Vous aimerez peut-être aussi
- Chapitre 3 - Partie 2 - Introduction Aux Codes CorrecteursDocument29 pagesChapitre 3 - Partie 2 - Introduction Aux Codes CorrecteursasmaPas encore d'évaluation
- Ingénierie de Transmission Et Techniques D'accès MultipleDocument109 pagesIngénierie de Transmission Et Techniques D'accès MultipleYoussef Jamma3Pas encore d'évaluation
- Partie2 CodagedecanalparlescodeslinairesenblocDocument20 pagesPartie2 CodagedecanalparlescodeslinairesenblocCF BUSINESSPas encore d'évaluation
- Turbo CodeDocument9 pagesTurbo CodeEmad ThrPas encore d'évaluation
- Chapitre 2Document37 pagesChapitre 2Juvent GABIROPas encore d'évaluation
- Codage Canal V2 PDFDocument68 pagesCodage Canal V2 PDFOussama DariàouiPas encore d'évaluation
- Chapitre 3 Codage CanalDocument11 pagesChapitre 3 Codage CanalranacheurfaPas encore d'évaluation
- Transmissions en Bande de Base - 2 PDFDocument42 pagesTransmissions en Bande de Base - 2 PDFAnimeMusicVideo [Legend-Anime]Pas encore d'évaluation
- Code Correcteur D'erreurDocument25 pagesCode Correcteur D'erreurpicassomedia100% (1)
- Cours Transmmissions - NumeriqueDocument14 pagesCours Transmmissions - NumeriquefjosephfabricePas encore d'évaluation
- L'Algorithme de ViterbiDocument10 pagesL'Algorithme de ViterbidammakhajerPas encore d'évaluation
- Chapitre 3 Cours 1Document33 pagesChapitre 3 Cours 1Rania AkrourPas encore d'évaluation
- TIC Chap2Document13 pagesTIC Chap2abdrraoufkerPas encore d'évaluation
- Comm - Num Chap 1& 2 Bis PDFDocument59 pagesComm - Num Chap 1& 2 Bis PDFAdil EL AttarPas encore d'évaluation
- Cours TI Introduction PDFDocument7 pagesCours TI Introduction PDFBelhedi ChaimaPas encore d'évaluation
- Cours Transmission Data Tel11-Chapitre3-2021Document48 pagesCours Transmission Data Tel11-Chapitre3-2021Faïza TabbanaPas encore d'évaluation
- Chapitre 3 v3Document28 pagesChapitre 3 v3Hayfa BououdPas encore d'évaluation
- Codage de LigneDocument20 pagesCodage de LigneLi LyaPas encore d'évaluation
- 2-Aspects Mathématiques Des RéseauxDocument9 pages2-Aspects Mathématiques Des RéseauxChali JaliPas encore d'évaluation
- Chapitre 03 1Document25 pagesChapitre 03 1redouan hamidatPas encore d'évaluation
- Chapitre 3 Transmission Des Donn - EsDocument40 pagesChapitre 3 Transmission Des Donn - Esdhia bejaouiPas encore d'évaluation
- Architecturedes RéseauxDocument69 pagesArchitecturedes RéseauxMartin TraorePas encore d'évaluation
- Projet Codage FinalDocument18 pagesProjet Codage FinalOussamaPas encore d'évaluation
- Tel11 Chapitre3 2017Document46 pagesTel11 Chapitre3 2017Faïza TabbanaPas encore d'évaluation
- Commu-Num 2 DutgeiiDocument66 pagesCommu-Num 2 DutgeiiKINGOPas encore d'évaluation
- Chap1 - Codage Source Et Codage Canal - AdnenDocument5 pagesChap1 - Codage Source Et Codage Canal - AdnenChawki GhalmiPas encore d'évaluation
- Chap 3Document14 pagesChap 3Med AminePas encore d'évaluation
- S7 Codage Canal1Document64 pagesS7 Codage Canal1ceczczcPas encore d'évaluation
- Cours EN312 2Document89 pagesCours EN312 2AnimeMusicVideo [Legend-Anime]Pas encore d'évaluation
- TD REVISION Transmission RATTRAPAGE RIT2 2020Document1 pageTD REVISION Transmission RATTRAPAGE RIT2 2020Godefroy Cheumani TcheumaniPas encore d'évaluation
- Cours Trans Num 2013Document63 pagesCours Trans Num 2013Emna Ben SalemPas encore d'évaluation
- Codes de BlocsDocument12 pagesCodes de BlocsAbdouPas encore d'évaluation
- Codage - Canal I PDFDocument25 pagesCodage - Canal I PDFguyvni lekakaPas encore d'évaluation
- Cours TS219 2010 2011Document79 pagesCours TS219 2010 2011Wided Souid MiledPas encore d'évaluation
- Chapitre1 GénéralitésDocument14 pagesChapitre1 Généralitésnohaila nohaPas encore d'évaluation
- UntitledDocument2 pagesUntitledJrßñ ßelLaPas encore d'évaluation
- QSM de TelecomDocument10 pagesQSM de TelecomIyade Fe100% (1)
- Chap 2Document10 pagesChap 2amalPas encore d'évaluation
- Techniques de Codage ModerneDocument35 pagesTechniques de Codage Modernefelly mutuakashalaPas encore d'évaluation
- Electronique Numerique-Chpt3Document26 pagesElectronique Numerique-Chpt3amadouit223Pas encore d'évaluation
- Examen Codage Compression M1 2019Document2 pagesExamen Codage Compression M1 2019ranacheurfaPas encore d'évaluation
- R305 2022 CoursDocument127 pagesR305 2022 CoursTeKoPas encore d'évaluation
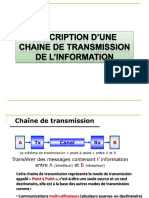
- 1-Chaine de Transmissionv3Document25 pages1-Chaine de Transmissionv3Bă ĶŕPas encore d'évaluation
- Cours2 Interface Radio LTE Last 2021Document145 pagesCours2 Interface Radio LTE Last 2021Torkia Hadjaz100% (1)
- Introduction Aux Systèmes de CommunicationsDocument87 pagesIntroduction Aux Systèmes de Communicationsabderrahmen.akkezPas encore d'évaluation
- UmtsDocument43 pagesUmtsHAMINA jeubaghaPas encore d'évaluation
- TD 01Document1 pageTD 01Ismael HabibouPas encore d'évaluation
- Cour 3-COUCHE LIAISON DE DONNEESDocument43 pagesCour 3-COUCHE LIAISON DE DONNEESMamadou MbayePas encore d'évaluation
- Chapitre 1 NotionsDocument34 pagesChapitre 1 Notionsdouahch732Pas encore d'évaluation
- Ingénierie de Transmission Et Techniques D'accès MultipleDocument101 pagesIngénierie de Transmission Et Techniques D'accès MultipleNabila Bettache0% (1)
- Examen Session Normale 2021Document1 pageExamen Session Normale 2021Youdas TairiPas encore d'évaluation
- ch2 BassesDocument98 pagesch2 BassesFadmaPas encore d'évaluation
- Codes CorrecteurDocument2 pagesCodes CorrecteurJrßñ ßelLaPas encore d'évaluation
- Revision Globale 2 - SC Dalli Oula Masrour Ma39eltchDocument2 pagesRevision Globale 2 - SC Dalli Oula Masrour Ma39eltchAnass BouHzamPas encore d'évaluation
- TD2 Reseaux1 2021 2022 FinDocument2 pagesTD2 Reseaux1 2021 2022 FinAhmed La MiriPas encore d'évaluation
- Chapitre 000Document3 pagesChapitre 000yassmine guergourPas encore d'évaluation
- CI11 8 Synthese VOIP 1 EleveDocument12 pagesCI11 8 Synthese VOIP 1 ElevecatolePas encore d'évaluation
- Les Technologies XDSLDocument38 pagesLes Technologies XDSLamaoune ayoubPas encore d'évaluation
- DS Math 1 Novembre 2021Document1 pageDS Math 1 Novembre 2021Khadija BouasidaPas encore d'évaluation
- DS 2014Document1 pageDS 2014Khadija BouasidaPas encore d'évaluation
- DédicaceDocument1 pageDédicaceKhadija BouasidaPas encore d'évaluation
- Introduire Le - Docx6Document1 pageIntroduire Le - Docx6Khadija BouasidaPas encore d'évaluation
- Chapitre4 TCP IPDocument60 pagesChapitre4 TCP IPKhadija BouasidaPas encore d'évaluation
- Cours Codage 1Document39 pagesCours Codage 1Chrischa DiopPas encore d'évaluation
- Chapitre5 Réseaux de CommunicationDocument27 pagesChapitre5 Réseaux de CommunicationvenanceharoldPas encore d'évaluation
- BNP Rib Bonheur SourireDocument1 pageBNP Rib Bonheur SourireFranciscoPas encore d'évaluation
- Cours - AZNI Mohamed - Communications Numériques 1 (UEF 21)Document46 pagesCours - AZNI Mohamed - Communications Numériques 1 (UEF 21)mimiPas encore d'évaluation
- L'Algorithme de ViterbiDocument10 pagesL'Algorithme de ViterbidammakhajerPas encore d'évaluation
- Ch2 - Niveau Liaison Protocoles Associés-8-12Document5 pagesCh2 - Niveau Liaison Protocoles Associés-8-12anasPas encore d'évaluation
- CoursDocument35 pagesCourschahrazed youtubePas encore d'évaluation
- 4) CodificationDocument4 pages4) CodificationEnzo NiniPas encore d'évaluation
- TD CodageDocument2 pagesTD CodageTeuma Mbezi MichelPas encore d'évaluation
- Comm - Num Chap 1& 2 Bis PDFDocument59 pagesComm - Num Chap 1& 2 Bis PDFAdil EL AttarPas encore d'évaluation
- RIBDocument3 pagesRIBJoe NdjamiPas encore d'évaluation
- Codage Et CompressionDocument142 pagesCodage Et CompressionselmaPas encore d'évaluation
- TD Et TP Principe Et Architecture Des Ordinateurs EtudiantsDocument7 pagesTD Et TP Principe Et Architecture Des Ordinateurs EtudiantsOlive SamassiPas encore d'évaluation
- Mesure Des Performances Des RéseauxDocument37 pagesMesure Des Performances Des Réseauxnassiri selmaPas encore d'évaluation
- x-rtd203 4Document13 pagesx-rtd203 4zaid bousminaPas encore d'évaluation
- HashesDocument3 pagesHashesAser MorganPas encore d'évaluation
- I4 TelecomDocument6 pagesI4 TelecomIgor BarattaPas encore d'évaluation
- BNP RibDocument1 pageBNP RibRimo HortonPas encore d'évaluation
- BNP Rib PDFDocument1 pageBNP Rib PDFSalim MoulayPas encore d'évaluation
- Principe HammingDocument5 pagesPrincipe HammingHicham_Karam_5857Pas encore d'évaluation
- Jshare RibDocument1 pageJshare RibDori ツPas encore d'évaluation
- 04 - Couche Laison de Données - Contrôle D - Erreur & Adressage Physique - ESTGDocument31 pages04 - Couche Laison de Données - Contrôle D - Erreur & Adressage Physique - ESTGYassmine KhanPas encore d'évaluation
- Chapitre 2Document49 pagesChapitre 2kamel mohammedPas encore d'évaluation
- Ch12-Th Info-MBDocument23 pagesCh12-Th Info-MBsafaPas encore d'évaluation
- Intro Codage Source Et Codage de CanalDocument145 pagesIntro Codage Source Et Codage de Canaltoto1234567891067% (3)
- Codage-Compression td03Document2 pagesCodage-Compression td03Nouzha BoukoubaPas encore d'évaluation
- 4 Exercices 2012Document3 pages4 Exercices 2012Kawthar HedPas encore d'évaluation
- Codage FC2Document64 pagesCodage FC2Suley Paterson100% (1)
- International Bank Account Number Bank Identifier Code International Bank Account Number Bank Identifier CodeDocument1 pageInternational Bank Account Number Bank Identifier Code International Bank Account Number Bank Identifier CodeVmika JeanPas encore d'évaluation
- Rapport VfinalDocument68 pagesRapport VfinalMahrane AIDIPas encore d'évaluation
- Scrum - Le Guide Ultime des Méthodes Agiles Essentielles de Scrum!D'EverandScrum - Le Guide Ultime des Méthodes Agiles Essentielles de Scrum!Pas encore d'évaluation
- Les 10 Secrets pour une Vie Plus Heureuse avec la Maladie de ParkinsonD'EverandLes 10 Secrets pour une Vie Plus Heureuse avec la Maladie de ParkinsonPas encore d'évaluation