Vous aimerez peut-être aussi
- Apprendre et enseigner sur le Web: quelle ingénierie pédagogique?D'EverandApprendre et enseigner sur le Web: quelle ingénierie pédagogique?Pas encore d'évaluation
- OptimisationDocument46 pagesOptimisationsabrinePas encore d'évaluation
- TD R0 2018 PDFDocument8 pagesTD R0 2018 PDFYassminaPas encore d'évaluation
- Cours Ro PontsDocument177 pagesCours Ro PontsJawhar BachaPas encore d'évaluation
- ACP M2 Print PDFDocument32 pagesACP M2 Print PDFJunior Ebong Moudoubou100% (1)
- Chapitre-12 SERIE STATISTIQUE À 2 CARACTERES 2Document34 pagesChapitre-12 SERIE STATISTIQUE À 2 CARACTERES 2FULGENCE DIBIPas encore d'évaluation
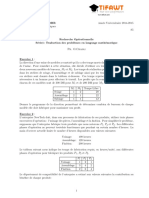
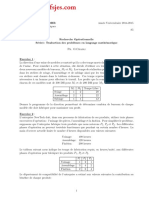
- Traduction Problemes Langage MathematiqueDocument11 pagesTraduction Problemes Langage MathematiqueNadiaa AdjoviPas encore d'évaluation
- 5386d49d35c8a PDFDocument48 pages5386d49d35c8a PDFBader EdPas encore d'évaluation
- 3 DM SolutionsDocument6 pages3 DM SolutionsGojo SatoruPas encore d'évaluation
- 7-Recherche OperationnelleDocument16 pages7-Recherche OperationnelleAbdou OuChPas encore d'évaluation
- Chapitre 4 Section III - Résolution Graphique Du Problème LinéaireDocument7 pagesChapitre 4 Section III - Résolution Graphique Du Problème LinéaireGhandour SanaPas encore d'évaluation
- Cours 1 Optimisation MultiobjectifDocument12 pagesCours 1 Optimisation MultiobjectifIlham TimadjerPas encore d'évaluation
- Last PartDocument18 pagesLast PartreafoPas encore d'évaluation
- QuadratiqueDocument9 pagesQuadratiqueAD ILPas encore d'évaluation
- Theorie Des Graphes Et Reseaux2021-Part1Document26 pagesTheorie Des Graphes Et Reseaux2021-Part1Thorece DonfackPas encore d'évaluation
- VE - L2S3 Chapitre 4 Couple de VADocument8 pagesVE - L2S3 Chapitre 4 Couple de VARadwane LourhmatiPas encore d'évaluation
- SMI5 2010 EtudiantsDocument27 pagesSMI5 2010 EtudiantsRfx Bzx100% (1)
- correctionEpreuveCC2021 2022 PDFDocument6 pagescorrectionEpreuveCC2021 2022 PDFVainkeur EmmanuelPas encore d'évaluation
- Corrigé TD - RO by Moussa Merraoui PDFDocument8 pagesCorrigé TD - RO by Moussa Merraoui PDFMed ElbataniPas encore d'évaluation
- TD N°4-1Document13 pagesTD N°4-1Imad HakkachePas encore d'évaluation
- Optimm1 1920 UzawaDocument39 pagesOptimm1 1920 UzawaSof IanePas encore d'évaluation
- Langage CDocument47 pagesLangage CGuy Guy100% (1)
- TD5 CorrigesDocument4 pagesTD5 Corrigeskukis14Pas encore d'évaluation
- TD3 CorrDocument4 pagesTD3 CorrKHADIJA LAPas encore d'évaluation
- TD Variance Avec SolutionDocument20 pagesTD Variance Avec Solutionbanse JulesPas encore d'évaluation
- Initiation Aux Séries ChronologiquesDocument13 pagesInitiation Aux Séries ChronologiqueskarimPas encore d'évaluation
- Ensemble MathematiqueDocument6 pagesEnsemble Mathematiquelelipse100% (2)
- Sujet Corrige CC AnalyseNumerique1Document3 pagesSujet Corrige CC AnalyseNumerique1Ahmed Rabii100% (1)
- 3MS Combi Probas 2012Document54 pages3MS Combi Probas 2012Anemi MXPas encore d'évaluation
- CodageDocument22 pagesCodageladabd2Pas encore d'évaluation
- TD2 PLDocument3 pagesTD2 PLYassminaPas encore d'évaluation
- 06 OrdonnancementDocument26 pages06 OrdonnancementbouchPas encore d'évaluation
- DCG UE11 2018 SujetDocument15 pagesDCG UE11 2018 SujetMohamed ErrassafiPas encore d'évaluation
- Cha 6Document18 pagesCha 6Blh OussamaPas encore d'évaluation
- CoursIA 1Document32 pagesCoursIA 1Khlifi AssilPas encore d'évaluation
- Examen Final ANALYSE DES DONNEESDocument3 pagesExamen Final ANALYSE DES DONNEESGNAMIEN-WA EVRARD ERWAN AHUIEPas encore d'évaluation
- Chapitre4 Tableaux JAVADocument25 pagesChapitre4 Tableaux JAVAmayma barPas encore d'évaluation
- Recap Par Ecole Par FilieeDocument2 pagesRecap Par Ecole Par FilieeAbderrahim OuakkiPas encore d'évaluation
- Devoir Commun Math 1 Lycee PissarroDocument3 pagesDevoir Commun Math 1 Lycee PissarroSaikou Oumar BarryPas encore d'évaluation
- Cours Recherche OpérationnelDocument60 pagesCours Recherche OpérationnelMouad GuendouzPas encore d'évaluation
- (s2) Informatiques - Examen 2005 (Session de Rattrapage)Document5 pages(s2) Informatiques - Examen 2005 (Session de Rattrapage)OverDocPas encore d'évaluation
- 0 BEN RABAA Mars 2018Document10 pages0 BEN RABAA Mars 2018Rayen FekihPas encore d'évaluation
- TD Inf365Document6 pagesTD Inf365Ousmanou Adamou SaïdouPas encore d'évaluation
- TD Machine Regression PythonDocument3 pagesTD Machine Regression Pythontest testPas encore d'évaluation
- Les CodesDocument7 pagesLes CodesAbderrahmane Baba KhelilPas encore d'évaluation
- L'implémentation de L'algorithme de Bellman-Ford Et Son Application 2Document17 pagesL'implémentation de L'algorithme de Bellman-Ford Et Son Application 2jeanogou83Pas encore d'évaluation
- Cours - Applications LineairesDocument18 pagesCours - Applications LineairesCabinet de Gestion et d'Assistance FinancierePas encore d'évaluation
- Interface GraphiqueDocument181 pagesInterface GraphiqueMoncef ComputerPas encore d'évaluation
- Génie Logiciel Avancé Cours 4 - Conception - Stefano Zacchiroli PDFDocument83 pagesGénie Logiciel Avancé Cours 4 - Conception - Stefano Zacchiroli PDFEn Personne AlaeddinePas encore d'évaluation
- Exam Janv17 Graphes CorrectionDocument5 pagesExam Janv17 Graphes CorrectionMaurice Comlan100% (1)
- Integration Du Systeme D Aide A La Decision Multicriteres Et Du Systeme D Intelligence Que Dans L Ere ConcurrentielleDocument199 pagesIntegration Du Systeme D Aide A La Decision Multicriteres Et Du Systeme D Intelligence Que Dans L Ere ConcurrentielleayanouhaPas encore d'évaluation
- Chap 03 ExercicesDocument35 pagesChap 03 ExercicesmechkourPas encore d'évaluation
- Corrige2 PDFDocument4 pagesCorrige2 PDFanas100% (1)
- Cours Programmation Dynamique - v2Document11 pagesCours Programmation Dynamique - v2Bob GribyPas encore d'évaluation
- Cours ProgrammationDocument68 pagesCours Programmationgattal boutheynaPas encore d'évaluation
- TD 3 CompilationDocument2 pagesTD 3 Compilationnikan74883Pas encore d'évaluation
- Formation 3D par la pratique avec C#5 et WPF: Modeliser des moleculesD'EverandFormation 3D par la pratique avec C#5 et WPF: Modeliser des moleculesPas encore d'évaluation
- La théorie des jeux: Thrillers judiciaires de Katerina Carter, #2D'EverandLa théorie des jeux: Thrillers judiciaires de Katerina Carter, #2Pas encore d'évaluation
- Twistronics: Le saint graal de la physique, des matériaux quantiques et des nanotechnologiesD'EverandTwistronics: Le saint graal de la physique, des matériaux quantiques et des nanotechnologiesPas encore d'évaluation
- Programme de Cours Rcp110Document1 pageProgramme de Cours Rcp110conso-fusionPas encore d'évaluation
- Exercices: Solutionnaire: DualDocument15 pagesExercices: Solutionnaire: DualLuc Marc KazadiPas encore d'évaluation
- Chap 1 Formulation D'un Programme LineaireDocument6 pagesChap 1 Formulation D'un Programme LineaireBadis Besbes100% (2)
- Optimisation Lin Eaire: TH Eorie: S. Le Digabel, Polytechnique Montr EalDocument79 pagesOptimisation Lin Eaire: TH Eorie: S. Le Digabel, Polytechnique Montr EalAlassad SfinaPas encore d'évaluation
- Groupe E1&E2Document49 pagesGroupe E1&E2Yasmine ElkacemiPas encore d'évaluation
- Outils D'aide À La Décision Et OptimisationDocument69 pagesOutils D'aide À La Décision Et OptimisationDhikrane Nafaa100% (2)
- Serie PL 1Document3 pagesSerie PL 1taki0% (1)
- Sujet 1: L'algorithme Du Simplexe R Evis Eet L'algorithme Simplexe Avec BornesDocument26 pagesSujet 1: L'algorithme Du Simplexe R Evis Eet L'algorithme Simplexe Avec BornesJihan SaidiPas encore d'évaluation
- Méthode Du Simplexe - 2021Document8 pagesMéthode Du Simplexe - 2021Bitote ADPas encore d'évaluation
- Gestion Production Cour 1Document18 pagesGestion Production Cour 1MimounGuenfoudi100% (2)
- 1Document3 pages1Sarah DerrichePas encore d'évaluation
- Projet RO 2021Document4 pagesProjet RO 2021Woly MbayePas encore d'évaluation
- Cours RO P1Document34 pagesCours RO P1imane taaPas encore d'évaluation
- 2023 CH3 Methhode GraphiqueDocument6 pages2023 CH3 Methhode GraphiqueMohamed Moussa DialloPas encore d'évaluation
- 6Ã Me Maths 415265 - DocDocument6 pages6Ã Me Maths 415265 - Docemysphere01Pas encore d'évaluation
- DualitéDocument7 pagesDualitézinebPas encore d'évaluation
- Recherche Opérationnelle: Introduction, Modélisation Et Résolution GraphiqueDocument47 pagesRecherche Opérationnelle: Introduction, Modélisation Et Résolution Graphiqueel aydiPas encore d'évaluation
- Cours Partie 2 Resolution GraphiqueDocument8 pagesCours Partie 2 Resolution Graphiquecasa shoppingPas encore d'évaluation
- Recherche Op Chap 1 - S6 - Youb Manal PDFDocument24 pagesRecherche Op Chap 1 - S6 - Youb Manal PDFlahcenPas encore d'évaluation
- Recherche Operat ExamenDocument2 pagesRecherche Operat ExamenJihed Bey100% (1)
- TD Ro 3 2022 2023Document2 pagesTD Ro 3 2022 2023elammaryibtissam777Pas encore d'évaluation
- Série III - Méthode SimplexeDocument9 pagesSérie III - Méthode SimplexeEl Mahdi AhouadPas encore d'évaluation
- Cours 1Document16 pagesCours 1Alassad SfinaPas encore d'évaluation
- Rapport de Stage Au LTDK - Adamou Hadji Mohamadou - 2018Document50 pagesRapport de Stage Au LTDK - Adamou Hadji Mohamadou - 2018Adamou hadji MohamadouPas encore d'évaluation
- Programmation LinéaireDocument57 pagesProgrammation LinéairemeddebyounesPas encore d'évaluation
- SaraDocument82 pagesSaraSofiane LaghouatiPas encore d'évaluation
- Programmation Linéaire en Nombres Entiers Pour L'ordonnancement Modulo Sous Contraintes de Ressources.Document75 pagesProgrammation Linéaire en Nombres Entiers Pour L'ordonnancement Modulo Sous Contraintes de Ressources.Med GasPas encore d'évaluation