Vous aimerez peut-être aussi
- EnsembleDocument1 pageEnsembleNabil HafyenePas encore d'évaluation
- TRIGONALISATIONDocument5 pagesTRIGONALISATIONNabil HafyenePas encore d'évaluation
- Stabilit ÉDocument4 pagesStabilit ÉNabil HafyenePas encore d'évaluation
- Matrices Symétriques: ProblèmeDocument3 pagesMatrices Symétriques: ProblèmeNabil HafyenePas encore d'évaluation
- Extraits Des Problèmes Classiques-Reduction Des EndomorphismesDocument4 pagesExtraits Des Problèmes Classiques-Reduction Des EndomorphismesNabil Hafyene75% (4)
- DM OptiqueDocument3 pagesDM OptiqueFatima BelallamPas encore d'évaluation
- Feuille 5: Transform Ees de Laplace, Fonctions Caract Eristiques, TH Eor' Emes LimitesDocument2 pagesFeuille 5: Transform Ees de Laplace, Fonctions Caract Eristiques, TH Eor' Emes Limitesazizd15Pas encore d'évaluation
- Fiche Vibrations Et Ondes M1Document3 pagesFiche Vibrations Et Ondes M1Yassine RékardPas encore d'évaluation
- ProduitsAVI June09Document73 pagesProduitsAVI June09guy_fauquembergue3827Pas encore d'évaluation
- TD AsynchroneDocument2 pagesTD AsynchroneSoufiane ElganiPas encore d'évaluation
- Devoir Surveillé 1a Bac SC Exp. No3 Le 24-5-2018 PR - SBIRO Abdelkrim-1 (WWW - Pc1.ma)Document4 pagesDevoir Surveillé 1a Bac SC Exp. No3 Le 24-5-2018 PR - SBIRO Abdelkrim-1 (WWW - Pc1.ma)loubnaPas encore d'évaluation
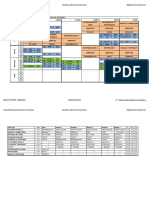
- EMPLOI DU TEMPS Licence Semestre 1 2022-2023-Avec TDDocument8 pagesEMPLOI DU TEMPS Licence Semestre 1 2022-2023-Avec TDsi salem tassaditPas encore d'évaluation
- Un Bref Cours de BalistiqueDocument9 pagesUn Bref Cours de Balistiqueludo37690% (1)
- Ligne de Transmission 1Document12 pagesLigne de Transmission 1Ismail MarhichiPas encore d'évaluation
- DM 3 SC ExDocument3 pagesDM 3 SC ExAmina El bourmakiPas encore d'évaluation
- LZMDocument46 pagesLZMAUGOSTINPas encore d'évaluation
- 2bac Continuité D'une FonctionDocument26 pages2bac Continuité D'une FonctionLEILA LOURDIPas encore d'évaluation
- TF06 Transitoire 06Document2 pagesTF06 Transitoire 06Dahou MariaPas encore d'évaluation
- SAM Transformee de LaplaceDocument17 pagesSAM Transformee de Laplacejules.michauxPas encore d'évaluation
- Cour Cine 2020-2021 Final-1Document79 pagesCour Cine 2020-2021 Final-1Salah InePas encore d'évaluation
- Devoir de Synthèse N°1 - Sciences Physiques - 2ème Informatique (2020-2021) MR Fathi JellitiDocument3 pagesDevoir de Synthèse N°1 - Sciences Physiques - 2ème Informatique (2020-2021) MR Fathi JellitiTarek MezghanniPas encore d'évaluation
- Cours de Mecanique Analytique PDFDocument99 pagesCours de Mecanique Analytique PDFAliOuchar100% (1)
- La 2379Document3 pagesLa 2379Walid Ben AmirPas encore d'évaluation
- These Audrey NEAU 2009 PDFDocument223 pagesThese Audrey NEAU 2009 PDFEmira ZrelliPas encore d'évaluation
- Chapitre 2 GRAFCET PDFDocument18 pagesChapitre 2 GRAFCET PDFCherdouh RabahPas encore d'évaluation
- Devoir de Controle +Liaisons+MécaniquesN2 1AS 2021Document4 pagesDevoir de Controle +Liaisons+MécaniquesN2 1AS 2021Razan KhPas encore d'évaluation
- Estimation Chap 1 EsbDocument10 pagesEstimation Chap 1 EsbHanane DerraaPas encore d'évaluation
- TD Groupes PDFDocument12 pagesTD Groupes PDFsoutien1040% (1)
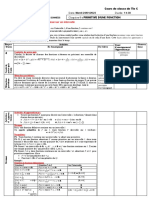
- Primitive Lecon1Document3 pagesPrimitive Lecon1FOPA GILDASPas encore d'évaluation
- Fiche Methode 12 Series EntieresDocument2 pagesFiche Methode 12 Series Entieresmd00730065Pas encore d'évaluation
- TD2 Machines 2023Document4 pagesTD2 Machines 2023Aymane ElkharoussiPas encore d'évaluation
- Acoustique Technique 64Document65 pagesAcoustique Technique 64totorino38Pas encore d'évaluation
- Abrege Dhistoire Des MathsDocument7 pagesAbrege Dhistoire Des MathsRamzi MehamdiPas encore d'évaluation
- Cinematique Du Solide PDFDocument60 pagesCinematique Du Solide PDFSameh Oussama100% (5)
- Exercices Calcul IntegralDocument33 pagesExercices Calcul IntegralShadoPas encore d'évaluation