de lmetteur et du rcepteur) alors que les diffuseurs sont responsables de
t
e
l
-
0
0
6
3
8
8
3
6
,
v
e
r
s
i
o
n
1
-
7
N
o
v
2
0
1
1
48 CHAPITRE 3. REJEU STOCHASTIQUE DE CANAL
lvanouissement sur des priodes de lordre de dizaines ou centaines de milli-secondes.
Par consquent, d
l
(k) et
l
(k) peuvent tre discrimins grce leur amplitude respective.
La difcult consiste alors ltrer les trajets dun canal valeurs complexes partir dun
critre bas sur les priodes de variations de son amplitude tout en conservant linfor-
mation de phase. Lutilisation dun ltre linaire classique ne semble pas adapte notre
problme. Les observations montrent en effet que la phase des trajets ne varie pas n-
cessairement au mme rythme que leur amplitude et rien ne garantit que les spectres
frquentiels de d
l
(k) et
l
(k) soient disjoints. Une autre approche, motive par lobser-
vation de trajets avec une forte tendance (voir gure 3.2 par exemple), est de modliser
chaque trajet comme la somme de modes moduls en amplitude (AM) et en frquence
(FM).
0 5 10 15 20
0
0.1
0.2
0.3
0.4
0.5
Temps (s)
M
o
d
u
l
e
0 5 10 15 20
0.5
0.25
0
0.25
0.5
Temps (s)
F
r
q
u
e
n
c
e
i
n
s
t
a
n
t
a
n
e
(
H
z
)
Figure 3.2 Exemple dvolution temporelle du module et de la frquence instantane
dun trajet avec une tendance puissante (Mer Med.).
La dcomposition de signaux non-stationnaires au sens large en composantes in-
trinsques modules AM-FM est possible grce la dcomposition modale empirique
(EMD) initialement propose par Huang et al. dans [Huang et al., 1998] et brivement
prsente dans lannexe B. LEMD est pertinente pour rsoudre notre problme princi-
palement parce que la dcomposition en modes AM-FM est approprie lanalyse de
signaux non-stationnaires mais aussi parce quelle ne requiert pas de base de fonctions
pr-determines. De plus, elle ne fait aucune hypothse sur la nature harmonique des os-
cillations et peut ainsi garantir une reprsentation compacte du signal original (i.e., avec
moins de modes quune transforme de Fourier ou en ondelettes). La mthode EMD ini-
tiale tant limite aux sries temporelles valeurs relles, nous utilisons ici son extension
aux signaux valeurs complexes prsente dans [Rilling et al., 2007].
Chaque trajet du canal peut se reprsenter dans lespace des modes empiriques
comme
h
l
(k) =
Q
l
1
q=0
m
l ,q
(k) +
l
(k) (3.7)
o m
l ,q
est le q-ime des Q
l
modes rsultant de lEMDdu trajet h
l
et
l
est le rsidude d-
composition. Comme les modes oscillants rapidement (resp. lentement) contribuent aux
vanouissements rapides (resp. lents), nous discriminons alors la tendance de la compo-
t
e
l
-
0
0
6
3
8
8
3
6
,
v
e
r
s
i
o
n
1
-
7
N
o
v
2
0
1
1
3.1. INFRENCE EMPIRIQUE 49
sante alatoire comme
h
l
(k) =
S
l
1
q=0
m
l ,q
(k)
. .
l
(k)
+
Q
l
1
q=S
l
m
l ,q
(k) +
l
(k)
. .
d
l
(k)
(3.8)
o S
l
est lordre de dcomposition permettant de sparer les deux composantes. Les p-
riodes dvanouissement tant mesures sur lenveloppe du trajet, S
l
est bas sur un
critre frquentiel calcul sur le module des modes. Plus prcisment, si nous consid-
rons que le phnomne pseudo-dterministe le plus rapide affectant lamplitude dun
trajet est londulation des vagues, S
l
est choisi comme lordre maximum tel que la p-
riode moyenne de |
S
l
1
q=0
m
l ,q
(k)| soit infrieure la priode moyenne des vagues (ha-
bituellement de lordre de quelques secondes). Il existe plusieurs manires de calculer
cette priode moyenne [Massel, 1996]. Puisque nous travaillons sur le module de signaux
valeurs complexes, nous suggrons dutiliser la priode moyenne crte qui est dnie
comme le temps moyen sparant les extrema de |
S
l
1
q=0
m
l ,q
(k)|. On notera que lEMD
tant une opration non-linaire, la mthode de ltrage (3.8) est elle aussi non-linaire.
Un exemple de ltrage EMD appliqu des donnes relles est montr la gure
3.3. Le rsultat de dcomposition apparat conforme lhypothse 3.1.2 car la compo-
sante
l
(k) estime semble tre la ralisation dun processus stationnaire au sens large
moyenne nulle. Pour isoler les deux composantes, la priode moyenne de |
S
l
1
q=0
m
l ,q
(k)|
a t minore 5 s ce qui correspond la priode moyenne minimale des ondulations de
vagues observe sur les donnes relles.
0
50
100
150
0.2
0
0.2
0.1
0.05
0
0.05
0.1
0.15
Temps (s)
Partie relle
P
a
r
t
i
e
i
m
a
g
i
n
a
i
r
e
0
50
100
150
0.2
0
0.2
0.1
0.05
0
0.05
0.1
0.15
Temps (s)
Partie relle
P
a
r
t
i
e
i
m
a
g
i
n
a
i
r
e
Tendance
Composante alatoire
(a) (b)
Figure 3.3 Illustration du ltrage EMD appliqu un trajet dun canal rel. (a) Trajet
original, (b) sparation de la tendance et de la composante alatoire.
3.1.2 Densit de probabilit du canal
Grce au ltrage EMD, il est maintenant possible dtudier les proprits statistiques
de chaque processus alatoire
l
(k) et plus particulirement dtablir un modle de den-
sit de probabilit de celui-ci, sous lhypothse quil est ergodique. Comme discut pr-
cdemment, linfrence empirique requiert souvent une intuition pralable pour imagi-
ner un modle, cette intuition tant ensuite compare aux donnes observes laide de
t
e
l
-
0
0
6
3
8
8
3
6
,
v
e
r
s
i
o
n
1
-
7
N
o
v
2
0
1
1
50 CHAPITRE 3. REJEU STOCHASTIQUE DE CANAL
tests statistiques pour statuer sur la validit du modle. Pour rconcilier partiellement les
cadres dinfrence baysien et empirique, nous proposons dutiliser le principe dentro-
pie maximale pour orienter ou stimuler lintuition ncessaire la dnition de notre mo-
dle empirique. A partir des chantillons
l
(k) et sous lhypothse dergodicit, il est pos-
sible destimer simplement nimporte quel moment lordre p, en supposant quil existe,
comme 1/N
N1
k=0
|
l
(k)|
p
, o N est le nombre dchantillons disponibles. Pour avoir
une ide sur lexpression dun modle paramtrique qui correspondrait aux donnes,
nous suggrons dappliquer le principe dentropie maximale sous contrainte de moments
connus diffrents ordres et de comparer, laide le divergence de Kullback-Leibler (KL)
[Cover and Thomas, 1991], les distributions rsultantes avec les densits de probabilit
empiriques. La divergence KL fournit une mesure de dissimilarit entre deux distribu-
tions, des distributions identiques ayant une divergence de 0. Le tableau 3.1 montre un
exemple de divergence KL mesure sur un trajet sond dans locan Atlantique. Sur cet
exemple reprsentatif, on peut observer que la mesure de KL converge vers une valeur
faible stable ds que lon intgre dans le modle entropie maximale les contraintes
lordre deux. Comme nous avons pu le voir dans le chapitre prcdent, la distribu-
tion rsultante de lapplication de contraintes au second ordre sur le modle entropie
maximale est une distribution normale o les parties relles et imaginaires sont ind-
pendantes. A titre dillustration, lhistogramme conjoint de la partie relle et de la partie
imaginaire dune composante alatoire dun trajet atlantique est montre la gure
3.4.
Tableau 3.1 Exemple de mesures de divergence de KL en fonction des ordres de
contrainte
Ordre des moments p 0 1 2 3 4 5
Divergence KL 0.64 0.62 8.810
3
7.510
3
7.510
3
6.310
3
2
1
0
1
2
2
0
2
0
0.05
0.1
0.15
0.2
0.25
0.3
Partie relle Partie imaginaire
Figure 3.4 Exemple dhistogramme conjoint de la partie relle et de la partie imaginaire
dune composante alatoire dun trajet atlantique .
t
e
l
-
0
0
6
3
8
8
3
6
,
v
e
r
s
i
o
n
1
-
7
N
o
v
2
0
1
1
3.1. INFRENCE EMPIRIQUE 51
Sans relle surprise le modle gaussien apparat de nouveau. Pour conforter ce rsul-
tat, nous avons appliqu un test de Kolmogorov-Smirnov [Stephens, 1974] sur les enve-
loppes des composantes
l
(k). Le test de Kolmogorov-Smirnov est un test dhypothses
bas sur les fonctions de rpartitions empiriques. Il sert dterminer si un chantillon
donn suit une loi prcise ou non. Sous lhypothse de gaussianit et dindpendance des
parties relles et imaginaires, |
l
(k)| doit en thorie suivre une distribution de Rayleigh.
96% des trajets confronts au test Kolmogorov-Smirnov ont pass le test avec un niveau
de signication (p-valeur) suprieur 5%. On rappelle quun rsultat est dit statistique-
ment signicatif lorsquil est improbable quil puisse tre obtenu par un simple hasard,
5%tant un seuil conventionel [Stigler, 2008]. Le fait quun modle de densit de probabi-
lit commun tous les trajets tests ait t trouv tend montrer que les hypothses 3.1.1
et 3.1.2 sont valides. Par consquent, nous considrons que les canaux analyss peuvent
tre modliss par des canaux de Rice avec une composante moyenne uctuant lente-
ment au cours du temps. En complment et comme illustr la gure 3.5, les mesures ef-
fectues sur les canaux rels indiquent que le rapport de puissance (appel aussi facteur
de Rice) entre les tendances d
l
(k) et les composantes alatoires
l
(k) dpend du retard
darrive des trajets et tend vers zro pour les trajets les plus retards.
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5
0
100
200
300
400
500
600
700
(ms)
F
a
c
t
e
u
r
d
e
R
i
c
e
1 1.5 2 2.5 3 3.5 4
0
10
20
30
(ms)
F
a
c
t
e
u
r
d
e
R
i
c
e
0 5 10 15 20 25 30 35 40 45 50
0
5
10
15
20
25
30
(ms)
F
a
c
t
e
u
r
d
e
R
i
c
e
(a) (b)
Figure 3.5 Mesures du facteur de Rice en fonction du retard darrive de chaque trajet.
(a) Exemple de canal trs stable sond dans locanAtlantique, (b) exemple de canal sond
en mer Mditerrane.
Si
l
(k) est un processus gaussien, il est alors entirement caractris par ses statis-
tiques du premier et second ordre. Les mesures et les tests statistiques rvlent quil sagit
dun processus moyenne nulle, mais il semble difcile de trouver un modle param-
trique gnral pour ses statistiques de second ordre. Les observations semblent indiquer
dune part que les spectres Doppler sont diffrents dun canal lautre et dautre part,
si lon veut se rapprocher au plus prs de la ralit physique, il faut prendre en compte
la corrlation potentielle entre trajets ce qui semble difcile intgrer dans un modle
paramtrique simple. Toutefois, comme montr dans la section suivante, dans le cadre
du rejeu stochastique, il est possible de tirer de nouvelles ralisations des processus
l
(k)
tout en conservant les proprits de leurs statistiques de second ordre, sans le recours
la dnition dun modle paramtrique complet.
t
e
l
-
0
0
6
3
8
8
3
6
,
v
e
r
s
i
o
n
1
-
7
N
o
v
2
0
1
1
52 CHAPITRE 3. REJEU STOCHASTIQUE DE CANAL
3.2 Corrlations entre trajets et rejeu
Le rejeu stochastique repose sur le postulat selon lequel un canal de communication
sond un endroit donn sur une fentre temporelle donne est lobservation dun pro-
cessus alatoire sous-jacent. Daprs les rsultats obtenus dans la section prcdente,
le caractre alatoire du canal est reprsent par les
l
(k). Ds lors, le vecteur observ
[
0
(k), ,
L1
(k)] est considr comme la ralisation dun processus alatoire gaussien
multi-vari (k) = [
0
(k), ,
L1
(k)]. La mthode de Rice dtaille dans [Rice, 1944]
suggre de construire un processus alatoire gaussien (k)
=[
0
(k), ,
L
(k)] partir de
notre observation comme
l
(k) =
1
N
N1
n=0
Z
l
(n)e
2j nk/N
e
j
l
(n)
, 0 l L 1 (3.9)
o Z
l
(n) =
1
N1
k=0
l
(k)e
2j nk/N
,
l
(n) est une variable alatoire i.i.d et N est la taille
de la fentre dobservation. Dans nos exprimentations, N est sufsamment grand (entre
240 et 15000) pour invoquer le thorme de la limite centrale et garantir une certaine
gaussianit des
l
(k). Comme
l
(k) est la ralisation dun processus moyenne nulle,
l
(n) est choisi est choisi alatoirement et de faon uniforme sur lintervalle ]0, 2].
Les statistiques du second ordre de (k) sont dnis par la matrice de corrlation
(u) =
_
_
_
_
_
0,0
(u)
0,1
(u)
0,L1
(u)
1,0
(u)
1,1
(u)
1,L1
(u)
.
.
.
.
.
.
.
.
.
.
.
.
L1,0
(u)
L1,1
(u)
L1,L1
(u)
_
_
_
_
_
(3.10)
o
l ,p
(u) =E{
l
(k)
p
(k u)}. Si le processus est suppos ergodique, nous avons alors
l ,p
(u) = lim
N+
1
2N +1
N
k=N
l
(k)
p
(k u). (3.11)
Lhypothse usuelle dabsence de corrlations entre trajets considre que
l ,p
(u) =0, l =
p mais dans notre cas nous relchons cette hypothse pour tre aussi proche que possible
de ralit physique du canal. Les rexions sur les mmes corps physiques ou les tale-
ments de retard et Doppler causs par la transmission de donnes limites dans le temps
et en frquence peuvent en effet induire de la corrlation entre les trajets multiples. Dans
la plupart des cas, la simulation de processus alatoires corrls est assez complexe et
coteuse en calcul [Deodatis, 1996; Chen and Letchford, 2005]. Dans [van Walree et al.,
2008], les auteurs contournent cette difcult en supposant que la fonction de diffusion
du canal est sparable en retard et Doppler. Cette sparabilit rduit ainsi les corrlations
un produit de facteurs de corrlation temporelle et spatiale. Bien que cette hypothse
puisse tre valable dans certains milieux spciques tels que le chenal de la mer Baltique
prsent dans [van Walree et al., 2008], elle ne convient pas aux mesures que nous avons
recueillies dans locan Atlantique et la mer Mditerrane.
An de gnrer un processus (k) avec des statistiques similaires (k), nous pro-
posons de crer de la dpendance entre les phases alatoires
l
(n). Les lments de la
t
e
l
-
0
0
6
3
8
8
3
6
,
v
e
r
s
i
o
n
1
-
7
N
o
v
2
0
1
1
3.3. ILLUSTRATIONS 53
matrice de corrlation de (k) sexpriment comme
E
_
l
(k)
p
(k u)
_
=
1
N
_N1
n=0
Z
l
(n)Z
p
(n)e
2j u
n
N
.E
_
e
j (
l
(n)
p
(n))
_
+
N1
n=0
N1
m=0
m=n
Z
l
(n)Z
p
(m)e
2j
k(nm)+mu
N
.E
_
e
j (
l
(n)
p
(m))
__
.
(3.12)
En choisissant
l
(n) =
p
(n) et les {
l
(n)}
n
i.i.d, il vient que
E{e
j (
l
(n)
p
(n))
} = 1 (3.13)
E{e
j (
l
(n)
p
(m))
} = 0, m=n. (3.14)
(3.12) se simplie alors et devient
E
_
l
(k)
p
(k u)
_
=
1
N
N1
n=0
Z
l
(n)Z
p
(n)e
2j u
n
N
. (3.15)
En appliquant le thorme de Plancherel-Parseval, cette relation peut scrire comme
E
_
l
(k)
p
(k u)
_
=
1
N
N1
k=0
l
(k)
p
([k u]
N
) (3.16)
o [.]
N
dnote lopration modulo N. E
_
l
(k)
p
(k u)
_
savre tre une trs bonne ap-
proximation de
l ,p
(u) dans notre contexte. En effet, les mesures effectues sur les
l
(k)
indiquent que leurs temps de cohrence sont infrieurs 600 ms (resp. 2 s) pour des ni-
veaux de corrlation de 50% (resp. 10%). Ces dures sont trs courtes en comparaison
avec la dure des observations disponibles qui sont comprises entre 30 et 160 secondes.
Par consquent, tant donn que [Max and Lacoume, 2004, pp. 195]
1
1
N
N1
n=0
E
_
l
(k)
p
([k u]
N
)
_
=
_
Nu
N
l ,p
(u) pour 0 u
N
2
,
u
N
l ,p
(N u) pour
N
2
u N,
(3.17)
et que la corrlation est seulement signicative pour des petites valeurs de u, nous pou-
vons conclure que (3.16) est lexpression dun estimateur faiblement biais de
l ,p
(u). En
consquence, le vritable processus alatoire (k) sous-jacent aux observations peut tre
approch par (k).
La procdure complte de rejeu stochastique peut tre rsum par lalgorithme 1.
On notera que le caractre non stationnaire du canal que lon rejoue limite la dure de
rejeu la dure de la rponse impulsionnelle initialement observe.
3.3 Illustrations
Le rejeu de canal savre tre un moyen de validation complmentaire aux essais ter-
rains. Alors que les exprimentations en mer garantissent des conditions de test ralistes,
1. Pour obtenir ce rsulat, la corrlation est suppose ngligeable pour u >N/2.
t
e
l
-
0
0
6
3
8
8
3
6
,
v
e
r
s
i
o
n
1
-
7
N
o
v
2
0
1
1
54 CHAPITRE 3. REJEU STOCHASTIQUE DE CANAL
Algorithm1 Rejeu stochastique de canal
Require: Une estimation de la rponse impulsionnelle dun canal rel sur une fentre de
N chantillons et constitue de L trajets.
1. Tirer N ralisations dune variable alatoire (n) uniformment distribue sur ]0, 2]
for 0 l L 1 do
2. A laide de lEMD, dcomposer chaque trajet h
l
(k) comme h
l
(k) =d
l
(k) +
l
(k)
3. Calculer Z
l
(n) =
1
N1
k=0
l
(k)e
2j nk/N
4. Calculer
l
(k) =
1
N1
n=0
Z
l
(n)e
2j nk/N
e
j (n)
5. Additionner
l
(k) d
l
(k) pour obtenir une nouvelle ralisation du trajet l
end for
elles offrent un champ de validation restreint puisquelles correspondent un instan-
tan dun environnement oprationnel donn. Mme si, contrairement aux modles
de propagation paramtriques comme celui du chapitre prcdent, le rejeu est lui aussi
contraint par cet environnement oprationnel (immersion TX/RX, frquence, distance
TX-RX xes etc.), il permet, dans une certaine mesure, dvaluer la contribution de cer-
tains phnomnes physiques de faon indpendante. Par exemple, partir de la rponse
impulsionnelle originale du canal rel, il est possible de tester des systmes de communi-
cationavec diffrentes congurations (constellation, dbit, mono vs multi-porteuses etc.)
dans des environnements varis (types ou puissances de bruit diffrents, facteur de Rice
variable etc.). Comme nous allons le voir dans le chapitre suivant, ce rejeu peut aussi per-
mettre dvaluer numriquement la capacit de canaux rels ASM. De plus, lavantage du
caractre stochastique du rejeu de canal est que, grce des simulations de Monte-Carlo,
toutes les mtriques utilises pour la conception ou validation de systmes peuvent tre
calcules avec un bon niveau de signication statistique.
A titre dillustration, la gure 3.6 montre le LCR (cf. (2.20)) des canaux (f) et (b) des -
gures 1.6 et 1.7 qui ont la particularit dtre non-stationnaires. La gure 3.6 met en avant
deux phnomnes. Premirement, par simulation de Monte-Carlo, lutilisation du rejeu
stochastique permet de rduire la variance destimation de la statistique dvanouisse-
ment LCR par rapport aux mesures effectues sur la rponse impulsionnelle originale.
Deuximement, en comparant les rsultats obtenus avec le rejeu stochastique et le mo-
dle entropie maximale, il est possible dvaluer limpact du caractre non-stationnaire
du canal et de la corrlationpotentielle entre trajets sur les mesures. Le modle entropie
maximale, tel que dni dans le chapitre prcdent, faisant lhypothse de stationnarit
et nintgrant pas linformation de corrlation est par consquent moins proche des don-
nes relles. On notera que si ce dernier tait contraint par une quantit dinformation
quivalente celle implicitement utilise par le modle de rejeu, les deux mthodes de-
vraient en thorie converger vers les mmes rsultats.
Un autre exemple original dutilisation du rejeu stochastique est prsent la gure
3.7. Il correspond un cas o le rejeu est utilis pour rgler les algorithmes de rception.
Par exemple, il peut tre intressant de savoir dans quelle mesure un rcepteur est sen-
sible aux uctuations rapides du canal. Une manire dvaluer cette sensibilit est des-
timer le taux derreur binaire en fonction de rapports de puissance Eb/N0 pour divers
t
e
l
-
0
0
6
3
8
8
3
6
,
v
e
r
s
i
o
n
1
-
7
N
o
v
2
0
1
1
3.3. ILLUSTRATIONS 55
10 5 0 5
10
5
10
4
10
3
10
2
10
1
10
0
10
1
(dB)
L
C
R
(
s
1
)
Canal rel
Rejeu stochastique
Modle maxent (2.7)+(2.18)
(a)
20 16 12 8 4 0 4 8
10
4
10
3
10
2
10
1
10
0
10
1
(dB)
L
C
R
(
s
1
)
Canal rel
Rejeu stochastique
Modle maxent (2.7)+(2.18)
(b)
Figure 3.6 Comparaison des LCR mesurs entre le rejeu stochastique et lapproche
entropie maximale sur des canaux non-stationnaires. (a) Canal atlantique, (b) canal m-
diterranen.
rapports de puissance K
tot
entre les tendances et les composantes alatoires du canal o
K
tot
=
L1
l =0
N1
k=0
|d
l
(k)|
2
L1
l =0
N1
k=0
|
l
(k)|
2
. (3.18)
Puisque nous sommes en mesure disoler les deux composantes, il est possible de mo-
dier articiellement la puissance de lune ou lautre et dvaluer limpact de ce change-
ment sur le TEB. Ceci est illustr la gure 3.7 sur un systme QPSK comme dcrit la
section 2.4.1 et pour le canal atlantique (f) de la gure 1.7 o K
tot
est articiellement r-
duit 0 dB par pas de 3 dB, le rapport de puissance K
tot
estim sur le canal original tant
de 18 dB.
Des exemples complmentaires dutilisation du rejeu stochastique sont prsents
dans [Socheleau et al., 2011a,b].
t
e
l
-
0
0
6
3
8
8
3
6
,
v
e
r
s
i
o
n
1
-
7
N
o
v
2
0
1
1
56 CHAPITRE 3. REJEU STOCHASTIQUE DE CANAL
0 2 4 6 8 10 12 14 16 18 20
10
4
10
3
10
2
10
1
10
0
Eb/N0
T
E
B
K
tot
=0 dB
K
tot
=3 dB
K
tot
=18 dB
Figure 3.7 Inuence sur le taux derreur binaire dun systme QPSKdu rapport de puis-
sance les tendances et les composantes alatoires dun canal atlantique.
t
e
l
-
0
0
6
3
8
8
3
6
,
v
e
r
s
i
o
n
1
-
7
N
o
v
2
0
1
1
Conclusion
Aprs avoir rappel quelques gnralits sur le milieu ASM, nous nous sommes int-
ress, dans cette partie, la modlisation du canal de communication acoustique sous-
marin. Nous avons propos deux modles complmentaires qui exploitent diffrents de-
grs de connaissance a priori sur le milieu modliser.
Le premier modle, dtaill dans le chapitre 2, est un modle paramtrique qui a pour
vocation dtre utilis dans les premires phases de conception et de validation des mo-
dems ASM. Ce modle exploite le principe dentropie maximale qui repose sur le forma-
lisme de la thorie de linformation. Undes atouts majeurs de lapproche entropie maxi-
male, elle quest permet dobtenir un modle quel que soit notre degr de connaissance
sur le milieu que lon cherche modliser. A laide de ce principe dinfrence inductive,
nous avons notamment montr qu partir du connaissance limite du milieu de propa-
gation, il tait possible dobtenir un modle proche de la ralit physique de ce milieu.
En effet, les comparaisons entre des statistiques dvanouissement ou de taux derreur
binaire issus du modle et de canaux rels indiquent que la connaissance du prol de
puissance du canal, du facteur de Rice et de ltalement Doppler peut savrer sufsante
pour imiter avec prcision le milieu sous-marin rel.
Avec pour objectif de se rapprocher au maximum des caractristiques physiques du
canal, nous avons ensuite propos au chapitre 3 le modle de rejeu stochastique. Ce mo-
dle, non paramtrique et pilot par des mesures relles, a pour vocation dtre utilis
dans des phases de conceptions ou validation plus avances que celles o le modle
entropie maximale intervient. A partir dune seule mesure de rponse impulsionnelle ef-
fectue en mer, le rejeu stochastique permet dvaluer, de faon indpendante, limpact
de diffrents phnomnes physiques sur le lien de communicationavec un bonniveaude
signication statistique. Lanalyse des canaux de transmission rels a montr que ceux-ci
peuvent tre modliss par des processus alatoires stationnaires en tendance, ce qui est
plus gnrale que lhypothse habituelle de stationnarit au sens large. De plus, condi-
tion que la dure du signal rel rejou soit suprieure au temps de cohrence du canal,
nous avons montr que la corrlation potentielle entre trajets peut facilement tre simu-
le sans avoir recours un modle paramtrique.
t
e
l
-
0
0
6
3
8
8
3
6
,
v
e
r
s
i
o
n
1
-
7
N
o
v
2
0
1
1
t
e
l
-
0
0
6
3
8
8
3
6
,
v
e
r
s
i
o
n
1
-
7
N
o
v
2
0
1
1
Deuxime partie
Capacit du canal et optimisation du
schma de signalisation
t
e
l
-
0
0
6
3
8
8
3
6
,
v
e
r
s
i
o
n
1
-
7
N
o
v
2
0
1
1
t
e
l
-
0
0
6
3
8
8
3
6
,
v
e
r
s
i
o
n
1
-
7
N
o
v
2
0
1
1
Introduction
Les rcentes exprimentations de nouveaux schmas de signalisation et de tech-
niques performantes de traitement du signal ont montr quil tait possible daccrotre
les dbits de communication des systmes acoustiques ou damliorer leur robustesse
par rapport aux modems actuellement commercialiss. Comme indiqu dans lintroduc-
tion gnrale, parmi ces techniques, souvent empruntes au domaine des radiocommu-
nications, on trouve notamment les modulations multi-porteuses [Frassati et al., 2005;
Gomes and Stojanovic, 2009; Li et al., 2008; Leus and van Walree, 2009], le recours aux
systmes multi-capteurs [Li et al., 2009; Roy et al., 2007], les techniques de codage canal
type turbo-codes [Trubuil et al., 2010] ou LDPC [Huang et al., 2008], lidentication de
canaux parcimonieux [Berger et al., 2010; Zamanizadeh et al., 2010] ou encore les tech-
niques itratives de rception [Laot et al., 2010; Otnes and Eggen, 2008].
Dans ce contexte, une valuation des performances limites quil est possible dat-
teindre sous leau avec une onde acoustique, notamment au moyen du calcul de la ca-
pacit de Shannon, apparat essentielle pour dterminer si ces nouvelles techniques
peuvent effectivement aboutir une amlioration signicative des dbits de transmis-
sion comme celle observe au cours des dix dernires annes dans de le domaine des
radiocommunications par exemple. De plus, an de trouver un bon compromis d-
bit/robustesse et de chercher se rapprocher des bornes thoriques de capacit, il est
primordial didentier des directives de conception de systmes de communications qui
permettent doptimiser les schmas de signalisation utiliss.
Contrairement la capacit des canaux radios, la capacit des canaux ASM petit-fond
a t peu tudie. Dans [Hayward and Yang, 2004], les auteurs calculent la capacit du
canal ASM en appliquant un modle de propagation base de rayons gaussiens pour
connatre lamplitude et la phase de chacun des trajets. Ils considrent un canal slectif
en frquence mais invariant dans le temps et supposent une bande de frquence dis-
ponible quasiment illimite. En supposant une puissance de transmission de 193 dB re
Pa @ 1 m, ils aboutissent des rsultats de capacit trs optimistes o le produit dbit-
distance est de lordre de 1 Mbits/skm. Ceci est trs suprieur aux systmes actuels qui
sont gnralement majors par un produit dbit-distance de 50 kbits/skm. Plus rcem-
ment, Lucani et al. considrent dans [Lucani et al., 2008] un modle de propagation plus
simple
2
et dterminent des relations approches entre la distance, la puissance de trans-
mission et la capacit. Mme si ces travaux sont trs intressants, ils ne sont pas com-
2. Ils considrent un canal mono-trajet dont le SNR la rception varie avec la frquence et la distance
en fonction dun modle physique de propagation simpli.
t
e
l
-
0
0
6
3
8
8
3
6
,
v
e
r
s
i
o
n
1
-
7
N
o
v
2
0
1
1
62 INTRODUCTION
pltement ralistes puisquils ngligent la fois certaines caractristiques critiques du
canal ASM, comme son caractre alatoire et variant dans le temps, ainsi que des limita-
tions imposes par le matriel de transmission, comme la puissance crte et la bande de
transmissionlimites. Dans le chapitre 4, la capacit du canal de transmissionacoustique
sous-marinest aborde en considrant unmaximumde contraintes ralistes. Le canal est
suppos doublement dispersif, les puissances crtes et moyennes limites et la ralisation
courante du canal inconnue de lmetteur et du rcepteur (contexte non-cohrent).
Une fois les bornes de capacit connues, lobjectif ultime est de trouver le schma
de signalisation qui permet datteindre ces bornes. Cette recherche savre trs dlicate
dans la pratique. De part son caractre doublement dispersif et sa limitation en bande
passante, le milieu de propagation acoustique sous-marin impose des contraintes fortes
sur les notions trs intriques de robustesse et defcacit spectrale qui dnissent les
performances des systmes de communication. Alors que la notion defcacit spectrale
est clairement dnie et se mesure en bits/s/Hz, la notion de robustesse est plus subjec-
tive. Un systme peut tre considr comme robuste lorsquil nest pas trop affect par les
carts entre lenvironnement rel de propagation et celui suppos a priori. Cette robus-
tesse est en gnral inversement proportionnelle au nombre de paramtres xs a priori.
Ce dilemme robustesse-efcacit spectrale se traduit dans la pratique par le choix de
modulations diffrentes en fonction de limportance que lon accorde lune ou lautre
caractristique et en fonction des proprits du canal. Historiquement, les modulations
mono-porteuses couples des rcepteurs reposant sur des galiseurs de canal ont t
largement tudies et utilises dans la pratique pour les communications sous-marines
haut-dbit [Kilfoyle and Baggeroer, 2000]. Depuis peu, les systmes multi-porteuses de
type OFDM (Orthogonal Frequency Division Multiplexing) gnrent beaucoup dintrt
en raison de la simplicit de leur rcepteur et de la exibilit quils offrent [Frassati et al.,
2005; Li et al., 2008; Leus and van Walree, 2009]. Dans un contexte ASM, la caractristique
la plus attrayante de lOFDM est peut-tre la simplicit du rcepteur utilisant lgalisa-
tion dans le domaine frquentiel, avec un coefcient unique par sous-porteuse, et un
nombre restreint de paramtres xs a priori. Cette simplicit en fait un systme de com-
municationgnralement robuste. Ceci est comparer avec les galiseurs utiliss pour les
systmes mono-porteuses qui requirent le rglage de paramtres tels que le nombre de
coefcient des ltres dgalisationou le pas dadaptation, rglage qui peut savrer dlicat
dans la pratique lorsque le canal est trs dispersif en temps. Cependant, la robustesse de
lOFDM, par rapport aux modulations mono-porteuses, se paie en efcacit spectrale du
fait de lutilisationdintervalles de garde dont la dure est minore par ltalement tempo-
rel maximal du canal, talement qui peut atteindre plusieurs dizaines de milli-secondes
(cf. gure 1.6). En fonction de la vitesse de uctuation du canal, ces intervalles de garde
peuvent en effet induire jusqu 50%de perte defcacit spectrale.
Labsence de solution universelle qui permettrait dobtenir un systme de commu-
nication robuste et efcace quel que soit lenvironnement sous-marin est imputer au
caractre doublement dispersif du canal et ses diffrences notoires dune zone gogra-
phique ou dune saison lautre [van Walree, 2011]. Cependant, en uniant les concepts
de modulations mono-porteuses et OFDM dans un schma de signalisation plus gnral
et en apportant une certaine connaissance du canal lmetteur, il est envisageable de
trouver un compromis robustesse-efcacit quel que soit lenvironnement de propaga-
t
e
l
-
0
0
6
3
8
8
3
6
,
v
e
r
s
i
o
n
1
-
7
N
o
v
2
0
1
1
INTRODUCTION 63
tion.
Il est communment admis que la connaissance du canal H la rception peut tre
obtenue (au prix dune perte de capacit) laide de mthodes destimation de canal, ce
qui permet une dtection cohrente. La connaissance du canal lmission peut, quant
elle, permettre dadapter la forme donde transmise aux caractristiques de ce canal et
de rduire ainsi la complexit des techniques dgalisation et de dtection la rception
et/ou damliorer lefcacit spectrale. Cette connaissance peut tre utilise pour effec-
tuer une opration de diagonalisation du canal, en transmettant linformation sur les
fonctions singulires de H, et/ou pour allouer les ressources (comme la puissance par
exemple) de faon optimale. Lenvoi dinformation sur des classes de canaux qui ont une
structure singulire commune peut se faire en garantissant une absence dinterfrence
la rception et peut permettre ainsi la rcupration des donns transmises par des algo-
rithmes simples. Ainsi, lOFDM (avec un choix appropri de lintervalle de garde) diago-
nalise exactement la classe des canaux invariants dans le temps et les modulations mono-
porteuses la classe des canaux non slectifs en frquence.
Pour les canaux doublements slectifs et dans un contexte ASM, la diagonalisationest
plus dlicate car Hest alatoire et lmetteur ne peut pas connatre le ralisationcourante
du canal dans la plupart des cas pratiques. La faible vitesse de propagation des ondes
acoustiques couple avec la uctuation rapide du canal implique, en effet, que linfor-
mation sur ltat du canal (CSI) nest plus dactualit lorsquelle arrive lmetteur par
le biais dun lien de retour. Cependant, lmetteur peut obtenir une information sur les
statistiques du canal qui, elles, uctuent beaucoup plus lentement (cf. chapitre 3). Du
fait du caractre alatoire du canal, il est aussi fortement probable que sa structure sin-
gulire soit elle aussi alatoire, de sorte que la conception du rcepteur et de lmetteur
doit se faire conjointement pour un ensemble de canaux qui prsentent des structures
singulires diffrentes. La diagonalisationdu canal ne peut alors se faire que de faon ap-
proche ou moyenne de sorte que linterfrence est inluctable. Le tout consiste alors
optimiser cette diagonalisation moyenne suivant un critre qui va dpendre du compro-
mis robustesse-efcacit spectrale le mieux adapt lapplication considre.
Le choix de la base de fonctions qui peut permettre de diagonaliser le canal de faon
approche est fortement orient par les contraintes contradictoires imposes par la dis-
persion temporelle et frquentielle. Le caractre doublement dispersif des canaux ASM
suggre dutiliser un schma de signalisationdont le support temps-frquence est adapt
aux caractristiques de ceux-ci. Cest le cas par exemple des bases de Gabor ou Weyl-
Heisenberg [Kozek, 1997] qui sont gnres partir dune fonction prototype dcale en
temps dune dure T et dune frquence F. Ces bases offrent une souplesse de conception
car elles permettent la fois doptimiser la fonction prototype ainsi que la grille temps-
frquence T F.
Aprs les calculs de capacit du chapitre 4, nous nous intressons au chapitre 5 la
notion de diagonalisationdu canal et aux caractristiques des bases de Weyl-Heisenberg.
Nous discutons des opportunits offertes par les bases de Weyl-Heisenberg pour optimi-
ser la robustesse des systmes de communications et tudions des techniques dalloca-
tion de puissance permettant de maximiser le taux dinformation.
t
e
l
-
0
0
6
3
8
8
3
6
,
v
e
r
s
i
o
n
1
-
7
N
o
v
2
0
1
1
t
e
l
-
0
0
6
3
8
8
3
6
,
v
e
r
s
i
o
n
1
-
7
N
o
v
2
0
1
1
CHAPITRE
4
Sur la capacit du canal
acoustique sous-marin
Sachons donc borner notre ambition : cest un funeste
dlire que de soupirer aprs ce quon ne peut atteindre.
Pindare
La capacit du canal de transmission acoustique sous-marin est aborde dans ce cha-
pitre en considrant un maximum de contraintes ralistes. Le canal est ici suppos dou-
blement dispersif, les puissances crtes et moyennes limites et la ralisationcourante du
canal inconnue de lmetteur et du rcepteur (contexte non-cohrent). La capacit exacte
du canal sous de telles hypothses reste encore inconnue. Par consquent, des bornes su-
prieures et infrieures de cette capacit sont proposes puis numriquement values et
discutes sur un canal ASM rel. Il est montr que la mise en uvre de systmes de com-
munications offrant une efcacit spectrale deux ou trois fois suprieure ltat de lart
apparat comme unobjectif raisonnablepour les canaux ASMpetit-fondtypiques avec un
SNR de 15 20 dB. De plus, pour une puissance moyenne de transmissionxe, il est ga-
lement montr que des systmes autorisant des rapports puissance crte sur puissance
moyenne importants sont fortement souhaitables.
4.1 Sur la capacit non-cohrente
Comme discut dans [Biglieri et al., 1998; Goldsmith, 2005], la capacit dun canal
alatoire variant dans le temps est conditionne par le degr de connaissance du canal
(CSI pour channel state information) lmetteur et au rcepteur. Le cas le plus favo-
rable pour la capacit correspond la situation o la connaissance de chaque ralisation
courante du canal est disponible lmetteur et au rcepteur. Dans ce cas, lmetteur a
la possibilit dadapter sa puissance de transmission instantane ainsi que le dbit (au
travers du codage et de la forme donde choisie) ltat courant du canal. Un autre cas fa-
vorable est lorsque la ralisation courante du canal est disponible la rception unique-
ment. Dans notre contexte ASMces hypothses sont optimistes. En effet, la connaissance
du canal la rception est gnralement acquise en allouant une partie des ressources
disponibles pour lestimation de canal. Par exemple, des symboles pilotes peuvent tre
incorpors dans le ux de donnes pour aider le rcepteur dans le processus destima-
tion de canal. Du point de vue de la thorie de linformation, lestimation de canal base
de pilotes nest quun cas particulier de codage. Ainsi, le dbit atteignable avec des sch-
mas base de squences dentranement ne peut excder la capacit en labsence de CSI
lmetteur et au rcepteur. Ceci est aussi valable pour les rcepteurs qui acquirent le
CSI par des mthodes aveugles destimation de canal. Celles-ci induisent une perte de
t
e
l
-
0
0
6
3
8
8
3
6
,
v
e
r
s
i
o
n
1
-
7
N
o
v
2
0
1
1
66 CHAPITRE 4. SUR LA CAPACIT DU CANAL ACOUSTIQUE SOUS-MARIN
SNR, imputable aux erreurs destimation, qui dgrade la capacit par rapport au cas idal
de connaissance parfaite du CSI.
Par la suite, nous dsignons par non-cohrente la conguration o la ralisation cou-
rante du canal nest disponible ni lmission ni la rception, mais o les statistiques du
canal sont connues [Sethuraman and Hajek, 2005; Durisi et al., 2010]. Ceci, par opposi-
tion la conguration cohrente o un gnie fournit au rcepteur un CSI parfait.
Malgr les efforts qui ont t fournis dans la littrature pour tudier les canaux dis-
persifs non-cohrents, aucune expression explicite de leur capacit nest connue ce
jour, mme pour les canaux simples. La plupart des rsultats disponibles calculent soit
la capacit dans des rgimes asymptotiques (bande passante innie, valeurs extrmes de
SNR) et/ou fournissent des bornes de celle-ci, et ce, pour diverses hypothses relatives
la puissance crte et la slectivit du canal. Les premires contributions sur la capa-
cit non-cohrente se concentrent sur les canaux vanouissement plat sans mmoire et
sans contrainte sur la puissance crte [Gallager, 1968; Richters, 1967; Faycal et al., 2001].
Plus rcemment, une puissance crte nie est considre dans [Gursoy et al., 2005] pour
des canaux de Rice mono-trajet variant dans le temps mais sans mmoire temporelle. Des
bornes de capacit non-cohrente sous contrainte de puissance crte nie ont aussi t
proposes dans [Sethuraman and Hajek, 2005] pour des canaux mono-trajets mais avec
mmoire temporelle et dans [Sethuraman et al., 2009; Durisi et al., 2010] pour des canaux
doublement dispersifs.
Les travaux prsents dans [Sethuraman et al., 2009] et [Durisi et al., 2010] sont troi-
tement lis ce chapitre car ils intgrent la fois de la mmoire temporelle et frquen-
tielle dans leur modle de canal et bornent les puissances moyenne et crte. Pour obte-
nir leurs bornes de capacit, les auteurs dans [Sethuraman et al., 2009] et [Durisi et al.,
2010] partitionnent le canal doublement dispersif en sous-bandes frquentielles de telle
sorte que le canal soit non slectif en frquence, mais variant dans le temps, au sein de
chaque sous-bande. La contrainte de puissance crte est alors applique soit sur chaque
slot temps-frquence du signal dentre ou soit sur la reprsentation temporelle globale
de ce signal
1
. Les limitations de puissance crte dans le domaine temps-frquence mo-
dlisent principalement les contraintes imposes par les organismes de rglementation
des ressources physiques et sappliquent par exemple aux systmes radio-frquence tels
que lUWB. La limitation de puissance crte dans le domaine temporel uniquement cor-
respond, quant elle, aux contraintes imposes par les appareils lectroniques tels que
les amplicateurs de puissance et, dans notre cas, imposes aussi par les sources acous-
tiques.
Contrairement au spectre radio-lectrique, lutilisation du spectre acoustique sous-
marin nest pas rglemente. Par consquent, seules les contraintes sur la reprsentation
temporelle du signal transmis sappliquent dans notre contexte. Malgr leur pertinence,
les bornes de capacit non-cohrente sous contrainte temporelle de puissance crte nie
prsentes dans [Sethuraman et al., 2009] et [Durisi et al., 2010] ne sont pas directement
applicables au canal ASM. En effet, elles considrent soit des signaux de bande innie
soit un rgime de faible SNR et sintressent uniquement aux canaux de Rayleigh. Le tra-
1. On notera quune puissance crte nie dans le domaine temps-frquence nimplique pas ncessaire-
ment une puissance crte nie dans le domaine temporel seul.
t
e
l
-
0
0
6
3
8
8
3
6
,
v
e
r
s
i
o
n
1
-
7
N
o
v
2
0
1
1
4.2. MODLE DE TRANSMISSION 67
vail que nous prsentons dans ce chapitre nimpose pas de restrictions particulires sur
la bande et le SNR et, en cohrence avec les rsultats obtenus dans les chapitres 2 et 3,
sapplique aux canaux de Rice qui incluent les canaux de Rayleigh comme cas particulier.
4.2 Modle de transmission
Soit x =[x(0), , x(N1)]
T
le vecteur dentre ducanal discret quivalent enbande de
base dont les composantes sont supposes indpendantes et identiquement distribues
2
(i.i.d.) et soumises aux contraintes suivantes, quel que soit k {0, N 1},
|x(k)|
2
2
x
, (4.1)
E
_
|x(k)|
2
_
=
2
x
2
x
, 1, (4.2)
o
2
x
dsigne la puissance crte et o reprsente le rapport minimal entre la puissance
crte et la puissance moyenne tolr par le systme. La contrainte (4.1) sur la puissance
crte, avec
2
x
< +, sapplique quel que soit le systme de communication ASM consi-
dr du fait des limites physiques des composants lectroniques ou acoustiques de la
chane de transmission. La contrainte (4.2) sur la puissance moyenne est principalement
signicative pour les metteurs aliments par des batteries pour lesquelles lnergie est
une ressource limite. Dans ce cas, est strictement suprieur 1. Il peut aussi y avoir
des scnarios o les transducteurs acoustiques imposent un fort pour limiter leur sur-
chauffe. Cest le cas lorsque de long messages doivent tre transmis sur de longues p-
riodes par exemple. Cependant, lorsque la puissance dmission est essentiellement li-
mite par le cot et le volume des amplicateurs, la contrainte est principalement sur la
puissance crte de telle sorte que est proche de 1.
La sortie du canal est donne par la relation
y = Hx +w (4.3)
o w dsigne le vecteur bruit et H est une matrice alatoire N N gaussienne et propre
dnie comme
H =
_
_
_
_
_
_
_
_
_
_
_
_
h
0
(0)
h
1
(1) h
0
(1)
.
.
. 0
h
L1
(L 1)
.
.
.
.
.
.
0 h
L1
(N 1) . . . h
0
(N 1)
_
_
_
_
_
_
_
_
_
_
_
_
. (4.4)
2. En raison de la mmoire temporelle du canal, une plus grande capacit de canal pourrait vraisem-
blablement tre obtenue si la distribution des symboles dentre ntait pas limite aux distributions i.i.d..
Nanmoins, la prise en compte de la corrlation entre symboles dentre dans le calcul de la capacit coh-
rente conduit un problme difcilement soluble. Par consquent, nous nous focalisons uniquement sur
des entres i.i.d.et utilisons le terme de capacit de faon lgrement abusive.
t
e
l
-
0
0
6
3
8
8
3
6
,
v
e
r
s
i
o
n
1
-
7
N
o
v
2
0
1
1
68 CHAPITRE 4. SUR LA CAPACIT DU CANAL ACOUSTIQUE SOUS-MARIN
Nous rappelons que h
l
(k) dsigne le gaincomplexe du l -ime trajet ducanal discret qui-
valent en bande de base linstant k, avec l {0, L 1} et k {0, N 1}. En fonction du
contexte, il peut tre aussi utile dcrire (4.3) comme
y =
L1
l =0
h
l
x
l
+w (4.5)
o h
l
est le vecteur N 1 correspondant au l -ime trajet, i.e., h
l
=[h
l
(0), h
l
(1), , h
l
(N
1)]
T
et o x
l
dsigne le vecteur x dont les N l premiers lments ont t dcals l fois
vers le bas et o les l premiers sont ensuite mis zros.
Les bornes de capacit que nous proposons dans ce chapitre reposent sur certaines
hypothses qui sont prsentes et justies ci-aprs.
Hypothse 4.2.1 Le canal de transmission est suppos ergodique.
Dune manire gnrale un processus alatoire est dit ergodique si les moyennes den-
semble et les moyennes temporelles sont identiques. On parle de canal ergodique lorsque
les gains complexes h
l
(k) peuvent tre modliss par des processus alatoires ergodiques.
Dans ce cas, le caractre alatoire du canal peut tre moyenn dans le temps de sorte
quun dbit de transmission constant peut tre support sur une longue dure (relative-
ment aux priodes de uctuation du canal). Du point de vue de la capacit, cette hypo-
thse dergodicit nest valide que si chaque mot de code transmis visite toutes les ra-
lisations du canal, autrement dit si le canal uctue rapidement sur la dure dun mot de
code. Dans notre contexte ASM, ceci est le plus souvent vri car le temps de cohrence
du canal nest que de lordre de quelques centaines de milli-secondes [Radosevic et al.,
2009; Socheleau et al., 2009] ce qui correspond la dure de quelques centaines ou mil-
liers de bits tant donn les bandes passantes utilises. De plus, les latences de traitement
induites par lutilisationde mots de code longs ne sont pas pnalisantes pour les systmes
de communications ASM car elles sont gnralement infrieures aux dlais de propaga-
tion de londe acoustique. Par consquent, si un mot de code visite toutes les ralisations
du canal, alors la capacit au sens de Shannon existe et vaut la capacit ergodique.
Hypothse 4.2.2 Le canal de transmission vrie lhypothse WSSUS.
Comme indiqu la section 1.3.2, cette hypothse implique tout dabord que le canal soit
stationnaire au sens large. Comme nous avons pu le montrer dans le chapitre 3, ceci nest
pas vri dans tous les cas puisque la composante moyenne du canal peut uctuer au
cours du temps. Cependant, dans notre contexte o, comme discut prcdemment, on
sintresse la capacit ergodique, lhypothse de stationnarit au sens large nest pas
absurde et peut se justier comme suit :
comme montr dans le chapitre 3, conditionnellement aux uctuations long terme
ou tendances du canal reprsentes par le terme d
l
(k) dans (3.4), le canal est
stationnaire au sens large,
le temps de cohrence des uctuations rapides du canal est trs infrieur aux p-
riodes de uctuations lentes (quelques centaines de milli-secondes vs quelques se-
condes voire dizaines ou centaines de secondes). Autrement dit, sur la dure dun
mot de code, le canal peut tre considr comme stationnaire au sens large.
t
e
l
-
0
0
6
3
8
8
3
6
,
v
e
r
s
i
o
n
1
-
7
N
o
v
2
0
1
1
4.2. MODLE DE TRANSMISSION 69
Lhypothse de diffuseurs dcorrls est plus difcile justier et constitue une limitation
de nos travaux. Dans la mesure o le canal de propagation physique vrie cette hypo-
thse, le canal discret quivalent en bande de base peut aussi vrier celle-ci si le canal de
transmissionest sufsamment sur-chantillonn (cf. section1.3.4). Cependant, si le canal
de propagation prsente des trajets fortement corrls, les rsultats que nous prsentons
dans ce chapitre ne sappliquent plus.
Hypothse 4.2.3 Le bruit est suppos blanc et gaussien et vrie w CN (0,
2
w
I
N
).
Cette hypothse est invoque principalement pour des questions de lisibilit des rsultats
que nous allons prsenter et nest pas une ncessit. Les rsultats de la section4.3peuvent
tre gnraliss au cas o le bruit ambiant ASM est color.
A partir de lhypothse 4.2.2, le canal satisfait les relations suivantes
E{h
l
} =
h
l
1
N
=
h
l
(4.6)
E
_
_
h
l
h
l
__
h
p
h
p
_
_
=R
H
(l ) (l p) (4.7)
o
h
l
et R
H
(l ) sont respectivement la moyenne et la matrice de covariance du l -ime
trajet. Nous dsignons par
2
h
(l ) les lments de la diagonale principale de R
H
(l ) et
2
H
=
L1
l =0
2
h
(l ) (4.8)
2
H
=
L1
l =0
|
h
l
|
2
=
_
1/2
1/2
|
H
()|
2
d, (4.9)
o
H
() est la transforme discrte de la composante moyenne de la rponse impul-
sionnelle, i.e.,
H
() =
l
h
l
e
2j l
. R
H
est une matrice N N qui reprsente la somme
sur tous les trajets de la matrice de covariance R
H
(l ), i.e. R
H
l
R
H
(l ), et
S
H
() est le
spectre Doppler du canal obtenu par la relation suivante
S
H
() =
1
2
H
N1
k=0
[R
H
]
k,1
e
2j k /N
, (4.10)
o [R
H
]
k,1
dsigne le k-ime lment de la premire colonne de R
H
.
Le rapport signal crte sur bruit est dni comme
SNR
peak
=
2
x
2
H
+
2
H
2
w
, (4.11)
et le SNR moyen maximumcomme
SNR
max
av
=
1
SNR
peak
. (4.12)
Le facteur de Rice du l -ime trajet scrit
K
l
=
|
h
l
|
2
2
h
(l )
. (4.13)
t
e
l
-
0
0
6
3
8
8
3
6
,
v
e
r
s
i
o
n
1
-
7
N
o
v
2
0
1
1
70 CHAPITRE 4. SUR LA CAPACIT DU CANAL ACOUSTIQUE SOUS-MARIN
4.3 Bornes de capacit
4.3.1 Dnition de la capacit non-cohrente
Soit F
x
lensemble des fonctions de rpartitions pour lesquelles x vrie la contrainte
sur la puissance crte (4.1) et sur la puissance moyenne (4.2). La capacit non-cohrente
du canal (4.3) sexprime comme [Sethuraman and Hajek, 2005]
C = lim
N
1
N
sup
f
x
F
x
I (y; x) (4.14)
o I (y; x) = h
E
(y) h
E
(y|x) est linformation mutuelle entre y et x avec h
E
(y) lentropie
diffrentielle de y.
Comme discut la section 4.1, la capacit non-cohrente est particulirement dif-
cile caractriser analytiquement. Par consquent, dans la suite de ce chapitre nous
prsentons uniquement des bornes sur la capacit C.
4.3.2 Bornes suprieures
Avant de fournir une borne suprieure qui tient compte explicitement du caractre
doublement dispersif du canal ainsi que de la contrainte de puissance crte sur les don-
nes dentre, notons tout dabordquenappliquant la rgle de la chane sur linformation
mutuelle, une borne assez intuitive peut tre drive. Cette premire borne suprieure,
donne par le thorme 4.3.1, correspond lhypothse idale o le rcepteur connat
chaque ralisation du canal et o les symboles dentre ne sont pas contraints en puis-
sance crte.
Thorme 4.3.1 La capacit non-cohrente du canal (4.3) avec des entres i.i.d. satisfai-
sant la contrainte sur la puissance crte (4.1) et sur la puissance moyenne (4.2) est majore
par la capacit cohrente C
coh
, o
C
coh
= lim
N
1
N
E
H
_
logdet
_
I
N
+
2
x
2
w
HH
__
. (4.15)
Preuve
Notons tout dabord que
I (y; x)
(a)
= I (y; x|H) I (x; H|y)
(b)
I (y; x|H)
o (a) dcoule de la rgle en chane [Medard, 2000, pp. 937-938] et la dpendance mu-
tuelle entre H et x, et (b) vient du fait que I (x; H|y) 0, linformation mutuelle tant
toujours non-ngative. Ds lors,
C lim
N
1
N
sup
f
x
F
x
I (y; x|H)
t
e
l
-
0
0
6
3
8
8
3
6
,
v
e
r
s
i
o
n
1
-
7
N
o
v
2
0
1
1
4.3. BORNES DE CAPACIT 71
avec I (y; x|H) = h
E
(y|H) h
E
(y|x, H). En appliquant [Cover and Thomas, 1991, Tho-
rme 17.2.3] et en remarquant que E
_
y y
|H
_
=
2
x
HH
+
2
w
I
N
avec
2
x
2
x
/, nous
obtenons
h
E
(y|H) E
H
_
logdet
_
e
_
2
x
HH
+
2
w
I
N
___
, x C
N
.
De plus, conditionnellement x et H, y est un vecteur complexe gaussien de matrice de
covariance
2
w
I
N
. Par consquent, x C
N
I (y; x|H) E
H
_
logdet
_
e
_
2
x
HH
+
2
w
I
N
___
N log(e
2
w
)
= E
H
_
logdet
_
I
N
+
2
x
2
w
HH
__
.
On notera que C
coh
correspond la capacit cohrente
3
du canal H sans restriction
sur la puissance crte et avec un SNR moyen gal SNR
max
av
. En plus de son attrait intuitif,
il est montr dans la section 4.4 que cette borne savre trs utile pour certains canaux de
Rice.
Ande caractriser davantage la capacit (4.14), une nouvelle borne suprieure qui in-
tgre la contrainte de puissance crte ainsi que la slectivit temps-frquence du canal est
propose dans le thorme 4.3.2. Cette borne, faisant explicitement apparatre le spectre
Doppler du canal, repose sur de rcents rsultats obtenus dans [Sethuraman and Hajek,
2005; Sethuraman et al., 2009] et [Durisi et al., 2010].
Thorme 4.3.2 La capacit non-cohrente du canal (4.3) avec des entres i.i.d. satisfai-
sant la contrainte sur la puissance crte (4.1) et sur la puissance moyenne (4.2) est majore
par U
DS
peak
, o
U
DS
peak
= max
01
_
1/2
1/2
log
_
1+
2
x
2
w
_
2
H
+|
H
()|
2
_
_
d
_
1/2
1/2
log
_
1+
2
x
2
H
2
w
S
H
()
_
d (4.16)
Preuve
La premire tape de la dmonstrationconsiste remarquer que le terme h
E
(y) de lqua-
tion (4.14) peut tre major par lentropie diffrentielle dun vecteur complexe gaussien y
de mme matrice de covariance que y (voir [Cover and Thomas, 1991, Thorme 17.2.3]).
Ainsi, h
E
(y) logdet
_
e
y
_
, o
y
est la matrice de covariance de y. De plus, condition-
nellement au vecteur dentre x, la sortie du canal y est gaussienne de covariance
y|x
.
Par consquent, la capacit vrie
C sup
p
x
P
x
lim
N
1
N
_
logdet
y
E
x
_
logdet
y|x
__
. (4.17)
3. A notre connaissance, aucune expression analytique nest connue pour lexpression de la capacit
non-cohrente pour les canaux de Rice doublement slectifs. Cependant, (4.15) peut facilement tre va-
lue par des mthodes numriques de type Monte-Carlo.
t
e
l
-
0
0
6
3
8
8
3
6
,
v
e
r
s
i
o
n
1
-
7
N
o
v
2
0
1
1
72 CHAPITRE 4. SUR LA CAPACIT DU CANAL ACOUSTIQUE SOUS-MARIN
La deuxime tape consiste calculer les deux matrices de covariance
y
et
y|x
et
substituer leur logdet dans (4.17). A partir des rsultats obtenus dans lannexe C, on
obtient
lim
N
1
N
logdet
y
=log
2
w
+
_
1/2
1/2
log
_
1+
2
x
2
w
_
2
H
+|
H
()|
2
_
_
d
et
lim
N
1
N
logdet
y|x
= lim
N
log
2
w
+
1
N
logdet
_
I
N
+
1
2
w
R
H
xx
_
.
Par consquent,
C
_
1/2
1/2
log
_
1+
2
x
2
w
_
2
H
+|
H
()|
2
_
_
d lim
N
1
N
E
x
_
logdet
_
I
N
+
1
2
w
R
H
xx
__
.
(4.18)
Finalement, la troisime tape consiste minorer le second terme de (4.18) comme
lim
N
1
N
E
x
_
logdet
_
I
N
+
1
2
w
R
H
xx
__
= lim
N
1
N
_
xX
logdet
_
I
N
+
1
2
w
R
H
xx
_
d f
x
= lim
N
1
N
_
xX
logdet
_
I
N
+
1
2
w
R
H
xx
_
x
2
x
2
d f
x
lim
N
1
N
_
xX
_
_
_ inf
xX
logdet
_
I
N
+
1
2
w
R
H
xx
_
x
2
_
_
_ x
2
d f
x
(4.19)
= lim
N
1
N
_
_
_ inf
xX
logdet
_
I
N
+
1
2
w
R
H
xx
_
x
2
_
_
_ E
_
x
2
_
. .
=
2
x
,
o X = {x C
N
: |x(k)|
2
2
x
, k} est le domaine dintgration de x soumis la
contrainte de puissance crte. Lingalit (4.19) sexplique par le fait que les termes sous
lintgrale sont non-ngatifs et que par consquent une borne infrieure de lesprance
peut tre obtenue en replaant le premier terme par son inmum sur X. Comme R
H
est
une matrice dnie positive, linmumest obtenu pour un vecteur x dont les entres sa-
tisfont |x(k)|
2
{0,
2
x
} [Sethuraman and Hajek, 2005, Sec. VI-A]. A partir de ce rsultat,
nous appliquons ensuite [Durisi et al., 2010, lemme 11, pp. 383], tel que
lim
N
1
N
E
x
_
logdet
_
I
N
+
1
2
w
R
H
xx
__
2
x
2
x
_
1/2
1/2
log
_
1+
2
x
2
H
2
w
S
H
()
_
d.
Le thorme 4.3.2 est ensuite obtenu en notant que 0
2
x
2
x
/ et en posant =
2
x
2
x
.
Ace stade, quelques commentaires sont ncessaires. Premirement, onpeut noter que
U
DS
peak
est la diffrence de deux termes :
t
e
l
-
0
0
6
3
8
8
3
6
,
v
e
r
s
i
o
n
1
-
7
N
o
v
2
0
1
1
4.3. BORNES DE CAPACIT 73
Le premier terme est quivalent la capacit ergodique dun canal invariant dans le
temps dont la rponse en frquence correspond la rponse en frquence moyenne
du canal H (i.e, E
n
_
k
h
n,k
e
2j k
2
_
=
2
H
+|
H
()|
2
).
Le second terme, qui correspond une pnalit, exprime la perte de capacit in-
duite par labsence de CSI la rception. Ce terme prend en compte les uctuations
temporelles du canal au travers du spectre Doppler.
La seconde remarque concerne le paramtre qui est dni par le rapport entre la puis-
sance moyenne et la puissance crte. Les situations o U
DS
peak
est maximis pour plus
petit que 1 correspondent aux cas o il est avantageux de transmettre linformation avec
une puissance moyenne plus faible que le maximum autoris et par consquent de fa-
voriser lamplitude des symboles dinformation pour transmettre linformation. De telles
situations surviennent par exemple fort SNR(voir la section4.4) ou lorsque le canal uc-
tue trop rapidement pour utiliser des modulations module constant (le suivi de la phase
devient trop difcile).
4.3.3 Borne infrieure
En utilisant une gnralisation de lingalit de puissance dentropie donne dans
[Zamir and Feder, 1993], une borne infrieure de la capacit non-cohrente peut tre ob-
tenue.
Thorme 4.3.3 La capacit non-cohrente du canal (4.3) avec des entres i.i.d. satisfai-
sant la contrainte sur la puissance crte (4.1) et sur la puissance moyenne (4.2) est minore
par L
DS
peak
, o
L
DS
peak
= lim
N
1
N
E
H
_
logdet
_
I
N
+
2
x
2
w
HH
__
_
1/2
1/2
log
_
1+
2
x
2
H
2
w
S
H
()
_
d (4.20)
et est un facteur de pondration dexpression
=
_
2/(e), si 1 3
e
2
x
/
/(eK
2
2
x
), si >3,
(4.21)
o K et sont les solutions du systme dquations suivant
_
x
2
Ke
u
2
du = 1,
_
x
2
u
2
Ke
u
2
du =
2
x
2
, (4.22)
qui peut tre rsolu numriquement.
t
e
l
-
0
0
6
3
8
8
3
6
,
v
e
r
s
i
o
n
1
-
7
N
o
v
2
0
1
1
74 CHAPITRE 4. SUR LA CAPACIT DU CANAL ACOUSTIQUE SOUS-MARIN
Preuve
Le point de dpart de la dmonstration du thorme 4.3.3 est une ingalit
sur linformation mutuelle communment utilise [Deng and Haimovich, 2004;
Sethuraman and Hajek, 2005] :
I (y; x) I (y; x|H) I (y; H|x). (4.23)
Le calcul de I (y; H|x) =h
E
(y|x) h
E
(y|x, H) est assez direct car
conditionnellement x, y est distribu suivant une loi gaussienne avec une matrice
de covariance gale
2
w
I
N
+xR
H
x
,
conditionnellement x et H, y est aussi gaussien avec une matrice de covariance
gale
2
w
I
N
.
En appliquant lingalit de Jensen, on obtient I (y; H|x) = E
x
_
logdet(I
N
+xR
H
x
)
_
logdet(I
N
+
2
x
2
w
R
H
) logdet(I
N
+
2
x
2
w
R
H
). De plus, R
H
tant une matrice de Toeplitz, en
appliquant le thorme de Szeg [Gray, 2006], il vient pour N que la capacit du
canal peut tre minore comme
C lim
N
1
N
I (y; x|H)
_
1/2
1/2
log
_
1+
2
x
2
H
2
w
S
H
()
_
d, x satisfaisant (4.1) et (4.2).
(4.24)
Le calcul du premier terme nest pas aussi ais. Cependant, ce terme peut tre mi-
nor en invoquant le lemme de gnralisation de lingalit de puissance dentropie
[Zamir and Feder, 1993]. Le dtail de la minoration du terme I (y; x|H) est donn lan-
nexe D.
Comme la borne suprieure du thorme 4.3.2, la borne infrieure est aussi la diff-
rence entre deux termes. Le premier terme correspond la capacit cohrente du canal
sans limitation sur la puissance crte, comme prsent dans le thorme 4.3.1, mais avec
une perte de SNR exprime par le facteur . Le second terme est nouveau une pnalit
sur la capacit due lincertitude sur ltat du canal. On notera que pour = 1, lexpres-
sion de se simplie en = 2/(e) ce qui correspond une diffrence de 6.3 dB entre le
premier terme de (4.20) et la borne suprieure donne au thorme 4.3.1. Comme repr-
sent sur la gure 4.1, cette diffrence diminue mesure que la contrainte sur la puissance
crte diminue, autrement dit mesure que augmente.
4.4 Illustrations
Pour illustrer lintrt des bornes de capacits dtailles dans la section prcdente,
nous allons maintenant valuer celles-ci au travers de plusieurs scnarios. En utilisant un
modle de canal paramtrique, limpact de divers paramtres sur la capacit sont discuts
la section 4.4.1. Les bornes de capacit appliques un canal ASM rel sont ensuite
analyses la section 4.4.2.
t
e
l
-
0
0
6
3
8
8
3
6
,
v
e
r
s
i
o
n
1
-
7
N
o
v
2
0
1
1
4.4. ILLUSTRATIONS 75
0 2 4 6 8 10
0
2
4
6
8
(dB)
1
0
.
l
o
g
(
d
B
)
Figure 4.1 Evolution de dni lquation (4.21) en fonction de la contrainte .
4.4.1 Evaluation des bornes de capacit sur canaux synthtiques
On suppose ici que le systme de transmission est uniquement contraint par la puis-
sance crte (i.e., = 0 dB). Le canal de propagation simul est un canal WSSUS discret
doublement dispersif avec une fonction de diffusion de type pav droit , savoir
E
k
_
|h
l
(k)|
2
_
=
1
L
, l {0, , L 1} et
S
H
() =
_
1
2
max
, if
1
max
1
max
0, sinon
o
max
1/2 dsigne ltalement Doppler maximal.
La gure 4.2 montre le comportement des bornes de capacit en fonction du nombre
de trajets et de ltalement Doppler. Le rapport signal sur bruit moyen est de 10 dB et
un vanouissement de Rayleigh est considr, i.e.,
l
= 0, l . Comme attendu, les deux
bornes suprieures C
coh
et U
DS
peak
se comportent diffremment et sont par consquent
complmentaires. C
coh
est seulement impacte par la slectivit frquentielle du canal
et dcrot mesure que le nombre de trajets augmente. Cette borne ne dpend pas de
ltalement Doppler car elle correspond au cas cohrent o le rcepteur connat chacune
des ralisations du canal parfaitement. U
DS
peak
savre surtout pertinente lorsque le canal
uctue de sorte que sont taux dentropie soit trs important
4
. Dans ce cas, le terme de
pnalit de (4.16) devient signicatif et rduit drastiquement la capacit. Quant la borne
infrieure L
DS
peak
, elle dpend de L au travers du premier terme de (4.20) et dpend de
lincertitude sur le canal, exprim par
max
, au travers du second terme.
Comme discut dans la section 4.3.2, U
DS
peak
peut fournir des directives sur la concep-
tion de systmes de transmission. Plus prcisment, au travers du paramtre , U
DS
peak
in-
dique lorsquil est pertinent de porter de linformationsur lamplitude du signal transmis.
La gure 4.3 montre lvolution de en fonction du SNR crte pour diffrents facteurs de
Rice. Pour cette simulation, le canal est non slectif en frquence mais varie trs rapide-
ment dans le temps avec
max
= 1/2. On peut noter que pour les forts SNR ou les faibles
4. On notera que pour un spectre Doppler rectangulaire le taux dentropie du canal est une fonction
croissante de
max
(cf. Socheleau et al. [2010])
t
e
l
-
0
0
6
3
8
8
3
6
,
v
e
r
s
i
o
n
1
-
7
N
o
v
2
0
1
1
76 CHAPITRE 4. SUR LA CAPACIT DU CANAL ACOUSTIQUE SOUS-MARIN
10
5
10
4
10
3
10
2
10
1
10
0
0
20
40
60
80
100
0
0.5
1
1.5
2
2.5
3
3.5
4
L
max
C
a
p
a
c
i
t
(
b
i
t
s
/
s
y
m
b
o
l
e
)
U
peak
DS
max(0,L
peak
DS
)
C
coh
Figure 4.2 Bornes de capacit en fonction du nombre de trajets et de ltalement Dop-
pler du canal. =0 dB, SNR
max
av
=SNR
peak
=10 dB et K
l
=0, l >0.
10 5 0 5 10 15 20 25 30
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
SNR
av
max
=SNR
peak
(dB)
=0
=50
=5
...
Figure 4.3 Rapport de puissance crte sur puissance moyenne optimal pour la borne
U
DS
peak
en fonction du SNR crte et du facteur de Rice K (canal mono-trajet, = 0 dB et
max
=1/2).
facteur de Rice, est strictement infrieur 1. Dans ce cas, il est judicieux, daprs U
DS
peak
,
de ne pas transmettre un signal de module constant gale
x
, mais plutt de choisir un
signal dont la puissance moyenne est choisie plus faible que le maximumautoris.
4.4.2 Evaluation des bornes de capacit sur un canal rel
Les bornes de capacit que nous avons proposes peuvent tre values numrique-
ment sur des canaux rels grce notamment aux outils mis en uvre pour le rejeu sto-
chastique de canal. Lintrt dvaluer ces bornes sur canaux rels est de pouvoir compa-
rer lefcacit spectrale des systmes actuels par rapport ce quil est thoriquement pos-
t
e
l
-
0
0
6
3
8
8
3
6
,
v
e
r
s
i
o
n
1
-
7
N
o
v
2
0
1
1
4.4. ILLUSTRATIONS 77
sible datteindre et de connatre ainsi la marge de progression possible. Nous proposons
ici destimer ces bornes sur le canal (b) de la gure 1.6 sond en Mditerrane dans une
bande 1 kHz. En utilisant lalgorithme prsent dans[Bello, 1965], la valeur quadratique
moyenne de ltalement Doppler est estim 1.2 Hz et la valeur quadratique moyenne
de ltalement des retards 8 ms. Les paramtres
2
h
(k) et
h
k
des quations (4.8) et (4.9),
ncessaires pour calculer les bornes, sont estims en utilisant la dcomposition modale
empirique prsente au chapitre 3. Le spectre Doppler
S
H
() est obtenu en utilisant un
priodogramme de Welch moyenn
5
.
Pour valuer les bornes de capacit, nous tudions deux scnarios dintrt pratique
pour les systmes ASM. Le premier scnario correspond au cas o la puissance transmise
est principalement limite par le cot et le volume des amplicateurs, ce qui induit une
contrainte forte sur la puissance crte ( = 0 dB). Le second scnario dcrit le cas o la
contrainte est principalement sur la puissance moyenne cause de problmes de sur-
chauffe des transducteurs ou de limitation dnergie impose aux systmes sur batteries.
Dans le cas de surchauffe des transducteurs, la puissance moyenne doit tre au moins dix
fois infrieure la puissance crte, on choisit donc =10 dB pour le second scnario.
La gure 4.4 montre les diverses bornes de capacit appliques au canal mditerra-
nen (b) de la gure 1.6 pour =0 dB. A titre de rfrence, la capacit C
AWGN
peak
dun canal
AWGN puissance crte limite est aussi trace
6
. La premire observation que lon peut
faire sur cette gure est que les deux bornes suprieures U
DS
peak
et C
coh
sont trs similaires
et trs proches de C
AWGN
peak
. Ceci peut sexpliquer par la nature ricenne forte du canal.
Une grande partie de lnergie ducanal repose sur quelques trajets avec unfacteur de Rice
important (par exemple, le facteur de Rice du trajet retard de =10 ms est approximati-
vement 80). Lanalyse de L
DS
peak
sur la gure 4.4 permet de conclure que pour les gammes
de SNR de fonctionnement des modems ASM dits haut-dbit (environ 15 20 dB), ce ca-
nal devrait permettre de communiquer avec une efcacit spectrale de 2 3 bits/sec/Hz.
Ceci implique que pour les canaux similaires celui considr ici, il reste une marge si-
gnicative daugmentation du dbit par rapport aux modems SISOactuels qui travaillent
environ 1 bit/sec/Hz [Li et al., 2008; Goalic et al., 2008b; Singer et al., 2009]. De la mme
manire, cela signie quil devrait y avoir 5 10 dB de marge entre ce qui est implment
lheure actuelle et la limit thorique ultime.
La gure 4.5 montre les bornes de capacit dans le second scnario o le systme de
transmission est principalement limit par la puissance moyenne. A titre de rfrence, la
capacit C
AWGN
av
dun canal AWGN sans contrainte sur la puissance crte est aussi trace.
On peut observer que U
DS
peak
nest pas trs utile dans ce cas car ltalement Doppler est
relativement faible et assez important. Il faut noter aussi que C
Coh
et L
DS
peak
sont trs
proches. Ceci signie que tant que est sufsamment grand et ltalement Doppler re-
lativement faible (infrieur 2 Hz ici), la connaissance a priori de chaque ralisation du
canal la rception (contexte cohrent) napporte pas de gain signicatif sur la capacit.
Ceci est mis en vidence la gure 4.6 o les bornes sont traces en fonction du rap-
5. Les exprimentations ont montr que les calculs numriques de bornes de capacit effectus sur les
canaux rels taient trs peu dpendants de la mthode destimation du spectre Doppler.
6. On notera que C
AWGN
peak
a t tudie dans [Shamai and Bar-David, 1995] o un algorithme numrique
a t propos pour calculer cette capacit.
t
e
l
-
0
0
6
3
8
8
3
6
,
v
e
r
s
i
o
n
1
-
7
N
o
v
2
0
1
1
78 CHAPITRE 4. SUR LA CAPACIT DU CANAL ACOUSTIQUE SOUS-MARIN
10 5 0 5 10 15 20 25 30
0
1
2
3
4
5
6
7
8
9
10
SNR
av
max
(dB)
C
a
p
a
c
i
t
(
b
i
t
s
/
s
y
m
b
o
l
e
)
U
peak
DS
C
Coh
C
peak
AWGN
L
peak
DS
Figure 4.4 Bornes de capacit appliques un canal rel enregistr en Mditerrane en
fonction du SNR moyen maximal, =0 dB.
10 5 0 5 10 15 20 25 30
0
1
2
3
4
5
6
7
8
9
10
SNR
av
max
(dB)
C
a
p
a
c
i
t
(
b
i
t
s
/
s
y
m
b
o
l
e
)
U
peak
DS
C
Coh
C
av
AWGN
L
peak
DS
Figure 4.5 Bornes de capacit appliques un canal rel enregistr en Mditerrane en
fonction du SNR moyen maximal, =10 dB.
port de puissance crte sur puissance moyenne et pour un SNR moyen de 15 dB. Tant
que 8 dB, une conguration non-cohrente est quasiment quivalente une congu-
ration cohrente et la perte de capacit induite par une limitation de la puissance crte
devient ngligeable.
Les mmes analyses ont t menes pour tous les canaux des gures 1.6 et 1.7 et elles
mnent aux mmes conclusions. De plus, comme discut dans [Passerieux et al., 2011],
les bornes de capacit ne varient pas beaucoup dun canal lautre et laissent penser que
la contrainte sur la puissance crte est un facteur beaucoup plus limitant sur la capacit
que ltalement des retards ou ltalement Doppler.
t
e
l
-
0
0
6
3
8
8
3
6
,
v
e
r
s
i
o
n
1
-
7
N
o
v
2
0
1
1
4.4. ILLUSTRATIONS 79
0 2 4 6 8 10 12 14 16 18 20
0
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5
(dB)
C
a
p
a
c
i
t
(
b
i
t
s
/
s
y
m
b
o
l
e
)
C
Coh
L
peak
DS
Figure 4.6 Bornes de capacit appliques un canal rel enregistr en Mditerrane en
fonction du rapport puissance crte sur puissance moyenne minimal , SNR
max
av
=15 dB.
t
e
l
-
0
0
6
3
8
8
3
6
,
v
e
r
s
i
o
n
1
-
7
N
o
v
2
0
1
1
t
e
l
-
0
0
6
3
8
8
3
6
,
v
e
r
s
i
o
n
1
-
7
N
o
v
2
0
1
1
CHAPITRE
5
Sur loptimisation du
schma de signalisation
La puissance ne consiste pas frapper fort ou souvent,
mais frapper juste
Honor de Balzac, Physiologie du mariage
De part son caractre doublement dispersif et sa limitation en bande passante, le mi-
lieu de propagation acoustique sous-marin (ASM) impose des contraintes fortes sur les
notions trs intriques de robustesse et de dbit qui dnissent les performances des
systmes de communication. Comparativement aux approches mono-porteuses classi-
quement employes en ASM, le multiplexage de linformation transmettre sur une grille
temps-frquence offre lopportunit doptimiser plus de degrs de libert. Ce type dap-
proche favorise par exemple la robustesse des communications en permettant une dia-
gonalisationapproche du canal qui permet de rduire la plage des interfrences dues au
caractre dispersif de celui-ci. Ce gain de robustesse se paie gnralement par une perte
defcacit spectrale lie la faible densit de la grille temps-frquence qui rsulte de la
limitation impose par le thorme de Balian-Low. Dans ce chapitre, on discute des dif-
frents paramtres quil est possible doptimiser pour chercher contrer cette limitation.
On sintresse plus prcisment aux techniques doptimisation de puissance, permettant
damliorer le taux dinformation, partir dune connaissance des statistiques du canal
lmission. On montre notamment que cette optimisation savre bnque pour les
systmes essentiellement limits par leur puissance crte.
5.1 Structure singulire du canal et signalisation de Weyl-
Heisenberg
5.1.1 Diagonalisation approche
En considrant que H est un oprateur compact sur un espace de Hilbert, il peut se
reprsenter sous la forme
H=
+
n=0
n
u
n
, v
n
(t ), (5.1)
o {
n
} reprsente lensemble des valeurs singulires du canal et {u
n
(t )} et {v
n
(t )} ses
fonctions singulires. En transmettant une information x
n
dans le canal sous la forme
s
n
(t ) = x
n
u
n
(t ), elle peut tre facilement estime la rception en projetant la sortie du
canal sur v
n
(t ) car Hs
n
, v
n
=
n
x
n
. Dans ce cas, linformation reue correspond lin-
t
e
l
-
0
0
6
3
8
8
3
6
,
v
e
r
s
i
o
n
1
-
7
N
o
v
2
0
1
1
82 CHAPITRE 5. SUR LOPTIMISATION DU SCHMA DE SIGNALISATION
formation transmise un coefcient prs
1
et aucune interfrence nest observe, sim-
pliant ainsi les algorithmes de rception. Le point critique ici est que lmetteur doit
connatre {u
n
(t )} pralablement la transmission. Ceci est difcilement envisageable
dans un contexte ASM car en gnral, ces fonctions singulires dpendent explicitement
de loprateur Het varient ainsi dune ralisation de canal lautre.
Cependant, au lieu dexiger que Hu
n
=
n
v
n
, on peut toujours chercher des fonctions
g et telles que Hg
soit petit dans un certain sens dnir. Par exemple, comme
discut dans [Kozek, 1997], {
, g, } peut tre dnie comme une structure singulire ap-
proche du canal avec une borne si
E
_
Hg
2
_
, (5.2)
o R
+
. Comme nous allons le voir par la suite, cette structure approche est utile pour
la conception de schmas de signalisation car en choisissant g et qui garantissent un
faible, on restreint et contrle la puissance moyenne de linterfrence observe la r-
ception.
5.1.2 Signalisationde Weyl-Heisenberg
An dapprocher la structure singulire du canal, nous considrons ici lensemble des
fonctions de Weyl-Heisenberg (WH) qui multiplexent linformation en temps-frquence
et permettent une adaptation relativement souple au caractre doublement dispersif du
canal. Ce schma de signalisation, trs gnral, intgre les modulations mono-porteuses
linaires et lOFDM utilises pour les communications haut-dbit, comme cas particu-
liers. Nous dsignons lensemble de WH utilis lmission par
(g(t ), T, F)
=
_
g
k,n
(t ) =g(t kT)e
j 2nFt
, g
2
=1
_
k,nZ
(5.3)
et celui de la rception par
((t ), T, F)
=
_
k,n
(t ) =(t kT)e
j 2nFt
,
2
=1
_
k,nZ
(5.4)
o T, F >0 sont les paramtres de grille temps-frquence du schma de signalisation.
Le signal transmis quivalent en bande de base scrit
x(t ) =
K1
k=0
N1
n=0
x
k,n
g
k,n
(t ), (5.5)
o KT reprsente la dure (approximative) de transmission et N est choisi de sorte que
NF B, avec B la bande disponible. Ce schma sapparente une transmission multi-
porteuse o N reprsente le nombre de sous-porteuses utilises (N = 1 correspondant
aux modulations mono-porteuses linaires). x
k,n
dsigne le symbole de donne transmis
au temps k et la sous-porteuse n. On suppose que les x
k,n
sont i.i.d, de moyenne nulle
et de variance unitaire.
1. On ne considre pas le terme de bruit ici.
t
e
l
-
0
0
6
3
8
8
3
6
,
v
e
r
s
i
o
n
1
-
7
N
o
v
2
0
1
1
5.1. STRUCTURE SINGULIRE DU CANAL ET SIGNALISATION DE WEYL-HEISENBERG
83
A la rception, le signal reu y(t ) est projet sur lensemble {
k,n
(t )}, tel que
y
k,n
=y,
k,n
=Hx,
k,n
+w,
k,n
. .
=w
k,n
(5.6)
o w(t ) dnote le bruit additif. y
k,n
peut se dvelopper comme
y
k,n
=Hg
k,n
,
k,n
. .
=h
k,n
x
k,n
+
K1
=0
N1
=0
(k
,n
)=(k,n)
Hg
k
,n
,
k,n
. .
=
k
,n
;k,n
x
k
,n
+w
k,n
, (5.7)
o le premier terme du ct droit de lquation reprsente le signal utile alors que le se-
cond exprime linterfrence entre symboles et entre sous-porteuses.
Dans notre contexte, trois caractristiques fondamentales des ensembles (g(t ), T, F)
et ((t ), T, F) vont intervenir dans loptimisation de notre systme de communication.
(Bi)orthogonalit : pour un canal idal o y(t ) =x(t ), la dmodulationparfaite (i.e.,
y
k,n
=x
k,n
) est obtenue si et seulement si les fonctions g(t ) et (t ) satisfont la condi-
tion de (bi)orthogonalit
g
k,n
,
k
,n
=(k k
)(n n
). (5.8)
Localisationtemps-frquence : la localisationtemps-frquence dune fonctionpro-
totype g(t ) caractrise ltalement temps-frquence de cette fonction et impacte
directement la puissance de linterfrence la rception. Elle est dnie ci-dessous
comme le produit dun talement en temps et dun talement en frquence
=
_
t
_
t
g(t)
_
|g(t )|
2
dt
_
f
_
f
G(f )
_
|G( f )|
2
d f , (5.9)
o G( f ) est la transforme de Fourier de g(t ) et o
g(t)
=
_
t
t g(t )dt et
G(f )
=
_
f
f G( f )d f sont respectivement les barycentres de g(t ) et G( f ). Cette localisation
est rgie par le principe dHeisenberg, tel que
1
4
, (5.10)
avec lgalit pour les fonctions g(t ) gaussiennes.
Compltude
2
: la compltude de lensemble (g(t ), T, F) dans L
2
(R) impacte direc-
tement lefcacit spectrale du systme de communication et dpend notamment
de la densit 1/TF de la grille temps-frquence. Si (g(t ), T, F) est incomplet dans
L
2
(R), alors il existe des signaux x(t ) L
2
(R) qui ne peuvent pas sexprimer sous
la forme (5.5) mme lorsque K, L +.
Idalement, on souhaiterait obtenir un systme de transmission qui soit
(bi)orthogonal avec des fonctions prototypes bien localises et une densit 1/TF
de grille temps-frquence la plus grande possible de sorte maximiser lefcacit
spectrale. Malheureusement, ces trois conditions ne peuvent pas tre satisfaites si-
multanment cause du thorme de Balian-Low [Christensen, 2003, Th. 4.1.1]. Plus
prcisment [Hlawatsch and Matz, 2011, Ch. 2] :
2. Un espace mtrique M est dit complet ou espace complet si toute suite de Cauchy de M a une limite
dans M (cest--dire quelle converge dans M) [Dieudonn, 1965].
t
e
l
-
0
0
6
3
8
8
3
6
,
v
e
r
s
i
o
n
1
-
7
N
o
v
2
0
1
1
84 CHAPITRE 5. SUR LOPTIMISATION DU SCHMA DE SIGNALISATION
TF 1 est une conditionncessaire pour que la conditionde (bi)orthogonalit(5.8)
soit vrie [Grchenig, 2001, Cor. 7.5.1, Cor. 7.3.2].
Pour TF = 1, il est possible de trouver des ensembles de WH qui soient
(bi)orthogonaux et complets dans L
2
(R) [Christensen, 2003, Th. 8.3.1]. Cependant,
en consquence du thorme de Balian-Low [Christensen, 2003, Th. 4.1.1], ces en-
sembles sont ncessairement mal localiss en temps-frquence.
Pour TF > 1, il est possible davoir simultanment des fonctions prototypes
(bi)orthogonales et bien localises en temps-frquence. Cependant, dans ce cas
lensemble (g(t ), T, F) est ncessairement incomplet dans L
2
(R), entranant alors
une perte defcacit spectrale.
Pour TF < 1, il est possible de construire des ensembles de WH gnrs par des
fonctions prototypes bien localises qui soient aussi (sur-)compltes dans L
2
(R).
Cependant, en consquence de la sur-compltude, linformation porte par le si-
gnal rsultant de (5.5) ne peut pas tre retrouve de faon unique la rception,
mme en labsence de bruit. On exploite plus de degrs de libert que ceux offerts
par le canal.
5.1.3 Compromis interfrence-efcacit spectrale
La discussion de la section prcdente met en vidence la difcult de trouver un
compromis entre une interfrence faible et une utilisation optimale des degrs de libert
offerts par le canal. Le dilemme interfrence-efcacit spectrale se traduit dans la pra-
tique au travers de la rpartition, entre lmetteur et le rcepteur, de lintelligence
et de la complexit de la chane de transmission et notamment de la capacit du r-
cepteur traiter linterfrence. Si lmetteur est intelligent et sadapte aux conditions
de propagation, il peut thoriquement permettre la mise en uvre dun rcepteur plus
simple et donc plus robuste, sans pour autant sacrier le dbit de transmission. Clas-
siquement, les approches doptimisation des ensembles de WH, telles que celles dcrites
dans [Kozek and Molisch, 1998; Matz et al., 2007; Haas and Belore, 1997; Liu et al., 2004],
cherchent, pour TF x, les fonctions prototypes qui maximisent le rapport signal sur in-
terfrence (SIR). Pour mieux comprendre le compromis interfrence-efcacit spectrale,
nous proposons dtudier ici les variations du SIR ainsi que de lefcacit spectrale en
fonction de TF pour des fonctions prototypes g(t ) et (t ) xes.
Inuence de TF sur linterfrence
Le rapport signal sur interfrence sur chaque sous-porteuse n est dni comme
SIR
n
=
E{|h
k,n
|
2
}
E
_
K1
k
=0
N1
n
=0
(k
,n
)=(k,n)
,n
;k,n
2
_
. (5.11)
Soit A
g,
(, ) la fonction dinter-ambigut de g(t ) et (t ) dnie par
A
g,
(, )
=
_
t
g(t )
(t )e
j 2
dt . (5.12)
t
e
l
-
0
0
6
3
8
8
3
6
,
v
e
r
s
i
o
n
1
-
7
N
o
v
2
0
1
1
5.1. STRUCTURE SINGULIRE DU CANAL ET SIGNALISATION DE WEYL-HEISENBERG
85
La puissance du signal ainsi que celle de linterfrence peuvent sexprimer en fonction de
A
g,
(, ). Plus prcisement,
h
k,n
= Hg
k,n
,
k,n
=
_
t
_
G
H
(, )g(t kT )e
j 2nF(t)
e
j 2t
(t kT)e
j 2nFt
dddt
=
_
G
H
(, )
__
t
g
(t kT )(t kT)e
j 2t
dt
_
e
j 2nF
dd
=
_
G
H
(, )A
,g
(, )e
j 2(kTnF)
dd (5.13)
et
,n
;k,n
= Hg
k
,n
,
k,n
=
_
G
H
(, )A
,g
_
+(k
k)T, +(n
n)F
_
e
j 2n
F
e
j 2(+(n
n)F)kT
dd
(5.14)
avec G
H
(, ) la fonction dtalement du canal dnie par (1.19).
En supposant que sur la dure de transmission KT le canal est WSSUS
3
, la puissance
du signal reu la sous-porteuse n sexprime alors comme
2
h
n
=
_
S
H
(, )
A
,g
(, )
2
dd+
,g
(, 0)e
j 2nF
d
2
, (5.15)
o S
H
(, ) et
h
sont dnis lquation (1.22). Le premier terme du ct droit de lqua-
tion reprsente la puissance transporte par la partie uctuante du canal, alors que le
deuxime terme correspond la partie dterministe du canal qui est suppose invariante
sur la dure KT considre. On notera que si
h
est nul, le canal suit un vanouissement
de Rayleigh et dans ce cas, la puissance du signal est indpendante de n.
Sous lhypothse de donnes i.i.d, de moyenne nulle et de variance unitaire, la puis-
3. Les ensembles de Weyl-Heisenberg peuvent tre optimiss aurythme des uctuations des statistiques
du canal, de sorte que sur la dure KT le canal est suppos stationnaire au sens large.
t
e
l
-
0
0
6
3
8
8
3
6
,
v
e
r
s
i
o
n
1
-
7
N
o
v
2
0
1
1
86 CHAPITRE 5. SUR LOPTIMISATION DU SCHMA DE SIGNALISATION
sance du terme dinterfrence peut tre borne par
E
_
K1
=0
N1
=0
(k
,n
)=(k,n)
,n
;k,n
2
_
_
=
K1
=0
N1
=0
(k
,n
)=(k,n)
E
_
,n
;k,n
2
_
=
(k
,n
)=(k,n)
E
_
,n
;k,n
2
_
=
=
(k
,n
)=(k,n)
_
S
H
(, )
A
,g
(+(k
k)T, +(n
n)F)
2
dd
+
e
j 2n
F
A
,g
_
+(k
k)T, (n
n)F
_
e
j 2nF
d
2
=
=
(k
,n
)=(0,0)
_
A
,g
(, )
2
S
H
(k
T, n
F) dd
+
h
k
T
A
,g
(, n
F)e
j 2(n
+n)(k
T)F
d
2
(5.16)
=
2
I
n
. (5.17)
On dnit alors le rapport signal sur interfrence moyen comme
SIR
=
1
N
N1
n=0
2
h
n
2
I
n
. (5.18)
Pour faciliter lvaluation numrique de ce SIR moyen sur des canaux rels, nous pro-
posons de travailler avec des bornes qui ne dpendent pas de la forme de la fonction
de diffusion mais uniquement de son support D donn par la dnition 1.3.6. Cela vite
ainsi davoir une mesure du SIR moyen qui soit sensible la mthode destimation de la
fonction de diffusion. Dans lannexe E, on dtermine les bornes L
SIR
et U
SIR
telles que
L
SIR
SIRU
SIR
.
Sur la gure 5.1, nous avons reprsent ces bornes sur le SIR moyen pour deux canaux
ASM rels en fonction du produit TF et pour diffrentes valeurs de T. Cette gure est
intressante pour dterminer les grandeurs T et F qui permettent de garantir un certain
SIR la rception pour un canal donn. Nous avons considr des fonctions prototypes
rectangulaires classiquement utilises par les systmes multi-porteuses ASM, savoir
g(t ) =
_
1
T
si 0 <t T,
0 sinon
et (t ) =
_
1
TT
g
si 0 <t T T
g
,
0 sinon,
(5.19)
oT
g
reprsente le temps de garde qui vrie T
g
=T1/F. Comme attendu, mesure que
le produit TF augmente, le SIR moyen crot. On remarque aussi que pour des fonctions
prototypes donnes, les gammes de SIR moyen sont fortement dpendantes du canal.
Ainsi, les plages de SIRde la gure 5.1-(a) sont beaucoupplus faibles que celles de la gure
t
e
l
-
0
0
6
3
8
8
3
6
,
v
e
r
s
i
o
n
1
-
7
N
o
v
2
0
1
1
5.1. STRUCTURE SINGULIRE DU CANAL ET SIGNALISATION DE WEYL-HEISENBERG
87
50
100
150
1
1.5
2
0
5
10
15
20
25
T (ms)
TF
S
I
R
(
d
B
)
L
SIR
U
SIR
(a)
10
20
30
40
50
1
1.5
2
10
15
20
25
30
35
40
T (ms)
TF
S
I
R
(
d
B
)
L
SIR
U
SIR
(b)
Figure 5.1 Evolution du rapport signal sur interfrence pour des fonctions prototypes
rectangulaires en fonction du produit TF et pour diffrentes valeurs de T. (a) Canal mdi-
terranen de la gure 1.6-(b), (b) canal atlantique de la gure 1.7-(e).
5.1-(b) car les canaux associs ces gures prsentent des talements temps-frquence
diffrents ; le canal mditerranen de la gure 1.6-(b) prsentant un facteur dtalement
plus important que le canal atlantique de la gure 1.7-(e).
Pour un mme canal et pour un produit TF x, le SIR moyen dpend aussi des fonc-
tions prototypes g(t ) et (t ). La gure 5.2 compare le SIR moyen obtenu en fonction
de TF pour des prototypes rectangulaires et des prototypes gaussiens orthogonaliss
par la procdure IOTA (isotropic orthogonal transform) dcrite dans [Floch et al., 1995;
Strohmer and Beaver, 2003]. Ces derniers offrent lavantage de se rapprocher de la locali-
sation temps-frquence des fonctions gaussiennes tout en tant orthogonaux. Le SIR est
mesur sur le canal atlantique de la gure 1.7-(e) auquel on a volontairement retir
4
la
partie dterministe
h
an de crer un canal articiel plus dispersif en frquence.
4. laide de la mthode EMD dcrite au chapitre 3
t
e
l
-
0
0
6
3
8
8
3
6
,
v
e
r
s
i
o
n
1
-
7
N
o
v
2
0
1
1
88 CHAPITRE 5. SUR LOPTIMISATION DU SCHMA DE SIGNALISATION
1 1.2 1.4 1.6 1.8 2
0
5
10
15
20
25
30
35
TF
S
I
R
(
d
B
)
L
SIR
rect.
U
SIR
rect.
L
SIR
IOTA
U
SIR
IOTA
Figure 5.2 Comparaison du SIR moyen en fonction du produit TF et du choix de fonc-
tions prototypes. Rsultats obtenus sur la partie alatoire du canal atlantique de la gure
1.7-(e) (la composante
h
a volontairement t annule), T =15 ms.
Inuence de TF sur lefcacit spectrale
Alors que laugmentation de TF permet de rduire la puissance de linterfrence et
de abiliser ainsi la transmission, elle implique malheureusement une perte defcacit
spectrale. Lanalyse que nous venons de mener ne rvle pas linuence que
2
h
n
,
2
I
n
et
TF ont sur cette efcacit spectrale. Trouver le bon compromis entre la maximisation
du SIR et la minimisation de TF nest pas direct. Pour donner quelques lments de r-
ponse, nous proposons dtudier deux cas dintrt pratique. Le premier cas correspond
au schma de communicationolinterfrence est uniquement gre au travers de lopti-
misationde g(t ), (t ) et TF, sans la mise en uvre de traitements de linterfrence la r-
ception. Dans ce cas, chaque sous-porteuse est traite individuellement et linterfrence
rsiduelle la rception nest pas exploite. Elle est considre comme un bruit suppl-
mentaire. Le deuxime cas correspond un schma de communication plus avanc o le
rcepteur utilise toute linformation reue, y compris lorsquelle se prsente sous forme
dinterfrence.
Pour le premier cas, nous proposons dvaluer limpact de linterfrence et du produit
TF sur le taux dinformation I (y
k,n
, x
k,n
) en considrant linterfrence comme un bruit
gaussien. En appliquant les rsultats du thorme 4.3.1 au schma de signalisation de
WH, ce taux dinformation peut tre major par
I (y
k,n
, x
k,n
)
1
TF
E
_
log(1+SINR
n
)
_
, (5.20)
o SINR
n
reprsente le rapport signal sur bruit plus interfrence la sous-porteuse n, i.e.,
SINR
n
=
2
h
n
/(
2
I
n
+
2
w
n
) avec
2
w
n
=E
_
|w
k,n
|
2
_
. est une variable alatoire caractrisant
les variations de la puissance instantane du canal, i.e., = |h
k,n
|
2
/
2
h
n
. Une manire de
mesurer limpact de
2
h
n
,
2
I
n
et TF sur lefcacit spectrale est dvaluer, pour diffrentes
t
e
l
-
0
0
6
3
8
8
3
6
,
v
e
r
s
i
o
n
1
-
7
N
o
v
2
0
1
1
5.1. STRUCTURE SINGULIRE DU CANAL ET SIGNALISATION DE WEYL-HEISENBERG
89
valeurs de TF, le gain supplmentaire sur le SINR qui est requis pour compenser la perte
de taux dinformation due lutilisation dune grille de densit sous-critique (TF > 1)
par rapport lutilisation dune grille de densit critique (TF = 1). En effet, laugmenta-
tion de TF implique deux phnomnes contradictoires sur le taux dinformation. Si TF
augmente, le SINR crot, ce qui est favorable au taux dinformation, cependant, la den-
sit 1/TF de la grille temps-frquence diminue, ce qui est dfavorable ce taux. Ainsi, en
supposant que pour TF =1, le rapport signal sur bruit plus interfrence est gal SINR
n
,
on souhaiterait connatre, pour un systme ayant un produit T
> 1, le rapport signal
sur bruit plus interfrence SINR
n
qui est requis pour que lgalit suivante soit vrie
1
TF
..
=1
E
_
log(1+SINR
n
)
_
=
1
T
. .
>1
E
_
log(1+SINR
n
)
_
. (5.21)
En notant que le terme SINR
n
peut sexprimer comme SINR
= qSINR
n
avec q > 1, on
cherche alors le gain q sur le SINR qui est requis pour compenser la perte de taux dinfor-
mation due lutilisationdune grille de densit sous-critique. Cette valeur de q peut tre
connue de faon assez prcise en bornant linformation mutuelle. En utilisant lingalit
de Jensen et les rsultats de [Oyman et al., 2002, Eq.(7)], nous obtenons
1
T
log(1+qSINR
n
e
)
1
T
_
log(1+qSINR
n
)
_
1
T
log(1+qSINR
n
), (5.22)
o 0, 57721566 est la constante dEuler. Par consquent, pour T
> 1 et injectant
(5.22) dans (5.21), il sen suit que
1
SINR
n
_
e
T
E
{log(1+SINR
n
)}
1
_
q
1
SINR
n
e
_
e
T
E
{log(1+SINR
n
)}
1
_
. (5.23)
Pour des fonctions prototypes g(t ) et (t ) xes, on a tout intrt choisir, sil existe, le
plus grand T
> 1 tel que (5.23) soit vrie pour une gamme de SINR donn. Dans ce
cas, on ne perd pas en taux dinformation par rapport au cas TF =1 et en plus on facilite
le travail des traitements de rception puisque la puissance de linterfrence se trouve
diminue.
A titre dexemple, la gure 5.3 reprsente les bornes sur q en fonction du SINR et de
T
et pour un canal vanouissement de Rayleigh. Dans ce cas, est une variable ala-
toire de loi exponentielle et de moyenne unitaire. Les deux bornes sont assez serres pui-
quelles diffrent uniquement par le terme e
qui reprsente une diffrence de 2,5 dB.
On peut observer que le gain q crot en fonction de T
comme attendu mais aussi en
fonction du SINR. Plus prcisment,
lim
SINR
n
+
1
SINR
n
_
e
T
E
{log(1+SINR
n
)}
1
_
=
1
SINR
n
_
e
T
E
{log}
+SINR
T
n
_
+, (5.24)
impliquant que q +pour SINR
n
+.
Cette analyse montre quil faut tre trs prcautionneux dans le choix de TF car la
perte defcacit spectrale due lutilisationdune grille de densit sous-critique (TF >1)
t
e
l
-
0
0
6
3
8
8
3
6
,
v
e
r
s
i
o
n
1
-
7
N
o
v
2
0
1
1
90 CHAPITRE 5. SUR LOPTIMISATION DU SCHMA DE SIGNALISATION
10
0
10
20
30
1
1.2
1.4
1.6
1.8
2
0
5
10
15
20
25
30
SINR (dB) TF
q
(
d
B
)
Borne inf.
Borne sup.
Figure 5.3 Evolution du gain q de SINR requis pour compenser la perte dinformation
mutuelle due lutilisation dune grille de densit sous-critique.
peut tre plus signicative que laugmentation de cette efcacit rsultante de lamlio-
ration du SINR. A linverse, choisir TF = 1 ne garantit pas ncessairement une efcacit
spectrale optimale. En dautres termes, le choix de TF doit se faire au cas par cas en fonc-
tion des conditions de propagations et des fonctions prototypes g(t ) et (t ) choisies. Dans
la littrature, il existe cependant des rgles empiriques gnrales qui permettent dobte-
nir un bon compromis entre la limitationde linterfrence et la perte defcacit spectrale
dans le cas o linterfrence nest pas traite la rception. Classiquement, il est prco-
nis de choisir [Kozek and Molisch, 1998; Matz et al., 2007; Durisi et al., 2010]
T
F
=
max
max
et TF 1, 2. (5.25)
Si lon considre maintenant la cas o le rcepteur utilise toute linformation reue, y
compris lorsquelle se prsente sous forme dinterfrence, le taux dinformation ne sex-
prime plus sous la forme (5.20) car toutes les sous-porteuses sont traites conjointement
et non plus individuellement. Par analogie avec les systmes MIMO et en considrant
une dure de transmission KT avec un systme constitu de N sous-porteuses, la rela-
tion (5.7) entre les symboles transmis et les symboles observs peut se reprsenter sous la
forme matricielle suivante
y
W H
= H
W H
x
W H
+w
W H
, (5.26)
o x
W H
est le vecteur de donnes, de dimension NK 1, y
W H
est le vecteur des sym-
boles observs et w
W H
est le vecteur bruit. La matrice H
W H
, de dimension NK NK,
reprsentant le canal de transmission, sexprime comme
H
W H
=
_
_
_
H
(0,0)
W H
H
(0,K)
W H
.
.
.
.
.
.
.
.
.
H
(K,0)
W H
H
(K,K)
W H
_
_
_, (5.27)
t
e
l
-
0
0
6
3
8
8
3
6
,
v
e
r
s
i
o
n
1
-
7
N
o
v
2
0
1
1
5.2. OPTIMISATIONDE PUISSANCE 91
o le bloc matriciel H
(k,k
)
W H
de taille N N est donn par
_
H
(k,k
)
W H
_
n,n
=Hg
k
,n
,
k,n
. (5.28)
La matrice H
W H
dpend donc des fonctions prototypes ainsi que du produit TF. En se
basant sur le thorme 4.3.1, linformation mutuelle entre le vecteur dentre x
W H
et le
vecteur y
W H
de sortie du canal peut tre majore par
I (y
W H
; x
W H
)
1
TF K
E
H
W H
_
logdet
_
H
W H
H
W H
+R
w
W H
_
logdet
_
R
w
W H
_
_
. (5.29)
On suppose ici que les donnes sont i.i.d et de puissance unitaire. R
w
W H
reprsente la
matrice, de dimension NK NK, de covariance du bruit aprs projection sur la base de
WHde rception. Onnotera que mme dans le cas ole bruit physique ambiant est blanc,
cette matrice nest pas ncessairement diagonale dufait de la projectionsur la base de WH
de rception.
La gure 5.4 reprsente lvolution de la borne sur le taux dinformation, donne par
lquation (5.29), pour deux canaux ASM rels, en fonction du produit TF et pour diff-
rentes valeurs de rapport signal sur bruit. Le rapport signal sur bruit est ici dni comme
KN/tr(R
w
) (la puissance des donnes transmises est suppose unitaire). Pour les simu-
lations, nous avons considr des fonctions prototypes rectangulaires. Les deux courbes
de la gure 5.4 indiquent clairement que si lon veut maximiser le taux dinformation,
il faut choisir une grille de densit critique (TF = 1). Ceci est thorique et suppose que
toute linformation convoye par linterfrence est correctement traite la rception.
Dans la pratique, ce rsultat est pondrer car les traitements de rception ne sont ja-
mais parfaits. Ainsi, en fonction des performances du rcepteur, il conviendra peut-tre
de choisir TF lgrement suprieur 1. Onnotera aussi que la perte sur le taux dinforma-
tion due lutilisation dune grille de densit sous-critique est infrieure au produit TF.
Par exemple, si lon choisit une grille de produit TF = 1.2, la perte observe par rapport
au taux dinformation correspondant lutilisation dun grille critique TF = 1, est dun
facteur infrieur 1.2.
5.2 Optimisation de puissance
5.2.1 Motivations
En plus dtre impacte par le choix des ensembles de WH utiliss dans la chane de
transmission, linformation mutuelle entre lentre et la sortie du canal dpend de la ma-
nire dont la puissance dmission disponible est exploite. Relativement linformation
mutuelle, les signalisations de type WH sont attrayantes car elles offrent lopportunit
doptimiser dans le temps et en frquence la puissance alloue en fonction des carac-
tristiques du canal. Ainsi, partir dune connaissance lmission de ltat du canal,
connaissance qui est statistique dans notre contexte, il est possible daccrotre le dbit
dinformation en ajustant la puissance alloue sur chaque sous-porteuse en fonction de
la slectivit frquentielle du canal. Cest ce qui correspond aux stratgies dallocation
t
e
l
-
0
0
6
3
8
8
3
6
,
v
e
r
s
i
o
n
1
-
7
N
o
v
2
0
1
1
92 CHAPITRE 5. SUR LOPTIMISATION DU SCHMA DE SIGNALISATION
10
0
10
20
30
1
1.5
2
0
2
4
6
8
10
SNR (dB)
TF
T
a
u
x
d
i
n
f
.
(
b
i
t
s
/
u
t
i
l
i
s
a
t
i
o
n
c
a
n
a
l
)
1
2
3
4
5
6
7
8
(a)
10
0
10
20
30
1
1.5
2
0
2
4
6
8
10
SNR (dB)
TF
T
a
u
x
d
i
n
f
.
(
b
i
t
s
/
u
t
i
l
i
s
a
t
i
o
n
c
a
n
a
l
)
1
2
3
4
5
6
7
8
9
(b)
Figure 5.4 Evolution du taux dinformation en fonction du rapport signal sur bruit et
du produit TF pour un systme capable de traiter linterfrence la rception. (a) Canal
mditerranen de la gure 1.6-(b) avec T =75 ms, (b) canal atlantique de la gure 1.7-(e)
avec T =10 ms.
de type water-lling [Gallager, 1968; Chow et al., 1995]. Cependant, ces opportunits
doptimisation doivent tre contrastes avec lun des inconvnients majeurs des sch-
mas multi-porteuses de WH, savoir leur fort rapport puissance crte sur puissance
moyenne (ou PAPR pour peak-to-average power ratio). Ce fort PAPR rsulte de laddi-
tion cohrente des diffrentes sous-porteuses et peut imposer aux composants matriels
limits en puissance crte, tels que les amplicateurs de puissance ou les transducteurs,
de fonctionner avec un recul de puissance (power back-off) important, rduisant ainsi
la puissance moyenne dmission. Le fort PAPR peut aussi induire des distorsions non li-
naires lorsque le signal transmis excde le niveau de saturation [Ochiai and Imai, 2002;
Bahai et al., 2002]. Linformation mutuelle tant directement dpendante du rapport si-
gnal sur bruit la rception, unrecul de puissance consquent oude la distorsionpeuvent
alors limiter les performances du systme de communication.
Les opportunits offertes par les schma de signalisations de WH ainsi que leurs li-
mites soulvent plusieurs questions du point de vue de la conception de systmes de
t
e
l
-
0
0
6
3
8
8
3
6
,
v
e
r
s
i
o
n
1
-
7
N
o
v
2
0
1
1
5.2. OPTIMISATIONDE PUISSANCE 93
communication. Une des questions cl est de dterminer la meilleure stratgie de ges-
tion de la puissance disponible an de maximiser le dbit dinformation. Par exemple,
est-il utile doptimiser la puissance alloue sur les sous-porteuses en fonction des carac-
tristiques du canal ? En ce qui concerne la puissance crte, la manire de grer le fort
PAPR la transmission reste assez obscure. Doit-on autoriser une certaine saturation en
sortie de lamplicateur de puissance an de maximiser le SNR la rception, quitte
introduire un peu de distorsion? De combien doit-on reculer la puissance moyenne
de transmission par rapport la puissance crte ? Le dilemme distorsion/recul de puis-
sance na pas de solution vidente et suggre la possibilit dun compromis optimal. De
plus, doit-on chercher rduire le PAPR du signal avant amplication de sorte limiter le
phnomne de saturation? Il existe en effet de nombreuses techniques de rduction de
PAPR dans la littrature [Han and Lee, 2005; Rojo and Stojanovic, 2010]. Le problme est
quelles ne sont pas gratuites, elles requirent la transmission de pilotes supplmentaires
qui rduisent le dbit ou bien ncessitent de la puissance supplmentaire pour rguler le
PAPR.
Lobjectif de cette section est de fournir quelques rponses ces questions an
didentier des stratgies dallocation de puissance favorables au dbit dinformation. Il
existe de nombreuses tudes ddies ces questions pour des communications radio-
frquence [Papandreou and Antonakopoulos, 2008], mais seuls quelques rsultats pr-
liminaires sont disponibles dans un contexte ASM [Ophir et al., 2006; Huang, 2010]. La
faible vitesse de propagation des ondes acoustiques impose des contraintes fortes sur la
nature du CSI disponible lmission qui, couple avec la limitation de puissance crte,
rend les stratgies conues pour les communications radio-frquence difcilement appli-
cables. De la mme manire, les seuls rsultats disponibles dans un contexte ASM ntant
en fait que des applications directes de schma radio-frquence, ils savrent eux aussi
difcilement exploitables.
Par consquent, dans cette section, nous cherchons identier des directives dallo-
cation de puissance favorables au dbit dinformation pour des systmes ASM de type
WH, limits en puissance crte et ayant connaissance des statistiques du canal lmis-
sion. Nous proposons tout dabord une modlisation des schmas de WH contraints en
puissance crte et discutons ensuite de ltalement du canal. Loptimisation de puissance
sur des canaux sous-tals est aborde par la suite et des valuations numriques sont
ralises pour identier des directives de conception. En n de section, nous discutons
de loptimisation de puissance sur des canaux sur-tals.
5.2.2 Schma de Weyl-Heisenberg contraint en puissance crte
Si lon considre la possibilit dallouer la puissance de faon non-uniforme dans le
domaine frquentiel et de transmettre un signal distordu du fait de la saturation de lam-
plicateur de puissance, le modle de transmissiondonn par les quations (5.5) et (5.35)
doit tre rcrit. Nous considrons toujours des donnes x
k,n
indpendantes, centres et
de puissance unitaire. Comme indiqu la gure 5.5, nous dsignons par
n
la puissance
alloue la n-ime sous-porteuse et par convenance nous normalisons cette puissance
telle que
N1
n=0
n
=1.
t
e
l
-
0
0
6
3
8
8
3
6
,
v
e
r
s
i
o
n
1
-
7
N
o
v
2
0
1
1
94 CHAPITRE 5. SUR LOPTIMISATION DU SCHMA DE SIGNALISATION
Figure 5.5 Modle du signal multi-porteuse contraint en puissance crte
Le gain de lamplicateur de puissance est modlis par un facteur
_
, o
2
d-
signe la puissance crte et une variable utilise pour contrler le gain de cette ampli-
cateur. Les non-linarits rsultantes de la limitation en puissance crte sont modlises
par une fonctionsans mmoire c(), dnie comme unlimiteur damplitude idal, savoir
x(t ) =c(z(t )) =
_
z(t ), |z(t )|
2
2
e
i z(t)
, |z(t )|
2
>
2
,
(5.30)
o x(t ) est le signal transmis et o z(t ) =
_
K1
k=0
N1
n=0
x
k,n
g
k,n
(t ). La sortie du limiteur
peut aussi sexprimer comme
x(t ) =z(t ) +d(t ), (5.31)
o d(t ) reprsente la distorsion cre par c() et est une constante valeur relle. Par
convenance mathmatique, ce modle est communment employ [Raich et al., 2005;
Ochiai, 2003] pour reprsenter les signaux tronqus en amplitude car il linarise
un problme non linaire. Ce modle sapplique quel que soit z(t ) et nest pas unique
puisque nimporte quelle valeur relle peut tre choisie pour . Le choix de dpend du
type de simplications ncessaires lorsque lon manipule x(t ). Des valeurs pertinentes
de sont discutes dans la section 5.2.4. La distorsion cre par c() est la fois prsente
dans la bande de transmission, mais aussi en dehors de cette bande. Le distorsion dans la
bande peut tre vue comme du bruit qui dgrade les performances de rception alors que
la distorsion en dehors de cette bande est vue comme de linterfrence par les systmes
qui transmettent dans des bandes de frquence adjacentes. Typiquement, pour les sys-
tmes de radiocommunication, cette distorsion en dehors de la bande est un problme
puisquelle doit tre ltre du fait de la rglementation stricte dutilisation du spectre qui
exige la suppression de lobes secondaires. Dans un contexte ASM, cette suppression nest
pas requise car le spectre nest pas rgul. De plus, les transducteurs acoustiques tant g-
nralement limits en bande passante, la majeure partie de la distorsion hors bande sera
automatiquement ltre lors de la conversion du signal lectrique en signal acoustique.
t
e
l
-
0
0
6
3
8
8
3
6
,
v
e
r
s
i
o
n
1
-
7
N
o
v
2
0
1
1
5.2. OPTIMISATIONDE PUISSANCE 95
Comme discut dans le chapitre 4, en plus de la limitation de puissance crte, les mo-
dems ASM peuvent aussi tre contraints en puissance moyenne de sorte que
1
T
_
T
0
E{|x(t )|
2
}dt
, 1, (5.32)
o, pour rappel, est une constante reprsentant le rapport minimal entre la puissance
crte et la puissance moyenne tolr par le systme.
Pour maximiser le dbit dinformation par rapport la puissance, les schmas de
signalisation temps-frquence de WH offrent lopportunit doptimiser conjointement
deux degrs de libert. Le premier est le vecteur dallocation de puissance des sous-
porteuses =[
0
, ,
N1
] qui peut tre optimis en fonction de la slectivit frquen-
tielle du canal. Le second degr est le recul de puissance qui rgule la puissance moyenne
transmise et qui est dni comme
P
bo
2
1
T
_
T
0
E{|x(t )|
2
}dt
, (5.33)
avec P
bo
vriant P
bo
. Un P
bo
faible favorise le SNR la rception mais peut induire
beaucoup de distorsion et linverse un P
bo
fort limite la distorsion mais rduit aussi
la puissance moyenne transmise. Un des objectifs du travail prsent dans cette section
est donc de trouver le bon compromis. Comme montr dans la section 5.2.4, loptimisa-
tion du recul de puissance est ralise en rglant le paramtre . En effet, en supposant
que z(t ) est moyenne nulle et distribu suivant un loi gaussienne [Wei et al., 2010], on
montre que P
bo
scrit
P
bo
=
1e
. (5.34)
An de satisfaire la contrainte sur la puissance moyenne (5.32), doit vrier +
W(e
), o W(.) dsigne la fonction de Lambert, la fonction inverse de f (w) =we
w
.
5.2.3 Sur ltalement du canal de transmission
La formulationdu problme doptimisationde puissance dpend des caractristiques
du canal de transmission et plus particulirement de son talement temps-frquence.
Comme indiqu la dnition 1.3.6, ltalement du canal est quanti au travers du fac-
teur
H
=4
max
max
.
Classiquement [Kozek, 1997; Bello, 1963], un canal est dit sous-tal lorsque
H
<1 et
sur-tal sinon. En ASM, les canaux petit-fond sont majoritairement sous-tals et pr-
sentent un facteur dtalement de lordre de 10
2
, cest le cas des canaux des gures 1.6
et 1.7 par exemple. Cependant, dans des congurations particulires comme la transmis-
sion dans des canaux de surface ou sur des zones ctires trs petit-fond o les vagues se
cassent, ce facteur dtalement peut tre compris entre 1 et 10 [van Walree, 2011].
Si lon distingue les canaux sous-tals des autres, cest parce quils prsentent des ca-
ractristiques intressantes du point de vue de loptimisationdu schma de signalisation.
En effet, ceux-ci sont approximativement normaux [Kozek, 1997] de sorte que la dcom-
position en valeurs singulires de (5.1) peut tre remplace par une dcomposition en
t
e
l
-
0
0
6
3
8
8
3
6
,
v
e
r
s
i
o
n
1
-
7
N
o
v
2
0
1
1
96 CHAPITRE 5. SUR LOPTIMISATION DU SCHMA DE SIGNALISATION
valeurs propres. Plus important encore, mme si H est un oprateur alatoire, ses fonc-
tions propres peuvent tre approches par des fonctions dterministes bien localises en
temps et en frquence. Plus prcisment [Durisi et al., 2010], toute fonction g(t ) dtermi-
niste dnergie unitaire qui est bien localise en temps et en frquence est une fonction
propre approche de H au sens des moindres carrs, i.e., lerreur quadratique moyenne
E{Hg, gg Hg
2
} est petite si H est sous-tal. Cette erreur est minimise si g(t ) est
choisie telle que A
g,g
(, ) 1 sur le support D de la fonction de diffusion. Dans ce cas, la
relation entre lentre et la sortie du canal (5.7) devient
y
k,n
h
k,n
x
k,n
+w
k,n
. (5.35)
La puissance de linterfrence est alors ngligeable. On notera que comme discut dans
la section 5.1, lcriture du signal reu sous la forme (5.35) implique de choisir une grille
temps-frquence sous-critique telle que TF > 1. Pour tre plus prcis, lapproximation
(5.35) ne dpend pas uniquement de ltalement
H
. Elle dpend aussi du rapport signal
sur bruit
5
et surtout des choix de conception. Pour optimiser le taux dinformation et
rduire au maximum le produit TF, le concepteur peut volontairement choisir des fonc-
tions prototypes g(t ) et (t ) telles que (5.35) ne soit pas vrie mme lorsque
H
est trs
petit. Cest le cas, par exemple, duschma de signalisationpropos par Hwang et Schniter
dans [Hwang and Schniter, 2009] o de linterfrence entre sous-porteuses est volontai-
rement introduite lmission pour optimiser lefcacit spectrale et limiter le nombre
de coefcients de lgaliseur frquentiel implment la rception.
On notera que par abus de langage, lorsque nous voquons les canaux sous-tals
dans la suite de ce chapitre, nous sous-entendons que ces canaux vrient lapproxima-
tion (5.35).
5.2.4 Optimisation de puissance sur des canaux sous-tals
Nous voulons maintenant identier les stratgies dallocationde puissance favorables
au dbit ou plus exactement favorables au taux dinformation. Comme au chapitre pr-
cdent, le canal est suppos ergodique et le taux dinformation est dni comme linfor-
mationmutuelle entre les symboles de donnes transmis et reus, moyenn sur toutes les
ralisations du canal
6
.
En considrant un canal sous-tal et en intgrant la contrainte sur la puissance crte,
les symboles observs la rception, donns initialement par (5.35), sexpriment mainte-
nant comme
y
k,n
_
h
k,n
_
x
k,n
+d
k,n
_
+w
k,n
, (5.36)
o d
k,n
=d,
k,n
/
_
.
5. Pour un canal donn et des fonctions prototypes xes, cette approximation peut tre vraie pour un
SNR infrieur 30 dB par exemple, mais fausse pour des SNR plus importants.
6. Cette dnition est contraster avec les canaux non ergodiques o la probabilit de coupure est ha-
bituellement utilise comme mtrique [Yao and Giannakis, 2005].
t
e
l
-
0
0
6
3
8
8
3
6
,
v
e
r
s
i
o
n
1
-
7
N
o
v
2
0
1
1
5.2. OPTIMISATIONDE PUISSANCE 97
En supposant que chaque sous-porteuse est traite individuellement, le taux dinfor-
mation scrit
I
_
y; x
_
=
1
TF
N1
n=0
I
_
y
k,n
; x
k,n
_
, (5.37)
o I
_
y
k,n
; x
k,n
_
peut se dvelopper en utilisant la rgle en chane comme I
_
y
k,n
; x
k,n
_
=
I
_
y
k,n
; x
k,n
|h
k,n
_
I
_
x
k,n
; h
k,n
|y
k,n
_
. Le premier terme de droite reprsente linformation
mutuelle lorsque le canal est parfaitement connu la rception et le second reprsente
la pnalit sur le taux dinformation due la connaissance imparfaite du canal la r-
ception. Ce second terme exprime en fait la diffrence entre le contexte cohrent et celui
non-cohrent. Comme discut au chapitre 4, les rcepteurs ASM ne sont pas aids par
des gnies et le contexte rel est non-cohrent.
Cependant, le terme de pnalit est gnralement mal connu car il dpend la fois
du canal, des symboles transmis ainsi que des performances des algorithmes de rcep-
tion comme lestimateur de canal. Lobjectif de cette section tant didentier des direc-
tives gnrales sur lallocation de puissance, nous ne souhaitons pas nous attacher un
contexte trop particulier. Par consquent, nous considrons des symboles transmis issus
dun alphabet gaussien et dnissons la fonction de cot caractrisant le taux dinforma-
tion comme
R=
1
TF
N1
n=0
I
_
y
k,n
; x
k,n
|h
k,n
_
. (5.38)
Ntant pas en mesure dexprimer simplement linformation mutuelle (5.37) dans un
contexte gnral, cette fonction R peut tre vue comme une borne suprieure sur le taux
dinformation rel.
Notre problme doptimisation de puissance peut alors se formuler comme
max
,P
bo
R,
sous les contraintes
N1
n=0
n
=1,
+W(e
). (5.39)
Pour dterminer lexpression de R, nous modlisons tout dabord la distorsion d
k,n
comme un bruit additif gaussien, ce qui est une hypothse communment admise
lorsque N est grand [Banelli and Cacopardi, 2000; Ochiai, 2003]. Notons que la validit
de cette hypothse diminue mesure que le recul de puissance P
bo
augmente. Pour de
forts reculs de puissance, la distorsion tend en effet ressembler un bruit impulsif
[Bahai et al., 2002]. Toutefois, le bnce sur linformation mutuelle de la diminution de
la distorsion (due laugmentation du recul de puissance) compense gnralement lap-
proximation de modlisation.
Linformation mutuelle I
_
y
n
; x
n
|h
n
_
peut tre dtermine en caractrisant les distri-
butions de y
k,n
|h
k,n
et y
k,n
|x
k,n
, h
k,n
. Comme x
k,n
et d
k,n
sont supposs gaussiens, nous
avons
y
k,n
|h
k,n
CN
_
0,
|h
k,n
|
2
n
+E
_
|d
k,n
|
2
_
+2E
_
x
k,n
d
k,n
__
+
2
w
n
_
(5.40)
t
e
l
-
0
0
6
3
8
8
3
6
,
v
e
r
s
i
o
n
1
-
7
N
o
v
2
0
1
1
98 CHAPITRE 5. SUR LOPTIMISATION DU SCHMA DE SIGNALISATION
0 50 100 150 200 250 300 350 400 450 500
100
90
80
70
60
50
40
30
20
n
P
u
i
s
s
a
n
c
e
(
d
B
)
n
2E{x
k,n
d
k,n
}
Figure 5.6 Comparaison entre le terme dintercorrlation 2E
_
x
k,n
d
k,n
_
et la densit
spectrale de puissance
2
n
.
et
y
k,n
|x
k,n
, h
k,n
CN
_
_
h
k,n
x
k,n
,
|h
k,n
|
2
E
_
|d
k,n
|
2
_
+
2
w
n
_
(5.41)
Par consquent,
R=
1
TF
N1
n=0
E
h
k,n
_
_
_
log
_
_
1+
n
+2E
_
x
k,n
d
k,n
_
E
_
|d
k,n
|
2
_
+
2
w
n
/(
2
|h
k,n
|
2
)
_
_
_
_
_
, (5.42)
Thoriquement, le terme dintercorrlation E
_
x
k,n
d
k,n
_
est non nul. Cependant, dans la
plupart des cas ce terme est ngligeable dans le sens o R peut tre approch comme
R
1
TF
N1
n=0
E
h
k,n
_
log(1+SNDR(n))
_
, (5.43)
o SNDR(n) dnote le rapport signal sur bruit plus distorsion la sous-porteuse n
SNDR(n) =
n
E
_
|d
k,n
|
2
_
+
2
w
n
/(
2
|h
k,n
|
2
)
. (5.44)
Cette approximation peut se justier doublement. Premirement, la distorsion sur la
sous-porteuse n dpend des donnes sur toutes les sous-porteuses et pas uniquement de
x
k,n
. Ds lors, pour N grand, la contributionde x
k,n
sur d
k,n
est limite. Plus important,
peut tre choisi de sorte que d(t ) soit dcorrl de z(t ), impliquant une trs faible inter-
corrlation E
_
x
k,n
d
k,n
_
. Ce point est illustr la gure 5.6 o le terme 2E
_
x
k,n
d
k,n
_
est
compar la densit spectrale de puissance
2
n
pour un systme OFDMavec une fonc-
tionprototype rectangulaire. Dans cette exemple, N =512, les
n
sont tirs alatoirement
suivant une loi uniforme et le signal transmis est fortement distordu avec (,
2
) =(1, 1).
t
e
l
-
0
0
6
3
8
8
3
6
,
v
e
r
s
i
o
n
1
-
7
N
o
v
2
0
1
1
5.2. OPTIMISATIONDE PUISSANCE 99
Du fait de lexpression de R donne lquation (5.43), le problme doptimisation
(5.39) ne peut pas tre rsolu analytiquement. Cependant, comme montr ci-aprs, des
solutions approches peuvent tre obtenues laide de mthodes numriques.
5.2.5 valuation numrique pour les canaux sous-tals
An didentier les stratgies dallocationde puissance favorables au dbit dinforma-
tion, nous considrons ici deux canaux rels sous-tals dont les rponses en frquence
sont donnes la gure 5.7. Le canal (a) de cette gure a t sond en rade de Brest sur
une distance de 2 km et le canal (b) est issu dexprimentations menes par Woods Hole
Oceanographic Institution au large de Marthas Vineyard (USA) en 2008 sur une distance
de 1 km. Comme loptimisation de puissance repose sur la connaissance des statistiques
du canal, ces deux canaux ont t choisis pour illustrer les rsultats car ils prsentent
des rponses en frquence diffrentes. Le canal (a) prsente une slectivit frquentielle
moyenne signicative alors que les densits de probabilit des sous-canaux frquentiels
sont quasiment identiques pour le canal (b).
An de satisfaire la condition (5.35), nous considrons des fonctions prototypes rec-
tangulaires de produit TF =1.2 avec T =48 ms pour le canal (a) (soit 64 sous-porteuses)
et T 24 ms (soit 128 sous-porteuses). Ces congurations garantissent un rapport signal
sur interfrence SIR suprieur 35 dB. Pour sapprocher des caractristiques des signaux
temps continu, notamment par rapport aux valeurs de puissance crte, les signaux si-
muls sont sur-chantillonns dun facteur 16.
La solution du problme doptimisation (5.39) est ici obtenue laide de mthodes
numriques de type Sequential Quadratic Programming [Bonnans et al., 2006]. Nous
rappelons que le but de cette analyse nest pas de se concentrer sur les questions de mise
en uvre et de proposer des algorithmes doptimisation peu coteux. Le but est unique-
ment danalyser les gains potentiels apports par loptimisationde puissance ande four-
nir des directives gnrales sur la gestion de cette puissance.
10.4 10.6 10.8 11 11.2 11.4 11.6 11.8 12
40
30
20
10
0
10
Frquence (kHz)
P
u
i
s
s
a
n
c
e
(
d
B
)
9 10 11 12 13 14 15 16
40
30
20
10
0
10
Frquence (kHz)
P
u
i
s
s
a
n
c
e
(
d
B
)
(a) (b)
Figure 5.7 Exemples de rponse enfrquence de canaux ASMsous-tals. Ligne pleine :
rponse moyenne, lignes enpointill : exemples de rponses instantanes. (a) Canal sond
en rade de Brest, (b) canal sond au large de Marthas Vineyard (USA)
t
e
l
-
0
0
6
3
8
8
3
6
,
v
e
r
s
i
o
n
1
-
7
N
o
v
2
0
1
1
100 CHAPITRE 5. SUR LOPTIMISATION DU SCHMA DE SIGNALISATION
10 5 0 5 10 15 20 25 30
0
1
2
3
4
5
6
SNR
av
max
(dB)
R
(
b
i
t
s
/
u
t
i
l
i
s
a
t
i
o
n
d
u
c
a
n
a
l
)
Canal (a)
Canal (b)
(a)
10 5 0 5 10 15 20 25 30
0
1
2
3
4
5
6
7
P
b
o
o
p
t
(
d
B
)
SNR
av
max
(dB)
Canal (a)
Canal (b)
(b)
Figure 5.8 (a) Taux dinformation optimal en fonction du rapport signal sur bruit. (b)
Recul de puissance optimal en fonction du rapport signal sur bruit. =0 dB.
Limitationen puissance crte uniquement
Nous considrons tout dabord le cas o la puissance de transmission est principale-
ment limite par le cot et le volume des amplicateurs de sorte que la puissance crte
soit la contrainte unique, i.e., =0 dB.
La gure 5.8-(a) montre, pour les deux canaux, lvolution du taux dinformation en
fonction du SNR moyen maximumdni lquation (4.12). Malgr leurs diffrences, les
deux canaux prsentent un taux dinformation optimal trs similaire. Sur la gure 5.8-(b)
nous pouvons voir lvolution du recul de puissance optimal en fonction du SNR moyen
maximum. Cette gure indique quautoriser de la distorsion lmission peut tre bn-
que pour le dbit dinformation. En effet, faible SNR, le systme de communication
doit favoriser la puissance moyenne de transmission, quitte introduire une forte distor-
sion (i.e., faible P
bo
). Par contre, mesure que le SNR augmente, le recul de puissance
optimal augmente lui aussi, limitant ainsi la distorsion.
Pour dissocier les effets de loptimisation de lallocation de puissance des sous-
t
e
l
-
0
0
6
3
8
8
3
6
,
v
e
r
s
i
o
n
1
-
7
N
o
v
2
0
1
1
5.2. OPTIMISATIONDE PUISSANCE 101
10 5 0 5 10 15 20 25 30
0
1
2
3
4
5
6
SNR
av
max
(dB)
R
(
b
i
t
s
/
u
t
i
l
i
s
a
t
i
o
n
d
u
c
a
n
a
l
)
Optimisation conjointe de et
Optimisation de seulement ( uniforme)
(a)
0
20
40
60
10
0
10
20
30
0
1
2
3
4
5
n
SNR
av
max
(dB)
N
.
n
(b)
Figure 5.9 Effet de loptimisation de la puissance des sous-porteuses sur le taux din-
formation du canal (a) sond en rade de Brest. (a) Taux dinformation optimal en fonction
du rapport signal sur bruit, (b) vecteur dallocation de puissance optimal en fonction du
rapport signal sur bruit. =0 dB.
porteuses de celui de loptimisation du recul de puissance, nous avons compar le taux
dinformation obtenu lorsque et sont conjointement optimiss et lorsque seul est
optimis. Dans le dernier cas, la puissance alloue chaque sous-porteuse est uniforme
et de valeur 1/N. Pour tous les canaux tests, un schma doptimisation dallocation de
puissance sur les sous-porteuses napporte pas de gain signicatif. Celui-ci apporte un
gain faible SNR (de faon similaire une stratgie de waterlling), mais ce gain est plu-
tt marginal. Lallocation de puissance optimise sur les sous-porteuses paye seulement
si les densits de probabilit des sous-canaux frquentiels sont sufsamment diffrentes
lune de lautre, ce qui nest pas le cas sur les canaux tests. La gure 5.9 illustre ces rsul-
tats pour le canal (a) de la gure 5.7 ; canal qui, parmi notre base de donnes de canaux
rels, prsente la plus forte disparit entre les distributions de ses sous-canaux frquen-
tiels.
Pour mieux valuer le bnce apport par la connaissance des statistiques du canal
lmission, nous avons mesur les pertes sur le taux dinformation obtenues lorsque le
recul de puissance nest pas adapt aux conditions de propagation. Le but est ici de savoir
t
e
l
-
0
0
6
3
8
8
3
6
,
v
e
r
s
i
o
n
1
-
7
N
o
v
2
0
1
1
102 CHAPITRE 5. SUR LOPTIMISATION DU SCHMA DE SIGNALISATION
10 5 0 5 10 15 20 25 30
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
SNR
av
max
(dB)
P
e
r
t
e
s
u
r
l
e
t
a
u
x
d
i
n
f
.
P
bo
=0 dB
P
bo
=2 dB
P
bo
=4 dB
P
bo
=6 dB
Figure 5.10 Pertes sur le taux dinformation, normalise par le taux dinformation op-
timal, en fonction du rapport signal sur bruit et pour diffrentes valeurs de recul de puis-
sance. Pertes mesures sur le canal (b) sond au large de Marthas Vineyard.
si xer le recul de puissance indpendamment du SNR peut induire une diminution im-
portante du taux dinformation. La gure 5.10 montre cette perte normalise par le taux
dinformationoptimal pour le canal (b) sond aularge de Marthas Vineyard. Tout dabord,
on peut noter sur cette gure quil ny a pas de recul de puissance qui garantisse des per-
formances proches de loptimal pour une large gamme de SNR, ce qui met en vidence le
bnce de loptimisation. Cependant, si lenvironnement dans lequel le systme opre
est peu prs connu par le concepteur de systme et relativement stable, alors une op-
timisation adaptative en ligne nest pas forcment ncessaire. Dans certains cas, une
connaissance approche des statistiques du canal peut en effet tre fournie a priori par
le concepteur de systme plutt que par un lien de retour. Par exemple, sur la gure 5.10,
on observe quun recul de puissance de 4 dB garantit une perte sur le taux dinformation
infrieure 10%par rapport loptimal, et ce, pour un SNR compris entre 10 et 25 dB. Par
consquent, si le concepteur sait que dans la plupart des situations son systme va oprer
dans une telle gamme de SNR, alors le recul de puissance peut tre x hors ligne 4
dB, sans ncessit de lien de retour et sans impliquer une perte signicative de dbit.
Limitationen puissance crte et puissance moyenne
Pour les systmes aliments par des batteries oucontraints par la surchauffe des trans-
ducteurs, est gnralement suprieur 1. A la gure 5.11, nous analysons limpact de
de la contrainte sur le taux dinformation en utilisant le canal (a) sond ren rade de
Brest comme exemple. Le SNR moyen maximum est x 15 dB de sorte que
2
aug-
mente avec . La gure 5.11-(a) montre le prix payer en perte de taux dinformation du
fait de la contrainte sur la puissance crte. A mesure que augmente, la contrainte sur la
puissance crte devient moins restrictive, induisant un meilleur taux dinformation. Pour
un niveau de puissance moyenne transmise x, les systmes capables de supporter des
forts rapports de puissance crte sur puissance moyenne sont par consquent fortement
souhaitables. Ceci corrobore les rsultats obtenus dans le chapitre 4. On peut aussi obser-
t
e
l
-
0
0
6
3
8
8
3
6
,
v
e
r
s
i
o
n
1
-
7
N
o
v
2
0
1
1
5.2. OPTIMISATIONDE PUISSANCE 103
0 2 4 6 8 10 12 14 16 18 20
2.4
2.6
2.8
3
3.2
3.4
3.6
3.8
(dB)
R
(
b
i
t
s
/
u
t
i
l
i
s
a
t
i
o
n
d
u
c
a
n
a
l
)
Pertes dues la limitation
de puissance crte
(a)
0 2 4 6 8 10 12 14 16 18 20
0
2
4
6
8
10
12
14
16
18
20
(dB)
P
b
o
(
d
B
)
Recul de puissance optimal
Recul de puissance minimal
impos par le systme (P
bo
=)
SNR
av
max
=15 dB
(b)
Figure 5.11 (a) Taux dinformation optimal en fonction de . (b) Recul de puissance
optimal en fonction de . Canal (a) sond en rade de Brest, SNR
max
av
=15 dB.
ver sur la gure 5.11-(a) que lorsque atteint 8 dB, le taux dinformation R sature, ce qui
indique que les systmes avec une contrainte suprieure 8 dB sont quasiment qui-
valents des systmes sans contraintes sur la puissance crte. La gure 5.11-(b) montre,
quant elle, lvolution du recul de puissance optimal en fonction de . A mesure que
augmente, on observe que le recul de puissance P
bo
optimal tend vers . Ceci indique
que pour un rapport signal sur bruit donn et partir dun certain (4 dB dans notre
exemple), la meilleure stratgie consiste transmettre la puissance moyenne maximale
autorise.
Impact des mthodes de rduction de PAPR
Une des questions laquelle nous souhaiterions rpondre est de savoir si les m-
thodes de rduction de PAPR conues pour les systmes multi-porteuses sont bnques
t
e
l
-
0
0
6
3
8
8
3
6
,
v
e
r
s
i
o
n
1
-
7
N
o
v
2
0
1
1
104 CHAPITRE 5. SUR LOPTIMISATION DU SCHMA DE SIGNALISATION
24 8 16 32 64 128
0
1
2
3
4
5
6
7
Nombre des tons de contrle (N
c
)
d
B
Rduction de PAPR moyenne
Puissance moyenne alloue sur les tons de contrle
Gain moyen
Figure 5.12 Puissance moyenne alloue au tons de contrle hors bande et rduction
moyenne du PAPR en fonction du nombre de tons de contrle. Le gain moyen est dni
comme la moyenne du rapport entre la rduction du PAPR et la puissance consomme
par les tons de contrle. N =128.
du point de vue du taux dinformation. Le PAPR avant amplication est dni comme
PAPR=
max
0<tT
|z(t )|
2
1
T
_
T
0
E{|z(t )|
2
}dt
. .
=1
. (5.45)
Si lon arrive rduire ce PAPR effectif, il est alors possible de diminuer le phnomne
de distorsion rsultant de lcrtage du signal transmis par lamplicateur. Il existe de
nombreuses mthodes de rduction de PAPR dans la littrature, bases, par exemple, sur
lutilisation de mots de code particuliers, sur laltration de la phase des symboles trans-
mis ou sur lutilisation de tons de contrles [Han and Lee, 2005]. Rcemment, une m-
thode de rduction de PAPR spcialement adapte au contexte ASM a t propose dans
[Rojo and Stojanovic, 2010]. Cette technique est base sur linsertion de tons de contrles
dont les symboles sont optimiss an de limiter la puissance crte du signal global avant
amplication. Cette approche est particulire au contexte ASM car ces tons de contrle
sont insrs en dehors de la bande passante nominale du transducteur, et par cons-
quent, automatiquement ltrs lorsque le signal est transform enonde acoustique. Cette
mthode est communment appele la mthode OTI pour out-of-bandtone insertion.
Le point critique des mthodes de rduction de PAPR est quelles ne sont pas gra-
tuites. Elles requirent soit la transmission de pilotes supplmentaires qui rduisent le
dbit ou alors elles ont besoin de puissance supplmentaire pour rguler le PAPR. La
mthode OTI tombe dans la deuxime catgorie. Comme les tons de contrle sont en
dehors de la bande de transmission, ils naffectent pas lefcacit spectrale. Par contre,
ils consomment de la puissance. A titre dexemple, la gure 5.12 montre la puissance
moyenne alloue aux tons de contrle OTI ainsi que la rductionmoyenne de PAPR rsul-
tante en fonction du nombre N
c
de tons de contrle. Le systme OFDM est ici compos
t
e
l
-
0
0
6
3
8
8
3
6
,
v
e
r
s
i
o
n
1
-
7
N
o
v
2
0
1
1
5.2. OPTIMISATIONDE PUISSANCE 105
10 5 0 5 10 15 20 25 30
0
1
2
3
4
5
6
7
8
SNR
av
max
(dB)
R
(
b
i
t
s
/
u
t
i
l
i
s
a
t
i
o
n
d
u
c
a
n
a
l
)
N
c
=0
N
c
=8
N
c
=32
N
c
=128
= 0 dB
(a)
0 2 4 6 8 10 12 14 16 18 20
2.5
3
3.5
4
4.5
(dB)
R
(
b
i
t
s
/
u
t
i
l
i
s
a
t
i
o
n
d
u
c
a
n
a
l
)
N
c
=0
N
c
=8
N
c
=32
N
c
=128
Perte rsultante de la
puissance aditionnelle
ncessaire
pour rduire le PAPR
SNR
av
max
= 15 dB
(b)
Figure 5.13 Impact de la mthode de rduction de PAPR OTI sur le taux dinformation.
(a) Taux dinformation en fonction du rapport signal sur bruit, (b) taux dinformation en
fonction de . Canal (a) sond en rade de Brest.
de 128 sous-porteuses. Du point de vue du SNR ou du SNDR, la technique OTI offre des
avantages puisque la rductionde PAPRest toujours suprieure la puissance alloue aux
tons de contrle (i.e., le gain moyen est suprieur 0 dB). Par ailleurs, laugmentation du
nombre N
c
de tons de contrle implique une meilleure rduction de PAPR, mais nces-
site galement plus de puissance. Le problme est maintenant de savoir si cette mthode
a un rendement positif du point de vue du taux dinformation.
Pour ce faire, nous avons trac aux gures 5.13-(a) et (b) limpact de la mthode OTI
sur le taux dinformation en fonction respectivement du rapport signal sur bruit et de .
Le bnce de la rduction de PAPR est mitig. A faible SNR, la gure 5.13-(a) montre que
la puissance consomme par les tons de contrle est prdominante sur la rduction de
PAPR, rsultant ainsi en une perte du taux dinformation. La mthode OTI est seulement
bnque fort SNR o le recul de puissance est assez important (cf. g. 5.8-(b)). De plus,
comme montr la gure 5.13-(b), la rduction de PAPR est plutt contre-productive
pour les systmes avec un important. La puissance requise pour rduire le PAPR de-
t
e
l
-
0
0
6
3
8
8
3
6
,
v
e
r
s
i
o
n
1
-
7
N
o
v
2
0
1
1
106 CHAPITRE 5. SUR LOPTIMISATION DU SCHMA DE SIGNALISATION
vient un facteur limitant au regard du taux dinformation.
5.2.6 Directives de conception
Lanalyse numrique des stratgies doptimisation de puissance montre des rsultats
cohrents au travers des diffrents canaux tests
7
. Pour des canaux sous-tals, ces rsul-
tats fournissent des directives de conception qui peuvent tre rsumes comme suit :
Loptimisation de puissance peut apporter une amlioration signicative du taux
dinformationseulement pour les systmes qui sont principalement limits par leur
puissance crte et peu par leur puissance moyenne (i.e., avec un faible ).
Un schma optimis dallocationde puissance sur les sous-porteuses est seulement
bnque faible SNRet pour des canaux qui prsentent des statistiques trs dispa-
rates dun sous canal frquentiel lautre. Ce qui nest pas le cas des canaux tests.
Pour les systmes principalement limits par leur puissance crte (i.e., avec un
faible) et travaillant faible SNR, faire fonctionner lamplicateur proche de la zone
de saturation savre bnque, mme si cela introduit de la forte distorsion.
Pour les systmes principalement limits par leur puissance crte et travaillant
fort SNR (> 15 dB), limplmentation de techniques de rduction de PAPR semble
avantageux.
Pour les systmes principalement limits par leur puissance moyenne (i.e., avec
un suprieur 5 dB sur les canaux tests), les techniques de rduction de PAPR
peuvent tre contre-productives.
5.2.7 Cas des canaux sur-tals
Dans le cas des canaux sur-tals et plus gnralement lorsque lapproximation(5.35)
nest plus valable, loptimisation de la puissance de transmission va dpendre des capa-
cits de traitement supposes du rcepteur.
Absence de traitement de linterfrence la rception
Lorsque linterfrence nest pas exploite par le rcepteur, elle est considre comme
unbruit supplmentaire. Dans ce cas, le problme doptimisationde puissance est trs si-
milaire celui prsent pour les canaux sous-tals. En modlisant linterfrence comme
un bruit gaussien, la fonction de cot R, homogne au taux dinformation, peut en effet
scrire
R
1
TF
N1
n=0
E
h
k,n
_
log(1+SINDR(n))
_
, (5.46)
o SINDR(n) dnote le rapport signal sur interfrence plus bruit plus distorsion la sous-
porteuse n
SINDR(n) =
n
E
_
|d
k,n
|
2
_
+(
2
w
n
+
2
I
n
) /(
2
|h
k,n
|
2
)
. (5.47)
7. Les stratgies doptimisation ont aussi t testes sur des canaux mditerranens.
t
e
l
-
0
0
6
3
8
8
3
6
,
v
e
r
s
i
o
n
1
-
7
N
o
v
2
0
1
1
5.2. OPTIMISATIONDE PUISSANCE 107
o
2
I
n
est la puissance de linterfrence la sous-porteuse n. Cette puissance se calcule
comme dans lquation (5.17) mais en considrant cette fois-ci une rpartitionde la puis-
sance des donnes pas ncessairement homogne dune sous-porteuse lautre (i.e,
2
I
n
dpend du vecteur dallocation de puissance ).
Du fait de la similarit de formulation du problme doptimisation avec le cas sous-
tal, les directives de conception listes la section 5.2.6 sappliquent ici aussi. La dif-
frence principale entre les deux scnarios apparat sur le vecteur optimal qui nest
pas le mme suivant que lon considre linterfrence ou non.
2
I
n
dpend en effet de .
Cette diffrence na pas de grandes consquences sur les directives de conception suivre
puisque, comme indiqu la section 5.2.6, loptimisation de impacte peu le taux din-
formation.
Traitement de linterfrence la rception
Dans le cas dune transmission sur un canal sur-tal avec un rcepteur capable dex-
ploiter linformation reue sous forme dinterfrence, loptimisation de puissance se r-
vle beaucoup plus ardue. Les donnes observes doivent en effet se traiter dans leur
globalit et non plus sous-porteuse par sous-porteuse. De ce fait, en plus de loptimisa-
tion du recul de puissance, on ne doit plus uniquement optimiser la puissance alloue
sur chaque sous-porteuse mais la matrice de covariance des donnes. Si lon reprend la
formulationmatricielle de lquation (5.26) et que lon intgre la possible distorsiondue
la contrainte sur la puissance crte, lentre et la sortie du canal de transmission vrient
y
W H
= H
W H
(x
W H
+d
W H
) +w
W H
, (5.48)
o d
W H
est le vecteur distorsion de taille KN 1. Dans ce cas, la fonction de cot repr-
sentant le taux dinformation scrit
R
1
TF K
E
H
W H
_
logdet
_
H
W H
_
R
x
W H
+R
d
W H
_
H
W H
+R
w
W H
_
logdet
_
H
W H
R
d
W H
H
W H
_
logdet
_
R
w
W H
_
_
,
(5.49)
o R
x
W H
et R
d
W H
sont respectivement les matrices de covariance des donnes et de la dis-
torsion, toutes deux de dimensionKNKN. Le problme consiste alors trouver R
x
W H
et
P
bo
qui maximisent R sous les mmes contraintes que celles donnes lquation (5.39).
Ce problme reste ouvert et na pas t rsolu dans le cadre de cette thse. La dif-
cult du problme vient de la dimension des matrices optimiser et de la dpendance
entre R
x
W H
et R
d
W H
. Un manire daborder le problme serait de considrer des cas par-
ticuliers de ce problme trs gnral. Par exemple, si lon considre que g(t ) et (t ) sont
choisies de faon ce quil ny ait pas dinterfrence entre symboles, alors il faut juste trai-
ter linterfrence entre sous-porteuses et la dimension du problme passe de KN KN
N N. De la mme manire, le problme se simplie pour les cas o la contrainte sur
la puissance moyenne est forte (i.e., grand), la distorsion peut tre nglige et le pro-
blme consiste alors trouver R
x
W H
uniquement. Pour ce cas particulier et en suppo-
sant un canal de Rayleigh, la structure optimale de R
x
W H
est connue et est donne dans
[Taubck and Hlawatsch, 2007].
t
e
l
-
0
0
6
3
8
8
3
6
,
v
e
r
s
i
o
n
1
-
7
N
o
v
2
0
1
1
t
e
l
-
0
0
6
3
8
8
3
6
,
v
e
r
s
i
o
n
1
-
7
N
o
v
2
0
1
1
Conclusion
Ltude mene dans le chapitre 4 nous a permis didentier des nouvelles bornes sur
la capacit non-cohrente des canaux ASM SISO, modliss ici comme des canaux de
Rice doublement dispersifs. An de reter les contraintes imposes par le matriel lec-
tronique et acoustique sur le signal transmis, nous avons considr des puissances crte
et moyenne nies. Les effets dune puissance crte limite et dune conguration non-
cohrente ont t quantis au travers, respectivement, dune perte sur le rapport signal
sur bruit moyen et dun terme de pnalit fonction du spectre Doppler du canal.
Les valuations numriques ont montr que pour des systmes de transmission fai-
blement contraints en puissance crte (rapport puissance crte sur puissance moyenne
minimum suprieur 8 dB), le terme de pnalit reste faible et la conguration non-
cohrente nimplique pas de perte signicative sur la capacit comparativement au
contexte cohrent.
En appliquant les bornes de capacit sur un canal ASM rel, nous avons montr que
dans des environnements petit-fondtypiques (fort facteur de Rice, facteur dtalement de
lordre de 10
2
), il est thoriquement possible de doubler, voire tripler, les dbits de trans-
mission par rapport aux modems haut-dbit commercialiss actuellement qui oprent
autour de 1 bit/s/Hz.
Dans le but ensuite de trouver le bon compromis entre robustesse et efcacit spec-
trale des systmes de transmission ASM, nous nous sommes intress, au chapitre 5, aux
schmas de signalisation multi-porteuses de type Weyl-Heisenberg. Ces schmas mul-
tiplexent linformation dans le domaine temps-frquence offrant ainsi la possiblit de
sadapter au caractre doublement dispersif du canal ASM. Au travers du choix des fonc-
tions prototypes et de la grille temps-frquence qui caractrisent les schmas de Weyl-
Heisenberg, nous avons discut de la possibilit doptimiser la puissance de linterfrence
observe la rception, favorisant ainsi la robustesse du systme, et/ou de la possibilit
dutiliser au maximumles degrs de libert offerts par le canal, favorisant alors lefcacit
spectrale.
Dans un deuxime temps, nous avons tudi des techniques doptimisation de puis-
sance favorables au taux dinformation. Ces techniques reposent sur la connaissance des
statistiques du canal lmission. Nous avons considr loptimisation de la puissance
alloue sur chaque sous-porteuse en fonction de la slectivit frquentielle du canal, tout
en intgrant les contraintes de puissance crte et moyenne nies imposes par les am-
plicateurs et/ou les transducteurs acoustiques. La limitation de la puissance crte est
t
e
l
-
0
0
6
3
8
8
3
6
,
v
e
r
s
i
o
n
1
-
7
N
o
v
2
0
1
1
110 CONCLUSION
connue pour avoir un impact notable sur les performances des systmes multi-porteuses
du fait de la dynamique temporelle importante de leur forme donde. Les zones de li-
narit des amplicateurs ou des transducteurs tant limites, le compromis entre faire
fonctionner lmetteur en rgime linaire ou satur a t analys. Loptimisation de puis-
sance a ainsi t ralis conjointement sur la puissance alloue aux sous-porteuses et sur
le recul de puissance moyenne contraint par la limitation en puissance crte. Limpact de
mthodes de rduction du PAPR sur le taux dinformation a galement t tudi.
Pour les canaux dits sous-tals, nous avons montr que loptimisation de puissance
est bnque uniquement pour les systmes fortement contraints par leur puissance
crte et peu par leur puissance moyenne. Lamlioration du taux dinformation appor-
te par loptimisation de la puissance alloue sur chaque sous-porteuse est marginale
lorsque la connaissance du canal lmission est limite aux statistiques. Enn, pour les
systmes fortement contraints par leur puissance crte, faire fonctionner les amplica-
teurs proches de la saturation savre bnque faible SNR et implmenter des m-
thodes de rduction de PAPR est surtout avantageux fort SNR.
t
e
l
-
0
0
6
3
8
8
3
6
,
v
e
r
s
i
o
n
1
-
7
N
o
v
2
0
1
1
Conclusion gnrale et
perspectives
Synthse des contributions
Tout au long de ce manuscrit, nous nous sommes attach caractriser le ca-
nal de communication acoustique sous-marin an de proposer des outils de concep-
tion/validation de modems et didentier les schmas de signalisation adapts la struc-
ture de ce canal. Dans un premier temps, nous nous sommes intress la modlisation
statistique des canaux ASM dispersifs en temps et frquence en exploitant diffrents de-
grs dinformation a priori sur le milieu modliser. Dans la seconde partie, nous avons
cherch connatre les limites thoriques de dbit de communication quil est possible
datteindre en ASM et avons propos des directives de conception des schmas de signa-
lisation qui permettent doptimiser les ressources offertes par le milieu de propagation.
Plus prcisment, les principales contributions de ce travail de thse sont les sui-
vantes :
En exploitant le principe dentropie maximale, nous avons montr au chapitre 2
quil tait possible de construire un modle paramtrique du canal de communica-
tion ASM qui soit
1. cohrent-le modle ne repose que sur une connaissance objective de lenvi-
ronnement modliser,
2. concis-relativement peu de paramtres sont ncessaires pour caractriser as-
sez prcisment le canal doublement dispersif (sous lhypothse de stationna-
rit au sens large de celui-ci),
3. ouvert-le modle est volutif et peut tre mis jour chaque fois quune nou-
velle information sur lenvironnement modliser est disponible.
Ce modle prsente galement lavantage dautoriser lutilisation de paramtres
dentre dits incertains dont les valeurs numriques ne sont pas connues exacte-
ment. Le recours ces paramtres savre trs pertinent lorsque lon est seulement
en mesure de borner notre connaissance sur le canal.
En analysant des donnes recueillies dans locan Atlantique et la mer Mditer-
rane, nous avons montr au chapitre 3 que les canaux de transmission ASM
t
e
l
-
0
0
6
3
8
8
3
6
,
v
e
r
s
i
o
n
1
-
7
N
o
v
2
0
1
1
112 CONCLUSION GNRALE ET PERSPECTIVES
pouvaient tre modliss par des processus alatoires stationnaires en tendance.
Ce modle est plus gnral que lhypothse habituelle de stationnarit au sens
large et convient particulirement aux canaux avec des metteurs/rcepteurs en
mouvement. De plus, dans ce chapitre 3, nous avons propos un modle de rejeu
stochastique qui permet de reproduire de faon able la ralit physique du milieu
ASM en intgrant notamment la corrlation potentielle entre trajets.
En considrant un maximum de contraintes ralistes, nous avons propos au
chapitre 4 de nouvelles bornes de capacit du canal ASM. Le canal a t suppos
doublement dispersif, les puissances crtes et moyennes limites et la ralisation
courante du canal inconnue de lmetteur et du rcepteur (contexte non-cohrent).
Nous avons montr dans ce chapitre que la mise en uvre de systmes de com-
munication offrant une efcacit spectrale deux ou trois fois suprieure ltat de
lart apparaissait comme un objectif raisonnable pour les canaux ASM petit-fond
typiques avec un SNR de 15 20 dB. De plus, pour une puissance moyenne de
transmission xe, il a galement t montr que des systmes autorisant des
rapports puissance crte sur puissance moyenne importants taient fortement
souhaitables.
Dans le but de trouver le bon compromis entre robustesse et efcacit spectrale,
nous avons discut au chapitre 5 de loptimisation des schmas de signalisation
multi-porteuses de type Weyl-Heisenberg. Nous avons propos une mthode dana-
lyse de linuence des fonctions prototypes et de la grille temps-frquence sur lin-
terfrence observe la rception et sur lefcacit spectrale. De plus, nous avons
identi des techniques doptimisation de puissance favorables au taux dinforma-
tion. Plus particulirement, pour les canaux dits sous-tals, nous avons montr
que :
1. loptimisation de puissance est bnque uniquement pour les systmes for-
tement contraints par leur puissance crte et peu par leur puissance moyenne,
2. lamlioration du taux dinformation apporte par loptimisation de la puis-
sance alloue sur chaque sous-porteuse est marginale lorsque la connaissance
du canal lmission est limite aux statistiques,
3. pour les systmes fortement contraints par leur puissance crte, faire fonction-
ner les amplicateurs proches de la saturation savre bnque faible SNR
et implmenter des mthodes de rduction de PAPR est surtout avantageux
fort SNR.
Perspectives
Les travaux initis lors de la thse permettent denvisager les perspectives suivantes :
Les modles de canaux proposs aux chapitre 2 et 3 se focalisent essentiellement
sur les uctuations rapides du canal ASM. An de complter ces modles, il serait
intressant dajouter les uctuations lentes de ce canal. Mme si elles sont moins
t
e
l
-
0
0
6
3
8
8
3
6
,
v
e
r
s
i
o
n
1
-
7
N
o
v
2
0
1
1
CONCLUSION GNRALE ET PERSPECTIVES 113
critiques pour les systmes de communication que les uctuations rapides, elles
peuvent impacter la conception de systmes qui transmettent sur de longues p-
riodes et qui ont la capacit de sadapter (au travers de leur puissance notamment)
aux variations lentes de lenvironnement. Une caractrisation des uctuations
lentes permettrait dtendre le modle entropie maximale aux canaux non sta-
tionnaires au sens large et permettrait galement dappliquer la mthode du rejeu
stochastique sur des dures suprieures la dure de la rponse impulsionnelle
initialement observe. Ces uctuations lentes ne peuvent tre caractrises que
si des campagnes de sondage de canaux rels sont ralises sur de longues priodes.
Dans un contexte o des efforts mergent de la communaut de recherche en ASM
pour proposer des protocoles de communication standardiss, il serait pertinent
de mutualiser, au niveau international, les bases de donnes de canaux sonds en
mer. A partir de cette base et laide de techniques de rejeu stochastique comme
celle que nous avons propose ou celle prsente dans [van Walree et al., 2008], il
serait alors possible de comparer de faon objective des techniques de transmission
concurrentes.
Au chapitre 4, nous avons exprim les bornes de capacit en fonction du rapport
signal sur bruit. Pour tre plus facilement exploitables, il serait judicieux de coupler
ces bornes avec un modle de propagation physique qui exprime le rapport
signal sur bruit en fonction de la distance entre lmetteur et le rcepteur et des
caractristiques de la chane de transmission (puissances crte et moyenne en dB
re Pa @ 1 m, largeur de bande disponible etc.). Pour une puissance dmission
et une distance xes, ce couplage avec un modle physique pourrait aussi nous
permettre didentier la bande et la frquence optimales de transmissionqui maxi-
miseraient le dbit dinformation. De plus, dans notre travail sur la capacit, nous
avons contraint les donnes transmises tre i.i.d an de faciliter les calculs. Pour
dterminer la capacit au sens strict du terme, il faudrait relcher cette contrainte.
En lien avec les perspectives sur la modlisation de canaux, il serait aussi intres-
sant dintgrer les uctuations lentes du canal pour pouvoir dterminer la capacit
en terme de probabilit de coupure ( outage capacity ), ce type de mtrique tant
plus pertinent que la capacit ergodique pour les systmes qui transmettent en
continu sur de longues priodes. Enn, lorsque les infrastructures le permettent,
lutilisationde plusieurs transducteurs lmission et dhydrophones la rception
savre favorable laugmentation du dbit. Il conviendrait donc dtendre ces
travaux de capacit non-cohrente et limite en puissance crte aux canaux MIMO.
La question doptimisation du schma de signalisation voque au chapitre 5
reste trs ouverte. Nous avons travaill sur des schmas multi-porteuses de Weyl-
Heisenberg car ceux-ci nous semblent adapts au caractre doublement dispersif
du canal mais rien ne garantit quils soient optimaux au regard de la capacit
du canal. Dans notre effort doptimisation de ces schmas de Weyl-Heisenberg,
nous avons dissoci les diffrents paramtres (fonctions prototypes, grille TF et
puissance) qui inuent sur leurs performances. Idalement, il faudrait raliser
loptimisation de faon conjointe car ces paramtres sont fortement dpendants
t
e
l
-
0
0
6
3
8
8
3
6
,
v
e
r
s
i
o
n
1
-
7
N
o
v
2
0
1
1
114 CONCLUSION GNRALE ET PERSPECTIVES
les uns des autres. De plus, dans ce chapitre 5 nous avons suppos la distribution
du canal connue lmission, dans la pratique cette information peut se trouver
quantie ou partielle. Ainsi, il serait intressant dtudier limpact du degr
de connaissance des statistiques (seuls quelques moments connus, grandeurs
quanties etc.) du canal lmission sur les choix doptimisation.
En parallle des travaux prsents dans ce manuscrit, quelques mois de la thse
ont t ddis limplmentation et la validation en mer dune chane complte de
transmission multi-porteuse de type OFDM avec des fonctions prototypes rectan-
gulaires. Il conviendrait damliorer cette chane de transmission en optimisant les
fonctions prototypes, la puissance mise et les traitements de rception au regard
des lments prsents dans le chapitre 5.
t
e
l
-
0
0
6
3
8
8
3
6
,
v
e
r
s
i
o
n
1
-
7
N
o
v
2
0
1
1
Publications
Les travaux de recherche mens durant ces trois annes de thse sur les communica-
tions acoustiques sous-marines ont donn lieu des publications qui sont rfrences ci-
dessous. La liste complte des publications de lauteur, intgrant les publications sur des
sujets autres que ceux relatifs aux communications acoustiques, est disponible ladresse
http ://perso.telecom-bretagne.eu/fxsocheleau/Publications/
Articles de journaux
J.-M. Passerieux, F.-X. Socheleau, C. Laot, "Achievable Rates over Doubly Selective
Rician-Fading Channels under Peak-Power Constraint", soumis IEEE Trans.
Wireless Commun., Oct. 2011
F.-X. Socheleau, C. Laot, and J.-M. Passerieux, "Stochastic Replay of Non-WSSUS
Underwater Acoustic Communication Channels Recorded at Sea", IEEE Trans.
Signal Process., vol. 59, No. 10, pp. 4838-4849, 2011
F.-X. Socheleau, C. Laot, J.-M. Passerieux, "Concise Derivation of Scattering Func-
tion from Channel Entropy Maximization", IEEE Trans. Commun., vol. 58, n11, pp.
3098-3103, Novembre 2010
Articles de confrences
F.-X. Socheleau, J.-M. Passerieux, C. Laot, "Le canal de communication acoustique
sous-marin : point de vue de la thorie de linformation", XXIII colloque GRETSI,
Septembre 2011
J.-M. Passerieux, F.-X. Socheleau, X. Cristol, "High Fidelity Simulation Tools for
Performance Assessment of Underwater Acoustic Communications Modems",
Maritime Systems and Technology, Juin 2011
F.-X. Socheleau, J.-M. Passerieux, C. Laot, "Acoustic Modem Performance Assess-
ment via Stochastic Replay of at Sea Recordedunderwater Acoustic Communication
Channels", Underwater Acoustic Measurements, Juin 2011
t
e
l
-
0
0
6
3
8
8
3
6
,
v
e
r
s
i
o
n
1
-
7
N
o
v
2
0
1
1
116 PUBLICATIONS
J.-M. Passerieux, F.-X. Socheleau, C. Laot, "On the capacity of the Underwater
Acoustic Communication Channel under Realistic Assumptions", IEEE European
Wireless, Mai 2011
J.-M. Passerieux, F.-X. Socheleau, C. Laot, "Shallow Water Acoustic Communi-
cations : How Far are we from the Channel Capacity ?", European Conference on
Underwater Acoustics, Juillet 2010
F.-X. Socheleau, C. Laot, J.-M. Passerieux, "A Maximum Entropy Framework for
Statistical Modeling of Underwater Acoustic Communication Channels", IEEE
OCEANS10 Conf, Juin 2010
F.-X. Socheleau, J.-M. Passerieux, C. Laot, "Characterisation of time-varying un-
derwater acoustic communication channel with application to channel capacity",
Underwater Acoustic Measurements, Juin 2009
t
e
l
-
0
0
6
3
8
8
3
6
,
v
e
r
s
i
o
n
1
-
7
N
o
v
2
0
1
1
Bibliographie
A. Abdi, C. Tepedelenlioglu, M. Kaveh, and G. Giannakis. On the Estimation of the K Para-
meter for the Rice Fading Distribution. IEEE Commun. lett., 5(3), 2001.
H. Artes, G. Matz, and F. Hlawatsch. Unbiased Scattering FunctionEstimators for Unders-
pread Channels and Extension to Data-Driven Operation. IEEE Trans. Signal Process.,
52(5) :254264, 2004.
A. B. Baggeroer. Acoustic Telemetry-An Overview. IEEE J. Ocean. Eng., 9(4), 1984.
A. R. S. Bahai, M. Singh, A. J. Goldsmith, and B. R. Saltzberg. A New Approach for Evalua-
ting Clipping Distortion in Multicarrier Systems. IEEE J. Select. Areas Commun., 20(05) :
10371045, 2002.
P. Banelli and S. Cacopardi. Theoretical Analysis and Performance of OFDM Signals in
Nonlinear AWGN Channels. IEEE Trans. Commun., 48(03) :430441, 2000.
P. Bello. Some Techniques for the Instantaneous Real-Time Measurement of Multipath
and Doppler Spread. IEEE Trans. Commun. Tech., 13(3) :285292, 1965.
P. A. Bello. Characterization of randomly time-variant linear channels. IEEE Trans. Com-
mun. Systems, 11(4) :360393, 1963.
C. R. Berger, S. Zhou, J. C. Preisig, and Peter Willett. Sparse Channel Estimation for Multi-
carrier Underwater Acoustic Communication: FromSubspace Methods to Compressed
Sensing. IEEE Trans. Signal Process., 58(3) :1708 1721, 2010.
E. Biglieri, J.G. Proakis, and S. Shamai (Shitz). Fading channels : Information-theoretic
and communication aspects. IEEE Trans. Inf. Theory, 44 :26192692, 1998.
C. Bjerrum-Niese and R. Ltzen. Stochastic Simulation of Acoustic Communication in
Turbulent ShallowWater. IEEE J. Ocean. Eng., 25(4), 2000.
J.F. Bonnans, J.Ch. Gilbert, C. Lemarchal, and C.A. Sagastizbal. Numerical Optimiza-
tion : Theoretical and Practical Aspects. Springer, 2006.
L. M. Brekhovskikh and Yu P. Lysanov. Fundamentals of Ocean Acoustics. Springer-Verlag,
1991.
t
e
l
-
0
0
6
3
8
8
3
6
,
v
e
r
s
i
o
n
1
-
7
N
o
v
2
0
1
1
118 BIBLIOGRAPHIE
M. J. Buckingham. Ocean-acoustic propagation models. Journal dacoustique, 5(3) :223
287, 1992.
J. P. Burg. Maximum Entropy Spectral Analysis. PhD thesis, Department of Geophysics,
Stanford University, 1975.
S.-H. Byun, S.-M Kim, Y.-K. Lim, and W Seong. Time-varying Underwater Acoustic Chan-
nel Modeling for Moving Platform. In Proc. IEEE Oceans Conf., Sep. 2007.
L. Chen and C. W. Letchford. Simulation of Multivariate Stationary Gaussian Stochastic
Processes : Hybrid Spectral Representation and Proper Orthogonal Decomposition Ap-
proach. Journal of Engineering Mechanics, 131(8) :801808, 2005.
M. Chitre. A high-frequency warm shallow water acoustic communications channel mo-
del and measurements. J. Acoust. Soc. Am., 122(1), 2007.
P. S. Chow, J. M. Ciof, and J. A. C. Bingham. Practical discrete multitone transceiver loa-
ding algorithmfor data transmissionover spectrally shapedchannels. IEEETrans. Com-
mun., 43(2-4) :773775, 1995.
O. Christensen. An Introduction to Frames and Riesz Bases. Birkhuser, Boston, MA, USA,
2003.
C.S. Clay and H. Medwin. Acoustical Oceanography, principles and applications. Wiley-
Interscience, 1977.
R. Coates. Underwater acoustic communications. In Proc. IEEE Oceans Conf., Oct. 1993.
T. Cover and J. Thomas. Elements of Information Theory. Wiley, 1991.
R. T. Cox. Probability, frequency and reasonable expectation. American Journal of Physics,
14(1) :113, 1946.
X. Cristol. NARCISSUS-2005 : A Global Model of Fading Channel for Applicationto Acous-
tic Communicationin Marine Environment. In Proc. IEEEOceans Conf., pages 655662,
Brest, Jun. 2005.
X. Cristol and J.M. Passerieux. Caractrisation exprimentale et modlisation physique
des uctuations temporelles du canal acoustique sous-marin. In Proc. Journes scienti-
ques 2009 dURSI-France, Mar. 2009.
M. Debbah and R. R. Mller. MIMO Channel Modeling and the Principle of Maximum
Entropy. IEEE Trans. Inf. Theory, 51(5) :16671690, 2005.
X. Deng and A. Haimovich. Information rates of time varying rayleigh fading channels. In
Proc. IEEE Int. Conf. on Communications (ICC), Jun. 2004.
G. Deodatis. Simulation of Ergodic Multivariate Stochastic Processes. Journal of Enginee-
ring Mechanics, 122(8) :778787, 1996.
J. Dieudonn. Elments danalyse, vol. 1. Gauthier-Villars, Paris, 1965.
t
e
l
-
0
0
6
3
8
8
3
6
,
v
e
r
s
i
o
n
1
-
7
N
o
v
2
0
1
1
BIBLIOGRAPHIE 119
A. M. Djafari. A Matlab Program to Calculate the Maximum Entropy Distributions.
http://djafari.free.fr/pdf/me91_1.pdf.
M.C. Domingo. Overviewof channel models for underwater wireless communicationnet-
works. Physical Communication, 1(3) :163 182, 2008.
G. Durisi, U.G. Schuster, H. Blcskei, and S. Shamai (Shitz). Noncoherent capacity of un-
derspread fading channels. IEEE Trans. Inf. Theory, 56(1), 2010.
A. Essebbar, G. Loubet, and F. Vial. Underwater Acoustic Channel Simulations for Com-
munication. In Proc. IEEE Oceans Conf., Sep. 1994.
P.C. Etter. Underwater Acoustic Modeling and Simulation, 3rd ed. Spon Press, 2003.
G. Eynard and C. Laot. Blind Doppler Compensation Techniques for single Carrier Digital
Underwater Communications. In Proc. IEEE Oceans Conf., Sep. 2008.
P. Fan and M. Darnell. Sequence Design for communications applications. Research Stu-
dies Press Ltd, 1996.
I.C. Abou Faycal, M.D. Trott, and S. Shamai (Shitz). The Capacity of Discrete-Time Memo-
ryless Rayleigh Fading Channels. IEEE Trans. Inf. Theory, 47(4) :12901301, 2001.
B. Le Floch, M. Alard, and C. Berrou. Coded orthogonal frequency-division multiplex.
Proc. IEEE, 83, June 1995.
F. Frassati, C. Lafon, P.A. Laurent, and J.M. Passerieux. Experimental assessment of OFDM
and DSSS modulatins for use in littoral waters underwater acoustic communications.
In Proc. IEEE Oceans05, Jun. 2005.
R.G. Gallager. Information Theory and Reliable Communication. Wiley, 1968.
R. Galvin and R.E.W. Coats. A stochastic underwater acoustic channel model. In Proc.
IEEE Oceans Conf., Sep. 1996.
X. Geng and A. Zielinski. An eigenpathunderwater acoustic communicationchannel mo-
del. In Proc. IEEE Oceans Conf., Oct. 1995.
A. Goalic, J. Trubuil, and N. Beuzelin. Long Range Real-Time Underwater Acoustic Com-
munication at Low Bit Rate with Channel Coding protection. In IEEE Military Commu-
nications Conference, Nov. 2008a.
A. Goalic, J. Trubuil, and N. Beuzelin. Long range underwater acoustic communication
using melp speech coder with channel coding protection. In Proc. IEEE MILCOM08,
Nov. 2008b.
A. Goldsmith. Wireless Communications. Cambridge University Press, 2005.
J.P. Gomes andM. Stojanovic. Performance Analysis of FilteredMultitone ModulationSys-
tems for Underwater Communication. In Proc. IEEE Oceans09 Conference, Oct. 2009.
R.M. Gray. Toeplitz and Circulant Matrices : A review. NOW Publisher Inc., Hanover, 2006.
t
e
l
-
0
0
6
3
8
8
3
6
,
v
e
r
s
i
o
n
1
-
7
N
o
v
2
0
1
1
120 BIBLIOGRAPHIE
K. Grchenig. Foundations of Time-Frequency Analysis. Birkhuser, Boston, MA, USA,
2001.
M. Guillaud, M. Debbah, and A. L. Moustakas. A Maximum Entropy Characterization of
Spatially Correlated MIMOWireless Channels. In Proc. IEEE Wireless Communications
and Networking Conference, Mar. 2007.
M. Gursoy, H.V. Poor, and S. Verd. The noncoherent Rician fading channel Part I : Struc-
ture of the capacity-achieving input. IEEE Trans. Wireless Commun, 4(5), September
2005.
R. Haas and J. C. Belore. A Time-Frequency Well-localized Pulse for Multiple Carrier
Transmission. Wireless Personal Communications, 5 :118, 1997.
S.H. Han and J.H. Lee. An overview of peak-to-average power ratio reduction techniques
for multicarrier transmission. IEEE Wireless Commun., 12(2) :5665, 2005.
T. Hayward and T.C. Yang. Underwater acoustic communication channel capacity : A
simulation study. In Proceeding of AIP Conference, pages 114121, Nov. 2004.
F. Hlawatsch and G. Matz. Wireless Communications Over Rapidly Time-Varying Chan-
nels. Elsevier, 2011.
J. Holtzman and A. Sampath. Adaptive Averaging Methodology for Handoffs in Cellular
Systems. IEEE Trans. Veh. Technol., 44(1), 1995.
J. Huang, S. Zhou, and P. Willett. Nonbinary LDPC Coding for Multicarrier Underwater
Acoustic Communication. IEEE J. Sel. Areas Commun., 26(9) :1684 1696, 2008.
N. E. Huang, Z. Shen, S. R. Long, M.L. Wu, H. H. Shih, Q. Zheng, N. C. Yen, C. C. Tung, and
H. H. Liu. The empirical mode decomposition and Hilbert spectrumfor nonlinear and
nonstationary time series analysis. Proc. R. Soc. London A, 454 :903995, 1998.
X. Huang. Capacity criterion-based power loading for underwater acoustic OFDM sys-
tem with limited feedback. In Proc. of IEEE Wireless Communications, Networking and
Information Security, Jun. 2010.
S.-J. Hwang and P. Schniter. Efcient Multicarrier Communication for Highly Spread Un-
derwater Acoustic Channels. IEEE J. Sel. Areas Commun., 26(9), 2009.
E. T. Jaynes. Probability Theory : The Logic of Science. Cambridge Univ. Press, 2003.
E.T. Jaynes. Information Theory and Statistical Mechanics. Physical review, 106(4) :620
630, 1957.
E.T. Jaynes. On The Rationale of Maximum Entropy Methods. Proc. Of the IEEE, 70(9) :
939952, 1982.
P. Juhel. Histoire de lacoustique sous-marine. Vuibert, 2005.
D. B. Kilfoyle and A. B. Baggeroer. The State of the Art in Underwater Acoustic Telemetry.
IEEE J. Ocean. Eng., 25(1), 2000.
t
e
l
-
0
0
6
3
8
8
3
6
,
v
e
r
s
i
o
n
1
-
7
N
o
v
2
0
1
1
BIBLIOGRAPHIE 121
W. Kozek. Matched Weyl-Heisenberg Expansions of Nonstationary Environments. PhD
thesis, Dept. Elec. Eng., Vienna Univ. Technol., Vienna, Austria, 1997.
W. Kozek and A. F. Molisch. Nonorthogonal pulseshapes for multicarrier communications
in doubly dispersive channels. IEEE J. Select. Areas Commun., 16(8), 1998.
C. Laot, N. Beuzeulin, and Arnaud Bourre. Experimental results on MMSE turbo equali-
zation in underwater acoustic communication using high order modulation. In Proc.
IEEE Oceans10, Sep. 2010.
G. Leus and P. A. van Walree. Multiband OFDM for Covert Acoustic Communications.
IEEE J. Sel. Areas Commun., 26(9), 2009.
B. Li, S. Zhou, M. Stojanovic, L. Freitag, and P. Willett. Multicarrier Communication Over
Underwater Acoustic Channels With Nonuniform Doppler Shifts. IEEE J. Ocean. Eng,
33(2), 2008.
B. Li, J. Huang, S. Zhou, K. Ball, M. Stojanovic, L. Freitag, and P. Willett. MIMO-OFDM for
High Rate Underwater Acoustic Communications. IEEE J. Ocean. Eng., 34(4) :634 645,
2009.
K. Liu, T. Kadous, and A. M. Sayeed. Orthogonal Time-Frequency Signaling over Doubly
Dispersive Channels. IEEE Trans. Inf. Theory, 50(11), 2004.
D. Lucani, M. Medard, and M. Stojanovic. On the relationship between transmission po-
wer and capacity of an underwater acoustic communication channel. In Proc. IEEE
Oceans 08 Conference, Kobe, Japan, Apr. 2008.
X. Lurton. An introduction to underwater acoustics : principles and applications. Springer,
2011.
S.F. Mason, C. R. Berger, S. Zhou, and P. Willett. Synchronization and Doppler Scale Esti-
mation with Multicarrier Waveforms in Underwater Acoustic Communication. IEEE J.
Sel. Areas Commun, 26(9), 2008.
S.R. Massel. Ocean Surface Waves : Their Physics and Prediction. World Scientic Pub Co
Inc, Hanover, 1996.
G. Matz, D. Schafhuber, K. Grchenig, M. Hartmann, and F. Hlawatsch. Analysis, Optimi-
zation, and Implementation of Low-Interference Wireless Multicarrier Systems. IEEE
Trans. on Wireless Commun., 6(5), 2007.
J. Max and J.-L. Lacoume. Mthodes et techniques de traitement du signal. Dunod, 2004.
M. Medard. The effect upon channel capacity in wireless communications of perfect and
imperfect knowledge of the channel. IEEE Trans. Inf. Theory, 46(3), May 2000.
H. Ochiai. Performance Analysis of Peak Power and Band-Limited OFDM System With
Linear Scaling. IEEE Trans. Wireless Commun., 2(5), Sep. 2003.
t
e
l
-
0
0
6
3
8
8
3
6
,
v
e
r
s
i
o
n
1
-
7
N
o
v
2
0
1
1
122 BIBLIOGRAPHIE
H. Ochiai and H. Imai. Performance Analysis of Deliberately Clipped OFDMSignals. IEEE
Trans. Commun., 50(1), Jan. 2002.
N. Ophir, J. Tabrikian, and H. Messer. Capacity Analysis of Ocean Channels. In Proc. of
IEEE Workshop on Sensor Array and Multichannel Processing, Jul. 2006.
R. Otnes and T.H. Eggen. Underwater Acoustic Communications : Long-Term Test of
Turbo Equalization in ShallowWater. IEEE J. Ocean. Eng., 33(3) :321334, 2008.
R. Otnes, T. Jenserud, J.E. Voldhaug, and C. Soldberg. A Roadmap to Ubiquitous Under-
water Acoustic Communications and Networking. In Proc. Underwater Acoustic Mea-
surement : Technologies and Results, Jun. 2009.
. Oyman, R. U. Nabar, H. Blcskei, and A. J. Paulraj. Tight lower bounds on the ergodic
capacity of Rayleigh fading MIMOchannels. In Proc. IEEE Globecom, Nov. 2002.
N. Papandreou and T. Antonakopoulos. Bit and power Allocation in Constrained Multi-
carrier Systems : the Single-User Case. Eurasip J. on Avd. in Sig. Proc., 2008, 2008.
J.-M. Passerieux, F.-X. Socheleau, and C. Laot. On the capacity of the Underwater Acous-
tic Communication Channel under Realistic Assumptions,. In in Proc. IEEE European
Wireless, Apr. 2011.
M. B. Porter and H. P. Bucker. Gaussian beamtracing for computing ocean acoustic elds.
J. Acoust. Soc. Am., 82 :13491359, 1987.
J.G. Proakis. Digital Communications. McGraw-Hill, 2001.
P. Qarabaqi and M. Stojanovic. Statistical Modeling of a Shallow Water Acoustic Commu-
nicationChannel. In Underwater Acoustic Measurement : Technologies and Results, Jun.
2009.
F. Qu and L. Yang. Basis Expansion Model for Underwater Acoustic Channels. In Proc.
IEEE Oceans Conf., Sep. 2008.
O. Rabaste. Estimation de canaux multitrajets. Application la Tomographie Acoustique
Ocanique active discrte. PhD thesis, SC - Dpt. Signal et Communications (Institut
Tlcom-TlcomBretagne), UR1 - Universit de Rennes 1, 2006.
A. Radosevic, J. G. Proakis, and M. Stojanovic. Statistical Characterizationand Capacity of
ShallowWater Acoustic Channels. In Proc. IEEE Oceans Conf., May 2009.
R. Raich, H. Qian, and G.T. Zhou. Optimization of SNDR for Amplitude-Limited Nonli-
nearities. IEEE Trans. Commun., 53(11) :19641972, 2005.
N. Rehman and D.P. Mandic. Empirical Mode Decomposition for Trivariate Signals. IEEE
Trans. Signal Process., 58(3), Mar. 2010.
S. O. Rice. Mathematical analysis of random noise. Bell Syst. Tech Journal, 23 :282332,
1944.
t
e
l
-
0
0
6
3
8
8
3
6
,
v
e
r
s
i
o
n
1
-
7
N
o
v
2
0
1
1
BIBLIOGRAPHIE 123
J.S. Richters. Communicationover fading dispersive channels. Technical Report 464, MIT
Res. Lab. Electronics, Cambridge, MA, 1967.
S. T. Rickard, R. V. Balan, H. V. Poor, and S. Verdu. Canonical time-frequency time-scale,
and frequency-scale representation of time-varying channels. Communic. in Inform.
and Systems, 5(2) :197226, 2005.
G. Rilling, P. Flandrin, P. Goncalves, and J.M. Lilly. Bivariate Empirical Mode Decom-
position. IEEE Signal Process. Lett., 14(12) :936939, 2007. software available at
http://perso.ens-lyon.fr/patrick.flandrin/emd.html.
A.R. Robinson and D. Lef. Oceanography and Acoustics. Prediction and Propagation Mo-
dels. AIP Press, 1994.
G. Rojo and M. Stojanovic. Peak-to-Average Power Ratio (PAR) Reduction for Acoustic
OFDM Systems. Marine Technology Society Journal, 44(4) :3041, 2010.
S. Roy, T. Duman, V. McDonald, and J. G. Proakis. High-Rate Communication for Under-
water Acoustic Channels Using Multiple Transmitters and Space-Time Coding : Recei-
ver Structures and Experimental Results. IEEE J. Ocean. Eng., 32(3) :663688, 2007.
E. Sangfelt, T. berg, B. Nilsson, and M. Lundberg-Nordenvaad. Underwater acoustic
communications in the Baltic sea. In Proc. UDT Asia 2008, Nov. 2008.
S. Sethuraman, L. Wang, B. Hajek, and A. Lapidoth. Low-SNR Capacity of Noncoherent
Fading Channels. IEEE Trans. Inf. Theory, 55(4) :15551574, 2009.
V. Sethuraman and B. Hajek. Capacity per unit energy of fading channels with a peak
constraint. IEEE Trans. Inf. Theory, 51(9), 2005.
S. Shamai and I. Bar-David. The capacity of average and peak-power-limited quadrature
gaussian channels. IEEE Trans. Inf. Theory, 41(4), Jul. 1995.
C. E. Shannon. A mathematical theory of communication. Bell System Technical Journal,
27 :379423, 1948.
B.S. Sharif, J. Neasham, O.R. Hinton, andA.E. Adams. AComputationally Efcient Doppler
Compensation System for Underwater Acoustic Communications. IEEE J. Ocean. Eng.,
25(1), 2000.
J. Shore and R. Johnson. Axiomatic Derivation of the Principle of Maximum Entropy and
the Principle of MinimumCross-Entropy. IEEE Trans. Inf. Theory, 26(1) :2637, 1980.
A.C. Singer, J.K. Nelson, and S.S. Kozat. Signal processing for underwater acoustic com-
munications. IEEE Commun. Mag., pages 9096, Jan. 2009.
F.-X. Socheleau, J.-M. Passerieux, and C. Laot. Characterisation of Time-Varying Under-
water Acoustic CommunicationChannel withApplicationto Channel Capacity. InProc.
Underwater Acoustic Measurement, Jun. 2009.
t
e
l
-
0
0
6
3
8
8
3
6
,
v
e
r
s
i
o
n
1
-
7
N
o
v
2
0
1
1
124 BIBLIOGRAPHIE
F.-X. Socheleau, C. Laot, and J.-M. Passerieux. Concise derivation of scattering function
from channel entropy maximization. IEEE Trans. Commun, 58(11), Nov. 2010.
F.-X. Socheleau, C. Laot, and J.-M. Passerieux. Stochastic Replay of non-WSSUS Under-
water Acoustic Communication Channels Recorded at Sea. IEEE Trans. Signal Process.,
59(10) :48384849, 2011a.
F.-X. Socheleau, J.-M. Passerieux, andC. Laot. Acoustic Modems Performance Assessment
via Stochastic Replay of at Sea Recorded underwater Acoustic Communication Chan-
nels. In Proc. Underwater Acoustic Measurement : Technologies and Results, Jun. 2011b.
M.A. Stephens. EDF Statistics for Goodness of Fit and Some Comparisons. Journal of the
American Statistical Association, 69(347) :730737, 1974.
S. Stigler. Fisher and the 5% level. Chance, 21(4), 2008.
M. Stojanovic. On the Relationship Between Capacity and Distance in an Underwater
Acoustic Communication Channel. ACM SIGMOBILE Mobile Computing and Commu-
nications Review(MC2R), 11(4) :6443, 2007.
M. Stojanovic. Underwater Acoustic Communications : Design Considerations on the
Physical Layer. In Proc. IEEE Conf. on Wireless On demand Network Systems and Ser-
vices, Jan. 2008.
M. Stojanovic and J. Preisig. Underwater Acoustic Communication Channels : Propaga-
tion Models and Statistical Characterization. IEEE Commun. Mag., pages 8489, Jan.
2009.
M. Stojanovic, S. Shahabudeen, and M. Chitre. Underwater acoustic communications
and networking : Recent advances and future challenges. Marine Technology Society
Journal, 42(1), 2008.
M. Stovanovic and L. Freitag. Integrated doppler tracking and efcient
resampling for phase coherent acoustic communication. available :
www.mit.edu/militsa/resources/pdfs/joedop.pdf.
T. Strohmer and S. Beaver. Optimal OFDMdesign for time-frequency dispersive channels.
IEEE Trans. Commun, 51(7), July 2003.
G. Taubck and F. Hlawatsch. On the Capacity-Achieving input Covariance for Multicar-
rier Communications over Doubly Selective Channels. In Proc. IEEEInternational Sym-
posium on Information Theory, June. 2007.
B. Tomasi, J. Preisig, G. B. Deane, and M. Zorzi. A Study on the Wide-Sense Stationarity of
the Underwater Acoustic Channel for Non-coherent Communication Systems. In Proc.
of IEEE European Wireless, Apr. 2011.
J. Trubuil, A. Goalic, N. Beuzelin, and C. Laot. Underwater acoustic communicationusing
reed solomon block turbo codes channel coding to transmit images and speech. In
Proc. IEEE Oceans10, Sep. 2010.
t
e
l
-
0
0
6
3
8
8
3
6
,
v
e
r
s
i
o
n
1
-
7
N
o
v
2
0
1
1
BIBLIOGRAPHIE 125
J. Ufnk. Can the Maximum Entropy Principle be Explained as a Consistency Require-
ment. Stud. Hist. Phil. Mod. Phys., 26(3) :223261, 1996.
P. van Walree. Channel sounding for acoustic communications : techniques and shallow-
water exemples. Research report, Norwegian Defence Research Establishment (FFI),
2011.
P. van Walree, P. Jenserud, and M. Smedsrud. A Discrete-Time Channel Simulator Driven
by Measured Scattering Functions. IEEE J. Sel. Areas Commun., 26(9) :16281637, 2008.
S. Wei, D.L. Goeckel, and P.A. Kelly. Convergence of the Complex Envelope of Bandlimited
OFDM Signals. IEEE Trans. Inf. Theory, 56(10), Oct. 2010.
Z. Wu, N. E. Huang, S. R. Long, and C.-K. Peng. On the trend, detrending, and variability
of nonlinear and nonstationary time series. Proc. of the National Academy of Sciences,
104(38), 2007.
G. Xie, J. Gibson, and L. Diaz-Gonzalez. Incorporating Realistic Acoustic PropagationMo-
dels in Simulation of Underwater Acoustic Networks : A Statistical Approach. In Proc.
IEEE Oceans Conf., Sep. 2006.
Y. Yao and G.B. Giannakis. Rate-Maximizing power Allocation in OFDM Based on Partial
Channel Knowledge. IEEE Trans. Wireless Commun., 4(3) :10731083, 2005.
E. Zamanizadeh, J. Gomes, and J. Bioucas-Dias. dentication and matching of sparse
delay-doppler spread functions fromhigh-frequency communications signals. In Proc.
IEEE Oceans 2010, Seattle, USA, Sep. 2010.
R. Zamir andM. Feder. Ageneralizationof the entropy power inequality withapplications.
IEEE Trans. Inf. Theory, 39(5), Sep. 1993.
J.J. Zhang, A. Papandreou-Suppappola, B. Gottin, and C. Ioana. Time-Frequency Charac-
terizationand Receiver WaveformDesign for ShallowWater Environments. IEEETrans.
Signal Process., 57(8) :29732985, 2009.
t
e
l
-
0
0
6
3
8
8
3
6
,
v
e
r
s
i
o
n
1
-
7
N
o
v
2
0
1
1
t
e
l
-
0
0
6
3
8
8
3
6
,
v
e
r
s
i
o
n
1
-
7
N
o
v
2
0
1
1
ANNEXE
A
Solution numrique de
lquation (2.19)
Pour obtenir les multiplicateurs de Lagrange
p
de lquation (2.19), une mthode
simple du type gradient, similaire celle prsente dans [Djafari] est suggre. Le vecteur
=[
p
]
pP
est trouv en rsolvant le systme
G
q
() =
_
max
min
pP
p
p
d =
q
, q P. (A.1)
Cette quation est rsolue itrativement en dveloppant tout dabord G
q
() en srie de
Taylor autour dun vecteur initial
0
.
G
q
() G
q
(
0
) +(
0
)
T
grad
_
G
q
()
_
(=
0
)
. (A.2)
Si et v sont dnis comme
=
0
, (A.3)
v =[
q
G
q
(
0
)]
T
qP
(A.4)
et
=(
qn
) =
_
G
q
()
n
_
(=
0
)
(A.5)
alors,
=v. (A.6)
Notons que la matrice est symtrique avec
qn
=
nq
=
_
max
min
q+n
_
pP
p
p
_
2
d (A.7)
A chaque itration, est calcul et un nouveau
0
qui vrie
0
= est x. Les itra-
tions continues jusqu ce que soit sufsamment petit.
t
e
l
-
0
0
6
3
8
8
3
6
,
v
e
r
s
i
o
n
1
-
7
N
o
v
2
0
1
1
t
e
l
-
0
0
6
3
8
8
3
6
,
v
e
r
s
i
o
n
1
-
7
N
o
v
2
0
1
1
ANNEXE
B
Dcomposition modale
empirique
La dcomposition modale empirique, ou EMD pour empirical mode dcomposition,
cherche les modes doscillations intrinsques dun signal en se basant sur le principe
de sparation lchelle locale. Cette mthode repose sur la dcomposition dun signal
en une composante basse frquence locale ou tendance
0
(t ), et dune composante
haute frquence ou dtail m
0
(t ) tel que nimporte quel signal x(t ) valeurs relles sex-
prime comme
x(t ) =
0
(t ) +m
0
(t ). (B.1)
En dcomposant de la mme manire la tendance
0
(t ) comme
0
(t ) =
1
(t )+m
1
(t ) et
en rptant de faon rcursive cette oprationQ fois, x(t ) peut se reprsenter comme
x(t ) =
Q1
(t ) +
Q1
q=0
m
q
(t ). (B.2)
La discrimination entre les oscillations lentes et rapides est obtenue laide dun algo-
rithme dit de tamisage (ou sifting ), qui fait itrer un oprateur non linaire S sur le
signal jusqu ce quun critre darrt soit satisfait. Loprateur S opre comme suit :
1. Identication de tous les extrema de x(t ).
2. Interpolation (par une spline cubique) entre les minima (resp. maxima) pour dnir
une enveloppe e
mi n
(t ) (resp. e
max
(t )).
3. Calcul de la moyenne locale ou rsidu (t ) =(e
mi n
(t ) +e
max(t)
)/2.
4. Extraction du dtail par soustraction de la moyenne locale S[x](t ) =x(t ) (t ).
5. Itration des tapes prcdentes sur le dtail S[x](t ) jusqu lobtention dun rsidu
nal dnergie insigniante.
Si le critre darrt est atteint aprs n itrations, le dtail et la tendance locales sont dnis
comme m
0
(t ) = S
n
[x](t ) and
0
(t ) = x(t ) m
0
(t ). Une illustration dynamique de lEMD
est disponible http ://perso.ens-lyon.fr/patrick.andrin/emd.html.
Une extension aux signaux bidimensionnels est propose dans [Rilling et al., 2007].
L o lEMD classique extrait des composantes oscillantes, lEMD bidimensionnelles ex-
trait des composantes tournantes. An de sparer les composantes les plus rapides de
t
e
l
-
0
0
6
3
8
8
3
6
,
v
e
r
s
i
o
n
1
-
7
N
o
v
2
0
1
1
130 ANNEXE B. DCOMPOSITION MODALE EMPIRIQUE
celles plus lentes, lide consiste une fois de plus dnir la composante tournante lente
comme la moyenne dune certaine enveloppe. Lenveloppe est alors un tube trois di-
mensions qui entoure troitement le signal. Le tube est obtenu en projetant le signal
deux dimensions dans plusieurs directions.
Pour plus de dtails sur lEMD, le lecteur peut se rfrer [Rilling et al., 2007;
Huang et al., 1998; Rehman and Mandic, 2010; Wu et al., 2007].
t
e
l
-
0
0
6
3
8
8
3
6
,
v
e
r
s
i
o
n
1
-
7
N
o
v
2
0
1
1
ANNEXE
C
Dtails sur la preuve du
thorme 4.3.2
C.1 Calcul de lim
N
1
N
logdet
y
Notons tout dabord que lindpendance mutuelle de x et H ainsi que lutilisation de
symboles moyenne nulle implique E
_
y
_
=0. De (4.3), il vient que
y
=
2
w
I
N
+
2
x
_
H
H
+E
_
_
H
H
__
H
H
_
__
, (C.1)
o
H
=E{H}. En utilisant lhypothse WSSUS, il peut tre vri que
E
_
_
H
H
__
H
H
_
_
=D(v), (C.2)
o v est un vecteur N 1 dont les lments sont donns par v
n
=
min(n,L1)
i =0
2
h
(i ). Pour
une valeur de L nie, lim
N
1
N
D(v)
2
H
I
N
F
=0, tel que les matrices D(v) et
2
H
I
N
sont quivalentes asymptotiquement
1
. En utilisant [Gray, 2006, Corollaire 2.4], il sen suit
que
lim
N
1
N
logdet
y
= lim
N
1
N
logdet
_
2
w
I
N
+
2
x
_
H
H
+D(v)
__
= lim
N
1
N
logdet
_
2
w
I
N
+
2
x
_
H
H
+
2
H
I
N
__
. (C.3)
Dsignons maintenant par
T
H
la matrice circulante cousine de
H, i.e.,
T
H
=
_
_
_
_
_
_
_
_
_
_
_
_
h
0
h
L1
. . .
h
1
h
1
h
0
.
.
.
.
.
.
.
.
.
.
.
.
.
.
. 0
h
L1
h
L1
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
0
h
L1
. . .
h
1
h
0
_
_
_
_
_
_
_
_
_
_
_
_
.
1. Pour lquivalence asymptotique, nous supposons implicitement que
h
(i ) < +, i (voir [Gray,
2006, Section 2.3] pour plus de details).
t
e
l
-
0
0
6
3
8
8
3
6
,
v
e
r
s
i
o
n
1
-
7
N
o
v
2
0
1
1
132 ANNEXE C. DTAILS SUR LA PREUVE DU THORME ??
Comme montr dans [Gray, 2006, Lemme 4.2],
H et
T
H
sont quivalentes asymptoti-
quement. De plus,
T
H
T
H
et
H
H
sont dnies non-ngatives et logdet est continu. Par
consquent, [Gray, 2006, Corollaire 2.4]
lim
N
1
N
logdet
y
=log
2
w
+ lim
N
1
N
logdet
__
1+
2
x
2
H
2
w
_
I
N
+
2
x
2
w
T
H
T
H
_
. (C.4)
La dcomposition en valeurs propres de
T
H
est
T
H
= F
N
E
H
F
N
, o F
N
est la matrice
de Fourier de taille N et o E
H
est une matrice N N dont les lments sont tous nuls
excepts les lments de la diagonale qui sont gaux la transforme de Fourier discrte
de la rponse moyenne du canal, i.e.,
[E
H
]
n,n
=
L1
k=0
h
k
e
2j k n/L
.
En utilisant ce dernier rsultat, pour N , la densit des valeurs propres de la matrice
T
H
T
H
tend vers une limite qui est le spectre |
H
()|
2
. Nous obtenons nalement
lim
N
1
N
log det
y
=log
2
w
+
_
1/2
1/2
log
_
1+
2
x
2
w
_
2
H
+|
H
()|
2
_
_
d. (C.5)
C.2 Calcul de lim
N
1
N
logdet
y|x
Daprs (4.5), nous avons
y|x
=
2
w
I
N
+E
_
L1
p,l =0
_
(h
p
h
p
) x
p
_ _
(h
l
h
l
) x
l
_
_
(a)
=
2
w
I
N
+
L1
p,l =0
D(x
p
) E
_
[h
p
h
p
][h
l
h
l
]
+
_
D(x
l
)
(b)
=
2
w
I
N
+
L1
p,l =0
D(x
p
)R
H
(l )(p l )D(x
l
)
(c)
=
2
w
I
N
+
L1
l =0
D(x
l
)R
H
(l )D(x
l
)
(d)
=
2
w
I
N
+
L1
l =0
R
H
(l ) x
l
x
l
o (a) vient de lindpendance mutuelle de H, x et w, et aussi du fait que uv =uD(v) =
D(v)u, quels que soient les vecteurs u et v de la mme dimension; (b) et (c) dcoule de
lhypothse WSSUS et (d) rsulte des proprits des produit dHadamard.
En notant que x
l
x
l
est asymptotiquement quivalent
2
xx
, i.e.,
lim
N
1
N
x
l
x
l
xx
F
=0, il vient que
lim
N
1
N
logdet
y|x
=log
2
w
+ lim
N
1
N
logdet
_
I
N
+
1
2
w
R
H
xx
_
. (C.6)
2. On notera que la limitation de la puissance crte sur x implique que la norme forte de xx
, telle que
dnie dans [Gray, 2006, Eq. (2.13)], est aussi borne.
t
e
l
-
0
0
6
3
8
8
3
6
,
v
e
r
s
i
o
n
1
-
7
N
o
v
2
0
1
1
ANNEXE
D
Dtails sur la preuve du
thorme 4.3.3
Le terme I (y; x|H) de lquation (4.24) peut se minorer en utilisant le lemme de Zamir
et Feder qui peut snoncer comme suit.
Lemme (Zamir et Feder [Zamir and Feder, 1993]) : Tout vecteur u de dimension N 1
dont les lments [u
0
, , u
N1
]
T
sont mutuellement indpendants et valeurs relles et
toute matrice relle A dterministe de taille MN, vrient la relation
h
E
(Au) h
E
(A u) (D.1)
o u est un vecteur alatoire de taille N 1 avec des entres gaussiennes indpendantes
[ u
0
, , u
N1
]
T
, telles que h
E
( u
n
) =h
E
(u
n
), 0 n N 1.
Notons que le lemme sapplique uniquement pour une matrice Aet unvecteur u rels.
La premire tape de la dmonstration consiste donc sparer les parties relles et ima-
ginaires.
u C
N
et A C
NN
, nous posons
u =
_
(u)
(u)
_
and
A =
_
(A) (A)
(A) (A)
_
, (D.2)
tel que la relation dentre-sortie du canal devienne
y =
H x + w =
_
H I
2N
_
_
x
w
_
. (D.3)
Notons que linformation mutuelle de y et x conditionnellement H satisfait
I (y; x|H) = h
E
(y|H) h
E
(y|x, H) (D.4)
= h
E
(y|H) N log(e
2
w
). (D.5)
Considrons maintenant lensemble des vecteurs x qui correspondent lensemble
des vecteurs x satisfaisant (4.1) et (4.2) avec des entres i.i.d moyenne nulle et dont les
parties relles et imaginaires sont i.i.d. Pour borner h
E
(y|H), nous suggrons tout dabord
de trouver la distribution de x, au sein de cet ensemble, qui maximise lentropie h
E
( x).
Cette distribution est obtenue en rsolvant le problme doptimisation suivant
t
e
l
-
0
0
6
3
8
8
3
6
,
v
e
r
s
i
o
n
1
-
7
N
o
v
2
0
1
1
134 ANNEXE D. DTAILS SUR LA PREUVE DU THORME ??
max
p
x
h
E
( x),
sous contraintes
_
2N
p
x
( x)d x =1,
_
2N
x
2
p
x
( x)d x
N
2
x
, (D.6)
o
2N
est le support de la densit de probabilit p
x
. Pour satisfaire (4.1) avec des com-
posantes i.i.d moyenne nulle,
2N
est dni comme un hypercube de dimension 2N
o chaque ct est compris entre
x
/
2 et
x
/
2. En utilisant les conditions de
Karush-Kuhn-Tucker, la solution ce problme de maximisation est de la forme p
x
( x) =
2N
n=1
Ke
x
2
n
o K et vrient
_
x
2
Ke
x
2
n
d x
n
= 1, (D.7)
_
x
2
x
2
n
Ke
x
2
n
d x
n
2
x
2
, (D.8)
_
_
x
2
x
2
n
Ke
x
2
n
d x
n
2
x
2
_
= 0, (D.9)
0. (D.10)
A partir de cet ensemble dquations, on peut vrier que = 0 et K = 1/(
2
x
) sont
les solutions du problme doptimisation tant que 1 3. Dans ce cas, p
x
( x) est une
distribution uniforme sur le support
2N
, impliquant
2
x
=
2
x
/3 (ce qui satisfait (4.2) tant
que 3). Pour > 3, p
x
est une gaussienne tronque o K et sont les solutions du
systme
_
x
2
Ke
x
2
n
d x
n
= 1, (D.11)
_
x
2
x
2
n
Ke
x
2
n
d x
n
=
2
x
2
, (D.12)
qui peut tre rsolu numriquement.
Quel que soit , lentropie diffrentielle de chaque entre de x est alors
1
h
E
( x
n
) = E
_
log
_
Ke
x
2
n
__
,
h
E
( x
n
) = log(K) +E
_
x
2
n
_
,
h
E
( x
n
) = log(K) +
2
x
2
. (D.13)
1. Notons que dans le cas o 3, E
_
x
2
n
_
=
2
x
/6 et non
2
x
/(2). Cependant, tant nul pour 3,
(D.13) reste valide pour tout 1.
t
e
l
-
0
0
6
3
8
8
3
6
,
v
e
r
s
i
o
n
1
-
7
N
o
v
2
0
1
1
135
Ceci est aussi lentropie diffrentielle dune variable alatoire gaussienne valeurs relles
de variance e
2
x
/
/(2eK
2
).
Dnotons par x R
2N
, un vecteur gaussien moyenne nulle avec E
_
x x
_
=
e
2
x
/
I
2N
/(2eK
2
) et dnissons y =
H x + w =
_
H I
2N
_
_
x
w
_
. Lentropie diffrentielle de
x tant gale lentropie diffrentielle de x et w tant un vecteur gaussien indpendant
de x et x, nous obtenons h
E
( x, w) = h
E
( x, w), de sorte que le lemme de Zamir et Feder
sapplique. Par consquent,
h
E
(y|H) h
E
(y|H). (D.14)
Conditionnellement H, y R
2N
est un vecteur gaussien de matrice de covariance
E
_
yy
|H
_
=
1
2
_
2
w
I
2N
+
e
2
x
/
eK
2
H
H
_
. (D.15)
Daprs la dnition de lentropie conditionnelle, il sen suit que
I (y; x|H) E
H
_
logdet
_
2
w
I
N
+
e
2
x
/
eK
2
HH
__
. (D.16)
Le thorme 4.3.3 est ainsi obtenu en substituant (D.16) dans (4.24). Notons que pour
1 3, =0 et K =1/(
2
x
) tel que (D.16) se simplie comme
I (y; x|H) E
H
_
logdet
_
2
w
I
N
+
2
2
x
e
HH
__
. (D.17)
t
e
l
-
0
0
6
3
8
8
3
6
,
v
e
r
s
i
o
n
1
-
7
N
o
v
2
0
1
1
t
e
l
-
0
0
6
3
8
8
3
6
,
v
e
r
s
i
o
n
1
-
7
N
o
v
2
0
1
1
ANNEXE
E
Bornes sur le rapport
signal sur interfrence
A partir de la dnition du rapport signal sur interfrence donne lquation (5.18)
et en remarquant que
min
(,)D
A
,g
(, )
__
(,)D
S
H
(, )dd
. .
=m
h
S
H
(, )
A
,g
(, )
2
dd
max
(,)D
A
,g
(, )
__
(,)D
S
H
(, )dd
. .
=M
h
(E.1)
et que
min
(,)D
=
(k
,n
)=(0,0)
A
,g
_
+k
T, +n
F
_
__
(,)D
S
H
(, )dd
. .
=m
I
=
(k
,n
)=(0,0)
_
A
,g
(, )
2
S
H
(k
T, n
F) dd
max
(,)D
=
(k
,n
)=(0,0)
A
,g
_
+k
T, +n
F
_
__
(,)D
S
H
(, )dd
. .
=M
I
,
(E.2)
nous pouvons crire L
SIR
SIRU
SIR
avec
L
SIR
=
1
N
N1
n=0
m
h
+
,g
(, 0)e
j 2nF
d
2
M
I
+
=
(k
,n
)=(0,0)
h
k
T
A
,g
(, n
F)e
j 2(n
+n)(k
T)F
d
2
(E.3)
t
e
l
-
0
0
6
3
8
8
3
6
,
v
e
r
s
i
o
n
1
-
7
N
o
v
2
0
1
1
138 ANNEXE E. BORNES SUR LE RAPPORT SIGNAL SUR INTERFRENCE
et
U
SIR
=
1
N
N1
n=0
M
h
+
,g
(, 0)e
j 2nF
d
2
m
I
+
=
(k
,n
)=(0,0)
h
k
T
A
,g
(, n
F)e
j 2(n
+n)(k
T)F
d
2
. (E.4)
t
e
l
-
0
0
6
3
8
8
3
6
,
v
e
r
s
i
o
n
1
-
7
N
o
v
2
0
1
1
Vous aimerez peut-être aussi
- Transparents SDEDocument56 pagesTransparents SDEOulghazi hamidPas encore d'évaluation
- TD14 CorDocument15 pagesTD14 CorBlack StarPas encore d'évaluation
- Leçon1 M1Document4 pagesLeçon1 M1manix09Pas encore d'évaluation
- DS Probabilite Loi BinomialeDocument2 pagesDS Probabilite Loi BinomialeLilly Hope MiliPas encore d'évaluation
- Gestion de Projet - Calcul Probabilist PDFDocument14 pagesGestion de Projet - Calcul Probabilist PDFGuennael KamahaPas encore d'évaluation
- Annale Maths Bac S Amerique Du Sud Novembre 2019 SujetDocument6 pagesAnnale Maths Bac S Amerique Du Sud Novembre 2019 SujethessasPas encore d'évaluation
- Analyse D'effet Domino - Methodes Et OutilsDocument16 pagesAnalyse D'effet Domino - Methodes Et OutilsAnonymous 1FzIK5hPas encore d'évaluation
- 21 - Loi NormaleDocument9 pages21 - Loi Normalesalahbouch55556Pas encore d'évaluation
- StochastiqueDocument2 pagesStochastiqueNajib BaddouPas encore d'évaluation
- Bio StatistiqueDocument179 pagesBio StatistiqueAgaHuong100% (3)
- 08 ProbabiliteDocument6 pages08 ProbabiliteRavaka DiamondraPas encore d'évaluation
- Poly Stat Bay 123Document45 pagesPoly Stat Bay 123Sarah SouidPas encore d'évaluation
- Le Modele CreditRisk 1Document4 pagesLe Modele CreditRisk 1Nabil KgPas encore d'évaluation
- EstimationDocument10 pagesEstimationJunior AdyaPas encore d'évaluation
- Ouala Samira (Analyse Statistique Des Durées de Chomage)Document113 pagesOuala Samira (Analyse Statistique Des Durées de Chomage)Ahmed FenneurPas encore d'évaluation
- Correction Série de Révision ProbabilitésDocument3 pagesCorrection Série de Révision ProbabilitésWael MaatougPas encore d'évaluation
- 2bex 08 Probabilité Cr1Fr AmmariDocument2 pages2bex 08 Probabilité Cr1Fr AmmariSami SimPas encore d'évaluation
- Cocoa in Cote D - IvoireDocument20 pagesCocoa in Cote D - Ivoiretoni_yousf2418Pas encore d'évaluation
- Files DDocument13 pagesFiles Dbenassane100% (2)
- Corriger de L'examen de Statistique Et ProbabilitéDocument10 pagesCorriger de L'examen de Statistique Et ProbabilitéMoslim IslamPas encore d'évaluation
- Maths15 ProbabilitesDocument6 pagesMaths15 ProbabilitesFouzia BadiPas encore d'évaluation
- 223 Cours ProbabilitesDocument19 pages223 Cours Probabilitesالـيــاس 『ÃĞ』Pas encore d'évaluation
- Cours Proba S5Document41 pagesCours Proba S5Meriem AqliPas encore d'évaluation
- Probabilite Continue ExerciceDocument1 pageProbabilite Continue ExerciceCharlotte BrontePas encore d'évaluation
- BootranspDocument74 pagesBootranspTagna_bertrandPas encore d'évaluation
- Les Lois de ProbabilitésDocument9 pagesLes Lois de ProbabilitésLord AhmedPas encore d'évaluation
- Corr Serie 2 Prob SMC s4 - CompressedDocument7 pagesCorr Serie 2 Prob SMC s4 - CompressedAbderrachid GAME OFFICIELPas encore d'évaluation
- Théorie de DecisionDocument113 pagesThéorie de DecisionMed AbdelPas encore d'évaluation
- Corrige 4Document4 pagesCorrige 4jawharatikawtaPas encore d'évaluation
- Cours 1 OkDocument1 pageCours 1 OkMaxime HengertPas encore d'évaluation