Vous aimerez peut-être aussi
- Analyse 3Document24 pagesAnalyse 3Prince HoungbassePas encore d'évaluation
- Équations différentielles: Les Grands Articles d'UniversalisD'EverandÉquations différentielles: Les Grands Articles d'UniversalisPas encore d'évaluation
- Calcul Differentiel Dans RDocument24 pagesCalcul Differentiel Dans RPrince HoungbassePas encore d'évaluation
- Leçons sur les séries trigonométriques : professées au Collège de FranceD'EverandLeçons sur les séries trigonométriques : professées au Collège de FrancePas encore d'évaluation
- Relations D'ordre. Nombres R EelsDocument7 pagesRelations D'ordre. Nombres R Eelsomri sawcenPas encore d'évaluation
- Algèbre linéaire: Les Grands Articles d'UniversalisD'EverandAlgèbre linéaire: Les Grands Articles d'UniversalisPas encore d'évaluation
- Chapitre 3: Relations D'ordre: GénéralitésDocument3 pagesChapitre 3: Relations D'ordre: Généralitésabdel dalilPas encore d'évaluation
- Analyse 3Document25 pagesAnalyse 3Kenny GayakpaPas encore d'évaluation
- M 19 MM 1 eDocument6 pagesM 19 MM 1 eAdam BoulajoulPas encore d'évaluation
- Cours CH Reel 20 21Document9 pagesCours CH Reel 20 21Abdlekbir nainiaaPas encore d'évaluation
- 0 NotationsDocument4 pages0 NotationsPierre BrossierPas encore d'évaluation
- M 19 MP 1 eDocument6 pagesM 19 MP 1 eMaxencelebaron tekouPas encore d'évaluation
- 01.TD LogiqueDocument2 pages01.TD LogiqueHyacinthe CompaoréPas encore d'évaluation
- 2012 INPcourscontinuiteDocument21 pages2012 INPcourscontinuiteDieu Est FidèlePas encore d'évaluation
- 7-Topologie MP 2022Document56 pages7-Topologie MP 2022SoufianeMoustakbalPas encore d'évaluation
- CAPES 2013 Epreuve 1Document6 pagesCAPES 2013 Epreuve 1ogmios_94Pas encore d'évaluation
- PROBA01Document16 pagesPROBA01morPas encore d'évaluation
- Ref FCT GeneratriceDocument3 pagesRef FCT GeneratriceIkbel FridhiPas encore d'évaluation
- MP Maths Mines 1 2019.enonceDocument6 pagesMP Maths Mines 1 2019.enonceHouda BenrebeaPas encore d'évaluation
- Chapitre 1: Vocabulaire Sur Les Ensembles, La Logique Et Les ApplicationsDocument9 pagesChapitre 1: Vocabulaire Sur Les Ensembles, La Logique Et Les ApplicationsfarajPas encore d'évaluation
- Cours L1 SVDocument16 pagesCours L1 SVRodrigue AlofaPas encore d'évaluation
- Logique, Ensembles, Applications Et Relations BinairesDocument12 pagesLogique, Ensembles, Applications Et Relations Binairesmathlaayoune-1Pas encore d'évaluation
- Chapitre 14: Produit Scalaire Sur Un: DéfinitionDocument6 pagesChapitre 14: Produit Scalaire Sur Un: DéfinitionFranc ChedjouPas encore d'évaluation
- Chapitre 3Document11 pagesChapitre 3Kawtar LemhadarePas encore d'évaluation
- Resume CoursDocument7 pagesResume CoursCyrine MaamerPas encore d'évaluation
- Proba STDocument5 pagesProba STSamir BossPas encore d'évaluation
- Concours General Mathematiques 2019 SujetDocument7 pagesConcours General Mathematiques 2019 SujetAbena Bala Marc-LoïcPas encore d'évaluation
- Cvaraleatoire2122 p1p2 PetudDocument7 pagesCvaraleatoire2122 p1p2 Petudabir taamallahPas encore d'évaluation
- Cours 2020 (CH4)Document5 pagesCours 2020 (CH4)Saad KingPas encore d'évaluation
- LC 1Document229 pagesLC 1Chakib BenmhamedPas encore d'évaluation
- EDHEC2012Document3 pagesEDHEC2012Clémentine BRUGUEROLLEPas encore d'évaluation
- Chapitre 2 VADocument10 pagesChapitre 2 VAMurchy NtselePas encore d'évaluation
- Éléments Fondamentaux de Géométrie-1Document38 pagesÉléments Fondamentaux de Géométrie-1ongala.joseph.2022Pas encore d'évaluation
- MP 3 Topologie Des Espaces Vectoriels NormésDocument38 pagesMP 3 Topologie Des Espaces Vectoriels Normésdouhardflorian091Pas encore d'évaluation
- Applications, RelationsDocument4 pagesApplications, RelationsfbdbhdPas encore d'évaluation
- Chapitre 01 Logique Et Raisonnements Avec Serie D ExerciceDocument21 pagesChapitre 01 Logique Et Raisonnements Avec Serie D ExerciceBadre-eddine FriferPas encore d'évaluation
- L'essentiel Du Cours 1 2020-2021 D'alg - Bre 1Document3 pagesL'essentiel Du Cours 1 2020-2021 D'alg - Bre 1star1coachPas encore d'évaluation
- Cours D'algèbre I - 055613 - 081251 - 093957Document54 pagesCours D'algèbre I - 055613 - 081251 - 093957GedeonPas encore d'évaluation
- Chapitre 4. Variables AléatoiresDocument11 pagesChapitre 4. Variables Aléatoireslili hadjouraPas encore d'évaluation
- Mon Cours SupDocument875 pagesMon Cours Supsabir abdelilahPas encore d'évaluation
- PrepespeuclDocument5 pagesPrepespeuclbellili montassarPas encore d'évaluation
- Chapitre 2 Construction Des Nombres RéelsDocument27 pagesChapitre 2 Construction Des Nombres RéelsYvann FitialalainaPas encore d'évaluation
- Cour 3Document8 pagesCour 3NininePas encore d'évaluation
- Algebre 2015 2016 TDDocument26 pagesAlgebre 2015 2016 TDFatouPas encore d'évaluation
- Exercices & Corrigés Algèbre1 SmiaDocument25 pagesExercices & Corrigés Algèbre1 SmiaKhalilUchiha94% (18)
- TD Proba18Document18 pagesTD Proba18Herve ZoundiPas encore d'évaluation
- 2 - Theoreme Des Fonctions ImplicitesDocument5 pages2 - Theoreme Des Fonctions ImplicitesjprolinPas encore d'évaluation
- Chap LogiqueDocument12 pagesChap LogiqueTarek Ben AmorPas encore d'évaluation
- EuclidienenoDocument3 pagesEuclidienenodjidossePas encore d'évaluation
- td1 MathapproDocument2 pagestd1 Mathapprohayanifani420Pas encore d'évaluation
- TD4 Relations D - OrdreDocument4 pagesTD4 Relations D - OrdreSali Yaya FaraniPas encore d'évaluation
- Ev Applications Line AiresDocument2 pagesEv Applications Line AiresNouaman MouttakiPas encore d'évaluation
- EspacesVectoriels 2020Document56 pagesEspacesVectoriels 2020Loundou ortega100% (1)
- Travaux Dirig Es, Feuille 2: Tribus, Mesures, Fonctions MesurablesDocument7 pagesTravaux Dirig Es, Feuille 2: Tribus, Mesures, Fonctions MesurableskamilbouxaPas encore d'évaluation
- Analyse01 Chapitre01Document10 pagesAnalyse01 Chapitre01Douâa 24Pas encore d'évaluation
- Ds 1Document4 pagesDs 1Marwane Ait OuaichaPas encore d'évaluation
- Cours l3 ProbaDocument9 pagesCours l3 Probagael amisiPas encore d'évaluation
- PolyDocument58 pagesPolyozelhesaptirbuPas encore d'évaluation
- Exercice 1:: Contrölé Continu L'Ue GeologieDocument1 pageExercice 1:: Contrölé Continu L'Ue GeologieIvan Fotso NjomziePas encore d'évaluation
- PDF Tuto Dx27installation Autocad 2018 PDF - CompressDocument10 pagesPDF Tuto Dx27installation Autocad 2018 PDF - CompressIvan Fotso NjomziePas encore d'évaluation
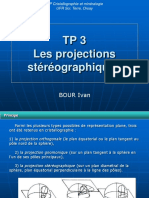
- TP3 Les Projections Stéréographiques: BOUR IvanDocument30 pagesTP3 Les Projections Stéréographiques: BOUR IvanIvan Fotso NjomziePas encore d'évaluation
- Rédigé Par:: SpécialitéDocument1 pageRédigé Par:: SpécialitéIvan Fotso NjomziePas encore d'évaluation
- Déformation Et Analyse Tectonique - Cours - M1P - GRDocument15 pagesDéformation Et Analyse Tectonique - Cours - M1P - GRIvan Fotso NjomziePas encore d'évaluation
- Professionnalisme Ethique DeonthologieDocument5 pagesProfessionnalisme Ethique DeonthologieJulien VennePas encore d'évaluation
- UntitledDocument1 pageUntitledIvan Fotso NjomziePas encore d'évaluation
- Appel A Candidatures Fspi - 200 Stages Professionnels Icc Et Patrimoine 24 Juin 2021Document5 pagesAppel A Candidatures Fspi - 200 Stages Professionnels Icc Et Patrimoine 24 Juin 2021Tagne yvanPas encore d'évaluation
- 08-Réducteur de Vitesse ClassiqueDocument1 page08-Réducteur de Vitesse ClassiqueIvan Fotso NjomziePas encore d'évaluation
- Cours D'analyseDocument73 pagesCours D'analyseAhmed MsfPas encore d'évaluation
- Ce Que Lecole Aurait Du Nous Enseigner Komlatse KomlaDocument137 pagesCe Que Lecole Aurait Du Nous Enseigner Komlatse KomlaErnest Sedjou88% (8)
- 2021 Liste WEB Sauf CCA YAOUNDEDocument16 pages2021 Liste WEB Sauf CCA YAOUNDEIvan Fotso NjomziePas encore d'évaluation
- CoursMatlab14 Sept2010Document45 pagesCoursMatlab14 Sept2010Milica SavicPas encore d'évaluation
- Chapitre3-5 Elect Et MagnDocument18 pagesChapitre3-5 Elect Et MagnIvan Fotso NjomziePas encore d'évaluation
- Centrale Supelec MP 2000 Maths 1 EpreuveDocument5 pagesCentrale Supelec MP 2000 Maths 1 EpreuveMiguel Clovis KamPas encore d'évaluation
- Econometrie PDFDocument258 pagesEconometrie PDFcedricngassPas encore d'évaluation
- Cours - Math - Fonction Continue Et Strictement Monotone - Bac Technique (2013-2014) MR Salah Hannachi PDFDocument5 pagesCours - Math - Fonction Continue Et Strictement Monotone - Bac Technique (2013-2014) MR Salah Hannachi PDFعبد الحميدPas encore d'évaluation
- Analyse Numérique - Recueil D'exercices Corrigés Et Aide-MémoireDocument131 pagesAnalyse Numérique - Recueil D'exercices Corrigés Et Aide-MémoireNihad Aghbalou80% (5)
- Document - CopieDocument226 pagesDocument - CopieAssimi Diallo100% (1)
- Démonstrations de Mathématiques de Première Année À l'INSA de LyonDocument8 pagesDémonstrations de Mathématiques de Première Année À l'INSA de LyonRobin RicardPas encore d'évaluation
- Mathématique Terminale DDocument35 pagesMathématique Terminale DibxxxPas encore d'évaluation
- Amphi 1Document49 pagesAmphi 1JerotayPas encore d'évaluation
- An1 Suites CorrectionDocument14 pagesAn1 Suites Correctionrzwqs0998100% (1)
- Cours MI Thierry FackDocument176 pagesCours MI Thierry Fackthierry DPas encore d'évaluation
- LimitesDocument17 pagesLimitesflowerPas encore d'évaluation
- T12 Cours Continuite DerivabiliteDocument13 pagesT12 Cours Continuite DerivabilitealiPas encore d'évaluation
- BAC-S1-S3-2010-corrige-1er GroupeDocument15 pagesBAC-S1-S3-2010-corrige-1er GroupeMonsieur RonePas encore d'évaluation
- TD Maths Leçon 01 LIMITES ET CONTINUITEDocument24 pagesTD Maths Leçon 01 LIMITES ET CONTINUITESylviane N'GuessanPas encore d'évaluation
- Programme Pedagogique Marocain Maths MpsiDocument45 pagesProgramme Pedagogique Marocain Maths MpsiMohamed ELouaarPas encore d'évaluation
- Cours - Rappels Et Complements Sur Les Fonctions PDFDocument18 pagesCours - Rappels Et Complements Sur Les Fonctions PDFherve joelPas encore d'évaluation
- Cour AnalDocument75 pagesCour AnalWadii ChinounPas encore d'évaluation
- Cours Analyse 1Document74 pagesCours Analyse 1Master MathPas encore d'évaluation
- New IAFDocument14 pagesNew IAFnguessan lassie100% (1)
- Chapitre 9: Dérivation: Dérivabilité en Un PointDocument11 pagesChapitre 9: Dérivation: Dérivabilité en Un PointlamsafPas encore d'évaluation
- Support de Cours MTH103Document58 pagesSupport de Cours MTH103Asaad Alass100% (1)
- Les Suites Numeriques Cours Ma PDFDocument13 pagesLes Suites Numeriques Cours Ma PDFMahfoud NatsuPas encore d'évaluation
- Cours2nde PDFDocument52 pagesCours2nde PDFJean Daniel NgohPas encore d'évaluation
- SuitesDocument6 pagesSuitesPussy GangPas encore d'évaluation
- 1s MathhDocument78 pages1s MathhDiack ModouPas encore d'évaluation
- Cours2 Fcts RefDocument2 pagesCours2 Fcts RefSabi BoulahlibPas encore d'évaluation
- TSSS2Document222 pagesTSSS2Prophète MuhammadPas encore d'évaluation
- Maths - Suites Numériques Et RéccurenceDocument7 pagesMaths - Suites Numériques Et RéccurenceAlexandre MarleauPas encore d'évaluation
- Intro CatDocument60 pagesIntro CatYdyuguPas encore d'évaluation
- Comment Etudier Une FonctionDocument4 pagesComment Etudier Une FonctionRegis KouaméPas encore d'évaluation
- Théorie relative de la musique: Maîtriser le mouvement par la logique des intervallesD'EverandThéorie relative de la musique: Maîtriser le mouvement par la logique des intervallesÉvaluation : 4 sur 5 étoiles4/5 (1)
- Physique quantique pour les débutants: Découvrez les fondements de la mécanique quantique et la façon dont elle affecte le monde dans lequel nous vivons à travers ses théories les plus célèbresD'EverandPhysique quantique pour les débutants: Découvrez les fondements de la mécanique quantique et la façon dont elle affecte le monde dans lequel nous vivons à travers ses théories les plus célèbresÉvaluation : 5 sur 5 étoiles5/5 (2)
- L'Ombre à l'Univers: La structure des particules élémentaires XIIfD'EverandL'Ombre à l'Univers: La structure des particules élémentaires XIIfPas encore d'évaluation
- Électrotechnique | Pas à Pas: Bases, composants & circuits expliqués pour les débutantsD'EverandÉlectrotechnique | Pas à Pas: Bases, composants & circuits expliqués pour les débutantsÉvaluation : 5 sur 5 étoiles5/5 (1)
- Mathématiques et Mathématiciens Pensées et CuriositésD'EverandMathématiques et Mathématiciens Pensées et CuriositésÉvaluation : 4.5 sur 5 étoiles4.5/5 (5)
- Les LES TRUCS MATHEMATIQUES AU PRIMAIRE: et si on leur donnait du sens!D'EverandLes LES TRUCS MATHEMATIQUES AU PRIMAIRE: et si on leur donnait du sens!Évaluation : 2 sur 5 étoiles2/5 (1)
- La pensée dirigée: Traité sur le raisonnement et les logiquesD'EverandLa pensée dirigée: Traité sur le raisonnement et les logiquesÉvaluation : 5 sur 5 étoiles5/5 (2)
- Sur les fondements de la théorie des ensembles transfinisD'EverandSur les fondements de la théorie des ensembles transfinisPas encore d'évaluation
- Voyager à Travers les Mondes Parallèles pour Atteindre vos RêvesD'EverandVoyager à Travers les Mondes Parallèles pour Atteindre vos RêvesÉvaluation : 4 sur 5 étoiles4/5 (11)
- L'univers est intelligent. L'âme existe. Mystères quantiques, multivers, intrication, synchronicité. Au-delà de la matérialité, pour une vision spirituelle du cosmos.D'EverandL'univers est intelligent. L'âme existe. Mystères quantiques, multivers, intrication, synchronicité. Au-delà de la matérialité, pour une vision spirituelle du cosmos.Pas encore d'évaluation
- Historique et description des procédés du daguerréotype et du diorama: Essai historique sur les sciences et techniquesD'EverandHistorique et description des procédés du daguerréotype et du diorama: Essai historique sur les sciences et techniquesPas encore d'évaluation
- Detection des collisions dans les jeux video 2D: avec C#5, WPF et Visual Studio 2013D'EverandDetection des collisions dans les jeux video 2D: avec C#5, WPF et Visual Studio 2013Pas encore d'évaluation
- Saturne: Les Grands Articles d'UniversalisD'EverandSaturne: Les Grands Articles d'UniversalisPas encore d'évaluation
- Enjeux contemporains de l'éducation scientifique et technologiqueD'EverandEnjeux contemporains de l'éducation scientifique et technologiqueAbdelkrim HasniPas encore d'évaluation
- Signe pour le Saint Graal? Énergie infinie avec des possibilités infinies! Mesurer avec l’antenne de Lecher à Carnac et en Bretagne en FranceD'EverandSigne pour le Saint Graal? Énergie infinie avec des possibilités infinies! Mesurer avec l’antenne de Lecher à Carnac et en Bretagne en FrancePas encore d'évaluation
- Le must bilingue™ du lycéen Vol. 2 - les maths en anglaisD'EverandLe must bilingue™ du lycéen Vol. 2 - les maths en anglaisPas encore d'évaluation